低空无人机航空摄影高度自动测量方法研究
2018-01-05 01:10陈有林
计算机测量与控制 2017年12期
李 枫,陈有林
(青海省柴达木综合地质矿产勘查院,青海 格尔木 816099)
低空无人机航空摄影高度自动测量方法研究
李 枫,陈有林
(青海省柴达木综合地质矿产勘查院,青海 格尔木 816099)
为控制低空无人机摄影高度,获得更加清晰的地理信息图像,需要对低空无人机摄影高度自动测量方法进行优化研究;当前方法主要利用射影几何知识的自动化标定方法实现低空无人机航空摄影高度的自动测量;该方法存在噪声影响严重,且测量误差较大的问题;为此,提出一种基于多传感器与卡尔曼滤波相结合的低空无人机航空摄影高度自动测量方法;该方法首先通过分析气压测量法计算各种气压因素对低空无人机航空摄影高度的影响,然后推导出大气对流层内气压随低空无人机航空摄影高度的变化;然后采用双GPS系统同时工作,对GPS、气压高度计和IMU测量获得的低空无人机航空摄影高度信号进行冗余备份;采用基于二阶多项式的修正方法对低空无人机航空摄影传感器输出值进行补偿和修正;根据动力学方程建立低空无人机航空摄影的动力学方程获得高度测量状态方程;最后采用卡尔曼滤波的线性最小方差估计准则对低空无人机航空摄影高度进行均方差估计计算,实现低空高度自动测量与校正。实验结果表明,所提方法具有精度高、收敛性好且滤波效果理想的优势。
低空无人机;航空摄影高度;自动测量方法;多传感器;卡尔曼滤波
0 引言
为了满足我国经济建设和社会的可持续发展,需要科学、准确地获取空间地理位置信息,构建数字化中国和数字化地球框架[1]。而相关数据的获取方式一直是学术界研究的重点课题。航空摄影测量是地理位置信息获取的主要方式之一,且我国现在航空摄影测量技术的发展已经成为现代测绘及与之相关行业高效作业且不可或缺的一项技术手段,并且不断向智能化和高效化发展[2]。通常应用在地理信息的基础测绘、国土资源勘察与管理、地质勘探等众多领域。我国现在使用的各种比例尺的地形图测绘工作都是通过航空摄影测量实现的[3]。从摄影测量这门学科问世以来,摄影测量技术的发展已经有了多次突破式进展,从目标物体的模拟摄影测量、目标物体的解析摄影测量到现如今的数字摄影测量。随着摄影测量技术的不断更新发展,其作业方式也不断提升,对获取的数据信息处理方式也逐渐向自动化模式发展[4]。当时对地理信息的摄影测量整体作业流程并没有质的改变,仍然是先对地理信息进行航空摄影,然后在需要摄影的相关区域部署大量的地面控制点,再进行空中三角测量的加密运算工作,最后才能获得并制作出数字化地理地图。整个过程极其复杂繁琐,其作业周期也比较漫长,且需要花费较多的人力、物力和财力[5-6]。当前我国经济发展如此之快,这样的地理信息获取和更新效率已经无法满足正常生产需要。并且对于在摄影测量区域部署地面控制点,经常会遇到一些人们难以到达甚至是无法到达的地区和地面控制点难以选取的地区,例如荒漠、大片草原、戈壁等地区,传统的摄影测量方式都无法正常进行,从而导致了我国西部地区地理信息测绘以及更新的过于滞后,低空无人机航空摄影测量的出现使得这些问题的解决成为可能[7]。为了控制低空无人机摄影高度,获得更加清晰的地理信息图像,需要对低空无人机摄影高度自动测量方法进行研究。对低空无人机航空摄影高度进行高精度自动测量成为该领域的进一步发展亟待解决的重要问题之一。
