
电动汽车滑行工况能量回收规律探究
2018-01-05 22:52
湖北汽车工业学院学报 2017年4期
(湖北汽车工业学院 汽车工程学院,湖北 十堰 442002)
电动汽车滑行工况能量回收规律探究
谭密,罗永革,黄兵峰,吴桐
(湖北汽车工业学院 汽车工程学院,湖北 十堰 442002)
以某型纯电动车为研究对象,旨在探究电动汽车处于滑行工况时的能量回收规律。判断了汽车是否处于滑行工况,分析了能量回收的条件和影响因素,确定了电机目标转矩和转矩变化规律;运用Matlab/Simulink实现汽车以不同挡位和初速度开始滑行时的建模仿真,并完成实车测试验证。结果表明:电机目标转矩与实车测试转矩基本一致,且在适当的范围内,滑行车速越高且挡位越高时能量回收率越大。
电动汽车;滑行工况;能量回收;实车测试
近年来我国电动汽车产销量迅猛增长,作为其核心技术之一的能量回收技术倍受关注。电动汽车能量回收技术是一种汽车节能技术,当电动汽车处于滑行或者制动工况时,将车辆动能通过适当的控制方法来控制驱动电机发电,所产生的电能储存于动力电池中,减少能量以热能形式耗散,有效提高能量利用率和汽车续驶里程。因此对电动汽车能量回收规律进行深入研究具有重大意义。
目前,对能量回收的研究重点主要集中在制动工况。哈尔滨工业大学的林双武提出了基于滚动优化算法对能量回收进行有限步寻优[1];清华大学的卢东斌等研究永磁同步电机在磁场定向控制下的制动原理,提出电动汽车最优制动能量回馈控制策略[2];中国汽车技术中心的徐月云等通过道路实际测试数据分析了电动汽车再生制动能量回收特性[3];吉林大学初亮等结合汽车制动动力学和ECE法规分析,提出一种基于全解耦式制动系统的串联式再生制动控制策略[4]。从上述文献中不难看出,对能量回收的研究更偏向于制动工况而非滑行工况。文中以搭载AMT两挡变速箱、采用永磁同步电机后置后驱的某型纯电动车为研究对象,重点探究电动汽车滑行工况的能量回收规律。
1 电动汽车滑行工况
1.1 滑行工况简介
滑行工况是电动汽车(简称“汽车”)行驶过程中的常见工况,是指在既没有加速踏板也没有制动踏板信号输入时,车辆在惯性作用下行驶的工况,通常分为空挡滑行和带挡滑行。文中讨论的滑行工况均属于带挡滑行。由此可见,挡位是判断滑行工况的一个重要条件,但要全面准确地判断汽车是否处于滑行工况,必须同时满足以下4个条件:挡位不为空挡、加速踏板开度为零、制动踏板开度为零、车速大于汽车自动起步工况稳定车速。若4个条件中有任意一个不能满足即认为汽车退出滑行工况而进入其他工况。根据实际的行驶状况,汽车进入滑行工况有3种途径:1)从驱动到滑行,指汽车在驱动状态时迅速松掉加速踏板;2)从制动到滑行,指汽车在制动减速状态时迅速松掉制动踏板;3)从自动起步到滑行,指汽车在自动起步后进入长下坡且车速大于自动起步稳定车速。
1.2 滑行工况受力分析
无论汽车是从驱动到滑行还是从制动到滑行,根据汽车行驶动力学分析,汽车在平直路面处于滑行工况时主要受到滚动阻力、空气阻力和电机再生制动力,3个力的合力使汽车产生一个滑行减速度,此时汽车处于减速滑行过程[5]:

