
电液负载模拟器同步结构解耦研究
2017-12-29 03:16李阁强韩伟锋邓效忠
中国机械工程 2017年24期
李阁强 刘 威 韩伟锋 邓效忠
1.河南科技大学机电工程学院,洛阳,4710032.盾构及掘进技术国家重点实验室,郑州,4500013.机械装备先进制造河南省协同创新中心,洛阳,471003
电液负载模拟器同步结构解耦研究
李阁强1,3刘 威1韩伟锋2邓效忠1,3
1.河南科技大学机电工程学院,洛阳,4710032.盾构及掘进技术国家重点实验室,郑州,4500013.机械装备先进制造河南省协同创新中心,洛阳,471003
针对电液负载模拟器中的多余力矩问题,以阀控摆动马达电液负载模拟器为对象,在分析研究多余力矩产生机理及影响因素的基础上,提出一种同步结构解耦新方法,具体实现是将加载执行元件设计成复式双层结构,外层同步马达用于跟踪承载对象进行位置同步控制,内层马达用于加载,通过复式结构加载执行元件实现变被动加载为主动加载,从根本上解决了多余力矩问题。给出了复式摆动马达的参数匹配原则、密封及结构设计方案,仿真分析了内外层马达油道配流方式的合理性。最后,通过小梯度加载下电液负载模拟器性能的仿真分析验证了同步结构解耦新方法的正确性及有效性。
电液负载模拟器;多余力矩;同步结构解耦;复式摆动马达
0 引言
电液负载模拟器(electro-hydraulic load simulator,EHLS)属于被动式电液伺服加载系统,常用于国防尖端技术领域的载荷试验,如地面半实物模拟导弹等飞行器舵机的空气动力铰链力矩[1]。电液负载模拟器上存在的多余力矩特性,以及承载对象不确定的特点使其成为极难控制的伺服系统[2]。对于多余力矩,国内外学者提出了很多解决办法,概括起来分为两大类:一类是结构抑制方法;另一类是控制补偿方法。结构抑制方法是通过增大液压或机械结构的滤波作用来抑制多余力矩的影响程度,包括双阀控制方案、蓄压器校正、缓冲弹簧校正、连通孔缓冲、位置同步补偿方案以及压力阀控制[3-7]等。其中双阀控制方案采用压力伺服阀加载,流量伺服阀补偿强迫流量,但最终还是作用在同一个执行马达上;连通孔方案能在一定程度上缓冲强迫流量;位置同步补偿是在加载马达和基座之间引入一个位置马达来吸收强迫流量,但其分布式结构特点增加了加载马达的制造难度,占用空间大,降低了系统整体固有频率,并且在模拟仿真中存在安全隐患;压力阀控制通过输出压力与控制信号严格的比例关系实现加载。控制补偿方法主要通过控制算法来实现对多余力矩的抑制,如采用多变量解耦控制策略,将整个系统看成是多变量系统,引入解耦控制器,适当选择解耦控制器参数抑制多余力矩[8-11];基于结构不变性原理,通过对加载对象的速度信号进行反馈来达到减小多余力矩的目的[12-14];采用复合控制方法,通过不同控制策略的结合,实现优势互补[15-17]。上述各种控制补偿方法,本质都是将承载对象运动作为干扰来处理,根据运动状态补偿其引起的多余力矩,但由于多余力矩具有高通特性和微分特性,随着仿真频率的提高,补偿网络往往含有高阶微分环节,这在物理上是难以实现的,而且易受高频噪声的干扰,且补偿方法依赖于精确的数学模型,因此一般仅能实现近似补偿。
本文从加载执行元件入手,提出一种复式结构摆动马达[18],从加载原理上实现变被动加载为主动加载,从根本上解决多余力矩问题。
1 电液负载模拟器工作原理及多余力矩产生机理分析
电液负载模拟器的工作原理如图1所示。图1中左侧为加载系统,右侧为承载系统。承载马达带动加载马达运动,加载马达的强迫运动导致内部流量变化,进而影响加载马达输出力矩,加载马达输出力矩作用在承载系统上,造成承载系统的运动状态发生改变,承载系统运动状态和加载系统输出力矩如此反复影响,相互作用。为保证加载系统的加载性能,必须有效抑制两者之间的多余力矩作用。

图1 电液负载模拟器工作原理图Fig.1 Operational principle diagram of EHLS

图2 电液负载模拟器数学模型Fig.2 Mathematical model of EHLS
由图1建立负载模拟器数学模型[19],如图2所示。图2中,θr是承载系统和加载系统的输入信号,θl是承载系统的输出位置信号,T是加载系统的输出力矩信号,其余符号含义如表1所示。表1也相应地给出了本课题组研制的电液负载模拟器试验台相关参数值。
由图2可见,承载系统的位置输出θl以干扰流量的形式通过耦合通道对加载系统输出构成多余力矩,同时加载系统的输出力矩T通过力矩耦合通道对承载系统的输出构成耦合位移,将伺服阀看作比例环节,可得多余力矩T0的表达式如下:

表1 电液负载模拟器仿真实验参数

(1)
由式(1)可知,多余力矩的主要影响因素是马达角速度sθl、连接刚度G、加载马达排量Dm以及加载马达总流量压力系数Kce。其中最大的影响因素是马达角速度,因为仿真要求马达角速度的变化范围很大,所以多余力矩相应地成比例变化。这个影响规律从实验上也可以得到验证,图3是本实验室研制的电液负载模拟器试验台。为了验证承载系统运动速度对多余力矩的影响,将加载系统指令信号置零,承载系统施加指令位置信号,通过扭矩传感器检测加载系统输出力矩,此时加载系统输出力矩为多余力矩,如图4所示。由图4可知,多余力矩随着承载系统运动速度ω的增大而增大。

图3 电液负载模拟器仿真试验台Fig.3 Simulation test-bed of EHLS
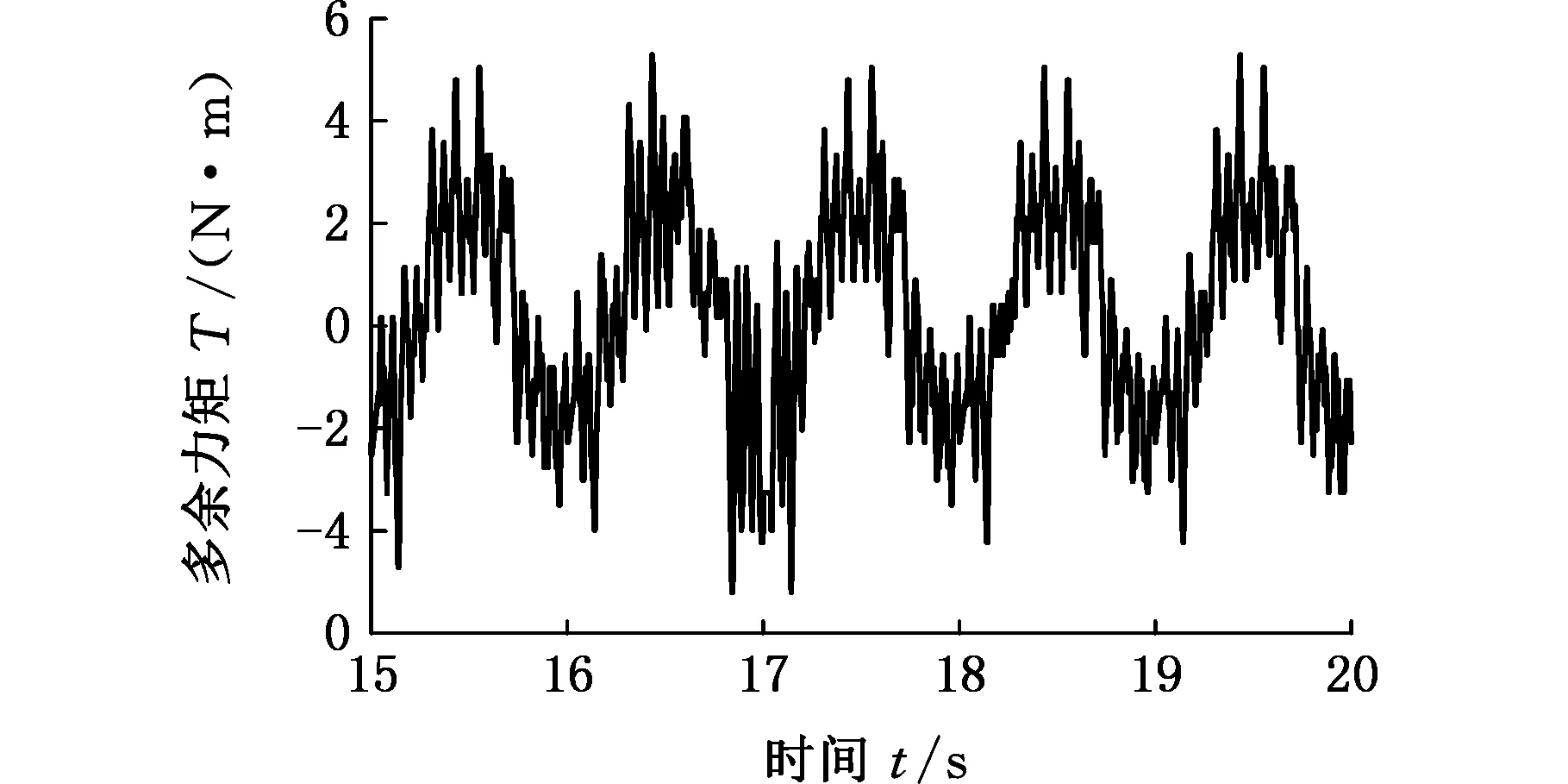
(a)ωmax=6.28°/s