文献[8]提出了一种基于LADRC的低空无人机航空摄影高度自动测量方法,利用LADRC确定低空无人机航空摄影高度总体控制框架,设计低扩展状态观测器观测估计低空无人机航空摄影纵向高度通道和纵向速度通道中存在的总扰动;然后在控制中引入扰动补偿,对低空无人机在航空摄影飞行过程中存在的大气紊流扰动或大气离散突风等风干扰信息分析其功率谱密度,计算风扰动对低空无人机航空摄影高度的影响、风扰动对低空无人机航空摄影时域响应特性和稳定裕度的综合目标函数;最后通过粒子群寻优算法获得低空无人机航空摄影控制器参数,实现其高度自动测量。文献[9]提出了一种基于液压支架倾角的低空无人机航空摄影高度自动测量方法,该方法在分析影响低空无人机航空摄影高度测量精度因素的基础上,通过改变低空无人机航空摄影液压支架倾角传感器安装位置,并运用卡尔曼滤波法消除大气噪声扰动等其他因素影响,从而实现高度自动测量。存在测量效率较低的问题。文献[10]提出一种基于单目视觉的低空无人机航空摄影高度自动测量方法,该方法主要利用了结合射影几何知识的自动化标定方法实现低空无人机航空摄影高度的自动测量。该方法存在复杂气流扰动影响严重的问题。
低空无人机航空摄影高度信息通常由气压式传感器获取,但其测量误差会因低空无人机航空摄影高度的降低而增大,为此提出一种基于多传感器与卡尔曼滤波的低空无人机航空摄影高度自动测量方法,并通过实验结果验证,所提方法具有较好的收敛性,且测量误差较小,很好地抑制了各种噪声影响。本文以“低空无人机航空摄影高度自动测量方法”为研究课题,对实现无人机航空摄影高度自动测量提出了一些比较新颖的方式方法。将传统的气压测量法与卡尔曼滤波法相结合,实现高度自动测量数据处理与滤波,并将其应用到低空无人机实际航空摄影中去。
1 低空无人机航空摄影高度自动测量技术
低空无人机航空摄影高度的自动测量,主要通过分析气压测量法计算各种气压因素对低空无人机航空摄影高度的影响,然后推导出大气对流层内气压随低空无人机航空摄影高度的变化,以及重力加速度与低空无人机航空摄影高度之间的关系;最后计算得到低空无人机航空摄影高度为标准气压高度。
假设a表示参考海平面(低空无人机的航空摄影高度为0)的参数值;参考海平面的大气压强分布标准值表示为Ta=288.15 K;参考海平面的密度分布标准值表示为Pa=101 325 Pa;参考海平面的的温度分布标准值表示为ρa=1.225 kg/m3,在大气对流层中,温度随着低空无人机航空摄影高度递减,即每无人机上升100 m温度下降0.65 ℃,其关系表达式如下:
T=288.15-0.0 065H1
(1)
其中:H1表示低空无人机距离参考海平面的高度。
在大气平流层中,当无人机航空飞行高度为11 000~20 000 m之间时,大气温度保持为常数,则大气压强表示为T=216.65 K;而无人机高度飞行在20 000~30 000 m之间,无人机高度每上升1 000 m,温度上升1 ℃,其关系表达式如下:
