智能变电站遥控故障的观察与处理分析
2018-01-04 05:09:32
四川电力技术 2017年6期
(国网成都供电公司,四川 成都 610041)
智能变电站遥控故障的观察与处理分析
李游
(国网成都供电公司,四川 成都 610041)
为提高智能变电站的自动化维护质量和效率,根据现场的主流自动化厂商设备进行遥控故障全过程的研究分析,提出智能站遥控故障的可信观察窗定位方法。在分段验证阶段进行了不同阶段的相似与差异性总结,提出了1套基于104规约的智能变电站遥控故障分析的解决方案和分析流程。最后通过流程图明确遥控故障观察点与处理分析过程,旨在让二次维护人员在面对频繁更新的规范技术要求和大量的智能站自动化维护工作的同时对智能站遥控各环节有更深入理解。
智能变电站;遥控;故障分析;观察窗定位;分段验证;104规约
0 引 言
在大规模普及智能变电站综合自动化过程中, 目前虽然已针对数据通信网关机、同步相量测量装置、电力系统时间同步及监测、网络报文记录及分析装置、测控装置等设备的技术规范标准已都发布大量对应企标。但在实际应用过程中,不同厂家自动化设备在外观接口、装置界面和装置参数配置方面仍存在不少细节上差异。特别是测控装置的智能终端的控制字、定值的设定在自动化工作中会产生新的困惑。遥控功能是监控系统的重要组成部分,变电站里的断路器、隔离开关以及保护压板都是遥控对象。当变电站的遥测和遥信数据异常时,对主设备影响不是很大,但是遥控操作异常时将直接影响到电网的安全稳定运行,轻则造成遥控拒动,延误停送电,重则造成遥控误分合闸事故[1]。
通过分析发现不同自动化厂商的装置之间差异性配置是影响智能站遥控功能的重要因素。因此现将所使用的自动化设备通过表1列举以供参考。
此外,考虑目前智能站和主站通讯主要采用IEC 60870-5-104规约,因此所表述的智能站遥控

表1 涉及的自动化设备
过程均基于104规约。
1 遥控类型及操作过程
1.1 遥控类型
遥控类型主要有增强型控制和普通控制两大类,其中增强型控制需要对控制的结果进行校验,以判断执行过程是否成功;普通控制不需要校验执行结果,控制过程随着执行的结束而结束。增强型控制又分为带预置和不带预置两种类型,即增强型选择控制、增强型直接控制。普通控制也分为带预置和不带预置两种类型,即选择型控制、直接控制[2]。
