四旋翼无人机悬停飞行自适应PD控制器设计
2017-12-28 08:49李艾棠谭功全郭金虎
四川轻化工大学学报(自然科学版) 2017年6期
李艾棠, 谭功全, 郭金虎
(四川理工学院自动化与信息工程学院, 四川自贡643000)
四旋翼无人机悬停飞行自适应PD控制器设计
李艾棠, 谭功全, 郭金虎
(四川理工学院自动化与信息工程学院, 四川自贡643000)
提出一种基于模型参考的自适应PD控制器设计方法,用于质量可变的四旋翼无人机的悬停飞行控制。由无人机的动力学方程对悬停飞行时姿态角近似处理得出参考模型,根据参考模型选取一个与实际系统相似并且有期望动态特性的二阶系统。基于Lyapunov稳定性理论的方法,通过被控对象的输出与参考模型输出之间的误差确定控制器的参数,当被控对象参数发生变化时,自适应机构通过参数估计调整PD控制器的输出,使被控对象参数的估计值总能跟踪其实际值,并分别与常规的PD控制器和加入了限速补偿环节的PD控制器进行仿真实验对比。结果表明,该控制器的控制信号比常规的PD控制器超调量小;比加入了限速补偿环节的PD控制器调节速度快,稳定性更好。对于四旋翼无人机的悬停有更好的控制效果。
四旋翼无人机;比例微分控制器;悬停飞行;自适应
引言
四旋翼飞行器结构简单、机动性强、灵活性高,一般有定高、绕圈、悬停等多种飞行模式,可以飞至离目标更近的区域进行悬停,不像传统的大型直升机由于巨大的旋翼而不能靠近目标,也不像传统固定翼飞行器不能悬停[1]。而悬停模式作为最简单的一种飞行模式,通常被用作实验模式以获取无人机的某些动力学参数以及验证控制器的可靠性。无人机在悬停过程中其倾斜角为零,不需要考虑水平方向上的运动[2],因此其动力学模型可以作简单的线性化处理。
四旋翼无人机的控制方法主要有:PID控制[3-4]、滑模控制[5](Sliding-Mode)、反步法[6-8](Backstepping)、线性二次型[9-10](LQ)、神经网络自适应[11]、反馈线性化[12-13](Feedback Linearization)以及H∞[14-15]控制等。
在军事侦察、日常航拍、气象监测、森林防火这些领域的应用时,无人机动力学参数基本是不发生变化的,对于这样的情况使用常规的控制方法设计的控制器已经能够很好地控制无人机的飞行,但在某些实际应用领域中,无人机的动力学参数是会发生变化的,如喷洒农药的无人机,其质量会随着农药量的减少而减小;运送快递包裹的无人机质量也会随着包裹的质量不同而不同,同时它们绕机体坐标系三轴旋转的转动惯量也会随着质量的变化而变化。这时无人机系统将变为时变系统,常规的PD控制器已经不能很好地对其进行控制,那么就需要一种更好的方法来设计控制器。
本文采用自适应控制理论与PD控制器相结合的方法设计出了一种模型参考自适应PD控制器(Model Reference Adaptive PD Controller)用于质量可变的四旋翼无人机的悬停控制,并对其进行了Matlab/Simulink仿真,进一步验证了这种控制器的效果。
1 四旋翼无人机的动力学模型
四旋翼无人机的动力学模型可通过牛顿-欧拉方法[16]、欧拉-拉格朗日方法[17]、四元数法[18]等多种方法建立,本文不再赘述。忽略空气阻力,在小角度条件下四旋翼无人机的近似动力学数学模型可以表示为:
(1)
式中:x、y、z表示无人机的质心在惯性坐标系中的坐标;φ、θ、ψ表示无人机的三个倾斜角,m表示无人机的质量,b表示螺旋桨的升力系数;τφ、τθ、τψ分别表示偏航力矩、俯仰力矩和滚转力矩;Ωi(i=1,2,3,4)表示四个旋翼的旋转角速度。
四旋翼无人机悬停时θ≈0、φ≈0,其飞行高度近似满足:
(2)
(3)
将式(3)代入式(2),得:
(4)
记无人机的控制输入为:
(5)
式中k0的值与输出信号的占空比相关。
联立式(4)与式(5),得:
(6)