式中:m为整备质量;g为重力加速度;f为滚动阻力系数;Cd为空气阻力系数;A为迎风面积;ua为车速;T为电机再生制动转矩;ig为主减速比;i0为该挡传动比;r为车轮半径;a为滑行减速度。其中T为负值,其大小直接反映汽车在滑行工况时能量回收的潜力。而汽车自动起步后进入长下坡滑行且坡度足够时,在自身重力作用下会产生的加速度使车速不断增加,当车速较高时属于相对危险的滑行情况。
2 能量回收规律
能量回收规律应该保证汽车在整个滑行过程中能量回收的普适性、高效性和车辆在行驶方向上的平顺度。作为能量回收的核心,电机应充分发挥其准确控制且响应优良的优势,尽可能多地提高能量回收率,增加汽车续驶里程。
2.1 滑行工况能量回收的条件和影响因素
电机产生的再生制动转矩能进行能量回收增加汽车续驶里程,但必须满足能量回收的条件方可进行。一般而言,能量回收要满足电机转速、再生制动转矩、发电功率、电池SOC等一系列条件,若电机转速较低、再生制动转矩较小、发电功率较低、电池SOC过高或者过低时则无需进行能量回收。能量回收的最直接表现是电池的充电电流,能量回收率则是评价汽车经济性的重要参考[6]。
滑行工况能量回收的影响因素主要有控制策略、电机、电池、变速箱挡位以及汽车使用环境等。适当的控制策略对能量回收起决定性作用;电机定子、转子电阻和自身效率对能量回收有很大影响,同时电机及其控制器要工作在适当的温度范围内,电机转速越高、转矩越大、功率越大,可回收能量就越多;电池作为能量回收后的存储装置,与能量回收关系密切,电池的温度、充电电流、SOC、能量管理策略等都将对能量回收产生直接影响;当挡位高时传动比较小所需转矩就更大,可回收的能量更多,反之可回收的能量较少;汽车使用环境对能量回收的影响涉及路况、环境温度和车况是否良好等,在车况良好、行车环境温度适宜、路况平直低阻时,可回收能量越多。
2.2 目标转矩的确定
在汽车滑行过程中,任意时刻的电机目标转矩均由电机的特性曲线确定,在基速以下时,电机输出转矩保持恒定,其功率与转速呈比例关系;基速以上时,电机输出转矩随转速增加不断减小,功率输出保持恒定。由式(1)知转矩和滑行减速度相关,而滑行减速度与初始车速和滑行距离相关:

式中:S为滑行距离;u0为初速度;u1为自动起步工况稳定车速;a为滑行减速度。
根据汽车实际要求,自动起步工况稳定车速为5 km·h-1;且在D1挡以20 km·h-1车速滑行时,最大滑行距离为30 m;在D2挡以45 km·h-1车速滑行时,最大滑行距离为150 m。同时由能量回收的条件对车速的要求,车速低于15 km·h-1(分别对应电机转速D1挡2 000 r·min-1,D2挡850 r·min-1)时不回收能量。将这些数据代入式(1)~(2)后得滑行减速度为0.5 m⋅s-2,电机再生制动转矩的最大值分别在D1挡时为-2.3 N∙m,D2挡时为-15 N∙m。
根据上述分析计算,电机在不同挡位时的转速与目标转矩关系图如图1所示。
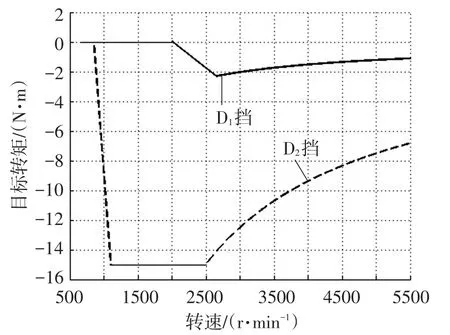
图1 滑行时目标转矩与转速关系图
2.3 电机转矩变化规律
电机目标转矩确定后,由当前转矩到目标转矩的变化过程,考虑到汽车行驶稳定性和乘客的乘坐感受,要求转矩不能产生突变。结合电机本身快速响应的特点,在不出现转矩突变的前提下还要保证尽可能快的达到目标转矩。在每个采样时刻的电机转矩变化量由当前转矩和目标转矩的差值确定。图2所示提供了2种转矩变化方式,即虚线表示线性变化规律和阶梯形变化规律。在实际应用中,由于线性变化规律对系统精度要求高,并且在当前转矩和目标转矩的差值较小时适用性不佳;而阶梯形变化规律简单易实现且适用性优势突出,因此文中转矩变化规律采用阶梯形规律。

图2 转矩差值与实际转矩变化量关系图
3 Matlab/Simulink建模仿真
根据上述汽车滑行工况能量回收规律,运用Matlab/Simulink进行汽车滑行工况能量回收建模仿真,判断汽车的行驶状态并采用适当的控制策略,模拟汽车滑行工况时能量回收情况,并通过能量回收率来表示:

