气动肌肉上肢助力外骨骼系统研究
2018-01-08 08:31:04安徽师范大学附属中学
电子世界 2017年24期
安徽师范大学附属中学 彭 爽
1.引言
1.1 机械外骨骼系统简介
最初,机器人仅旨在用于工业环境中以替代人类进行重复,精确的动作。现在,机器人技术向增加机器人与使用者的交互方向发展。在这种情况下,出现了机械外骨骼(Exoskeleton)的概念。
机械外骨骼是面向人的机器人。它们可以被定义为由使用者佩戴的那些补充或是代替肢体的设备。但外骨骼并非全部是可移动或便携式的。其中很大一部分原因就是执行元件和动力源体积重量的限制。
机械外骨骼可以被看做一种增强,适应,保护穿戴者身体的技术。外骨骼可以在使用者操控的基础上扩展使用者的能力,亦可以帮助残疾使用者重新控制或代替其部分肢体。通过使用者与外骨骼之间的物理交互(Physical Human-Robot Interface, pHRI)以及感知交互(Cognitive Human-Robot Interface, cHRI)让使用者与外骨骼在感知,决策,交互多个层面上进行协作。外骨骼由脑电传感器(EEG),肌肉电传感器(EMG)以及压力传感器(pHRI)等传感器系统感知使用者决策,并由此为依据执行动作,达到与使用者的协调运动。
1.2 国内外研究现状
美国加州大学伯克利分校是较早研制下肢外骨骼机器人的机构之一,其设计的BLEEX外骨骼为一种下肢外骨骼,采用液压系统驱动。BLEEX拥有四个自由度,和使用者腿部配合。通过足底的压力传感器阵列以及液压缸与关节连接处的力传感器反求处使用者腿部运动趋势,对步态进行预判,驱动外骨骼与使用者腿部同步。实验表明,使用者身着重达100磅的外骨骼,同时背上50磅的背包在房间里行走,他所感觉到的重量只有5磅。
美国Raytheon(雷神)公司研制的XOS一代,二代外骨骼研制作为军事目的使用。外骨骼采用液压驱动,综合数据后执行相应动作。允许使用者以17:1(实际重量与感知重量)的比例举起重物,而不对使用者造成损伤。XOS系列外骨骼含有上肢,下肢,以及全身版本。
新加坡南洋理工大学也在研究和开友一种可以增强人体速度、力量和耐力的下肢外骨骼NTU Lower Extrem ity Exoskeleton,目标是使其能够帮助诸如步兵一样的操作者进行大负重、长距离的徒步行走。其中,内侧的外骨骼利用关节处的编码器来测量行走时的关节角度信号,外侧的外骨骼用来提供助力。他们的另外一个主要工作在该原型系统上利用零力矩点理论进行了外骨骼行走稳定性方面的研究。