T=216.65+0.001(H1-20 000)
(2)
随着大气压强和大气密度随无人机航空摄影高度的变化,在对流层内无人机进行航空摄影时的大气压强和大气密度计算公式分别如下:
(3)
(4)
在大气平流层内,当无人机航空飞行到20 000 m高度为止,大气温度为常数,则无人机在航空摄影时的大气压强和大气密度的计算表达式分别为:
(5)
(6)
其中:P11=22 631.8 Pa;ρ11=0.36 392 kg/m3。
在20 000~32 000 m,无人机在航空摄影时的大气压强和大气密度的计算表达式分别为:
(7)
(8)
其中:P20=5 474.86 Pa;ρ20=0.088 035 kg/m3。
对于低空无人机来说,由于其动力限制和功用不同的原因,飞行高度一般在大气对流层。利用上述公式(7)、(8),推导出大气对流层内气压随低空无人机航空摄影高度的变化计算表达式如下:
(9)
根据《国际标准ISO2533——标准大气》可知,低空无人机在航空摄影时的大气气压高度HP与大气压强PH之间的关系表达式如下:
(10)
其中:Tb表示低空无人机航空摄影时参考基准平面的温度;Pb表示低空无人机航空摄影时参考基准平面的高度;PH表示低空无人机航空摄影时的测点气压;β表示低空无人机航空摄影时本层大气温度垂直梯度,在大气对流层内取值为-6.5 K/km;R表示空气专用气体常数;gn表示重力加速度。
如果忽略地球本身自转的影响,可得重力加速度与低空无人机航空摄影高度之间的关系表达式为:
(11)
其中:G表示地球引力常量;M表示地球本身质量;R′表示地球半径长度;h表示低空无人机航空摄影高度。
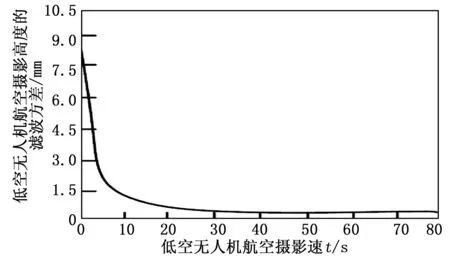
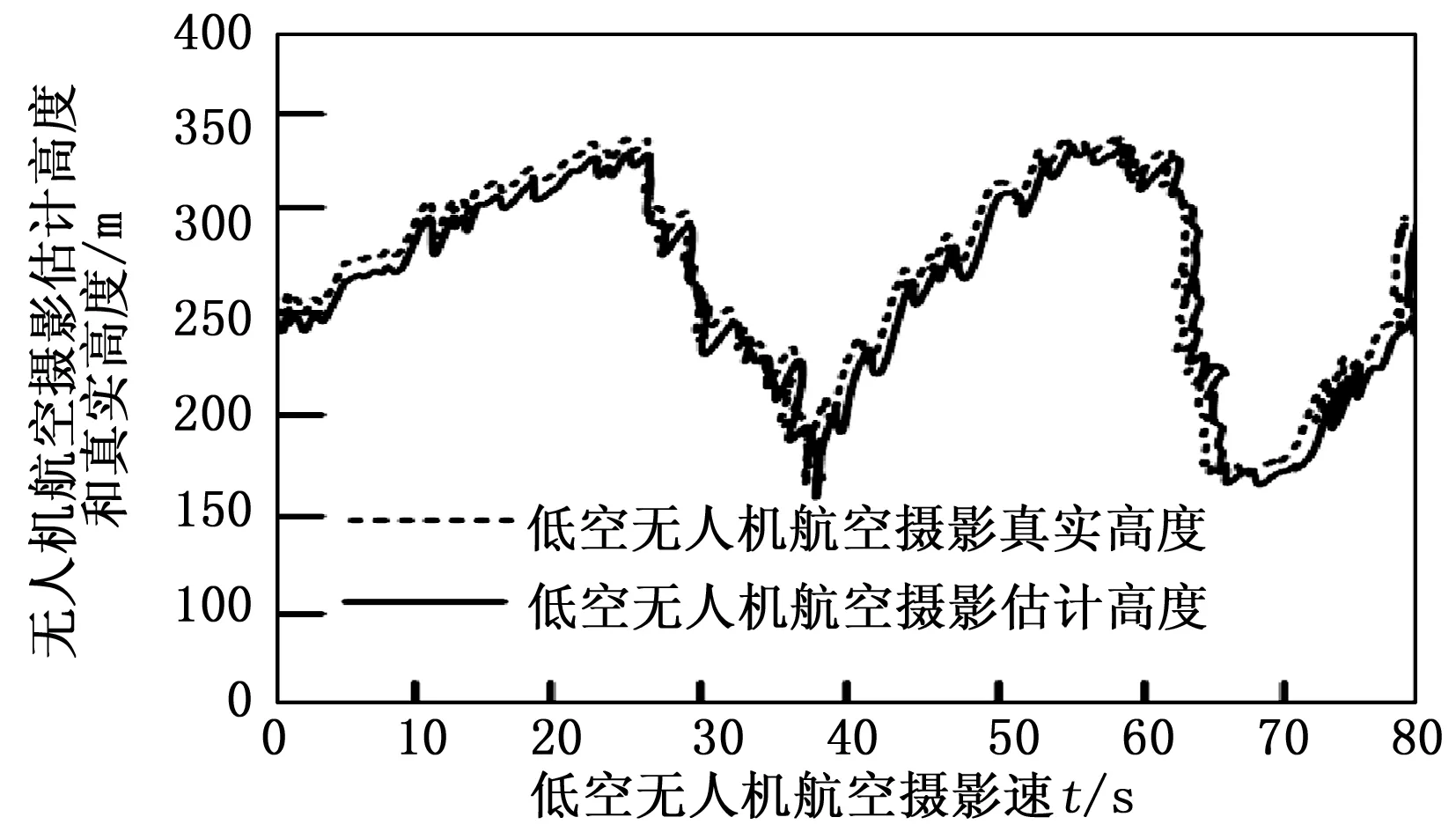
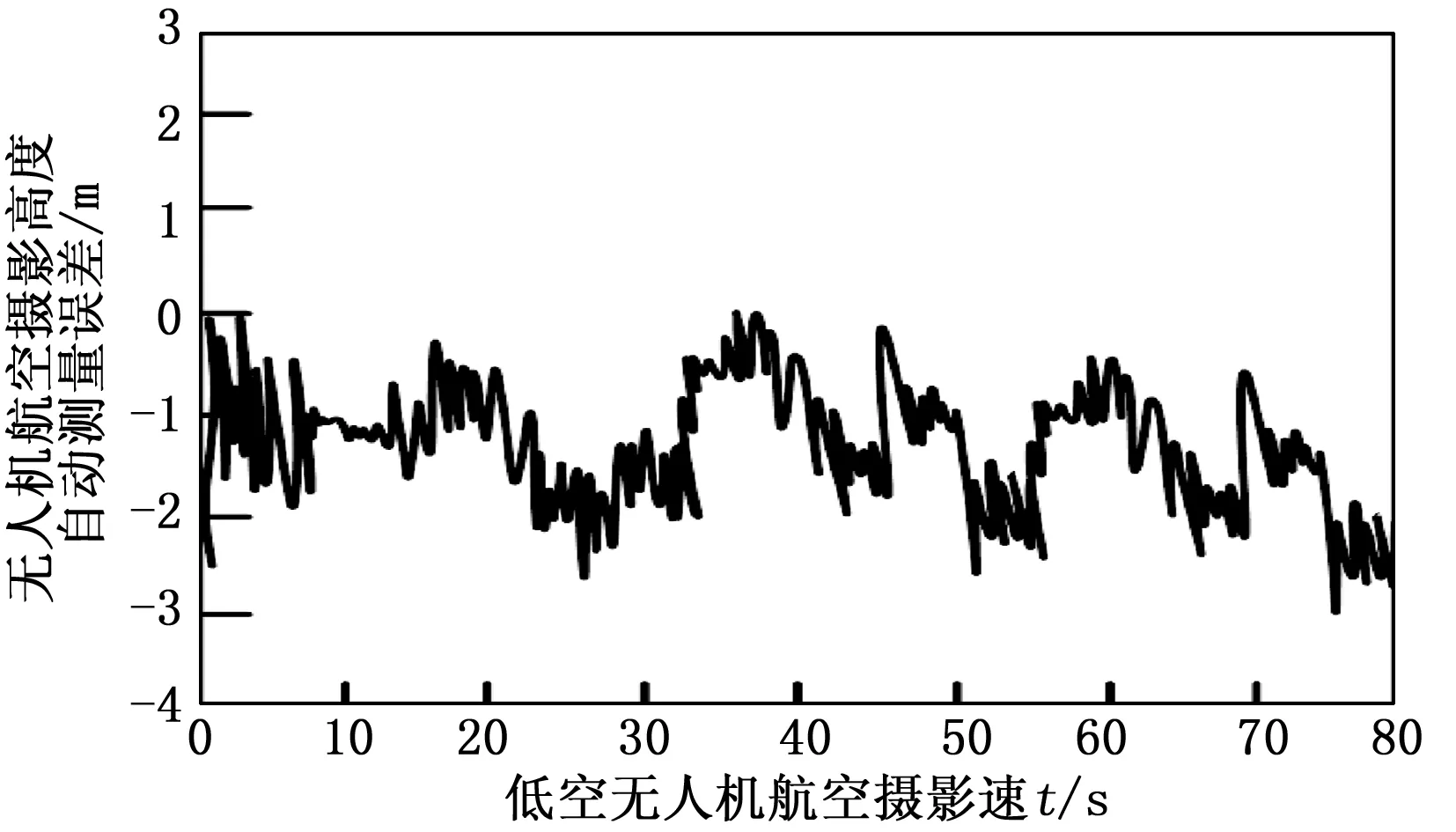
根据上述公式(11)可知,随着低空无人机航空摄影高度的不断增加,重力加速度不断减小,已知地球的平均半径约为6 371.393 km,则有h< 当参考基准平面为标准大气气压平面时,有: Tb=288.15K (12) Pb=101 325Pa (13) Hb=0m (14) 则上述公式(10)可以转换为以下公式(15),从而计算得到低空无人机航空摄影高度为标准气压高度。 (15) 当低空无人机航空摄影高度测量的参考基准平面为某一特定平面时,如低空无人机起飞点,Tb、Pb和Hb为该特定平面的气温、气压和高度值。 目前,利用气压传感器对低空无人机航空摄影高度进行自动测量时,获得的高度为绝对高度,并不是低空无人机航空摄影的真实飞行高度,无法满足低空无人机在执行起飞、着陆、掠海等任务时所需的真实高度要求。 以第1节中计算的气压测量法为基础,采用双GPS系统同时工作,对GPS、气压高度计和IMU测量获得的低空无人机航空摄影高度信号进行冗余备份。