(b)ωmax=62.8°/s
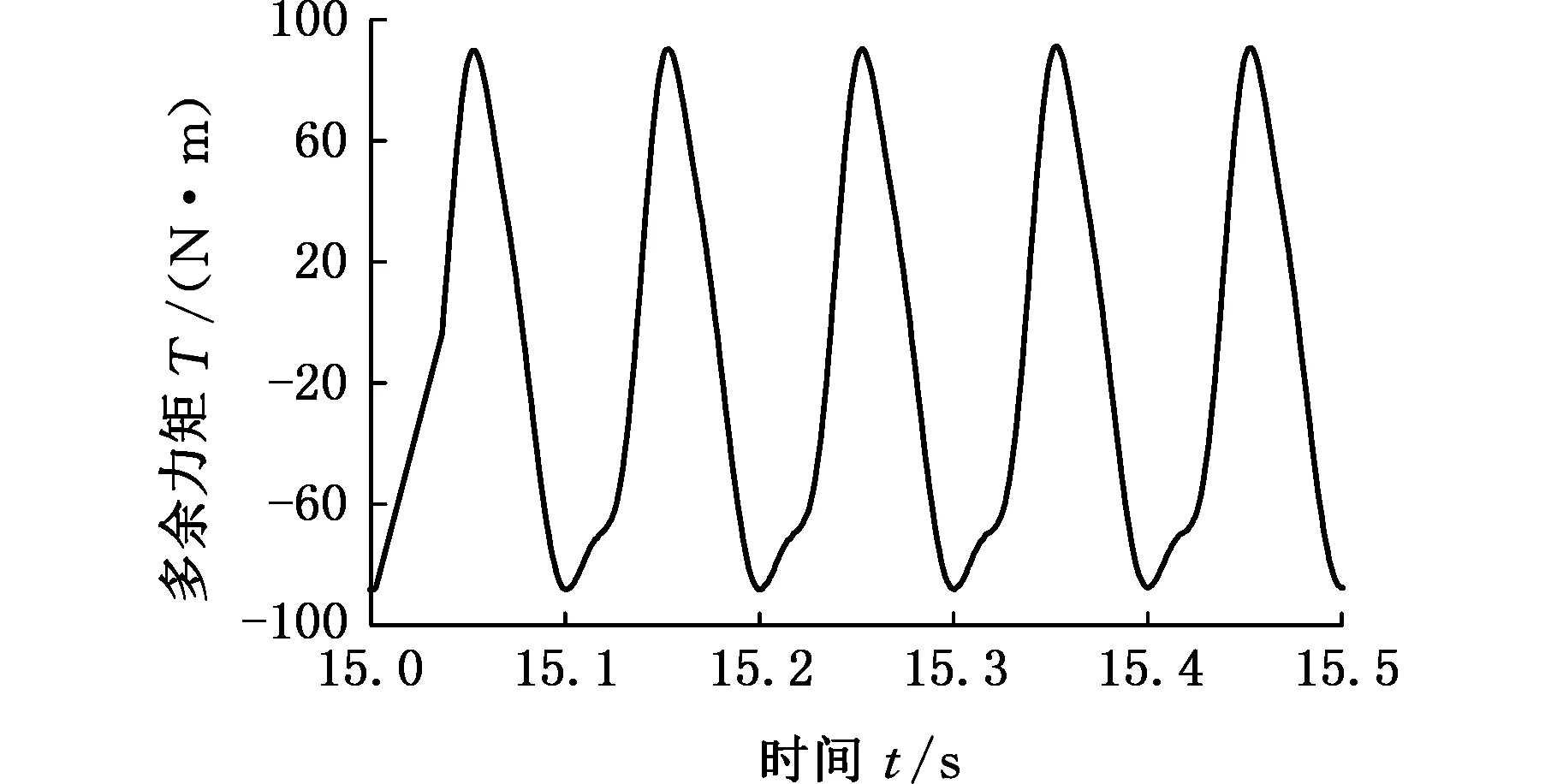
(c)ωmax=251.2°/s图4 承载系统不同速度时对多余力矩的影响Fig.4 The influence of different speed of the bearing system on coupling torque
2 同步结构解耦原理
通过上述分析可以看出,承载系统的主动运动和加载系统的滞后是多余力矩存在的根本原因,使得加载系统中流量和压力之间也存在着一定的耦合关系。单纯地通过控制补偿方法很难从根本上解决多余力矩问题,必须从结构上找到根本的抑制方法。由图1和式(1)均可以看出,如果加载马达能同时既跟随承载马达的运动,又能对承载马达进行加载,就可以抵消掉承载马达的速度干扰。为此,将图1中的加载马达外层再嵌套一个同步马达,构成复式结构的双层伺服马达,如图5a所示。其中内层马达用来加载,外层马达用来保持与承载马达同步,通过同步马达吸收加载系统中的扰动流量,加载系统的被动运动由同步马达来承担,这样就可以消除加载系统内部流量和压力的耦合,进而从加载原理上实现变被动加载为主动加载,从本质上解决电液负载模拟器中的多余力矩问题。具体实现方法是:在模拟仿真时,给同步马达和承载马达相同的位置指令信号,对同步马达和承载马达分别做闭环控制,通过控制算法保证两者同步运动,同时按照一定的加载梯度对加载马达施加力矩指令信号进行力矩闭环控制。本文将能够实现上述加载功能的加载马达称为复式同步加载伺服马达,结构及油路原理如图5所示。

