小型轻便式流速仪检定系统设计
2018-01-05 00:58周树道
计算机测量与控制 2017年12期
张 龙,叶 松,周树道,王 敏
(国防科技大学 气象海洋学院,南京 211101)
小型轻便式流速仪检定系统设计
张 龙,叶 松,周树道,王 敏
(国防科技大学 气象海洋学院,南京 211101)
为满足FP系列流速仪的计量检定需求,提出了一种小型便携式流速仪检定系统的设计方案;根据匀速运动时间等约束条件确定了环形水槽的几何参数;采用FPGA和上位机作为数据处理和控制核心,实现了对伺服电机转速的精确控制;设计了光电编码器和无线摄像机与上位机之间的通信方式,实现了检定装置标准流速值和被检仪器示值的数据读取;对测试数据的处理方法和测控软件的结构框架进行了分析;同时,对实验装置的测量误差进行了分析;结果表明,标准流速值的扩展不确定度为1.28×10-3m/s,检定装置符合量值传递要求,可作为FP系列流速仪计量检定的标准装置。
FP系列流速仪;检定系统;伺服控制;数据采集;误差分析
0 引言
流速是水文观测的基本要素之一,既对水利工程建设、水资源配置等具有重要的决策作用,又与生态环境、防汛抗灾、军事行动等密切相关。准确测量流速对于掌握水资源的时空变化规律、合理开发和利用水资源等都起着极其重要的作用,已成为气象、水文、环境等多个领域的研究重点[1-2]。
目前,应用较为广泛的流速测量仪器主要有皮托管、旋桨(杯)式流速仪、热线热膜流速仪等[3-5]。近年来,随着传感器技术和信号处理技术的发展,基于声学法、光学法、图像法等多种技术的新型仪器被应用于流速测量领域,先后出现了超声波多普勒流速仪、激光多普勒流速仪、粒子图像测速仪等多种流速测量设备[6-10]。上述新型流速测量设备的出现,有效弥补了传统设备存在的缺陷,不仅提高了测量精度,并且可以实现无接触及全场流速测量,但是也存在仪器价格昂贵,操作流程复杂,使用条件苛刻等问题,使其在应用中存在较大的局限性。
FP系列流速仪是美国Global Water公司研制生产的一种便携直读式流速测量设备,凭借结构简单、可靠性高、价格低廉等优点,倍受水文工作者青睐,广泛应用于暴雨径流研究、城市排水工程、河流水文观测等领域。为保证仪器测量结果的准确一致,需对其建立完备的计量检定体系。
目前国内外通用的流速仪检定设备为直线静水水槽和检定车[11]。水槽长度多在100~200 m之间,其两侧设有轨道,检定车在轨道上以各检定速度携带被检流速仪在静水中运动。运动过程中,测控系统接收流速仪示数、检定车速度和同步时间信号,并进行数据处理和结果分析。这种方法已得到了国际标准[12-13]和国内标准[14-15]的认可,可以满足相应的准确度要求[16]。
然而,上述检定设备体积庞大,建造及维护成本高,致使专业检定设备的数量较少,难以满足现有流速测量仪器的计量检定需求。本文旨在研制一套小型轻便式流速仪检定系统,旨在减小检定设备的体积和重量,降低建造和维护成本,为FP系列流速仪及其他小型流速测量仪器提供计量保障。
1 检定系统总体设计
1.1 结构组成与设计参数
系统结构组成如图1所示,主要包括环形水槽、伺服系统和测控系统。其中,环形水槽用于为检定装置提供实验所需的静水环境;伺服系统可带动被检仪器在水槽中做圆周运动,通过调节电机转速可模拟不同的检定流速;测控系统主要包括FPGA测控模块和上位机,用于向伺服系统发送控制命令并获取系统运行的实时数据,包括光电编码器反馈的负载单元位置信息、无线摄像机的图像信息等。上位机软件可实现检定流程的自动控制,处理测试数据并生成检定结果。
系统设计目标如下:检定速度范围为0.1~4.5 m/s,扩展不确定度为0.01 m/s,装置可进行快速分解、组装、维护等工作。

图1 检定系统结构组成
1.2 FP系列流速仪简介