具体过程如下所述: (16) (17) 依据上述低空无人机航空摄影的传感器模型,采用基于二阶多项式的修正方法对低空无人机航空摄影传感器输出值进行补偿和修正;然后根据动力学方程建立低空无人机航空摄影的动力学方程获得高度测量状态方程;最后采用卡尔曼滤波的线性最小方差估计准则对低空无人机航空摄影高度进行均方差估计计算,实现低空高度自动测量与校正。 采用基于二阶多项式的修正方法对低空无人机航空摄影传感器输出值进行补偿和修正,其计算表达式分别如下: (18) Cτ=[C0,C1,C2]T (19) 其中:Uτ表示低空无人机航空摄影高度自动测量传感器温度补偿后的电压值;Us表示低空无人机航空摄影高度自动测量传感器温度未经补偿的电压值;Cτ表示低空无人机航空摄影高度自动测量时的温度校正系数阵;T表示低空无人机航空摄影高度测量的限定性阈值。采用二项式拟合法确定低空无人机航空摄影高度自动测量中的温度补偿,其计算表达式如下: (20) (21) (22) 其中:Ut代表低空无人机温度传感器的输出值;Ct代表低空无人机温度补偿系数矩阵;U′代表低空无人机的温度传感器输出矩阵。 根据动力学方程建立低空无人机航空摄影的动力学方程获得高度测量状态方程,其表达式为: -Vcosβsinαcosφcosθ (23) 其中:V代表低空无人机航空摄影速度;θ代表低空无人机航空摄影俯仰角;φ代表低空无人机航空摄影的迎角;β代表低空无人机航空摄影的侧滑角。 (24) 根据式(24)可以看出,低空无人机航空摄影高度测量的最小方差的均方误差小于或者等于利用其他估计准则计算得到的均方误差,依据卡尔曼滤波的最小方差无偏性质可得: (25) 则低空无人机航空摄影高度测量的估计均方差值即为估计误差的方差值,其表达式为: (26) 根据上述公式(24)和(26)来校正高度实际自动测量值。 设低空无人机航空摄影时的真实高度计算表达式为: h′=500+10sin(0.1t) (27) 低空无人机进行航海摄影时的真实垂向速度表示为: v=cos(0.1t) (28) 低空无人机进行航海摄影时的真实垂向加速度表示为: a=-0.1sin(0.1t) (29) 假设实验模拟时间t=200 s。则低空无人机航空摄影高度自动测量时的信号滤波初始状态表示为: (30) (31) 低空无人机控制系统主要包括无人机航空飞行计算机、无人机航空传感器、无人机航空摄影数据传输系统、无人机航空摄影伺服控制系统、无人机航空摄影地面监控系统。无人机航空飞行计算机采用ATMEL公司生产的型号为AT91SAM7SE(512),无人机航空飞行的辅助计算机采用ATMEL公司生产的ATmega16L,无人机航空摄影传感器主要由IMU、COMPASS、无人机专用高度气压计、无人机航空飞行GPS系统、无人机航空飞行声纳计等组成,无人机航空摄影数据传输系统主要包括无线路由装置、XTend无线模块等,无人机航空摄影伺服控制系统主要由无人机遥控器、无人机AVR解码模块、无人机4017模块和无人机5个舵机构成。无人机航空摄影地面监控系统主要包括无人机地面监控程序和PC机程序。其硬件框架和实物分别如图1、图2所示。 图1 低空无人机系统架构 图2 无人机航空飞行控制器实物图 实验结果如图3~图5所示。