(a)结构原理图

(b)油路原理图图5 复式同步加载伺服马达结构及油路原理图Fig.5 Compound synchronous load servo motor structure and oil circuit principle diagram
由图5可知,复式同步加载伺服马达是双层嵌套结构的复式摆动马达,外层是同步马达,内层是加载马达。其中同步马达转子兼作加载马达定子,加载马达定子、壳体及同步马达转子设计成一体化结构,加载马达转子输出轴和承载马达输出轴刚性连接。工作时只要保证同步马达转子跟随承载马达同步运动,即同步马达与承载马达保持“相对静止”,则同步马达的跟随运动吸收了由于加载马达的被动运动而产生的强迫流量,即解除了加载系统和承载系统之间的多余力矩。此时被动加载变成了主动加载,有效地消除了由于承载系统的主动运动而引起的多余力矩。
3 复式摆动马达参数匹配原则及结构设计
3.1 复式摆动马达参数匹配原则
复式摆动马达消除多余力矩的关键是保证同步马达和承载马达同步运动,理论上不仅要保证同步马达和承载马达的角速度相等,还要保证角速度的变化趋势保持相同,甚至角加速度的变化趋势也要相同。此外马达在启动、换向及停止时,由于两马达摩擦力矩及响应速度的差异,保证同步难度更大,为此要保证同步马达和承载马达的同步控制精度,理论上两马达的结构参数须保持完全一致。但由于复式摆动马达采用双层嵌套结构,同步马达和承载马达结构尺寸不可能完全一致,导致两马达的摩擦力矩不同。因此,设计复式摆动马达时须以保证同步马达和承载马达的响应速度相同为目标,按固有频率和阻尼比分别相等的原则进行参数匹配,在同步马达结构设计的密封方式选择上应尽可能地减小其摩擦力,以保证其跟踪承载马达同步运动的快速性。
3.2 复式摆动马达结构设计
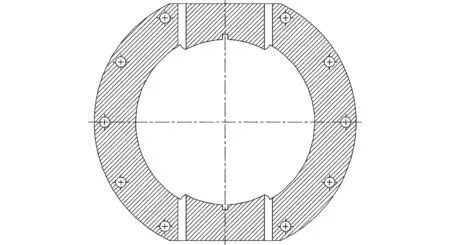
根据图5a复式摆动马达结构原理及参数匹配原则可知,外层同步马达结构参数的选取须能够与承载马达进行同步控制,内层加载马达结构参数须能够满足加载系统对加载性能的要求,同时内层加载马达套装在外层同步马达内部。综合考虑伺服阀及位置检测元件的布局、油道的设置及密封方式等,设计的复式摆动马达结构如图6所示,结构参数如表2所示。
由图6可以看出,加载马达套装在同步马达转子内部,其中同步马达转子兼作加载马达壳体,感应同步器转子与加载马达左端盖固定连接,感应同步器定子与同步马达左端盖固定连接,内层加载马达选择加载马达转子配油,外层同步马达选择壳体配油。同步伺服阀设置在同步马达壳体表面,加载伺服阀通过液压旋转接头设置在加载马达转子轴上。相比于单层马达,双层套装结构具有更长的泄漏和密封边界,而且套装结构增加了结构和油道的设计难度。

1.感应同步器定子 2.感应同步器转子 3.同步马达左端盖 4.同步马达左侧板 5.轴承 6.同步马达壳体 7.聚氨酯密封条 8.改性聚四氟乙烯密封条 9.改性聚四氟乙烯密封圈 10.同步马达右侧板 11.O形密封圈 12.同步马达右端盖 13.同步马达转子 14.加载马达右端盖 15.加载马达转子 16.加载马达左端盖图6 复式摆动马达结构图Fig.6 Structural diagram of compound swing motor

参数名称数值复式摆动马达叶片厚度35同步马达壳体外径253同步马达壳体内径173同步马达转子外径160同步马达转子内径120加载马达转子外径100加载马达转子内径55
3.2.1复式摆动马达密封技术
因复式摆动马达是双层嵌套结构,密封面积约是单层马达的两倍,静摩擦力矩较大,过大的静摩擦力矩使马达启动困难,降低马达的低速性能,影响多余力矩的消减,因此选择合适的密封形式是复式摆动马达设计中的关键问题。
马达中常用的动密封形式有间隙式和填料式两种,间隙密封摩擦力矩小、结构简单、寿命长、不发生固相摩擦;填料密封密封可靠,摩擦力矩大、安装维护方便。加载马达需要输出指令加载力矩,泄漏会引起输出力矩误差较大;同步马达需要保证与承载马达的同步精度,要求其响应速度快,启动摩擦力矩越小越好。综合考虑以上因素,外层同步马达选择间隙密封,内层加载马达选择填料式组合密封。复式摆动马达的组合密封通常由一个主密封件和一个辅助弹性密封件组成,属接触型自紧式密封,O形圈安装之后压缩变形产生反作用力施加在主密封件内部,使得主密封件与同步马达转子紧密接触[20]。
3.2.2加载马达油道设计
加载马达套装在同步马达内部,同步马达转子兼作加载马达壳体,因此加载马达采用轴配流方式,如图7所示。通过将加载马达配油口进行偏置,在几何突变区域多出一段缓冲区域,相当于对油道进行倒角式处理,有助于减小几何突变区域的压力和流速突变。设置偏置距离为油道半径,使油道突变处的过流面积最大,产生的局部压力损失最小,同时又不会产生节流效果。