FP系列便携直读式流速仪结构如图2所示。流速仪由受保护的涡轮流速传感器、数据处理器和可伸缩手柄组成,其量程范围为0.1~4.5 m/s,测量准确度为0.1 m/s。手柄的伸缩长度为1.7~4.6 m,其末端的数据处理器可记录并显示测量过程的平均流速,数据更新频率为1 Hz。

图2 FP系列流速仪结构图
1.3 环形水槽
在国内外标准中,水槽长度取决于检定车的推进方式。自推进式检定车较重,加减速距离较长,因而水槽长度多数在100 m以上。例如,美国国家水文仪器中心的流速仪检定水槽长137.2 m、宽3.66 m,检定速度为0.045~3.6 m/s。俄罗斯国家流速仪检定水槽长150 m、宽4 m,检定速度为0.02~6 m/s[17]。相比之下,牵引式检定水槽较短,如德国OTT公司的水槽长度仅为50 m,宽2.9 m,检定速度为0.05~10 m/s。由于牵引式检定车较轻,加减速距离较短,故50 m的水槽已能够满足其检定速度的要求[18]。
为减小实验装置的体积、重量和建造成本,并满足其小型轻便、可快速分解组装的设计要求,装置采用环形水槽取代传统的直线静水水槽,其三维模型如图3所示。

图3 环形水槽三维模型
在设计水槽的几何尺寸时,需考虑以下几个因素的影响。
1)阻塞效应:实验水槽的储水区横截面为高度和宽度均为有限长的矩形,与自然河道的水体截面存在较大差异。因为水槽侧壁和底部的影响,使得被检仪器周边流体的运动速度加快,从而产生附加的测量误差,该现象称为阻塞效应。研究表明,当水槽横截面积与流速传感器横截面积的比值大于150时,阻塞效应在0.68以内[19]。
2)浅水效应:有限深水槽的底部会使兴起的波系与天然水体中兴起的波系不同,从而产生兴波阻力误差,称为浅水效应。理论分析表明,当水深大于被检仪器长度时,浅水效应会得到有效抑制,其误差小于1%[20]。
3)侧壁效应:侧壁效应是指水槽侧壁形成的反射波系会对水动力造成干扰,从而产生测量误差。理论上,当实验水槽和水中运动物体的宽度比大于16时,侧壁效应可得到有效抑制,其误差小于0.5%[20]。
4)读数要求:根据数据处理需要,被检仪器在绕水槽一周过程中,其匀速运动时间应不少于3秒,故需选择合理的水槽圆周长度。水槽长度主要由动力系统加速性能、匀速段运动时间和实验室面积等因素决定。
综合考虑水动力要素、传感器大小、伺服系统参数、实验室面积、匀速运动时间等影响因素,可得环形水槽几何参数约束方程如式(1)所示:
(1)
式中,SP为实验水槽横截面积;SI为流速传感器横截面积;HP为实验水槽深度;WP为实验水槽宽度;LI为流速传感器长度;WI为流速传感器宽度;r为流速仪转动半径;a为流速仪线加速度;Vmax为最大检定速度;R为环形水槽外半径;
根据式(1)可求得环形水槽几何参数的可行域,在可行域内选取环形水槽各几何参数如下:储水区宽度0.8 m,流速仪转动半径2.8 m,内环半径2.4 m,外环半径3.2 m,储水深度1.0 m。根据上述参数,验证阻塞效应、浅水效应、侧壁效应等水动力要素,结果如下:水槽与流速传感器横截面积的比值约为630,满足阻塞效应要求;水槽储水深度远大于流速传感器长度,满足浅水效应要求;水槽与流速传感器宽度的比值为20,满足侧壁效应要求。
1.4 水槽隔板
为消除流速仪运动尾流对其后方流场的干扰,在水槽中安装隔板,其结构如图4所示。流速仪从水槽隔板后侧启动,加速至目标流速后保持匀速运动。在此过程中,测控系统读取装置运行的各项参数。被检仪器旋转一周至隔板前侧时,切断伺服电机电源,流速仪依靠惯性撞开弹簧门,在无动力状态下运动直至停止。流速仪通过后,弹簧门在弹性铰链作用下恢复原位。待水流静止后,重复上述过程,完成其他速度下的检定。

图4 水槽隔板三维模型
1.5 伺服系统