除此之外,浙江大学的单自由度气动上肢外骨骼也成功实现了对0.5HZ力信号的跟随,稳态误差控制小于1.5%。
由以上研究分析可得,外骨骼系统可采用电机,液压,气压方式进行驱动。绝大部分助力外骨骼使用液压系统驱动。电机驱动系统的优点在于效率高,可实现精确控制,安装方便。但其效率/质量比低,难以在外骨骼中实现大范围使用。液压系统的优点在于功率/质量比大,可在小体积内产生大推力。但液压系统效率低,能量消耗极大,成本高。气压系统有工作介质清洁,效率高,重量轻,成本低等优点,但由于气缸元件的功率/质量比低,导致其难以在大功率系统上应用。但随着近年来新型气动元件,气动肌肉((Pneumatic Muscle Actuator, PMA)的出现,其优良的功率/体积比和功率/质量比,使气压驱动在外骨骼系统中逐步替代液压驱动成为了可能。
本项目将尝试使用气动肌肉为执行元件,对上肢外骨骼系统展开研究。
2.外骨骼机械设计
2.1 人体手臂结构分析
人体上肢包括肩关节,上臂,肘关节,前臂,腕关节,手部。手部与前臂通过腕关节相连,前臂与上臂通过肘关节相连,上臂与躯干通过肩关节相连。除去手部,人体上肢可用7个自由度表示。
2.2 外骨骼骨骼框架设计
为简化设计,其中选取出日常生活中常涉及到的3个自由度:肩关节的屈/伸,外展/内收,肘关节的屈/伸进行本上肢外骨骼设计。
上肢外骨骼需与使用者上肢进行动作协作,故外骨骼需与使用者拥有相似自由度及活动范围。可采用的两种设计思路如图2.2.1所示
左侧设计思路外骨骼自由度与使用者自由度完全匹配,可以方便将外骨骼与使用者的关节角度进行统一监测。右侧设计思路采用冗余自由度设计,通过运动学解算,实现外骨骼与使用者固定点的同步运动,可以避免外骨骼对使用者节的意外损害。由于本项目中仅在上肢选取了3个自由度,采用左侧设计路对其骨骼框架进行设计。实物图如图2.2.2所示:

图2.2.1

图2.2.2
外骨骼框架采用模块化设计,关节模块可在各个关节连接处通用,关节模块之间使用骨架进行连接,可以根据使用者上肢长度进行调节。骨架使用2020铝型材。关节,连接处采用5mm ABS。外骨骼分为前臂骨,上臂骨,背臂骨三个部分组成。手部外骨骼框架染色图如图2.2.3所示。

图2.2.3