图7 加载马达油道剖面图Fig.7 Profile diagram of load motor oil duct
由于加载马达油道设置在转子轴上,加载马达配油口随着转子的摆动而摆动,因此选用液压旋转接头对加载马达进行配油,液压旋转接头主轴跟随加载马达转子摆动,壳体固定。为了减小无效容积,提高加载马达的响应速度,加载伺服阀安装在液压旋转接头壳体上。
3.2.3同步马达油道设计
同步马达转子为中空式,内部为加载马达,因此同步马达采用壳体配油的方式,有3种配油方法,如图8所示。
图8a所示的配油方式简化了同步马达油道,降低了压力损失,但需要在同步马达壳体上设置对称油道,这样增加了其外部油管数,增大了无效容积,影响了同步马达的响应特性,并且给同步伺服阀的布置造成困难;图8b所示的油道设置在同步马达壳体内部,避免了图8a所示油道的缺点,但这种油道出现了几何形状突变,而且突变处为锐角,将产生较大的局部压力损失,由于同步马达内部压力较高且换向频繁,几何突变处应力集中且变化频繁,导致几何突变处容易出现严重的金属冲蚀,污染油液,导致伺服阀故障;图8c所示的圆弧形油道设置在同步马达壳体内部,油道为圆弧状,压力损失较小,机械加工方式难以实现,可采用精密铸造的方式,这样也可同时保证油道的表面精度。综上,采用图8c的油道设置方式。为了提高同步马达的响应速度,将同步伺服阀集成在同步马达壳体上。
(a)同步马达油道设置方式1

(b)同步马达油道设置方式2

(c)同步马达油道设置方式3图8 同步马达油道剖面图Fig.8 Profile diagram of synchronous motor oil duct
3.3 复式摆动马达流体特性分析
通过上述分析可知,油道设置是复式摆动马达设计的重点和难点,它直接影响复式摆动马达消除多余力矩的能力,因此需要运用ANSYS仿真分析软件对其进行流体特性分析以验证复式摆动马达油道设置的合理性。将复式摆动马达模型导入到ANSYS FLUENT生成复式摆动马达流体域并划分网格;采用RNGk-ε模型来描述液压油在复式摆动马达内部的流动状态;马达内部为46号液压油;压力差分格式采用标准离散差分格式,动量方程、湍动能方程和湍动能耗散率均采用一阶迎风差分格式;通过SIMPLE算法耦合求解速度和压力方程。设置连续性方程和动量方程收敛残差标准均为10-5,迭代步数为3000,如图9所示,残差在2338步实现收敛。复式摆动马达的流体特性如图10所示。

图9 RNG k-ε计算残差曲线Fig.9 Calculating residual curve of RNG k-ε

(a)复式摆动马达速度云图

(b)复式摆动马达压力云图图10 复式摆动马达速度及压力云图Fig.10 Velocity and pressure nephogram of compound swing motor
由图10a速度云图可见,同步马达流体域油液速度流线相互平行,油液流动稳定。液流在流经每个转向时,流体域的过流面积均会发生改变,因此液流速度也会发生改变,由马达的流线图可知,液流在转向时油道近壁面处的流速较快,但流线的形状并没有受到破坏,也没有产生较大的漩涡;从加载马达流体域流线分布看,液流并没有出现较大的漩涡,流线稳定。由图10b压力云图可见,两马达油道几何突变处均没有产生较大的局部压力损失,液流总的压力损失很小,保证了内层加载马达加载力矩的准确性。
4 复式摆动马达同步结构解耦仿真分析
同步结构解耦策略可以从根本上变被动加载为主动加载,从而从理论上消除电液负载模拟器的多余力矩。为了验证复式摆动马达消除多余力矩的有效性,搭建采用复式摆动马达作为加载装置的电液负载模拟器AMESim仿真模型。由于小梯度加载中多余力矩所占的比例大,更难以满足加载性能,因此以小梯度加载为例,分析以复式摆动马达作为加载执行元件消除多余力矩的有效性。复式摆动马达同步结构解耦的AMESim模型如图11所示。右侧为加载马达,左上侧为同步马达,左下侧为承载马达,同步马达转子与加载马达壳体通过旋转载荷相连;承载马达转子与加载马达转子通过连接杆相连,并在模型中考虑了油液的可压缩性和摆动马达的内泄漏,内泄漏设置为缝隙流。仿真模型参数由表1和表2得到。取加载梯度为2 N·m/(°),角位移信号为sin2πft,在5 Hz、10 Hz及16 Hz三种不同频率下,承载马达和加载马达的响应曲线如图12所示。
在位移响应曲线中,曲线1代表位移指令信号,曲线2代表承载马达位移响应,曲线3代表同步马达位移响应;力矩响应曲线中,曲线1代表力矩指令信号,曲线2代表加载马达力矩响应。