实验装置伺服系统包括伺服电机、减速机构、传动臂等,其三维模型如图5所示。伺服驱动器接收FPGA的脉冲信号,精确控制电机转速;减速机构由减速器和齿轮组构成,可根据转速要求设置减速比;传动臂通过连接件与转轴相连,其末端固定被检仪器;旋转编码器通过弹性联轴器与主轴连接,用于测量并反馈被检仪器的位置信息。
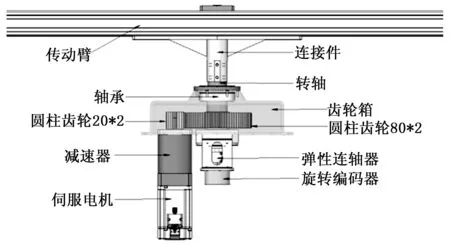
图5 伺服系统结构组成3测控系统设计方案
2 测控系统设计方案
2.1 结构组成与工作流程
根据上述设计要求,测控系统结构如图6所示,包括计算机、无线摄像机、无线通信模块、FPGA控制模块、伺服电机及驱动器和光电编码器,主要完成与上位机的通信和电机精确控制,读取被检仪器示数和位置信息并传输至上位机,根据设定的数据处理方法计算检定结果。

图6 测控系统结构组成
测控系统工作流程如图7所示:FPGA通过伺服驱动器精确控制电机转速,使被检仪器在环形水槽中以预定速度做圆周运动。在此过程中,无线摄像机拍摄被检仪器的流速示值并将图片传输至上位机,识别图片中的流速仪示值并将数据读入上位机软件。光电编码器精确测量被检仪器的转动角度,并将测量结果反馈至上位机。上位机软件根据标准器和被检仪器的测量结果,计算被检仪器在各个检定速度下的系统误差,记录测试数据并生成检定结果。

图7 测控系统工作流程
2.2 测控系统硬件设计
2.2.1 测量标准器
在该系统中,标准流速值v0属于间接被测量,是由转动角度α、转动半径R和采样时间T三个直接被测量转换而来,故需分别测量α、R和T的标准值。
1)角度测量标准:光电编码器是一种集光学、机械、电子等多学科于一体的角度传感器,具有抗干扰能力强、分辨率高、可靠性好、体积小、重量轻和易于维护等优点。通常安装于机械设备转轴上,可将旋转轴的角度位移量实时转换为数字编码脉冲,并传输给计算机或其他测控设备,为机电系统的闭环控制提供位置反馈信息。将转轴位置信息与时间信息相结合,还可以获得其速度、加速度等信息,可用于系统的闭环反馈控制[21-22]。本文中选取AFS60A型光电编码器作为角度测量标准器,通过精确测量转动角度和采样时间,可计算出加速时间、加速距离等信息。
2)长度测量标准:激光测距仪是利用激光进行目标物距离测量的仪器,具有体积小、重量轻、操作简单等优点,在测控领域应用广泛。本文中选取BOSCH GLM150型激光测距仪作为长度测量标准器,其测量范围为0.05~150 m,测量精度为±1 mm,可精确测量被检仪器的转动半径,结合角度标准值和时间标准值,可求得被检仪器的运动线速度。
3)时间测量标准:装置选用Xilinx Spartan-6系列FPGA器件,设定时钟频率为100 MHz,可作为时间测量标准器。
2.2.2 伺服驱动系统
速度伺服的逻辑结构如图8所示。对于伺服系统来说,速度伺服可视为位置伺服的一部分,二者属于串联关系。位置偏差量经比例控制器KPP运算后得到修正值,并送入速度控制单元进行速度控制。位置偏差量的修正信号转变为速度伺服的模拟电压信号。在速度控制中,编码器将脉冲信号反馈至位置伺服单元,将转换后的速度信号反馈至速度伺服单元,从而实现系统的闭环反馈控制[23]。

图8 速度伺服逻辑结构
2.3 测控系统软件设计
根据实验装置的硬件结构和工作流程,测控软件需满足如下要求:实现测试检定工作的自动化,系统可以根据设定的参数自动完成测试检定工作,并生成具体的测试检定结果;具有数据存储与查询功能,可保存测试检定结果;可以进行基本参数设定、通信端口设置、数据导入导出、人员信息管理和登录权限设定等。
按照上述功能要求,测控软件可分为系统登录、仪器管理、测试管理、检定管理、通信模块、系统信息维护和历史数据查询等7大模块,系统各主要功能模块如图9所示。
1)系统登录模块:判定用户身份,实现分权限登录以及注销功能;
