
纯电动汽车动力匹配及校验仿真
2017-12-28 09:10丁舟波李晨旭张君浩
装备制造技术 2017年10期
丁舟波,李 彬,李晨旭,张君浩
(中原工学院,河南 郑州450007)
纯电动汽车动力匹配及校验仿真
丁舟波,李 彬,李晨旭,张君浩
(中原工学院,河南 郑州450007)
以某款纯电动汽车为例,根据其基本技术参数和设计要求,建立数学模型并对该车的电机和电池进行参数匹配,利用MATLAB对其动力性进行仿真分析,结果表明,动力参数匹配合理,满足纯电动汽车动力性要求。
MATLAB;纯电动汽车;参数匹配;仿真分析
0 引言
汽车动力性是汽车各种性能中最基本、最重要的性能[1]。所以,研究纯电动汽车的动力性对于其车辆性能有着重要的意义,而动力参数的合理匹配又对于提高纯电动汽车动力性起到关键作用。本文根据现有的某纯电动车电机和电池数据进行参数匹配研究,提高纯电动汽车动力性。
1 纯电动汽车的动力系统结构
1.1 纯电动汽车的组成及主要参数
电动汽车的动力系统主要由四个部分组成,即电动机、动力电池、传动系以及控制系统[2]。表1为参考的纯电动汽车的主要参数。

表1 纯电动汽车的整车主要参数
1.2 纯电动汽车动力性能要求
车辆动力性的三大指标分别是最高车速、加速时间以及最大爬坡度,所以主要按照这三个方面得到纯电动汽车的设计要求如表2所示。

表2 设计要求
2 纯电动汽车动力参数匹配
2.1 驱动电机匹配
城市电动汽车经常出现停车、加减速和爬坡等过程,所以电动汽车的电机往往不在额定的工作状态,它对转矩的动态要求很高。因此,不仅需要依据电机持续功率,而且需要获取电机的最大转矩、最大功率以及最大转速。
2.1.1 电机转矩
电机最大转矩应该满足最大爬坡度的设计要求,所以当汽车用一档以最大爬坡度要求爬坡时,速度为15 km/h,不存在加速阻力,故应该满足公式:

2.1.2 电机功率
电机功率一般分为瞬时功率(即最大功率)和持续功率(即额定功率)。
首先以满足最高稳定行驶车速来确定最大额定功率,经单位换算后得到汽车功率平衡方程式:

其中Pemax为最大额定功率,umax为汽车稳定行驶的最高速度。求得Pe≥8.94 kW.
当车辆达到设计要求的最大速度时,车辆的最大额定功率也可以确定下来[3]。
然后根据汽车爬坡度来确定其最大功率,故有公式:

其中Pmax1为电机所需的最大功率,由以上公式求得Pmax1≥17.75 kW.
2.1.3 电机转速
电动汽车以最大速度行驶的工况对应的是电机的最大转速,所以有公式:

式中np为电机的最大转速,求得np≥5 006.52 rpm,同时如果代入常规车速,取值35 km/h可以得到电机的额定转速为nm=2 190.35 rpm.
结合上述结论确定电机参数如表3所示。

表3 电机基本参数
2.2 电动汽车电池的匹配
2.2.1 电池类型的选择
电池技术是电动汽车的瓶颈,所以选择合适的电池类型对于汽车而言尤为重要[4],综合考虑整车的性能和成本等各项因素后,选用锂离子电池最为合适。
2.2.2 电池参数匹配
首先计算出电池的实际能量W实(kW/h):

其中Ue指电池组的平均电压(V);C指单体电池的容量(Ah).
然后计算出电动汽车所需要消耗的能量W需,先假设汽车正常行驶速度ve以40 km/h匀速行驶,计算出所需功率P需,有:


得到电动汽车行驶里程s所需的能量W需必须满足W实≥ W需.
最后,由上述条件可以算出纯电动汽车的巡航里程s为:s=Ue×C×ξ×Ve/P需.
其中ξ为电池的有效放电容量,取0.8.所以匀速下续航里程按照150 km计算的话,选择电池组电压为336 V,则由此公式计算出电池容量C=39.4 Ah,所以初步确定电池组的总电压为336 V,容量为50 Ah.前面忽略了附件的功率消耗,相关资料表明电动汽车附件的能量消耗大约占整车能量的15%左右,所以真正所需要的能量还应该除以85%,在与电池的实际能量作比较。计算得W实=16.8 kW,W需/85%=12.47 kW,满足设计要求。
所以选择电池参数如表4所示。