4种控制方式中以增强型选择控制用得最多,主要用于对执行过程要求较高的场合,例如断路器及隔离开关遥控、保护软压板、变压器挡位升降遥控等;另外在一些要求快速执行,不要进行任何校验的场合会选用直接控制,直接对控制对象进行控制,一步执行完毕即控制结束,例如保护装置及智能终端的远程复归遥控、急停遥控等[3-4]。
1.2 遥控操作过程
通常而言,增强型选择遥控的操作一般分为3步:
1)遥控选择:主站端发出对象和性质的命令。
2)遥控返校:厂站端返送安全信息校核。
3)遥控执行:发送执行命令。
具体为:远动主站向变电站数据通信网关机发出遥控对象(开关、隔离开关、软压板或挡位)和性质(分、合或升、降)预置命令;变电站数据通信网关机收到后,经测控装置、智能终端处理向远动主站发出校核正确信息;远动主站收到正确校核信号,再与下发命令相比较,在校核无误的情况下显示“预置成功”进入下一步遥控执行程序。此时监控人员通过遥控执行命令向变电站数据通信网关机发送执行远程操作命令。遥控执行后,变电站数据通信网关机收到测控装置内设置变位信息后上传远动主站,主站在规定时间内收到该遥控对象的变位信号,则显示遥控成功,否则显示失败[5]。
智能站完整的遥控命令执行流程如图1所示。
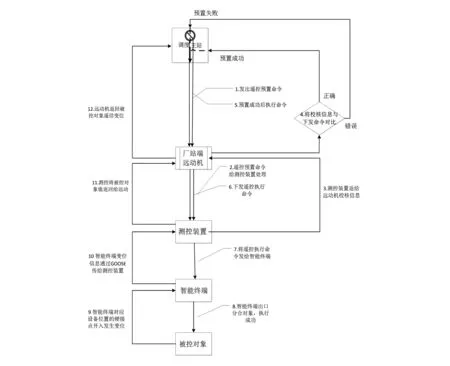
图1 智能站遥控命令执行完整流程
2 遥控故障排查与处理
2.1 观察窗定位
根据长期智能站自动化现场调试经验,发现用观察窗定位的分段验证原理排查遥控故障问题是非常有效的方法。仅针对遥控而言,利用后台监控机(主站)、测控装置和智能终端作为观察窗定位,其分别位于遥控全过程的源端、中枢和输出部分。因为所选观察窗对判断故障直接方便,因此可以快速定位故障区域并进行下一步的分段验证而最终确定故障点。
1)后台监控机(主站):观察遥控命令发出情况和遥控返校信息。
后台或主站未能发出遥控命令,则检查前置机或后台组态配置。若未能收到返校命令,主要检查数据通信网关机参数配置;若收到错误返校,主要考虑主站或后台参数配置错误,比如RTU地址错误、转发表错误等。
2)测控装置:观察遥控报告记录的遥控对象号及性质。
后台或主站是否对正确对象发出遥控命令及测控装置发出遥控命令的性质是否正确。测控装置是遥控的中枢,因此在返校正确但测控未出口的情况下应先排除测控问题。
3)智能终端:观察GOOSE异常信号和遥控信号灯。