图11 同步结构解耦AMESim模型Fig.11 AMESim model of Synchronous structure decoupling

(a)位移响应曲线(f=5 Hz)
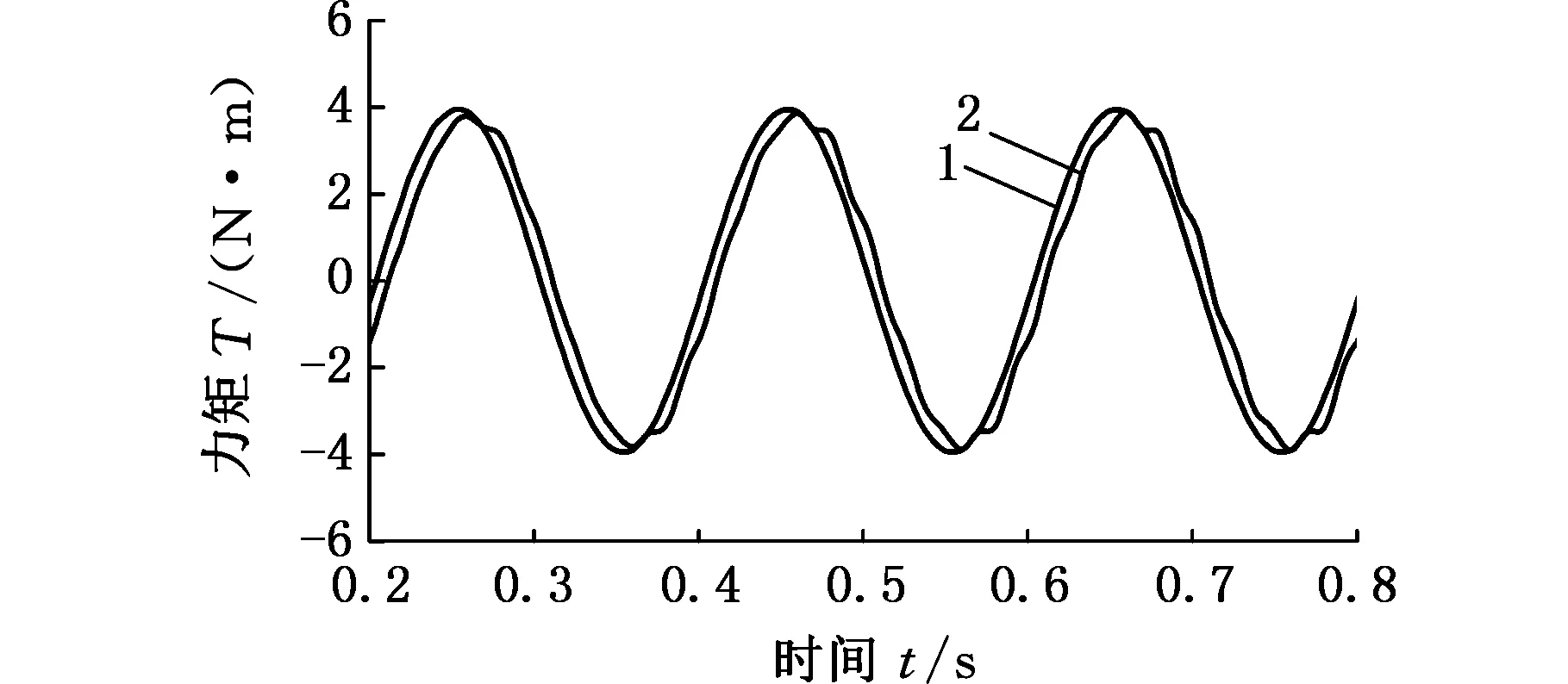
(b)力矩响应曲线(f=5 Hz)

(c)位移响应曲线(f=10 Hz)

(d)力矩响应曲线(f=10 Hz)

(e)位移响应曲线(f=16 Hz)