图2.2.3中红色部分为前臂骨,黄色部分为上臂骨,绿色部分为背臂骨。图中灰色,紫色部分为压力环。用于外骨骼检测使用者手部运动趋势。使用者手握前臂骨前方握环,通过压力环分别固定前臂,上臂,肩部承压环支撑肩部重量,实现对外骨骼的穿戴。
2.2.1 前臂骨
外骨骼前臂骨由握环,压力环,气动肌肉固定环,关节连接模块组成。如图2.2.1.1。
关节连接模块使用608ZZ轴承与8mm光轴与上一级臂骨关节连接模块进行连接,配合使用者关节定位转动。气动肌肉固定环固定控制肘关节转动的3条气动肌肉。
2.2.2 上臂骨
外骨骼上臂骨由压力环,气动肌肉固定环,关节连接模块组成。气动肌肉固定环固定控制肩关节屈/伸的3条气动肌肉。如图2.2.2.1。
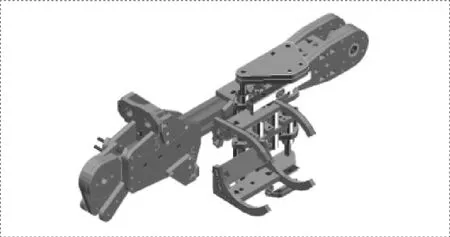
图2.2.2.1
2.2.3 背臂骨
外骨骼背臂骨由气动肌肉固定环,关节连接模块组成。如图2.2.3.1。

图2.2.1.1

图2.2.3.1
气动肌肉固定环固定控制肩关节外展/内收的3条气动肌肉。
2.3 外骨骼压力环
为实现外骨骼与使用者协调动作运行,本项目在初期采用生物电传感器,即肌肉电传感器(EMG),脑电传感器(EEG)判断使用者运动趋势,难以实现稳定的控制。后期使用物理传感器输入方式,通过压力环固定使用者手臂并监测使用者手臂与外骨骼间压力,判断使用者手臂运动趋势。压力环渲染,染色图如图2.3.1所示。

图2.3.1
外骨骼前臂,上臂各有压力环,压力环染色图中红色,黄色部分为两片滑动紧固环,由双动气缸控制,通过张开,闭合动作固定使用者手臂。滑动紧固环中滑台与固定环通过图2.3.1中绿色悬臂梁连接。压力环侧向通过悬臂梁与外骨骼骨骼框架连接。悬臂梁侧向粘接2片应变片,通过检测悬臂梁形变反求使用者与外骨骼间压力。对压力环的有限元分析如图2.3.2。
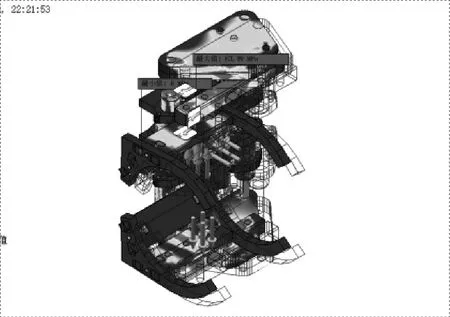
图2.3.2
使用者对紧固环施力时,形变集中在悬臂梁中心区域。压力环所使用ABS塑料屈服强度20MPa,极限拉伸强度29.6 MPa。压力环最大安全系数为15,因此压力环设计符合强度要求。实物如图2.3.3。
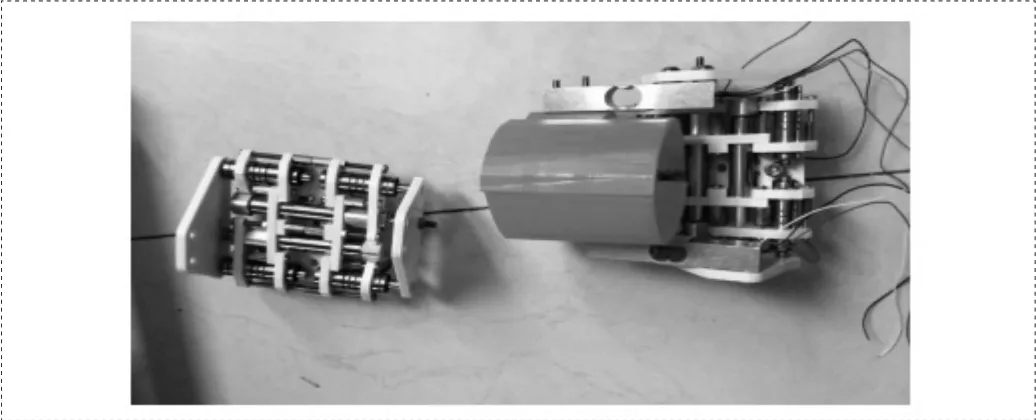
图2.3.3
2.4 外骨骼气动系统设计
2.4.1 外骨骼气动肌肉
气动肌肉是一种由压缩空气供能的气动仿生执行元件,最早由Joseph L.M cKibben医生发明。M cKibben1气动肌肉主要包括肌肉管壁与固定接头两部分,肌肉管壁通常由乳胶等刚度较小的材料与刚性较大,承载力强的尼龙编织网状材料构成;固定接头主要包括进气口及固定附件等。如图2.4.1.1。