当测控遥控GOOSE命令已正确下发,而智能终端未收到跳、合闸命令应排查链路是否异常、过程层交换机VLAN 划分正确性及SCD虚端子连线等问题。当智能终端收到GOOSE跳闸命令并且也点亮跳合闸灯但最终未正确动作,应排查智能终端出口参数和二次回路问题。
2.2 遥控故障的分段验证
根据上述观察窗定位,可将智能站遥控故障划分为5个区域。故障区域有软、硬方面配置问题,具体如表2所示。
实际工作中发现遥控故障包含了软、硬配置方面问题,而软配置故障是最难以发现和判断的。通常遥控故障归为无法遥控、遥控预置失败、遥控执行失败3类[6]。接下来根据上述3类故障重点分析故障分段验证问题。
2.2.1 无法遥控
禁止遥控:在厂站端,南瑞科技公司和南瑞继保公司的后台数据库均可取消“遥控允许”属性,并且表1所列3家公司的后台均可设置监控画面禁止遥控。但是应注意不同厂商对画面遥控权限定义不同,有的厂商规定只能在分画面遥控等情况。
无遥控权限:所有厂商均可设置无操作权限的操作员无遥控权限,或对检修的一次设备挂牌后造成无遥控权限。
2.2.2 遥控预置失败
1)“遥控预置”指令超时
①调度主站至数据通信网关机
故障点主要包括3方面:远动通道故障、主站端设备故障和数据通信网关机故障。先排查远动通道故障:当通道误码率高、通道接触不好或者通道存在干扰源,都会使主站或后台的遥控命令不能正确下发到装置。通常是检查前置通道表或前置机报文查看通道误码率。具体操作是断开厂站端RTU上传数据,检查是否有干扰信号渗入或通道中断[7]。在主站端下发一组SNTP校时命令,厂站端通道输出接口收到的数据应该与主站一致。如果不一致说明干扰信号严重,未收到数据则很可能通道已中断,再从源端即主站设备排查异常,先检查下行通道和机柜内网线是否松动或者接触不良。确认接触良好后将主站设备自环,在前置机上发SNTP网络校时。如果未收到校时数据,说
明主站设备有故障。此时应在前置机上检查参数配置,如厂站RTU地址设置两侧是否一致、TCP连接类型可能错选为TCPServer、TCP连接端口未正确设置为2404而未启动104进程[8]。
主站前置故障点集中在RTU地址错误(地址错误时可通过104规约得到一个传送原因为6E00的否定响应报文)和远动规约选择错误上。数据通信网关机可能的故障点如表3所示。
②后台监控机至测控装置
后台监控机和测控装置之间可能造成遥控预置失败的部分原因是测控装置未处于远方状态或测控有联锁逻辑闭锁。而绝大部分原因是后台监控机组态设置错误。若在站端进行遥控,可以明确的故障点如表4所示。