(f)力矩响应曲线(f=16 Hz)图12 不同频率下采用同步结构解耦策略的位移及力矩响应曲线Fig.12 Displacement and torque response curves with synchronous structure decoupling strategy under different frequencies
由图12可见,在不同频率下,位移及力矩响应曲线有不同程度的滞后,这主要是由加载系统本身的固有频率局限造成的,由系统本身频宽决定。在低频段采用复式摆动马达能够很好地解除电液负载模拟器的多余力矩;随着加载频率的增大,加载系统的跟踪性能有所下降,但是幅值衰减在10%以内,相位滞后小于10°,仍能满足电液负载模拟器性能指标中的“双十指标”。可见,同步结构解耦策略可有效地消除电液负载模拟器的多余力矩。
5 结论
(1)通过对电液负载模拟器数学模型的分析,揭示了多余力矩的产生机理,给出了各参数对多余力矩的影响规律。
(2)提出了一种基于新型加载执行元件复式摆动马达的被动式加载新方法,实现了将被动加载转变为主动加载的结构解耦策略,从本质上彻底解决了多余力矩问题。给出了复式摆动马达与承载马达的参数匹配原则,设计了马达结构方案,研究了复式摆动马达密封技术及内部流道构建方法。
(3)通过仿真分析证明了加载新方法的可行性和有效性。
[1] 汪成文, 焦宗夏, 罗才瑾. 基于改进的速度同步控制的电液负载模拟器[J]. 航空学报, 2012, 33(9): 1717-1725.
WANG Chengwen, JIAO Zongxia, LUO Caijin. An Improved Velocity Synchronization Control on Electro-hydraulic Load Simulator[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(9): 1717-1725.
[2] 李阁强, 顾永升, 李健,等. 被动式电液力伺服系统的自适应反步滑模控制[J]. 兵工学报, 2017, 38(3): 616-624.
LI Geqiang, GU Yongsheng, LI Jian, et al. Adaptive Backstepping Sliding Mode Control of Passive Electro-hydraulic Force Servo System[J]. Acta Armamentarii, 2017, 38(3): 616-624.
[3] 郝经佳, 赵克定, 许宏光,等. 双阀控制在电液负载仿真台中的应用[J]. 中国机械工程, 2002, 13(10): 814-816.
HAO Jingjia, ZHAO Keding, XU Hongguang, et al. The Application of Double Valve Control with Pressure and Flow Servo Valve in Electro-hydraulic Load Simulator[J]. China Mechanical Engineering, 2002, 13(10): 814-816.
[4] 王经甫, 叶正茂, 李洪人,等. 双阀并联控制在船舶舵机电液负载模拟器多余力抑制中的研究[J]. 机械工程学报, 2005, 41(4): 229-233.
WANG Jingfu, YE Zhengmao, LI Hongren, et al. Study on Eliminating the Superfluous Force of Marine Electrohydraulic Load Simulator Applied with Dual-valve Parallel Connected Control[J]. Chinese Journal of Mechanical Engineering, 2005, 41(4): 229-233.
[5] 符文星, 孙力, 于云峰,等. 大力矩电动负载模拟器设计与建模[J]. 系统仿真学报, 2009, 21(12): 3596-3598.
FU Wenxing, SUN Li, YU Yunfeng, et al. Design and Model-building of Motor-driven Load Simulator with Large Torque Outputs[J]. Journal of System Simulation, 2009, 21(12): 3596-3598.
[6] 吴乐彬. 基于电液伺服并联六自由度机构的广义负载模拟理论和实验研究[D]. 杭州: 浙江大学, 2010: 24-43.
WU Lebin. Research on Theory and Experiment of the Generalized Load Simulator Based on Electro-hydraulic Parallel 6DOF Manipulator[D]. Hangzhou: Zhejiang University, 2010: 24-43.
[7] 张立勋, 孟庆鑫, 刘庆和,等. 位置同步补偿克服负载模拟器干扰力矩及提高系统频宽的理论与实验研究[J]. 宇航学报, 1997, 18(1): 121-124.
ZHANG Lixun, MENG Qingxin, LIU Qinghe, et al. Experimental and Theoretic Study on Eliminating the Disturbance Torque and Widening the Frequency Band Width of the Load Simulator Using Position Synchro Compensation[J]. Journal of Astronautics, 1997, 18(1): 121-124.
[8] 杨春卫, 代建辉, 毕树生,等. 复合负载模拟器的设计与实现[J]. 北京航空航天大学学报, 2013, 39(12): 1660-1664.
YANG Chunwei, DAI Jianhui, BI Shusheng, et al. Design and Implementation of a Compound Load Simulator[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(12): 1660-1664.
[9] 李阁强, 赵克定, 袁锐波,等.μ理论在电液负载模拟器中的应用[J]. 航空学报, 2007, 28(1): 228-233.
LI Geqiang, ZHAO Keding, YUAN Ruibo, et al. Application of μ Theory in Electrohydraulic Load Simulator[J]. Acta Aeronautica et Astronautica Sinica, 2007, 28(1): 228-233.
[10] 欧阳小平, 李锋, 朱莹,等. 重载航空负载模拟器非线性最优前馈补偿控制[J]. 航空学报, 2016, 37(2): 669-679.
OUYANG Xiaoping, LI Feng, ZHU Ying, et al. Nonlinear Optimal Feedforward Compensation Controller for Heavy Load Aviation Load Simulator[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(2): 669-679.
[11] 岳欣, 姚建勇. 基于积分鲁棒的电液负载模拟器渐近跟踪控制[J]. 航空学报, 2017, 38(2): 289-298.
YUE Xin, YAO Jianyong. Integral Robust Based Asymptotic Tracking Control of Electro-hydraulic Load Simulator[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(2): 289-298.
[12] 李成功, 靳红涛, 焦宗夏,等. 电动负载模拟器多余力矩产生机理及抑制[J]. 北京航空航天大学学报, 2006, 32(2): 204-208.
LI Chenggong, JIN Hongtao, JIAO Zongxia, et al. Mechanism and Suppression of Extraneous Torque of Motor Driver Load Simulator[J]. Journal of Beijing University of Aeronautics and Astronautics, 2006, 32(2): 204-208.
