太阳能电池驱动的检测小车设计
2018-01-03 05:46:11徐红运徐小力吴国新
设备管理与维修 2017年12期
徐红运,徐小力,吴国新
(北京信息科技大学现代测控教育部重点实验室,北京 100192)
太阳能电池驱动的检测小车设计
徐红运,徐小力,吴国新
(北京信息科技大学现代测控教育部重点实验室,北京 100192)
以检测农场墙体裂缝为背景设计并制作一辆以太阳能为能源驱动的检测小车,用来对农场墙体裂缝进行拍照处理,达到预防避免因墙体坍塌对农场带来损失的目的。利用WiFi机器人的原理,通过WiFi上位机传达指令,控制下位机,使车体运动,获得对象图像,并对对象内容进行分析处理。检测小车可用来对裂缝在图像中所占比例及面积进行处理,计算出在一定的范围内裂缝占整个界面的比例。
太阳能;驱动;检测;控制;WiFi
10.16621/j.cnki.issn1001-0599.2017.12.28
0 引言
柴油和汽油这些不可再生能源总有一天是要被消耗完的,因此“绿色能源”成为各国争相发展的主题。同时伴随着人们对工作环境的要求以及自动化程度的提高,基于现实需求太阳能电池驱动的检测小车应运而生,它弥补了动力采用汽油或柴油机,容易造成污染,不方便携带的不足,代替了传统的人工检测,解放了劳动生产力,也大大节省了资源。
随着经济的发展,国内的农场发展规模越来越大,因此所需要的墙体范围也不断加大。芳草湖总场坐落在古尔班通古特沙漠西南缘,南北长53 km,东西宽38 km,目前为中国最大的农场。在这么大的范围内,如果单靠人去巡视墙体的完整损坏情况,会消耗很大的人力物力。但如果农场减少这方面的投资,当某一部分墙体由于温度等原因损坏严重,任由情况不断恶化,那么当体型较大的动物(如牛)稍微冲撞一下,极有可能导致墙体坍塌,动物跑出,或者墙体向内坍塌,造成部分动物死亡,都会给农场带来很大的损失,如果动物跑出,那么对生态环境也会造成一定危害。因此在设计小车时要考虑到保护环境,不浪费人力物力,降低成本等因素。
本文设计的小车是依托太阳能电池给电机驱动模块提供电能驱动电机,进而实现检测小车运动。通过WiFi信道的控制电机,实现小车运动,控制舵机,实现摄像头的转动,对想提取的内容进行拍照处理。小车制作完成之后,从一处出发,在规定时间内对墙体进行拍照,在处理图像时,根据国家建筑物裂缝危险标准,对图像中的裂缝进行处理,计算面积比例计算,与国家标准进行对比,若高于标准,则需要进行加固修缮处理。自定义标准:当裂缝面积比例>0.005时,则判定不合格,需要对墙面修复处理。
1 太阳能小车总体设计
依托太阳能电池的采光、集电,储存电能,提供给电机驱动模块驱动电机,进而实现检测小车运动。这一过程是由主机控制器控制实现的,图1为太阳能电池驱动电机原理。设计过程中需要完成太阳能电池驱动的检测小车的硬件部分。太阳能检测小车应用太阳能电池板收集到的太阳能转换成电能给其他工作系统来获得电能,以单片机为控制中心,硬件包括太阳能电池板、蓄电池、电机、控制电路板、底盘部件。
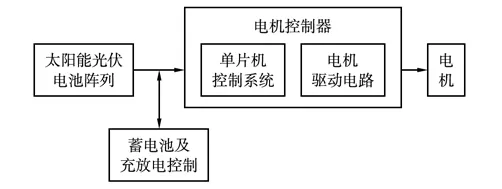
图1 太阳能电池驱动电机原理
1.1 太阳能小车硬件部分