式中:η为能量回收率;Er为滑行过程中整车动能变化量;ΔE为滑行过程中所回收的能量值。
3.1 Matlab/Simulink建模
汽车在滑行工况能量回收流程图如图3所示。根据图3所示流程运用Matlab/Simulink进行建模,选用汽车进入滑行工况最普遍的从驱动到滑行途径,对比在挡位和初速度不同情况下回收能量值和能量回收率的影响。滑行工况能量回收控制模型如图4所示,其中滑行子系统如图5所示。

图3 滑行工况能量回收控制策略流程图
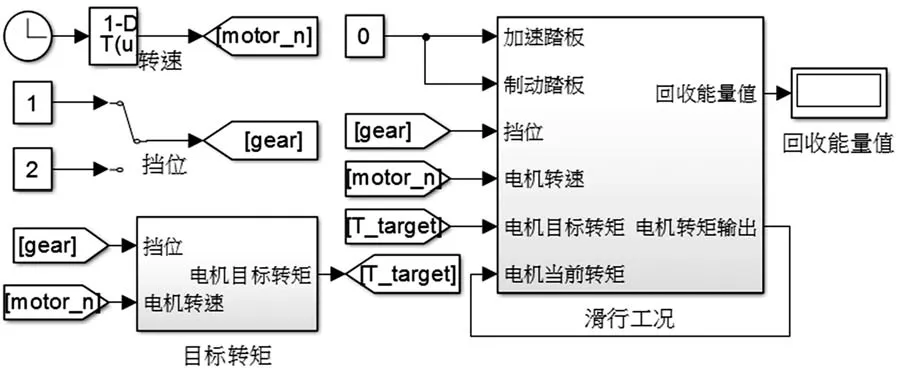
图4 滑行工况能量回收控制模型

图5 滑行子系统
3.2 仿真实验与结果
根据汽车挡位和开始滑行时初速度的不同,设置了对比仿真,分别进行了D2挡时初速度分别为50 km·h-1、40 km·h-1、30 km·h-1的3次仿真和D1挡时初速度分别为40 km·h-1、30 km·h-1、20 km·h-1的3次仿真。由于AMT变速箱换挡控制策略和电机转速的限制,D1挡时最高车速不会达到40 km·h-1,而只能达到36 km·h-1。汽车滑行工况回收的能量值和能量回收率仿真结果如表1所示。
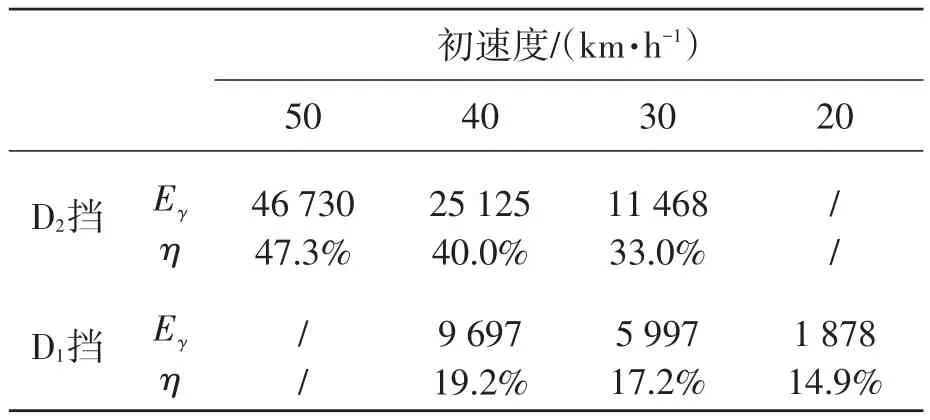
表1 滑行工况回收能量值和能量回收率仿真结果表
3.3 实车验证
针对从驱动到滑行的情况,在实车测试时根据汽车不同挡位和滑行初速度设置与仿真实验一一对应的验证实验,对滑行能量回收做具体分析。实车验证选择平直开阔路面且整个过程历时较短,可认为路况、电池SOC、汽车状况、外围环境等可能影响能量回收的因素均一致。数据采集是运用专用的数据采集系统与车上预留数据接口连接,在汽车行驶过程中对电机转速、转矩、和电池电流等数据进行时间间隔0.1 s的实时采集。根据实车测试结果,电机目标转矩和实际转矩与转速的关系对比曲线如图6所示。由图6中曲线可知:整个实车测试过程中,车辆运行平稳,未出现不正常抖动或者冲击状况。在进入滑行工况之后,电机实际转矩根据转矩变化规律由驱动时较大的正转矩迅速变到滑行时的目标转矩。在同一挡位时,不同初始车速滑行时能量回收规律基本一致。在 D1挡、电机转速为 2 500~5 500 r·min-1、再生制动转矩为-1~-2.3 N·m,D2挡、电机转速为850~5 500 r·min-1、再生制动转矩为-5~-15 N∙m时,电机发电对电池充电,实现能量回收。