关于第5条故障点的说明:南瑞科技公司测控NSD3560中参数整定-装置参数-软硬压板切换设置对远方就地开入有影响,也是容易忽略的。0表示使用测控装置内的就地软压板,1表示使用外接就地硬开入压板。当错误整定为0,但测控未投就地软压板控制字会导致预置失败,后台会显示返回值2。
关于第10条故障点的说明:北京四方公司和南瑞继保公司后台如果将遥控类型设置为无效,那么后台可以执行但是测控装置不会收到遥控预置信息。
3 遥控执行失败
3.1 同期参数整定错误
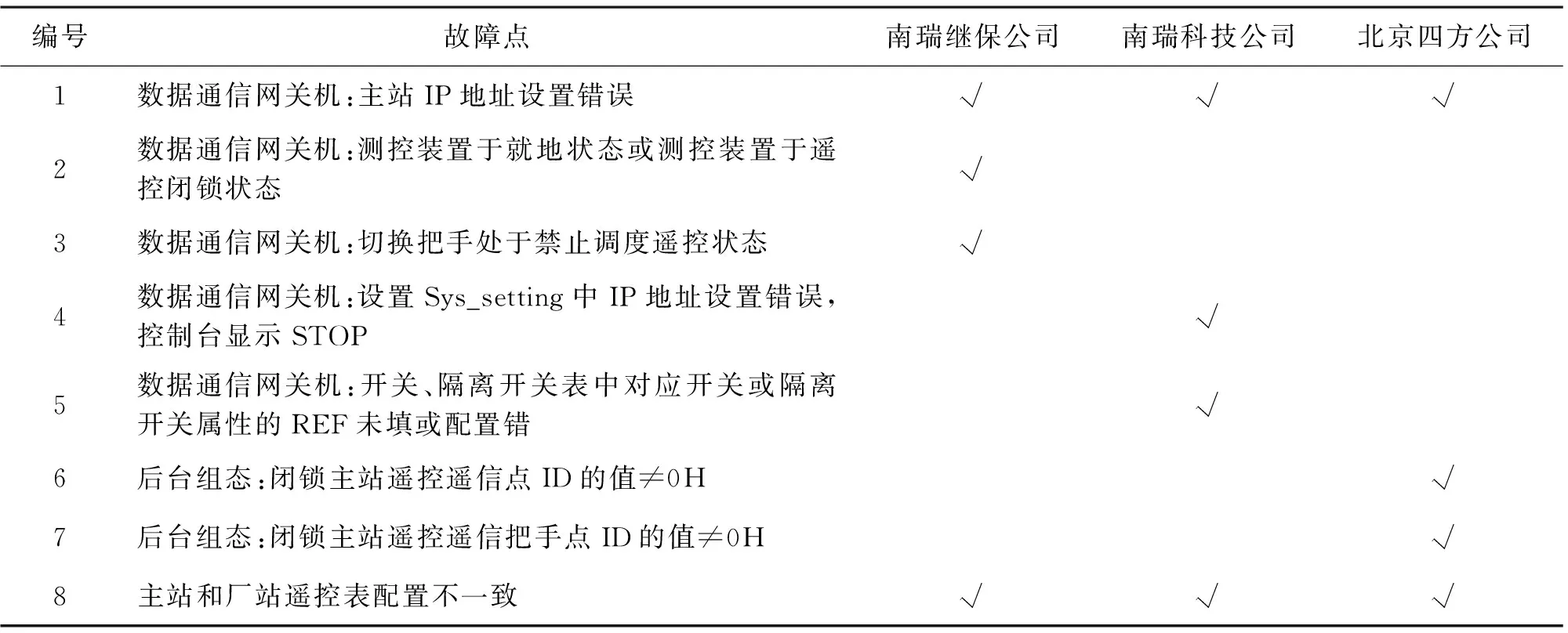
表3 主站遥控预置失败关于数据通信网关机设置
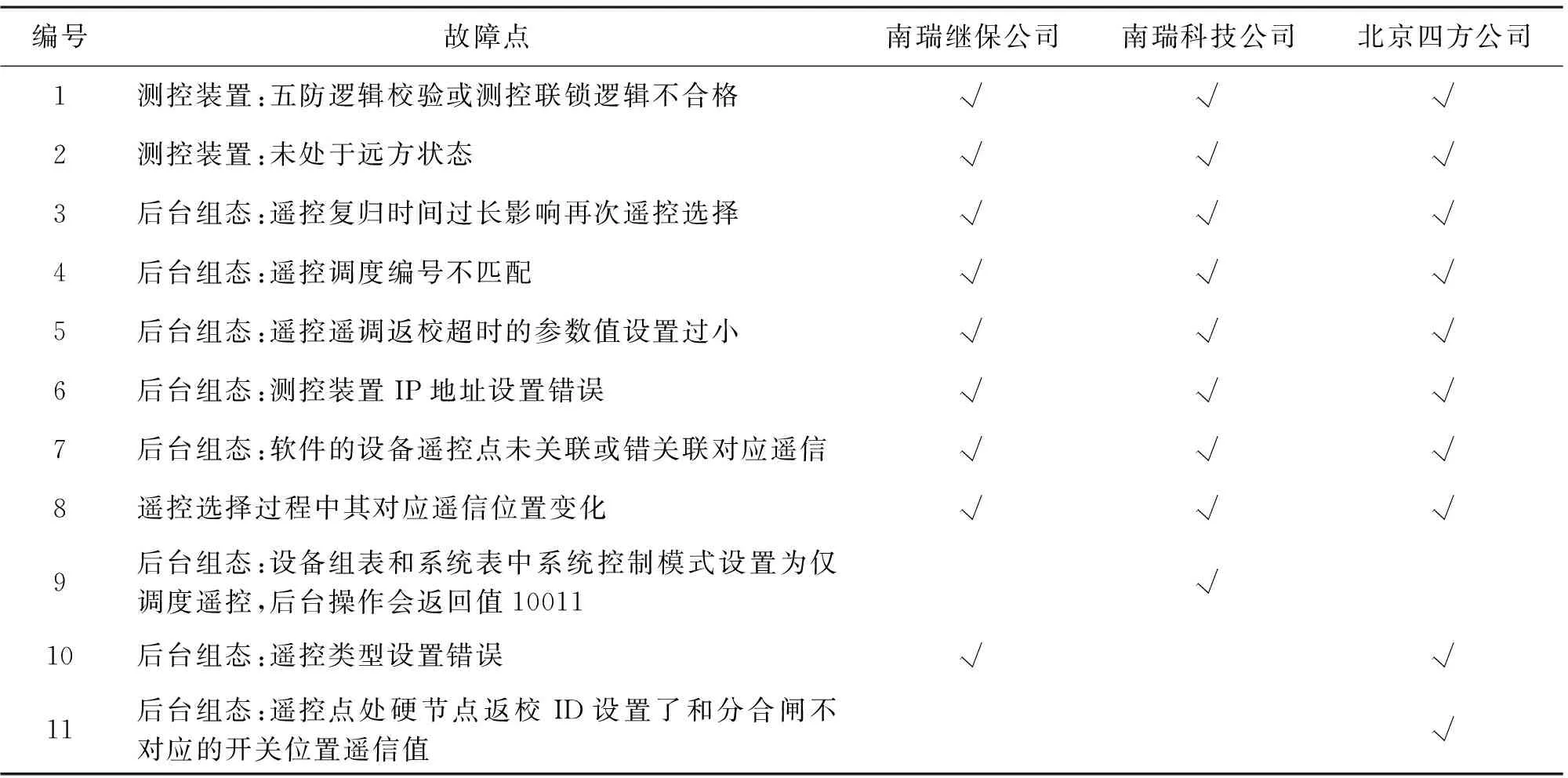
表4 厂站遥控预置失败关于后台或测控装置故障点
同期条件不满足也是220 kV变电站遥控合闸的重要问题。主要故障点是测控装置的定值整定不正确导致条件不满足闭锁同期合闸。通过现场调试和研读说明书总结出同期参数不正确导致遥控失败的故障点如表5所示。
关于第1条故障点的说明:同期电压类型必须和同期额定电压保持一致。不同厂家表示同期电压类型的方式不同:南瑞继保公司用0~5分别表示UA、UB、UC、UAB、UBC、UCA;北京四方公司要求先投入检同期功能软压板后才能在同期控制字中选择需要同期的电压类型。南瑞科技公司测控装置具有相角补偿功能,当装置输入的电压Ua和Usa不是同名电压,存在固有相角时,可以进行相角补偿。同期定值参数中具有定值“相角补偿使能”和“相角补偿时钟数”。“角度补偿钟点数”是当开关合上后,开关两侧输入电压向量角度即是需要补偿的角度。
关于第2条故障点的说明:南瑞继保公司和北京四方公司采用的同期TV电压是一次额定值,而南瑞科技公司定值判定采用二次值。因此应特别注意要根据下达的二次定值单和现场实际装置定值要求进行转换。
关于第3条故障点的说明:同期条件不合格包含诸多方面,如频差、电压差、相差、同期导前时间整定错误、母线TV断线、交换机开启多播限制等。其中关于交换机的多播限制,因SV和GOOSE传输均采用组播MAC传输,而当交换机开启组播限制后,SV会出现丢帧、GOOSE出现时通时断现象。当出现丢帧时也会造成同期条件不合格而闭锁遥控。