(7)
此即为四旋翼无人机系统在悬停模式下的传递函数。
2 模型参考自适应PD控制器设计
2.1 模型参考自适应PD控制的原理
模型参考自适应控制系统的基本结构如图1所示,它由两部分组成:由控制器和被控对象组成内环,由参考模型和自适应机构组成外环。实际上就是在常规的负反馈控制回路上并联一个参考模型以及自适应控制器[19]。
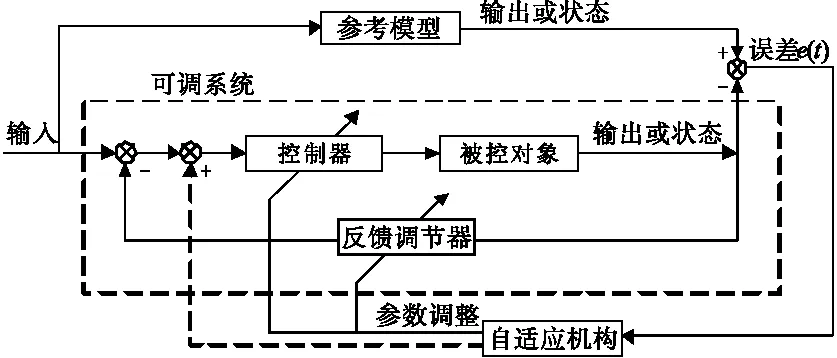
图1模型参考自适应控制系统
在该控制系统中,被控对象的参数是不确定或可以发生改变的,控制器有一个初始参数,而参考模型是一个具有较好动态及静态特性的系统,将目标信号同时作用在控制器及参考模型上,对被控对象的输出或状态及参考模型的输出模型及状态进行比较,将它们的误差信息按照一定的规律计算,产生一个辅助的输入信号或产生控制器的参数变量[20]。目的是使得被控对象的输出能够尽可能地跟踪参考模型的输出,当被控对象的参数发生变化或系统受到外界干扰使得输出偏离平衡位置时,误差将会增大,这时自适应机构再次调整控制系统的参数使得被控对象的输出再次趋近于参考模型的输出。
模型参考自适应控制器设计的核心是通过被控对象的输出与参考模型的输出之间的误差确定控制器的参数,有两种方法:一种是利用优化方法寻找控制器的最优参数,使得系统满足某个评价指标,通常使用的指标是使J达到最小:

(8)
另一种方法是基于稳定性理论保证控制系统的稳定性,通常用的是基于Lyapunov稳定性理论的设计方法,本文通过第二种方法来确定控制器的参数。
2.2 模型参考自适应PD控制器的数学模型
设计了一种基于期望动态特性的PD控制器来控制四旋翼无人机的飞行高度,控制对象为二阶积分过程,控制系统的闭环特征方程为:
(9)
期望的闭环特征方程为:
(10)
联立式(9)、式(10)可得:
(11)
PD控制器的参数kc及kd与被控对象的参数k相关,由式(11)可知,总能找到合适的kc及kd,使得控制系统具有期望的动态响应,当被控对象参数k发生变化时,自适应机构通过对其进行估计来自适应调整PD控制器的输出。
由式(7)知,参考模型选取一个与实际系统相似并且有期望动态特性的二阶系统,参考模型中的被控对象参数不变,其结构如图2所示。

图2参考模型的结构
基于式(10)的期望动态特性的PD控制器增益与被控对象的参数满足如下关系:
(12)
故,参考模型的结构可简化为图3所示。
该系统的闭环传递函数为:

(13)
对应的微分方程为:
(14)
取系统的状态变量为:
x1d=y

(15)
式中,x为系统输入,y为系统输出。
同理,实际的控制系统的结构如图4所示。

图4实际系统的结构


(16)
实际控制系统的闭环传递函数为:

(17)
对应的微分方程为:
(18)
取系统的状态变量为:
x1=y

(19)
PD控制器的控制输出为:
(20)

(21)
对式(21)两端求导,得:
(22)
构造Lyapunov函数:
(23)
对式(23)两端同时求导,得:
(24)
(25)
所以,被控对象的参数估计值为:
(26)

2.3 受干扰时的悬停控制
无人机在飞行过程中受到的外界干扰主要为风力干扰及电磁干扰。电磁干扰可以视为一种白噪声干扰,可在姿态解算时通过滤波加以消除,而影响无人机飞行高度的风力干扰主要是发生在下击暴流天气中的向下气流[21]。下击暴流是一大团下降到地面的冷空气,当这些气流接近地面是,气流改变方向,向外辐射流出。由于下击暴流是一种不可预测的天气现象,若无人机在飞行过程中遇到这种天气,可认为是无人机的质量发生了改变,这和我们设计之初提出的理念一样。而当无人机遇到侧风干扰时,无人机的姿态发生变化,即无人机的姿态角发生变化(主要为偏航角),这时自适应机构通过控制姿态角对无人机的姿态进行修正,使之继续保持悬停。下面主要分析对偏航角的控制。
单独对无人机只有偏航角发生变化时,俯仰角、横滚角近似不变,且满足俯仰角θ≈0,横滚角φ≈0,无人机偏航运动的动力学方程为:
(27)


(28)
偏航角的控制器的控制率为:
(29)
传递函数为:
(30)
参数整定方法同上,参数整定结果为:
(31)
从式(31)可以看出,自适应机构对偏航角的控制类似于高度控制,总可以使控制参数估计值跟踪其真实值,进而对偏航角进行修正,姿态恢复。
3 仿真验证
对该系统设计Matlab仿真,用阶跃信号加方波信号来表示期望高度,用斜波信号加方波信号来表示被控对象的实际参数变化,Lyapunov函数中的参数γ=0.1,参考模型的阻尼比ξ=0.9,无阻尼自然频率wn=2[22],被控对象的参数在误差范围内的近似值0.025,仿真结果如图5所示。

图5模型参考自适应PD控制系统仿真结果
图5(a)表示输入系统的期望高度以及参考模型及实际系统的响应输出,从响应结果来看,实际控制系统能很好地跟踪参考模型的输出,模型参考选取的正确性进一步得到验证。
图5(b)表示被控对象的参数k的真实值及估计值,当实际控制系统与参考模型之间有误差时,参数估计器开始计算被控对象的实际参数,当误差为零时被控对象的参数不被修正,也说明当无人机质量发生变化时,即k发生变化,自适应系统产生的估计值总能够跟踪k的值,对无人机进行悬停控制。
图5(c)表示参数估计器的输入及输出,输入为参考模型与实际控制系统的状态变量之间的误差,输出为被控对象的参数值,
图5(d)为参考模型及实际系统的控制量,结合仿真结果可知,当实际系统与参考模型的输出之间无误差时,被控对象参数的估计值不会更新,而当实际系统与参考模型的输出之间出现误差时,参数估计器才会对被控对象参数进行估计,从而改变控制器的输出。
在实际的控制过程中,同样存在输入饱和的问题,将本文设计的模型参考自适应PD控制器(记为PD1)分别与常规PD控制器(记为PD2)及加入限速补偿环节的PD控制器(记为PD3)进行比较,用三者分别对四旋翼无人机的飞行高度进行控制,设定期望高度为20 m,无人机电机转速的安全范围设定为700~1000 rpm,在Matlab中进行仿真,仿真结果如图6所示。