2)仪器管理模块:在进行测试检定前,对被检仪器辨识信息与计量性能等进行登记并可进行修改、删除等管理维护操作;
3)测试管理模块:根据任务要求,对测试检定流程进行监控与管理,并对所得数据进行初步处理;系统执行测试任务时,其它功能模块将被禁止;
4)检定管理模块:对相关仪器的检定规程进行管理,并能按照仪器检定规程的规定,自动执行检定任务,对实验数据进行处理并给出检定结果;系统执行检定任务时,其它功能模块将被禁止;
5)通信模块:测试和检定管理模块实现的基础,主要与FPGA进行通信,实现对标准装置的监控功能,获得标准器测量数据;
6)系统信息维护模块:人员管理功能,一般权限账户实现个人信息和密码的维护及更新,管理员账户除此功能外还能对系统登录人员进行管理;对数据的备份与还原功能;对上位机与下位机通信端口配置功能;
7)历史数据查询模块:对测试检定数据、结果进行查询与管理,审核员可以对结果进行审核,审核通过后可生成测试报告、检定证书等。
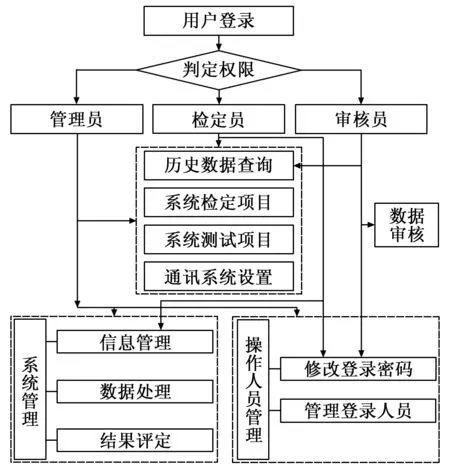
图9 测控系统软件功能模块
2.4 数据处理方法
为获得更准确的测量结果,FP系列流速仪采用累加平均的数据处理方式,即显示自测量开始时刻至最近一次数据更新时刻整个时间段内的平均流速。测控系统需计算匀速运动时被检仪器各采样时刻之间的平均流速值以及检定装置测得的标准流速值。
以流速检定点v0=4.5 m/s为例,说明该装置的数据读取及处理方法。伺服系统带动被检仪器加速至检定流速v0=4.5 m/s,此后进行匀速运动。随着测量时间的延长,被检仪器示值逐渐接近于检定流速。根据伺服系统的相关参数和流速仪的测量特性,可得实验装置的标准速度曲线和被检仪器的示值变化曲线如图10所示。

图10 速度变化曲线
在匀速段内,设ti时刻编码器测得角度值为αi,则在[ti,ti+1]时间段内,实验装置的平均运动速度为:
(2)
设实验装置的匀速运行段可分为N秒,则标准流速值为:
(3)
设tj时刻被检仪器示数为vj,则在[tj,tj+1]时间段内,被检仪器测得的平均流速:
(4)
计算整个测量过程中各个时间段内测量误差的平均值,可求得被检仪器的系统误差Δv:
(5)
3 检定系统测量误差分析
3.1 函数随机误差数学模型
间接测量是指测量与被测量相关的其他量,通过已有函数关系计算出被测量的过程。因此,间接测量误差是各直接被测量测量误差的函数,称为函数误差[24]。
在该系统中,计算标准流速值v0的数学模型如公式(6)所示:
(6)
式中,v0为各检定点标准流速值;α为转动角度;R为转动半径;T为采样时间;
其标准流速值v0为间接被测量,是直接被测量α、R和T的函数。作为测量标准装置,其系统误差可不予考虑,本文将重点讨论间接测量的函数随机误差。
随机误差是指测量过程中一系列有关因素的微小随机波动造成的误差,常用测量的标准差来表征其离散程度。函数随机误差的合成常采用方和根方法,公式如下:
(7)
式中,σ为间接被测量的标准差;σi为各直接被测量的标准差;ai为各直接被测量误差传递系数;n为直接被测量个数;ρij为各直接被测量的相关系数;
在该系统中,直接被测量α、R和T互不相关,则相关系数ρij=0。根据式(6)和(7),可求得标准流速值v0的测量标准差:
(8)
3.2 各直接被测量的标准差
1)角度测量标准差:根据AFS60A型光电编码器的技术指标,其最大测量误差为0.03°,转化为弧度为Δα=1.67×10-4π。设该误差服从正态分布,取置信概率为99%,置信因数k=3,则角度测量标准差σα=5.57×10-5π。
2)半径测量标准差:装置选用BOSCH GLM150型激光测距仪,其最大测量误差为ΔR=10-3m。设该误差服从正态分布,取置信概率为99%,置信因数k=3,则半径测量标准差σR=3.3×10-4m。