关于第4条故障点的说明:南瑞继保公司测控装置未投入SV接收压板时,后台及测控装置均能正确显示采样值,但UX并不纳入同期值计算而造成同期压差、角差值不满足条件。这3家测控设备也仅有南瑞继保公司装置有SV接收压板。
关于第5条故障点的说明:北京四方公司测控装置在考虑3/2接线时同期电压采用近区优先原则,因此可投入非固定同期方式压板满足要求。当抽取同期电压只有1路时,应投入固定方式压板。
3.2 智能终端未收到分合闸命令
3.2.1 测控装置-智能终端之间
通过测控装置与智能终端两个观察窗可以很容易地分析出故障区域,此时故障现象是智能终端未收到分合闸命令,因此除了物理链路中断外只有测控装置GOOSE未发出或智能终端接收GOOSE出现故障两种可能。现列举故障点如表6所示。
关于第5条故障点的说明:南瑞科技公司测控装置收到自动合闸判断命令后,将按照装置同期定值参数中的“自动合闸方式”参数设置进行合闸操作。如果其为0,则为自动判断方式,装置根据断路器两侧电压情况自动进行合闸方式判断;如果参数为1,则只进行无压合闸操作,如果不满足无压条件则不进行合闸;如果参数为2,则只进行有压合闸操作,不满足条件不合闸;如果参数为3,则进行无条件合闸操作。因此当自动合闸方式整定和实际不一致,测控也无法出口。
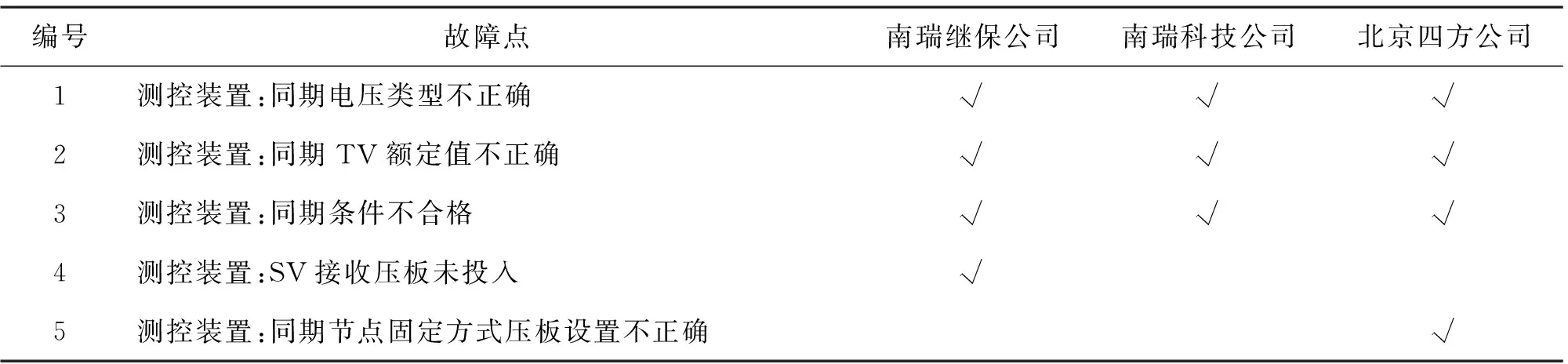
表5 遥控执行失败关于测控的同期参数整定原因
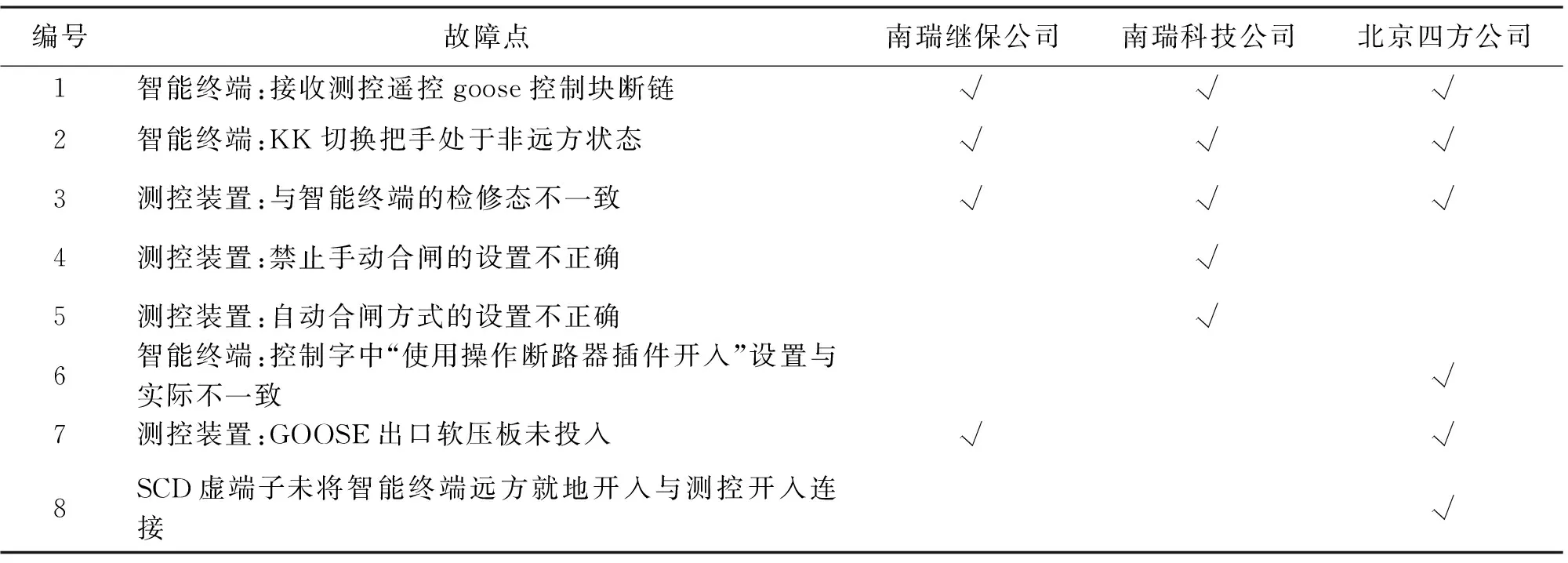
表6 厂站遥控预置失败关于测控装置与智能终端的故障点
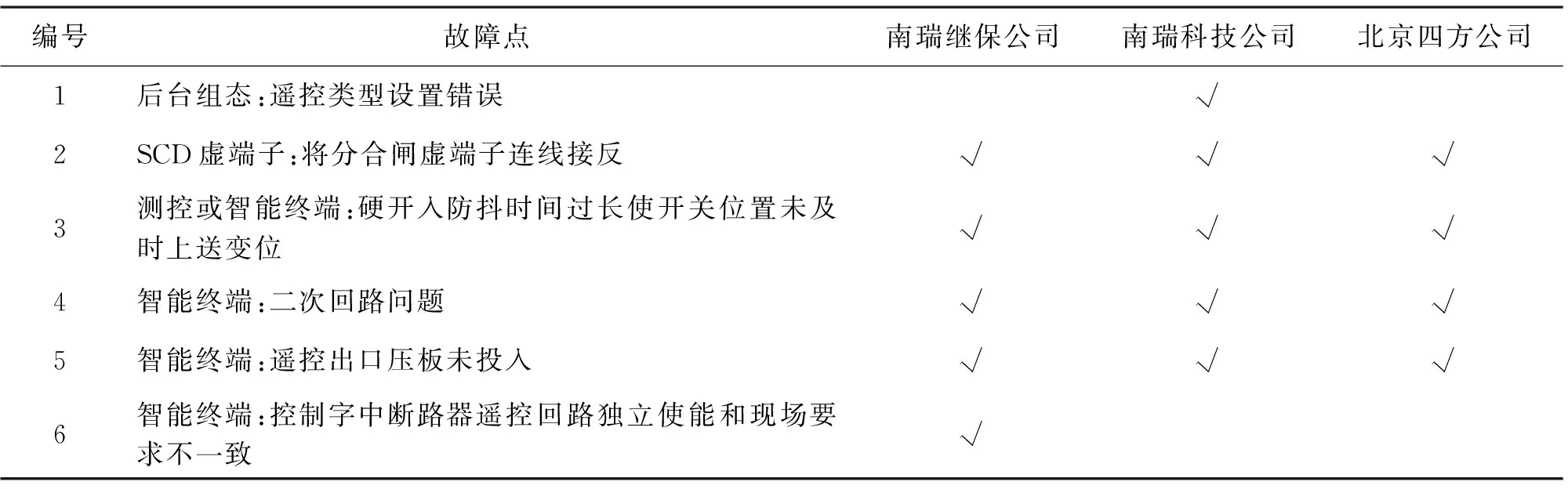
表7 智能终端收到跳合闸命令但未出口的故障点
关于第6条故障点的说明:使用操作断路器插件开入设为1时,三相断路器总位置开入应由硬接线合成;否则,应由智能终端的逻辑合成。
关于第7条故障点的说明:南瑞继保公司对GOOSE出口软压板定义为出口使能软压板,北京四方公司定义为控制逻辑软压板,而南瑞科技公司测控装置没有设置GOOSE出口压板。
最后第8条故障点的说明:北京四方公司测控装置PLC程序写入遥控包含远方开入规则。因此,必须确保SCD中将智能终端的远方就地切换把手开入关联至测控GOOSE开入89,并且把手处于远方状态,遥控预置成功后才能出口。
3.2.2 数据通信网关机设置