图6几种PD控制器的比较
图6(a)为模型参考自适应PD控制器与常规PD控制器的控制响应对比,显然,常规的PD控制器有较大的超调,对于期望的悬停控制高度有较大的波动,对于精度要求较高的场合,悬停高度可能在超调阶段已经超出实际允许的范围,显然模型参考自适应PD控制器效果更好;图6(b)为模型参考自适应PD控制器与加入限速补偿环节的PD控制器的控制响应对比,由仿真结果可知,二者的调节时间基本相等,加入限速补偿环节的PD控制器的调节过程较平缓,控制信号对无人机悬停高度控制缓慢,因而无人机姿态调整较平缓、时效性差,而模型参考自适应PD控制器虽然在调节前期有很快的调节速度,但为防止过大超调,在调节后期速度稍微放缓,综合而言,模型参考自适应PD控制器对悬停高度控制有更好的效果。
4 结束语
本文考虑一类时变系统的自适应控制,被控对象是动力学参数可变的四旋翼无人机的飞行高度,采用了模型参考自适应PD控制的方法,对控制器的原理进行了介绍,并设计了适用于四旋翼无人机悬停控制的控制器[23]。
模型参考自适应控制器选择具有较好响应的二阶系统作为参考模型,基于Lyapunov稳定性理论对被控对象的参数进行了估计,利用估计的参数对PD控制器进行自适应校正,从Matlab仿真结果可以看出,本文设计的控制器对四旋翼无人机的飞行高度有很好的控制效果。
[1] CAPELLO E,SCOLA A,GUGLIERI G,et al.Mini quadrotor UAV:design and experiment[J].Journal of Aerospace Engineering,2012,25(4):559-573.
[2] 杨瑞,王小丽,王强,等.风力机尾流场及相互作用的实验研究[J].四川理工学院学报:自然科学版,2015,28(4):11-16.
[3] SALIH A,MAHMOUD M,MOHAMED H,et al.Flight PID Controller design for a UAV quadrotor[J].Scientific Research and Essays,2010,5(23):3660-3667.
[4] ERGINER B,ALTUG E.Modeling and PD control of a quadrotor VTOL vehicle[C]//Proceedings of the 2007 IEEE Intelligent Vehicles Symposium,Istanbul,Turkey,June 13-15,2007:894-899.
[5] DIERKS T,JAGANNATHAN S.Neural network output feedback control of a quadrotor UAV[C]//Proceedings of the 47thIEEE Conference on Decision & Control,Cancun,Mexico,December 9-11,2008:3633-3639.
[6] 聂博文.微小型四旋翼无人直升机建模及控制方法研究[D].长沙:国防科学技术大学,2006.
[7] KöKSAL N,HAO A N,FIDAN B.Two-Level nonlinear tracking control of a quadrotor unmanned aerial vehicle[J].Ifac Papersonline,2016,49(17):254-259.
[8] AL-HIDDABI S A.Quadrotor control using feedback linearization with dynamic extension[C]//Proceeding of the 6th International Symposium on Mechatronics and its Applications(ISMA09),Sharjah,UAE,March 23-26,2009:82-84.
[9] BOUABDALLAH S,NOTH A,SIEGWAN R.PID vs LQ control techniques appliedto an weight augmentation high energy conruniption indoor micro quadrotor[C]//Proceedings of 2004 IEEE/RSJ International Conference On Intelligent Robots and Systems,Sendai,Japan,September 28-October 2,2004:2451-2456.
[10] BAUER P,RITZINGER G,SOUMELIDIS A,et al.LQ servo control design with Kalman filter for a quadrotor UAV[J].Periodica Polytechnica Transportation Engineering,2008,36(5):9-14.
[11] DAS A,LEWIS F,SUBBARAO K.Backstepping approach for controlling a quadrotor using Lagrange form dynamics[J].Journal of Intelligent & Robotic Systems,2009,56(1-2):127-151.
[12] LEE D,KIM H J,SASTRY S.Feedback linearization vs adaptive sliding mode control for a quadrotor helicopter[J].International Journal of Control Automation & Systems,2009,7(3):419-428.
[13] BOROUJENI Z,MOHAMMADI M,BOROUJENI S,et al.Adaptive feedback linearizing tracking control of a quadrotor helicopter[C]//Proceedings of the 2nd International Symposium on Computing in Science and Engineering,Izmir,Turkey,June 1-4,2011:2035-2041.
[14] Mokhtari A,Benallegue A,Daachi B.Robust feedback linearization and GH∞ controller for a quadrotor unmanned aerial vehicle[J].Journal of Electrical Engineering,2006,57(1):20-27.