3)时间测量标准差:装置选用Xilinx Spartan-6系列FPGA器件,设定时钟频率为100 MHz。因流速仪示值更新时刻与光电编码器采样时刻无法实现完全同步,则时间不同步造成的最大偏差为ΔT=10-8s。设该误差服从正态分布,取置信概率为99%,置信因数k=3,则时间测量标准差σT=3.3×10-9s。
3.3 合成标准差
当检定速度取最大值时,运动时间T最小,此时T的取值范围为T<5 s。由上文可知,α的最大取值为2π,R的取值为2.8 m,由此可获得标准流速值v0的最大测量标准差σv0≈4.26×10-4m/s。取置信概率为99%,则标准流速值v0的扩展不确定度为Uv0=3σv0=1.28×10-3m/s,远小于实验装置预期的扩展不确定度0.01 m/s。因此检定系统计量特性满足设计要求,可作为FP系列流速仪检定的标准装置。
4 结论
本文提出了一种小型轻便式流速仪检定系统设计方案,并对其结构组成和工作流程进行了介绍,依据阻塞效应等约束参数设计了环形水槽的几何尺寸,对测控系统的软硬件功能和控制逻辑进行了深入分析,设计了采用FPGA进行伺服系统控制和信号采集的方案,实现了测控软件与FPGA模块和无线摄像机的数据通信,并对实验装置的测量误差进行了分析。结果表明,标准流速值测量结果的的扩展不确定度为1.28×10-3m/s,远小于预期的扩展不确定度0.01 m/s。因此实验装置的计量特性满足设计要求,可作为FP系列流速仪检定的标准装置。
[1] 文 华, 朱玉琛, 付 广. 流速仪在国内外的研究现状[J]. 舰船防化, 2007(3):43-45.
[2] Bruvik E M, Hjertaker B T. Liquid characterisation and measurement of fluid properties for reduced uncertainty in multiphase flow area fraction measurements [J]. Flow Measurement & Instrumentation, 2015, 47:10-18.
[3] 顾玉兵, 王 冰, 王裕会,等. 基于皮托管原理的动态流速仪[J]. 仪表技术与传感器, 2009(s1):406-409.
[4] 汪拥赤, 王云莉. 河工模型中旋桨式流速仪及特殊传感器的应用[J]. 仪器仪表学报, 2003, 24:142-143.
[5] Ardekani M A, Farhani F. Experimental study on response of hot wire and cylindrical hot film anemometers operating under varying fluid temperatures [J]. Flow Measurement & Instrumentation, 2009, 20(4/5):174-179.
[6] Chanson H, Trevethan M, Aoki S I. Acoustic Doppler Velocimetry (ADV) In Small Estuary: Field Experience and Signal Post-Processing [J]. Flow Measurement & Instrumentation, 2008, 19(5):307-313.
[7] Eckert S, Gerbeth G. Velocity measurements in liquid sodium by means of ultrasound Doppler velocimetry [J]. Experiments in Fluids, 2002, 32(5):542-546.