图2.4.1.1
其工作原理是利用肌肉管壁中两种材料的不同特性,在充气时刚度较小的材料膨胀,但由于轴向运动受到刚度大的材料限制,便对外产生了轴向的收缩力。本项目中使用乳胶管,尼龙编织网,气动接头为各个关节制作气动肌肉。
气动肌肉成本低廉,具有良好的仿生特性,在小质量下可产生大收缩力。但其柔性结构与低鲁棒性使得精确控制气动肌肉十分困难。采用压电比例阀可对气动肌肉实现稳定的控制。但限于成本原因,本项目中使用中速三位五通电磁阀,借助关节处电位器角度反馈对其进行PID控制。如图2.4.1.2。
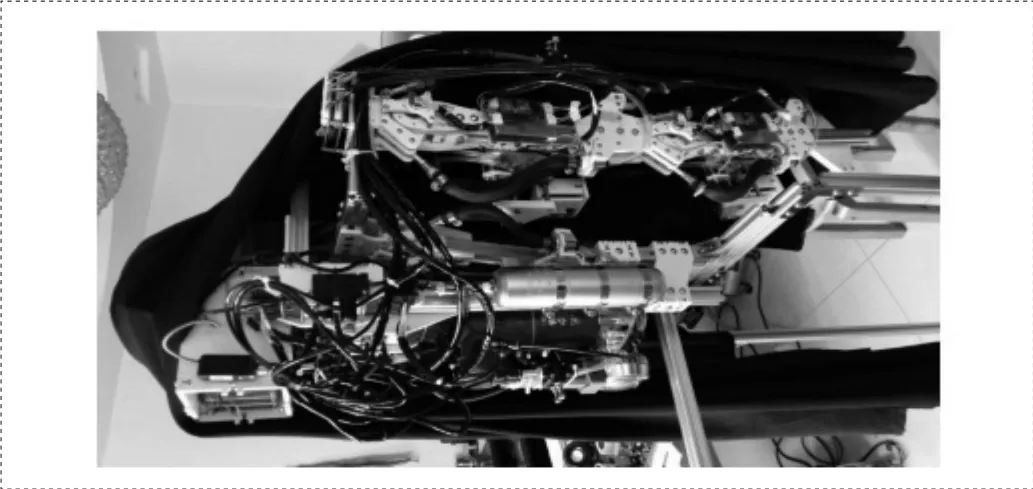
图2.4.1.2
2.4.2 气动肌肉关节连接
气动肌肉属于典型单动型执行元件,在三位五通电磁阀控制下有收缩(充气),张紧(封闭),舒张(放气)三种状态,和人体肌肉相仿。在每个独立关节处使用三根气动肌肉控制单个关节的运动,两根控制关节上举动作,一根控制关节下垂动作。如图2.4.2.1。
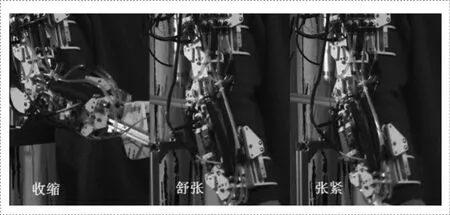
图2.4.2.1
2.4.3 气泵,电磁阀,储气系统
外骨骼需拥有独立气源支持气动元件工作。选取12V直流气泵作为外骨骼气源。使用调压阀将气压稳定于4Bar。连接0.5L气瓶起缓冲作用。
外骨骼中使用9条气动肌肉,4根独立气缸控制上肢3个自由度以及两个压力环闭合动作。使用6片三位五通中封型电磁阀对气动肌肉进行控制,2片两位五通电磁阀控制前臂,小臂压力环。三位五通电磁阀两处衔铁通电情况如图2.4.3.1。
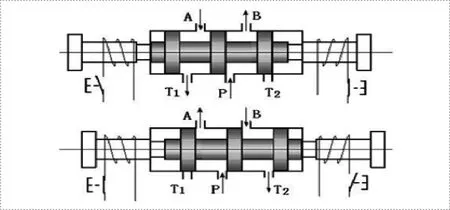
图2.4.3.1
P口为气源接口,左侧衔铁供电,B,P口联通,B口供气,A,T1口联通,A口放气;右侧衔铁供电,A,P口联通,A口供气,B,T2口联通,B口放气。外骨骼单关节处气动肌肉由两片电磁阀控制。上举肌肉同时连接至阀1A口,阀2B口,下垂肌肉连接至阀2A口,阀1B口。阀1左衔铁供电,阀2右衔铁供电,上举肌肉供气收缩,下垂肌肉放气舒张,完成外骨骼关节上举动作。阀1右衔铁供电,阀2左衔铁供电,上举肌肉放气舒张,下垂肌肉供气收缩,完成外骨骼关节下垂动作。阀1,阀2衔铁断电,上举,下垂肌肉处于密封状态,保持张紧,完成外骨骼关节张紧固定动作。