通过图3可以看出,低空无人机航空摄影高层自动测量的滤波误差方差是收敛的,由此说明,采用本文所提方法对获取的高度信号进行卡尔曼滤波,过程是比较稳定的。根据图4的低空无人机航空摄影的真实高度和估计高度对比,以及图5低空无人机航空摄影高度估计误差曲线可知,本文所提方法对低空无人机航空摄影高度的自动测量精确度更高,可以用来测量低空无人机进行航空摄影时所处的真实高度。 图3 低空无人机航空摄影高度滤波误差方差曲线 图4 低空无人机航空摄影真实高度与估计高度对比 图5 低空无人机航空摄影高度自动测量误差 由于低空无人机在航空飞行时有抖动、各种噪声的干扰,会使得拍摄获得的原始数据具有一定的波动,即毛刺和高度量测噪声。图6是经过卡尔曼滤波前后数据的变化曲线。 从图6中可以看出,经过卡尔曼滤波后,低空无人机航空摄影高度自动测量数据平缓很多,稳定性有所改善,在低空无人机实际航空摄影中,提高了飞行稳定性和精确性。 所提基于多传感器与卡尔曼滤波相结合的低空无人机航空摄影高度自动测量方法,由于利用多传感器组合,弥补了当前 图6 经过卡尔曼滤波前后数据的变化曲线 方法单个传感器测量误差较大的缺点,使得低空无人机航空摄影性能得到一定改善,为日后低空无人机在民用方面的普及奠定了基础。但是低空无人机航空摄影的自主飞行与控制仍然是该领域里的研究难点,而低空无人机航空摄影高度的自动测量与控制更是难点中的重点,所提方法也仍然存在一些有待提高的地方。例如在传感器性价比选择上,能够在保持传感器应用性能的基础上,选择一些精度更高的传感器。选取一些精度更理想的GPS高度传感器,将GPS测量获得的低空无人机航空摄影高度融合进去,使得测量获得的数据更加真实可靠。使得未来综合研究设计无人机的自主升降系统成为可能。 [1]贺海鹏,阎 妍,马 良,等.基于IEKF的四旋翼无人机姿态测量方法研究[J].计算机仿真,2015,32(4):56-60. [2]赵利芳,荆丽丽.大型无人机电子通讯信号抗干扰方法研究仿真[J].科技通报,2015,31(12):218-219. [3]曹 毓,张小虎,冯 莹.视觉里程计中的相机姿态和高度实时测量方法[J].传感技术学报,2015,28(9):1354-1360. [4]武瑞娟,左泽敏,冀 芳.一种飞机结构变形测量的新方法[J].科学技术与工程,2015,15(7):265-269. [5]王海洋,江 涛,路 平.三倾转旋翼无人机直升机模式建模与控制研究[J].计算机测量与控制,2015,23(8):2742-2744. [6]刘盛刚,陶天炯,马鹤立,等.基于白光频域干涉的大台阶高度测量方法[J].强激光与粒子束,2015,27(9):44-48. [7]金纪东,李思扬,王国娟.基于回旋磁场的智能液体高度测量仪[J].电子设计工程,2016,24(6):174-177. [8]齐鹏远,王 勇,张代兵.基于LADRC的无人机高精度定高控制[J].北京航空航天大学学报,2016,42(11):2472-2480. [9]陈冬方,李首滨,CHENDong-fang,等.基于液压支架倾角的采煤高度测量方法[J].煤炭学报,2016,41(3):788-793. [10]钱 鹰,张 梦.基于单目视觉的目标物高度测量[J].