图6 电机实际转矩与转速关系曲线
4 总结
根据电动汽车滑行工况能量回收规律的理论分析和Matlab/Simulink建模仿真以及实车测试验证,得出结论:1)判断电动汽车是否进入滑行工况时必须同时满足挡位不为空挡、无加速踏板输入、无制动踏板输入和电机转速高于自动起步工况稳定转速这4个条件;2)电动汽车滑行工况能量回收控制策略中电机转矩规律符合电机特性曲线,所采用的阶梯形转矩变化规律简单高效易实现,适用性高且不会造成明显抖动或冲击;3)电动汽车滑行工况能量回收率与回收能量值均与挡位和初始车速有关,挡位相同时,能量回收规律基本一致;且在一定范围内,挡位高且初始车速大,能量回收率和回收能量值就越大。
[1]林双武.电动汽车制动控制策略的研究[D].哈尔滨:哈尔滨工业大学,2010.
[2]卢东斌,李建秋,欧阳明高,等.电动汽车永磁同步电机最优制动能量回馈控制[J].中国电机工程学报,2013(3):83-92.
[3]徐月云.电动汽车再生制动能量回收特性研究[C]//中国汽车工程学会.中国汽车工程学会年会论文集.北京:中国汽车工程学会,2014:4.
[4]初亮,何强,富子丞,等.纯电动汽车再生制动控制策略研究[J].汽车工程学报,2016(4):244-251.
[5]王保华,郁俊杰.混合动力客车制动能量回馈及控制仿真研究[J].湖北汽车工业学院学报,2008(4):1-5.
[6]杨亚娟,赵韩,朱茂飞.电动汽车最大能量回收再生制动控制策略的研究[J].汽车工程,2013(2):105-110.
Research on Energy Recovery Laws of Electrical Vehicles Under Sliding Condition
Tan Mi,Luo Yongge,Huang Bingfeng,Wu Tong
(School of Automotive Engineering,Hubei University of Automotive Technology,Shiyan 442002,China)
Taking an electric vehicle as the research object,the law of energy recovery was explored when the electric vehicle is in the sliding condition.The sliding condition was judged,the condition of the energy recovery and the influencing factors were analyzed,and the law of torque and the motor torque were determined.The model of the vehicle with different gears and initial velocity was estab⁃lished and simulated by Matlab/Simulink,and the real vehicle test verification was completed.The re⁃sults show that the target torque of motor is basically the same as that of the actual vehicle test,and the higher the glide speed and the higher the gear,the higher the energy recoveryisintheappropriate range.
electric vehicle;sliding condition;energy recovery;vehicle test
U469.72
A
1008-5483(2017)04-0058-04
10.3969/j.issn.1008-5483.2017.04.013
2017-09-02
汽车零部件技术湖北省协同创新项目(2015XTZX04);湖北汽车工业学院硕士研究生创新基金项目(Y2016304)
谭密(1992-),男,陕西宝鸡人,硕士生,从事汽车电子控制技术的研究。E-mail:912458323@qq.com
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
汽车维修技师(2017年6期)2017-11-18
作文周刊·小学一年级版(2017年27期)2017-08-10
通信电源技术(2016年1期)2016-04-16
试题与研究·中考物理(2014年3期)2015-05-11
汽车维修与保养(2015年2期)2015-04-17
汽车维护与修理(2015年5期)2015-02-28