外骨骼中使用两片二位三通电磁阀控制压力环开合动作。压力环使用双动气缸作为执行元件,压力环供气时处于常开状态,衔铁供电闭合,对使用者手臂进行固定及压力检测。
3.外骨骼电子设计
3.1 外骨骼电子系统
外骨骼使用开源Arduino Mega 2560作为主控芯片。原理如图3.1.1。
系统中,Arduino mega 2560需完成对两组压力环中6支全桥应变片的读取,各关节角度电位计的读取,数据处理后对电磁阀组的控制。对气动系统气源的气压检测,控制。外骨骼系统电路简图如图3.1.2所示。
3.1.1 传感器系统
外骨骼使用压力环检测使用者运动趋势。压力环拥有三方向悬臂梁,检测使用者与外骨骼间压力情况。单根悬臂梁连接4片应变片构成全桥应变片系统检测悬臂梁形变。避免长距离采样对模拟型号造成干扰,使用HX711 AD模块将模拟型号放大并转换为数字型号读取。单只悬臂梁采样电路,实物图如图3.1.1.1所示。
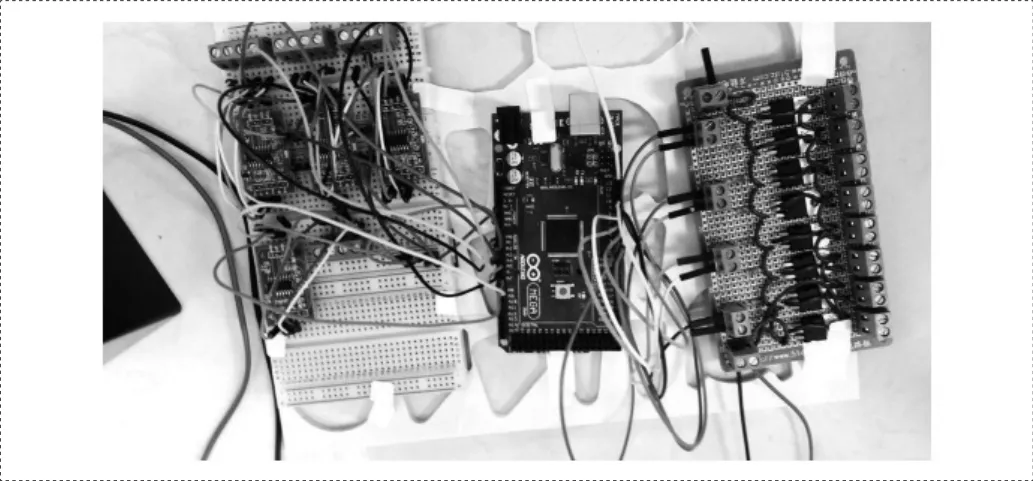
图3.1.1.1
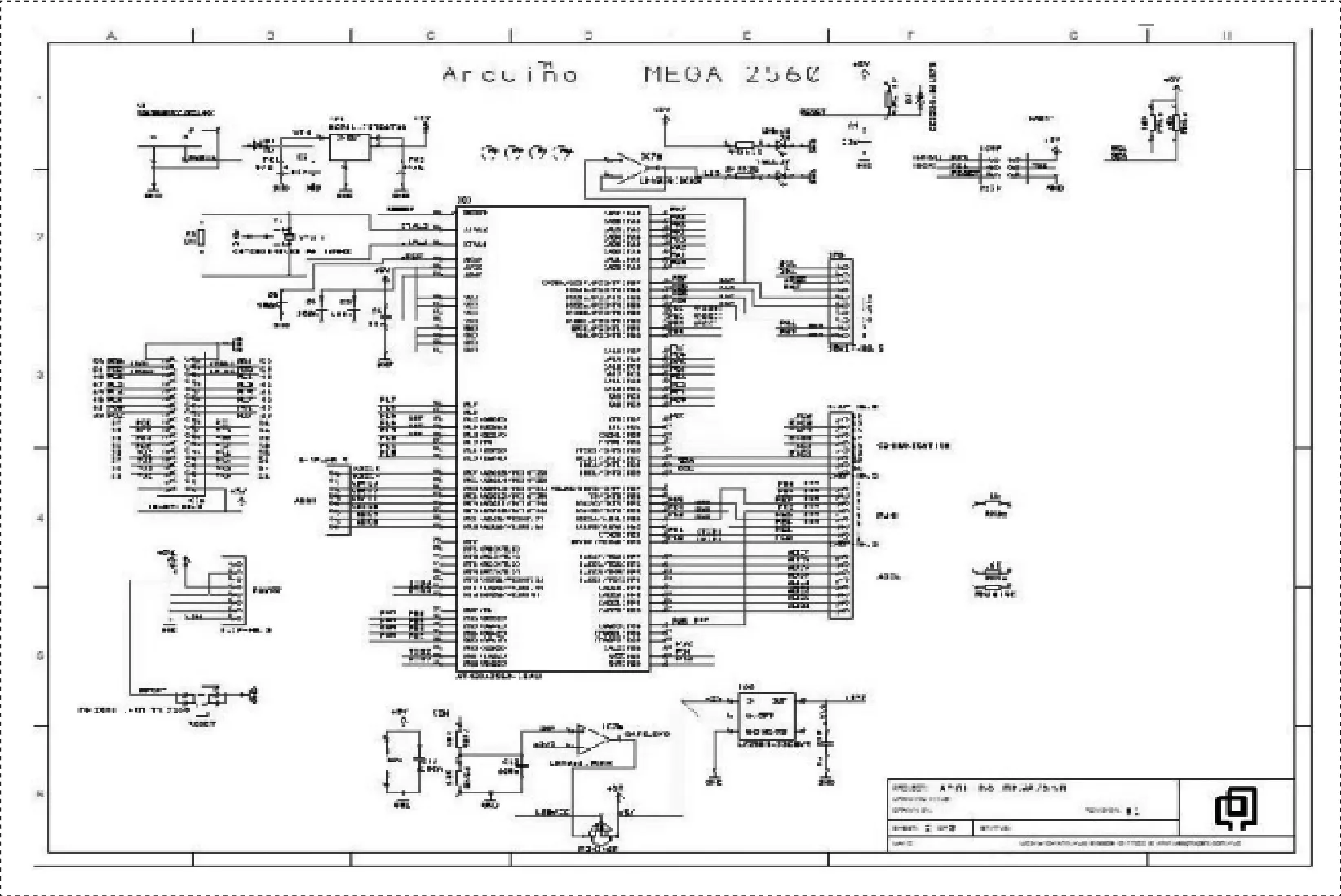
图3.1.1
外骨骼关节处含有电位计对关节角度进行采样,检测实时关节角度值。使用100K电位计,电路如图3.1.1.2所示。
3.1.2 外骨骼驱动系统
外骨骼气动系统使用8片电磁阀,使用ULN 2003A达林顿管对电磁阀进行独立控制。电路图如图3.1.2.1。
外骨骼气动系统含有独立气源,需大功率电源独立供电,使用独立Arduino nano对其控制,监测气泵电流数据,防止气泵出现过载情况。使用ULN2003A驱动两组继电器,分别控制功率电源,气泵干路,在气压稳定时控制继电器对气泵开关进行控制,在过载时对功率电源进行控制,保护外骨骼系统。电路如图3.1.2.2所示。
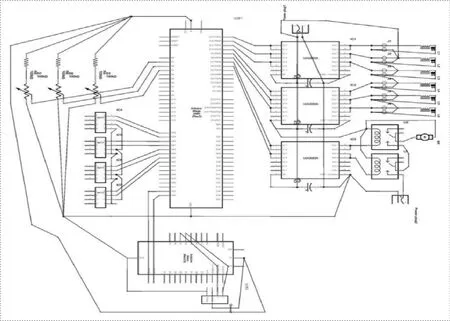
图3.1.2
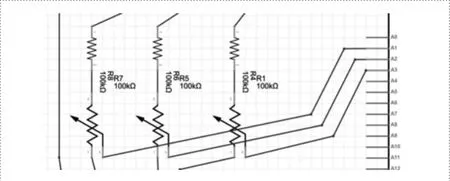
图3.1.1.2
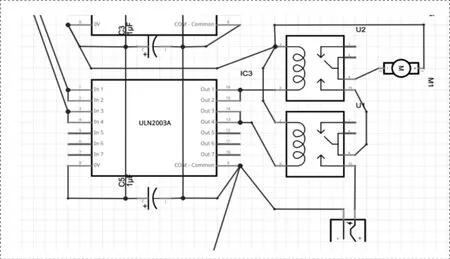
图3.1.2.2
3.1.3 外骨骼电源
外骨骼使用12V,5AH凝胶蓄电池作为主电源,为气泵,电磁阀供电。电磁阀工作电流在10A至14A浮动,导致蓄电池输出电压不稳定。独立使用7.4V,2AH锂电池为Arduino供电,在主电源过载时控制主电源,防止对外骨骼电子系统造成损害。