[8] Fischer A, Pfister T, Czarske J. Derivation and comparison of fundamental uncertainty limits for laser-two-focus velocimetry, laser Doppler anemometry and Doppler global velocimetry [J]. Measurement, 2010, 43(10):1556-1574.
[9] Adrian R J. Twenty years of particle image velocimetry [J]. Experiments in Fluids, 2005, 39(2):159-169.
[10] 田桂良. 流速仪检定系统性能的改进与研究[D]. 南京:东南大学, 2012.
[11] GB / T 21699-2008, 直线明槽中的转子式流速仪检定/校准方法[S].
[12] ISO2537-2007, Hydrometry rotating element current meters[S].
[13] ISO3455-2007, Hydrometry calibration of current meters in straight opentanks [S].
[14] GB/T 11826-2002,转子式流速仪[S].
[15] JJG(SL)001-2009,转子式流速仪[S].
[16] 姚永熙. 国内外转子式流速仪检定方法分析[J]. 水文, 2012, 32(3):1-5.
[17] Hubbard E F,Thibodeaux K G. Quality assurance of USGS stream current meters: the meter exchange program 1988-98 [R]. USGS open-file report, 99-221.
[18] Dave Johnstone. Current meter calibration equations: a review of the adequacy of limited-range equations for New Zealand requirement [R].2008.
[19] 唐 勇, 徐 猛, 李华梅,等. 船模拖曳水池实验室工程设计研究[J]. 造船技术, 2016(2):69-74.
[20] 周徐斌, 马 捷. 基于相似理论的海洋温跃层模拟水池研究[J]. 中国舰船研究, 2012(6):63-70.
[21] 姜 义. 光电编码器的原理与应用[J]. 传感器世界, 2010, 37(2):16-19.
[22] 马玲芝, 李 鸿. 基于国产FPGA的增量式光电编码器测速电路研究[J]. 计算机测量与控制, 2016, 24(1):233-236.
[23] 颜嘉男. 伺服电机应用技术[M]. 北京:科学出版社, 2010.
[24] 费业泰. 误差理论与数据处理[M]. 北京:机械工业出版社, 2010.
Design of Small and Portable Verification System for Hydrometric Propeller
Zhang Long, Ye Song, Zhou Shudao, Wang Min
(College of Meteorology and Oceanography, National University of Defense Technology, Nanjing 211101, China)
In order to meet the measurement requirement of the FP series hydrometric propellers,a design scheme of a portable test and verification system is presented in this paper.The geometric parameter of the annular flume is designed based on the constraint conditions such as uniform motion time. FPGA and upper monitor are used as the core of data processing and control which can control the rotation speed of servo motor accurately.The communication mode between photoelectric encoder and wireless camera with upper monitor is designed. Consequently, the standard flow velocity value and the flow probe indication value can be read into the upper monitor.In addition, the processing methods of test data and the structure of control software are analyzed.Furthermore, the measurement error of the experimental device is studied. The results show that the expanded uncertainty of standard flow velocity is 1.28×10-3m/s, which meets the design requirement of the calibrating device. In other words, the device can be used as the calibration standard device of FP series hydrometric propellers.
FP series hydrometric propellers; verification system; servo control; data acquisition; error analysis
2017-02-21;
2017-03-21。
国家自然科学基金(40976062);江苏省自然科学基金(BK2012513);国家自然科学基金青年基金(41406107)。
张 龙(1992-),男,山东潍坊人,硕士研究生,主要从事海洋水文仪器及其计量技术方向的研究。
叶 松(1970-),男,江苏南京人,副教授,硕士生导师,主要从事海洋水文仪器及其计量技术方向的研究。
1671-4598(2017)12-0034-05
10.16526/j.cnki.11-4762/tp.2017.12.009
TH764
A
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
发明与创新·小学生(2021年11期)2021-12-24
发明与创新(2021年43期)2021-12-15
锻压装备与制造技术(2021年5期)2021-11-13
科学技术创新(2021年5期)2021-03-17
中国船检(2020年11期)2020-11-27
——编码器
演艺科技(2020年7期)2020-08-13
小天使·五年级语数英综合(2018年9期)2018-10-16
设计(2017年14期)2017-10-31
山东工业技术(2016年15期)2016-12-01