(1)小车底盘和车轮。四轮驱动的小车适合在起伏不平的地面行使,这种平台的顶板面积比较大,可以用来搭载小件物体。小车在运行过程中要比较稳,其底盘不能太高,底盘上要放蓄电池,控制电路板,舵机和摄像头等部件,体积不能太大,可以基本满足在平地上实现功能。自带波纹过滤的车轮可防止干扰单片机。
(2)驱动电机。为使小车可以正常检测货物前进,并根据小车所需速度需要配备电机驱动控制小车的行进速度。直流电机扭矩小,转速高,用于机器人控制时,需增加相应的减速装置来增加其力矩及降低转度。具有代表性的机器人常用电机(带减速装置),其工作电压为3~12 V(建议工作电压为6~9 V),减速比为1∶48,有双端出轴和单端出轴,性价比相对较高,非常适合用作智能车、微型机器人等的驱动部件。减速电机可以将电机与车轮直接相连,固定在地盘下面。用于摄像头处的舵机在某一个角度范围内转动,小型舵机的工作电压一般为4.8 V或6 V,转速一般在0.22 s/60°~0.13 s/60°,速度更快的可达到 0.09 s/60°。mg995 的转动角度为180°,工作电压为5 V,采用PPM角度控制原理。
(3)电机驱动器。驱动芯片L298电机驱动板支持标准的TTL逻辑电平信号VSS VSS可以连接到4.5~7 V电压。L298N驱动直流电机时,引脚分别接输入控制电平,达到控制电机顺逆时针旋转的目的,再连接接控制使能端,分别控制电机的使用和停止。Ardunio Uno板与L298板子叠放在一起采用PWM速度控制原理达到控制汽车电机的目的。摄像头在舵机云台的带动下,都周围的环境对象进行拍摄,拍照,提取图像,传输回电脑控制端。
(4)太阳能电池板、控制器、蓄电池。太阳能电池板需要考虑到稳压、成本和灵敏性问题。单晶硅光伏电池作为能量来源,串联达到所需电压,并联达到所需电流,最终电池板收集的电能可供小车驱动。控制器是将太阳能板发出的电能存入蓄电池的一种设备。蓄电池要与控制器及太阳能板的功率相匹配。
(5)Arduino作为控制核心,WiFi控制摄像头进行拍照,摄像,将结果存储在计算机中,便于进行文件调用,进行分析处理。WiFi转串口模块可直接兼容Arduino Uno板。该模块使用了HLK-RM04核心板,并增加了Arduino Uno板的引脚功能,可以直接插在Arduino Uno等多个型号的开发板上使用。
1.2 小车的控制原理
电脑控制端通过WiFi信道将指令传递给WiFi控制模块,再由串口传递给电机驱动模块,在控制电机。同时电机驱动模块也可将信息反传递回WiFi控制模块,再由WiFi信道传递给电脑控制端。电机控制原理图如图2所示。小车摄像头将视频图片通过USB数据线传递个WiFi控制模块,再通过WiFi信道传递给电脑控制端进行保存处理。WiFi小车视频传输原理如图3所示。
2 控制系统软件程序设计
在小车的控制系统中包括3部分,第一部分是下位机程序,是应用于电机驱动模块的程序,主要是控制电机及舵机的动作程序,第二部分为上位机控制程序,主要是发送指令给下位机,第三部分为图像处理程序,用来最终处理图像,得出结论。3部分程序分别如下。
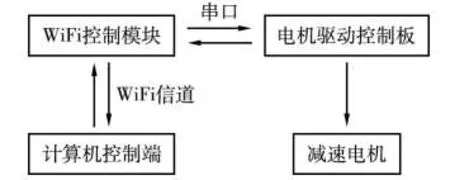
图2 小车指令传输原理

图3 WiFi小车视频传输原理
2.1 驱动电机控制程序