计算机工程与设计,2016,37(3):709-713. Research on Automatic Measurement Method of Aerial Photogrammetry in Low Altitude UAV Li Feng,Chen Youlin (Qinghai Institute of Comprehensive Geological mine Prospecting,Golmud 816099,China) In order to control the altitude of low altitude unmanned aerial vehicle (UAV) and obtain clearer geographical information images, it is necessary to optimize the height measurement method of low altitude unmanned aerial vehicle (UAV). The current method mainly uses the automatic calibration method of projective geometry knowledge to realize automatic aerial photogrammetry height measurement of low altitude unmanned aerial vehicle (UAV). The method has the problems of serious noise influence and large measurement error. Therefore, a highly automatic aerial photogrammetry method for low altitude unmanned aerial vehicle (UAV) based on multisensor and Calman filtering is proposed. Firstly, through the analysis of aerial photography has no effect on the height of the low pressure air pressure measurement method for calculation of various factors, and then push the troposphere with low pressure induced no change in aerial photography height; and then the double GPS system work at the same time, for the low altitude GPS, altimeter and IMU measurements obtained the UAV aerial photography altitude signal redundant backup; using two order polynomial correction method based on low altitude UAV aerial photography sensor output value compensation and correction; according to the kinetic equations of dynamics equation of low altitude UAV aerial photography obtained by measuring the height of the state equation; linear minimum variance estimation criterion Calman filtering of low altitude UAV aerial photography were highly variance estimation and realization of low altitude automatic measurement and calibration. Experimental results show that the proposed method has the advantages of high precision, good convergence and ideal filtering effect. low altitude unmanned aerial vehicle;aerial photography height;automatic measurement method;multi- sensor;Kalman filter 2017-07-21; 2017-08-21。 李 枫(1982-),女,宁夏平罗人,工程师,主要从事矿山测量方向的研究。 1671-4598(2017)12-0005-04 10.16526/j.cnki.11-4762/tp.2017.12.002 TP274 A2 低空无人机航空摄影高度自动测量技术应用
2.1 低空无人机航空摄影高度的传感器测量模型



2.2 低空无人机航空摄影高度自动测量方法的实现






3 实验结果与分析
3.1 实验环境与实验参数设定


3.2 实验测试与分析
4 结束语

猜你喜欢
汽车实用技术(2022年16期)2022-08-31
资源信息与工程(2021年5期)2022-01-15
军民两用技术与产品(2021年10期)2021-03-16
燃气涡轮试验与研究(2020年2期)2020-06-20
航空知识(2019年1期)2019-01-11
环球飞行(2018年7期)2018-06-27
北京航空航天大学学报(2017年9期)2017-12-18
科技创新与应用(2017年5期)2017-03-16
南方文学(2016年3期)2016-06-12
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27