[13] HAN S S, JIAO Z X, YAO J Y. Compound Velocity Synchronizing Control Strategy for Electro-hydraulic Load Simulator and Its Engineering Application[J]. Journal of Dynamic Systems Measurement & Control, 2014, 136(5): 0510021-3.
[14] ZHOU G Z, GUO D, QI X Y. A Superfluous Force Suppression Method Based on Structure Invariance Principle with Particle Swarm Optimization Algorithm[J]. Advanced Materials Research, 2012, 430/432: 1877-1880.
[15] WANG C W, JIAO Z X, QUAN L. Adaptive Velocity Synchronization Compound Control of Electro-hydraulic Load Simulator[J]. Aerospace Science and Technology, 2015, 42(9): 309-321.
[16] WANG C, HOU Y L,LIU R Z, et al. Control of the Electric Load Simulator Using Fuzzy Multiresolution Wavelet Neural Network with Dynamic Compensation[J]. Shock & Vibration, 2016, 2016(12): 1-10.
[17] JING C H, XU H G, ZHENG D K. A Practical Compound Control Strategy for Electro-hydraulic Load Simulator [C]//International Conference on Fluid Power and Mechatronics. New York: IEEE, 2015: 1228-1233.
[18] 李阁强, 杨红艳, 赵巧莉,等. 一种电液伺服加载系统用复式液压摆动缸:中国,201310003344.3[P]. 2014-04-16.
LI Geqiang, YANG Hongyan, ZHAO Qiaoli, et al. A Kind of Electro-hydraulic Servo Loading System with Double Swing Hydraulic Cylinder: China, 201310003344.3[P]. 2014-04-16.
[19] 杨红艳. 被动式电液力伺服系统的同步解耦控制研究[D]. 洛阳: 河南科技大学, 2013: 4-30.
YANG Hongyan. Synchronization Decoupling Control Study of Passive Electric-hydraulic Servo System[D]. Luoyang: Henan University of Science and Technology, 2013: 4-30.
[20] 李阁强, 赵巧莉, 李跃松,等. 电液伺服摆动马达密封结构研究[J]. 润滑与密封, 2015, 40(4): 9-13.
LI Geqiang, ZHAO Qiaoli, LI Yuesong, et al. Research on Sealing Structure of Electro-hydraulic Servo Swing Motor[J]. Lubrication Engineering, 2015, 40(4): 9-13.
ResearchonSynchronousStructureDecouplingofElectro-hydraulicLoadSimulators
LI Geqiang1,3LIU Wei1HAN Weifeng2DENG Xiaozhong1,3
1.School of Mechatronics Engineering,Henan University of Science and Technology,Luoyang, Henan,471003 2.State Key Laboratory of Shield Machine and Boring Technology,Zhengzhou,450001 3.Collaborative Innovation Center of Machinery Equipment Advanced Manufacturing of Henan Province,Luoyang,Henan,471003
In order to study the extra torque problems of EHLSs, taking the valve control swing motor of EHLS as an object, a new principle of synchronous structure coupling was proposed, which was based on the analyses of the extra torque mechanism and influence factors. The concrete way was to design the load actuator into a compound bilayer structure, where the outer synchronous motor was used to track the bearing motor for position synchronization control, and the inner motor was used to load. Through the load actuator of the compound structure, the passive loads were modified into active loads, and the problems of extra torque were solved fundamentally. The principles of parameter matching, the design of the seals and the structures of the compound swing motors were given, and the rationality of the oil duct in the inner and outer motors was simulated and tested. Finally, through simulation analysis of EHLS under small gradient loading, the correctness and effectiveness of synchronous structure decoupling were verified.
electro-hydraulic load simulator(EHLS); extra torque; synchronous structure decoupling; compound swing motor
2017-08-02
国家自然科学基金资助项目(51175148);盾构及掘进技术国家重点实验室开放课题资助项目(2014-03)
V216.8
10.3969/j.issn.1004-132X.2017.24.006
(编辑王艳丽)
李阁强,男,1971年生。河南科技大学机电工程学院博士,机械装备先进制造河南省协同创新中心测控技术平台副主任。主要研究方向为机电液一体化技术,流体传动与控制。获省部级一等奖、二等奖各1项。发表论文30余篇。E-mail:hitligeqiang@163.com。刘威,男,1989年生。河南科技大学机电工程学院硕士研究生。韩伟锋,男,1985年生。盾构及掘进技术国家重点实验室工程师。邓效忠,男,1957年生。河南科技大学机电工程学院教授、博士研究生导师,机械装备先进制造河南省协同创新中心主任。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
小哥白尼(趣味科学)(2021年6期)2021-11-02
小学生学习指导(中年级)(2021年5期)2021-05-18
化工管理(2021年7期)2021-05-13
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
装备制造技术(2020年3期)2020-12-25
甘肃教育(2020年4期)2020-09-11
现代装饰(2019年10期)2019-10-17
铁道通信信号(2019年6期)2019-10-08