目前发现南瑞科技公司在数据通信网关机进行配置时可能遇到如下故障导致遥控失败,具体是在数据通信网关机的远动程序frcfg中的通讯配置模块下存在无任何配置的空节点。这个故障点很隐蔽,也难以查出。
3.3 智能终端收到命令但未出口
通过观察窗发现智能终端能收到分合闸命令(观察遥控分合闸灯) 时但并未出口或出口不正确时,主要故障点还是在智能终端。具体故障点如表7所示。
关于第1条故障点的说明:南瑞科技公司后台组态中如果将1072开关、隔离开关表的“一直控分(一直控合)”使能,那么无论开关位置处于什么位置、无论进行的是分闸或合闸操作,最后都只会出口分闸(合闸)命令。
关于第3条故障点的说明:智能终端二次回路故障点众多,最常见故障有断路器控制回路断线;智能终端遥信正、负电源配线虚接、移位;因断路器遥控后抖动使智能终端背板产生松动;智能终端压板背板线被误短接;遥控分合闸出口线错接等。对运行设备查二次回路主要使用万用表测量电位,结合图纸判断正确电位法;对新建站主要采用短接正电至跳合闸出口回路,通过听继电器动作声或实际出口情况判断故障区域。
关于第5条故障点的说明:南瑞继保公司智能终端中参数“断路器遥控回路独立使能”定值为0时,遥控、手动分合与保护跳闸、重合闸共用出口接点;定值为1时遥合、手合接点采用B12板的备用1遥合接点,并且需外加一个重动继电器才能实现。如果设计单位未对遥控节点再配置重动继电器,那么在线路新投时应注意此定值参数的设置。
4 结 语
通过遥控故障的观察窗定位及异常处理具体分析,归纳出如图2所示的遥控过程观察窗及分段验证的信息流。针对不同故障现象,可以根据观察窗所得现象分析出故障区域,再进行分段验证。现场可根据所总结的可能故障点进行逐一验证。虽然目前不同厂商的自动化设备有很多具体的参数设置,相信随着国家电网公司对自动化设备“四统一、四规范”要求的提出和实施,不同厂商遥控故障差异性设置问题会逐渐减少,真正利于智能站自动化维护。
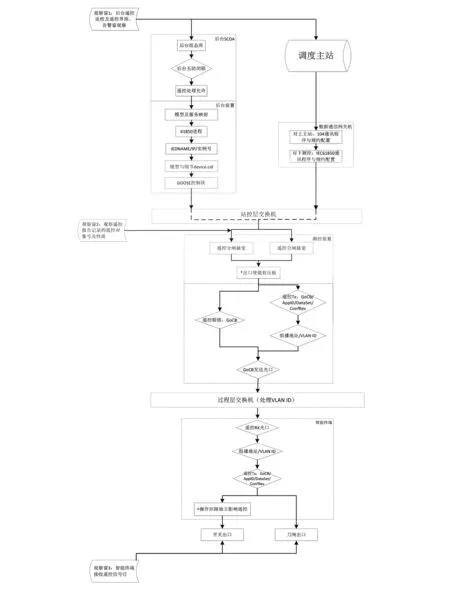
图2 结合观察窗的遥控故障分析图信息流
综上所述,围绕智能变电站遥控故障的角度详细阐述了分析过程。针对3家主流厂商自动化设备进行了对比,总结出遥控故障过程的3个观察窗和分段验证思路。如今,智能变电站的大量新技术应用已使原有调试、运行和维护模式产生了重大变化,因此试图用观察窗定位、分段验证及差异性总结对智能变电站自动化异常处理进行一次探索,形成良好智能站的自动化维护思路。