[15] RAFFO G V,ORTEGA M G,RUBIO F R.An integral predictive/nonlinear H∞ control structure for quadrotor helicopter[J].Automatica(Journal of IFAC),2010,46(1):29-39.
[16] FERMI G,NICOLAS M,AHMAD H,et al.Bounded attitude control of rigid bodies:Real-time experimentation to a quadrotor mini-helicopter[J].Control Engineering Practice,2011,19(8):790-797.
[17] 丁少宾,肖长诗,刘金根,等.X型四旋翼无人机建模及四元数控制[J].系统仿真学报,2015,27(12):3057-3062.
[18] ANEZKA C,TOMAS F,LUBOS C,et al.Mathematical modelling and parameter identification of quadrotor[J].Procedia Engineering,2014,96:172-181.
[19] 朱冰.四旋翼飞行器的模型参考自适应控制研究[J].计算机测量与控制,2014,22(6):1745-1776.
[20] 杨艳萍,张大伟.基于粒子群优化设计算法的输出跟踪控制[J].自动化技术与应用,2016,35(1):8-13.
[21] ROGELIO L.Unmanned aerial vehicles:embedded control[M].New Jersey:John Wiley & International Rights Sons,Inc,2010.
[22] 陈永会,谭功全,沈勇.阻尼比约束的时滞系统最优PI调节器设计[J].控制工程,2015,22(4):720-724.
[23] 魏青铜,陈谋,吴庆宪.输入饱和与姿态受限的四旋翼无人机反步姿态控制[J].控制理论与应用,2015,32(10):1361-1369.
Design of Hover Flying Adaptive PD Controller for Four Rotor Unmanned Aerial Vehicle
LIAitang,TANGongquan,GUOJinhu
(School of Automation & Information Engineering, Sichuan University of Science & Engineering, Zigong 643000, China)
An adaptive PD controller design method based on model reference is proposed, which is used to control the suspension of the four rotorcraft with variable quality. The reference model is obtained by approximating the attitude angle of the hovercraft by the kinetic equation of the UAV, and a second order system is selected according to the reference model which is similar to the actual system and has the expected dynamic characteristics. Based on the method of Lyapunov's stability theory, the parameters of the controller are determined by the error between the output of the controlled object and the output of the reference model. When the controlled object parameter changes, the PD controller is adjustedby parameter estimation of the adaptive mechanism, so the estimated value of the controlled object parameter can always track its actual value. The conventional PD controller and the PD controller with the speed limit compensation are compared with it respectively.The results show that the control signal of the controller is smaller than that of the conventional PD controller. It is faster and more stable than the PD controller with the speed limit compensation,and also has a better control effect for the four-rotor UAV hover.
four-rotor unmanned aerial vehicle; proportional differential controller; hover flight; adaptive
1673-1549(2017)06-0054-07
10.11863/j.suse.2017.06.10
2017-09-06
四川省教育厅科研基金(12ZA097;14ZA0205)
李艾棠(1991-),男,四川德阳人,硕士生,主要从事电力系统及智能控制方面的研究,(E-mail)565562454@qq.com
谭功全(1970-),男,重庆壁山人,教授,主要从事控制理论及其应用、嵌入式系统及其应用等方面的研究。
TP13
A
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
环球时报(2020-08-11)2020-08-11
电子制作(2019年9期)2019-05-30
机电工程技术(2018年10期)2018-12-06
北京航空航天大学学报(2016年8期)2016-11-16
军事运筹与系统工程(2016年3期)2016-09-26
电脑知识与技术(2016年10期)2016-06-16
锻压装备与制造技术(2013年1期)2013-06-29
重庆理工大学学报(自然科学)(2012年5期)2012-07-06