外骨骼的整体电路封装如图3.1.3.1。
4.外骨骼控制系统测试分析及结论
对使用者的感知是外骨骼控制部分中最具有挑战性的方面之一。pHRI是指人与外骨骼间的物理相互作用以及物理接口,在引言中有所定义。
要实现使用者与外骨骼的协调动作,外骨骼需预判使用者的运动趋势,然后执行相同的动作。本外骨骼中使用压力环实现对使用者运动趋势的感知。外骨骼在正常状态下关节肌肉均处于张紧状态,当使用者手臂产生运动趋势时,会被骨骼压力环阻碍,导致应变片电压变化。
外骨骼检测当前方向受力变化后判断出使用者运动方向趋势,控制电磁阀完成当前关节的转动,直到使用者与外骨骼间压力稳定于0。外骨骼系统在小臂,上臂上个安装有一个压力环,压力环拥有检测垂直外骨骼骨骼框架三方向力的能力。各个方向力进行合成后表示用户当前手臂运动趋势,方向。使用PID控制法对电磁阀进行控制。
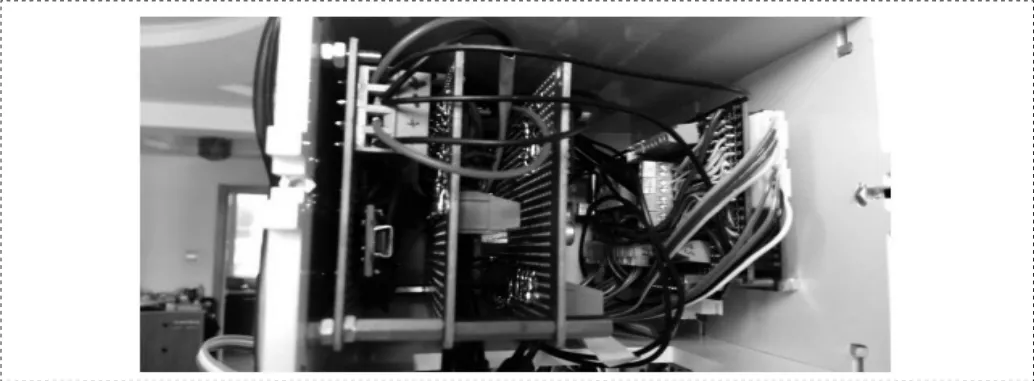
图3.1.3.1
由于气动肌肉属于单动,低鲁棒性执行元件,电磁阀响应时间慢。采用传统脉冲宽度调制控制方式难以对其运动进行精确控制。使用长时性脉冲宽度调制对其进行控制,通过PID计算出其在1S内开,合周期比,控制气动肌肉的运动。
关节处电位计起参照作用,实时监测关节转动角度,与压力环压力反馈量共同构成闭环体系对气动肌肉进行控制。控制简图如图4.1。

图4.1
对外骨骼系统的跟随测试如图4.2:

图4.2
[1]张佳帆.基于柔性外骨骼人机智能系统基础理论及应用技术研究[D].浙江大学博士论文,2009-03.
[2]牛彬.可穿戴式的下肢步行外骨骼控制机理研究与实现[D].浙江大学硕士论文,2006,01.
[3]张丹婷.基于气动肌肉的外骨骼上肢助力系统研究[D].浙江大学硕士论文,2014-02.
[4]AndrewChu,H.Kazerooni,andAdam Zoss,OntheBiom imeticDes ignoftheBerkeleyLowerExtrem ityExoskeleton(BLEEX),HumanEnginee ring&RoboticsLaboratoryUniversityofCalifornia,Berkeley,2005.