[1] 汪娟华,叶钟海. 一起电网调度遥控操作失败故障的分析与处理[J]. 江西电力, 2014,38(2): 61-62.
[2] 李雨舒,李明珍. 无人值班变电站遥控常见故障的分析与处理[J]. 电力系统保护与控制, 2009,37(18): 145-146.
[3] 王旭东,梁栋,曹宝夷,等. 三遥配电自动化终端的优化配置[J]. 电力系统及其自动化学报, 2016,28(2): 36-42.
[4] 张曦,黄飞,刘志宏,等. 配电自动化三遥功能闭环测试方法及其应用[J]. 2016,33(6):2-6.
[5] 周随江. 集中监控遥控遥调异常的分析[J]. 低碳世界, 2016(13):26-27.
[6] 韩国政,徐丙垠,索南加乐,等. 基于IEC 61850的配网自动化通信技术研究[J]. 电力系统保护与控制, 2013,41(2): 62-66.
[7] 许伟国. 110 kV智能变电站自动化系统关键技术应用研究[J]. 供用电, 2011,28(5): 40-45.
[8] 张大伟. 104规约在成都电网调度自动化系统中的运用分析[J]. 四川电力技术, 2013,36(3): 49-51.
In order to improve the quality and efficiency of automatic maintenance of smart substation, the observation window positioning method for remote control fault is proposed based on the whole process of remote control fault analysis from mainstream automation equipment manufacturer. Moreover, the similarities and differences of each stage are summarized, and a set of solution and analysis process is put forward for remote control fault analysis of smart substation based on IEC 60870-5-104. Finally, the observation points and processing analysis process for remote control fault are clearly defined through the flow chart. The above-mentioned can help the maintainers of secondary system to have a better understanding in every segment of remote control when facing the frequently updated specifications and technical requirements and a large number of automation maintenance works of smart station.
smart substation; remote control; fault analysis; observation window positioning; domain-verifiable; Telecontrol Equipment and Systems-Part 5-104
TM76
B
1003-6954(2017)06-0068-08
李 游(1986),硕士研究生、工程师,研究方向为智能变电站二次系统及自动化。
2017-09-12)
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05 07:29:28
橡塑技术与装备(2022年12期)2022-12-12 06:42:28
数字海洋与水下攻防(2020年5期)2021-01-04 01:40:06
电子测试(2018年22期)2018-12-19 05:12:56
电子设计工程(2017年20期)2017-02-10 03:39:04
电子制作(2017年23期)2017-02-02 07:17:07
焊接(2016年8期)2016-02-27 13:05:12
郑州大学学报(医学版)(2015年2期)2015-02-27 14:50:56
郑州大学学报(医学版)(2015年2期)2015-02-27 14:50:56
云南电力技术(2014年1期)2014-06-23 02:44:12