驱动电机控制程序应用于在Arduino板子中,服从上位机的指令,驱动小车运动。用单片机L298,直接赋值各个引脚I/O口电平的高低来定义电机运动方向,创建两个舵机,在Setup函数里设置各个引脚的输入输出属性,并在For函数里设置闪灯的延迟,WiFi模块启动完毕。将串口波特率设置为9600 bps,定义两个电机,Get-uartdata函数死循环读取串口数据。Get-uartdata函数执行操作判断串口数据是否有数据包,数据包是否正确。对收到的数据包进行解析。最后判断类型,具体动作。电机控制程序中包含有舵机控制程序,下位机支持云台默认角度的校准,当系统启动云台转动角度不正确时,可将正确角度记忆,下次启动时则可确保转动角度正确。同时,在采取图象时,对图像进行分析处理,可对可疑图像拍摄角度进行记忆,方便找回可疑图像拍摄角度。
2.2WiFi控制程序
WiFi控制程序称为上位机,是发出指令端,通过上位机给下位机指令,完成交代的命令。 图4为上位机的源代码基本架构,分别是视觉识别、视频解码和WiFirobot主要工程3部分。最主要的是WiFirobot源代码程序列表(图5)。
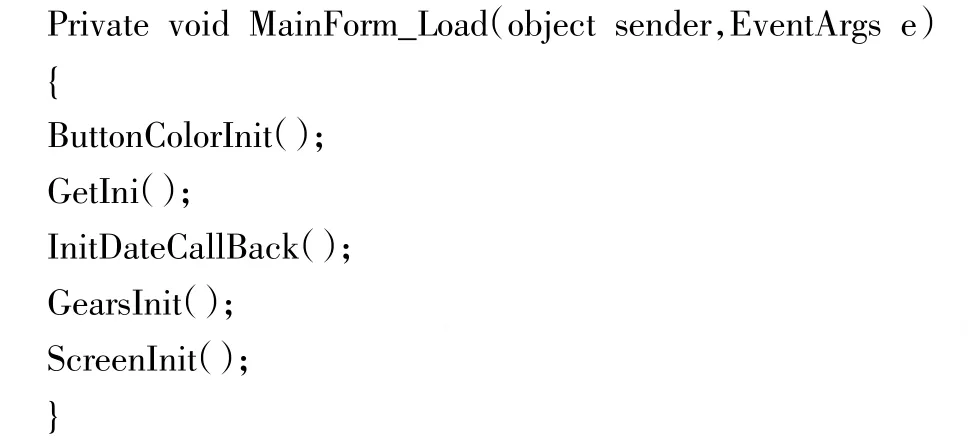
主要程序流程见图6,程序主函数如下。
2.3 图像处理程序
此次图像处理是对检测小车摄像头拍到的照片进行简单的分析处理,最后人为地对处理结果进行合理应用。在测试过程中,计算机对拍到的图像进行黑白部分处理分析,即出现原图像,二值图,二值图处理,计算出图像面积,黑色区域面积,黑色区域比例,分析比对,得出结果。
3 小车的工作控制方式
3.1 小车控制方式
通过以上的设计,组装,编程,整个小车工作方式见图7。由计算机主机发出指令,通过WiFi信道发送出指令给驱动模块上的单片机,进而驱动模块驱动电机运动,小车可以完成像常用汽车一样前进、后退和左右转弯的功能。只需要控制改变小车车轮的旋转速度及方向。再由WiFi模块控制舵机云台转动,进而控制摄像头得到视频图像。

图4 源代码基本架构

图5 WiFirobot源代码程序架构
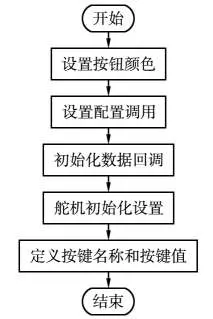
图6 主要程序流程
(1)当开启小车电源时,在控制模式中选取WiFi控制方式,将计算机与小车通过WiFi连接在一起,则可通过在操作平台界面给出指令使小车做出相应的运动。比如,当点击舵机控制的滑动条时,舵机云台进行相应角度的转动。
(2)小车运动开始时,当左右两个车轮的速度一样时,左右车轮向前,小车前进。仅左轮转动,右轮不转或速度小于左轮速度时,小车向右转。左右车轮反转,小车后退。左轮向前转,右轮向后转,小车顺时针旋转。
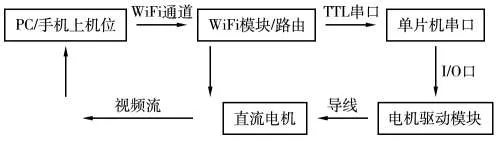
图7 小车工作控制方式
3.2 图像分析处理
设置检测小车在距离墙体2 m的地方对墙体拍照,所拍摄的面积大约为4 m2。根据国家建筑物标准规定。在高度为2 m的墙体中,裂缝长度不能高于500mm,墙中间部位产生≥4.5mm的裂缝时,则为危险墙体危险,则面积不能超过2250mm2。对应型号为A8050的摄像头,根据换算,则当像素总个数超过72 000的时候,墙体有危险,需要加固修缮。当摄像头拍摄到如图8所示图像时,即可以应用图像分析系统对图像进行分析处理。