[5]H.Kazerooni,Jean-LouisRacine,LihuaHuang,andRyanSteger,Ont heControloftheBerkeleyLowerExtrem ityExoskeleton(BLEEX),University ofCalifornia,BerkeleyBerkeley,2005.
[6]Adam Zoss,H.Kazerooni,Andrew Chu,OntheMechanicalDesign oftheBerkeleyLowerExtrem ityExoskeleton(BLEEX),DepartmentofM ec hanicalEngineeringUniversityofCalifornia,Berkeley,2005.
[6]http://www.popsci.com/scitech/article/2008-04/building-realiron-man.
[7]K.H.Low,XiLiu,HaoyongYu,DevelopmentofNTUW earableExos keletonSystem forAssistiveTechnologiesaopeng,SchoolofMechanicalandAe rospaceEngineeringNanyangTechnologicalUniversity(NTU),2005.
[8]JoelC.Perry,JacobRosen,M ember,IEEE,andStephenBurns,Upp er-LimbPoweredExoskeletonDesign,IEEE/ASMETRANSACTIONSO NMECHATRON ICS,VOL.12,NO.4,AUGUST 2007.
猜你喜欢
军事文摘(2024年6期)2024-02-29 09:59:38
小火炬·阅读作文(2023年5期)2023-03-02 12:44:57
军民两用技术与产品(2022年4期)2022-06-28 02:03:04
舰船科学技术(2022年10期)2022-06-17 06:26:50
仪器仪表用户(2021年10期)2021-11-27 08:25:54
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
高师理科学刊(2020年2期)2020-11-26 06:01:16
好日子(2018年5期)2018-05-30 16:24:04
中国新闻周刊(2016年33期)2016-10-27 17:58:47
发明与创新(2015年25期)2015-02-27 10:39:14