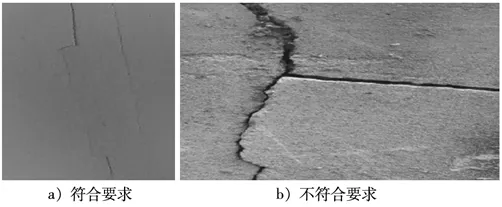
图8 原图像
处理结果见图9,图9a中裂缝面积比例<0.005,则不需要进行修复,但图9b中裂缝面积比例为0.028 494 4,>0.005,则需要恢复处理(面积以像素总个数为单位)。最后对所有图片进行汇总处理,整理成报告,由农场维修人员进行处理。
4 总结
根据需求利用机器人智能小车的设计方案设计一辆小型的太阳能检测小车,完成一系列的运动指令,用来对农场墙体裂缝进行拍照处理。依托太阳能电池提供电能给电机驱动模块驱动电机,进而实现检测小车运动。过程中需要完成太阳能电池驱动的检测小车的硬件部分和程序部分,最终进行小车的装配与程序调试。小车制作完成之后对墙体进行拍照,对图像中的裂缝进行处理,计算面积比例,这对防止事故发生以及减少人力物力有重要意义。
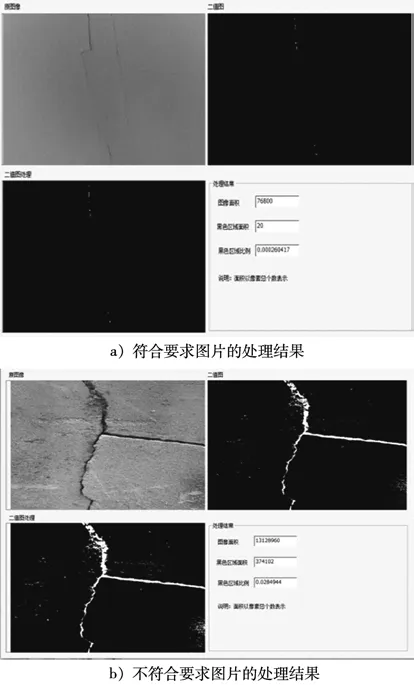
图9 处理后图像
[1]李宇锋,喻暘,谭达,陈刚.基于Atemga128太阳能智能小车充电系统的研制[J].科研发展,2014(1):73-74.
[2]郭夕琴,丁荣乐,王志斌.半自动搬运机器人小车的运动控制[J].产品研发,2010(3):43-44.
[3]吴基安,吴洋.新能源汽车知识读本[M].北京:人民邮电出版社,2009.
[4]徐开芸,韦树成,汪木兰,丁左武.基于AVR单片机的太阳能智能小车控制系统设计[J].测试与控制,2010(1):141-143.
[5]林少帅,谢勇,赵齐齐,郭志波.基于Atmega16的太阳能智能小车[J].科技视界,2012(4):6-7,5.
[6]揭宗昌,蔡泽辉,王鹏.简易自动仓储搬运小车的设计与实现[J].软件工程与技术,2010(11):12-16.
[7]曾歆妍.基于单片机的太阳能智能搬运车队的设计[J].新能源技术行业应用,2011(8):69-72.
[8]邱鑫,肖福荣.基于AT89C 51单片机的太阳能导航小车队的设计[J].科技广场,2014(5):83-85.
[9]史玉茜.绿色环保汽车-太阳能汽车[J].节能技术,2009(1):78-82.
[10]李穹,阮大伟,胡婵,张清勇.基于单片机的太阳能光电导航搬运车[J].可编程控制器与工厂自动化,2011(8):107-109,116.
TM914.4
B
〔编辑 凌 瑞〕
猜你喜欢
工程建设与设计(2021年11期)2021-07-28 06:32:40
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
自动化学报(2019年6期)2019-07-23 01:18:36
文苑(2018年22期)2018-11-19 02:54:18
西南交通大学学报(2018年5期)2018-11-08 10:58:46
上海建材(2018年2期)2018-06-26 08:50:54
电子制作(2018年8期)2018-06-26 06:43:02
电子制作(2018年1期)2018-04-04 01:48:14
制造业自动化(2017年2期)2017-03-20 14:26:08