表4 磷酸铁锂电池主要参数
3 动力参数匹配结果验证
根据上述计算结论,并根据汽车理论知识,利用动力因子对车辆动力性进行评价。建立纯电动汽车的仿真模型,进而对纯电动车的动力性能,即最高车速、加速时间以及爬坡度进行结果验证。
3.1 加速时间验证
根据已知的驱动电机的外特性、传动系统的效率以及整车的基本参数,通过简单的数学计算,可以得到汽车速度0~80 km/h的加速时间:

其中,v1为加速测试时对应的初始车速,取值为0;v2为加速测试时对应的末速度,取值22.22 m/s;Tp(v)代表电机的外特性转矩。通过MATLAB计算模型得到结果如下。
由图1可知汽车速度从0~80 km/h的加速度时间为21.42 s.
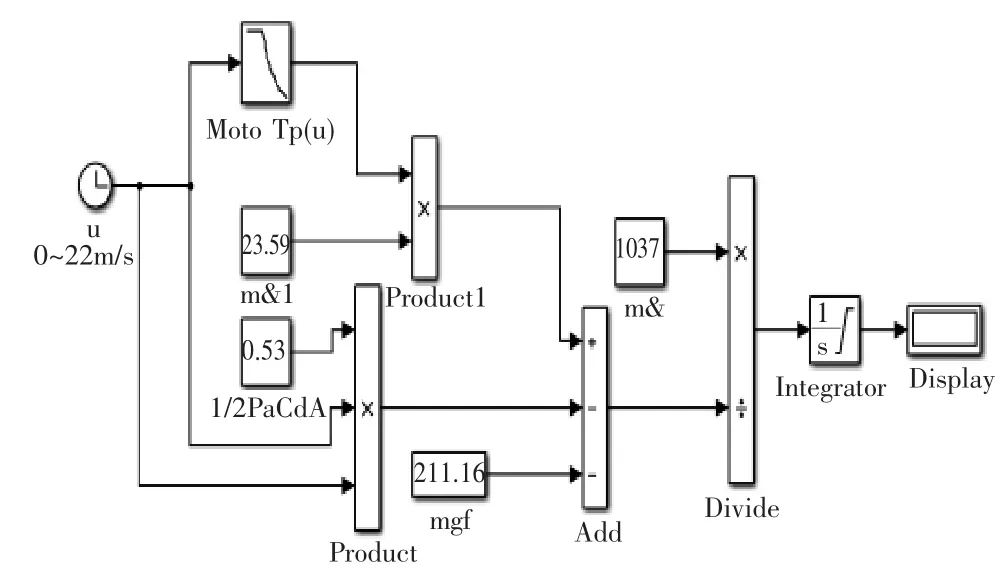
图1 加速性能的仿真计算模型
3.2 爬坡度和最高车速的验证
依据已知的电机外特性数据和整车参数,利用MATLAB软件将其编写成m文件并运行程序,然后将离散的数据点拟合整理得到驱动力行驶阻力平衡图和车速爬坡度曲线(如图2、图3).

图2 驱动力行驶阻力平衡图

图3 车速爬坡度曲线
图2 中间的斜线表示电机作用在车轮上的驱动力,其余的5条线表示车辆分别在0、10%、20%、30%、40%的爬坡度的条件下所对应的行驶阻力。由图2可知,当i为零时,即车辆在平坦的路面行驶,行驶阻力曲线与驱动力曲线是没有交点的,此时车辆的最高车速由电机的最大转速决定。因此,当电机转速为6 000 rpm时,计算得到对应的最高车速为95.875 km/h.由图3可知,当下车速为15 km/h时,对应的最大爬坡度24.26%.
由表5可以看出,纯电动汽车的动力系统的参数设计满足整车动力性的指标要求,同时也验证了文中所匹配的参数与设计方法的可行性[5]。

表5 整车动力性能指标验证结果
4 结束语
以某款纯电动汽车为例,根据其动力性能要求,对其机电传动系统进行匹配计算,并验证了其可行性,该纯电动车传动系统匹配方法对整车模型的搭建与系统工程的实现具有理论指导意义。
[1]余志生.汽车理论[M].北京:机械工业出版社,2009:7-8.
[2]李夏楠.纯电动汽车动力参数优化方法仿真研究[D].武汉:武汉理工大学,2013.
[3]James T,Darren B.The Lotus Range Extender Engine[J].SAE,2010(1):25-30.
[4]郭自强.电动车电池的发展现状[J].电池工业,2008(1):55-59.
[5]何小明.电动汽车动力蓄电池系统仿真及其管理系统的研究[D].上海:上海交通大学,2004.
Power Matching and Calibration Simulation of Pure ElectricVehicle
DING Zhou-bo,LI Bin,LI Chen-xu,ZHANG Jun-hao
(Zhongyuan University of Technology,Zhenzhou 450007,China)
Taking a pure electric vehicle as an example,according to the requirements of the basic technical parameters and design,establish mathematical model and matching of the car’s motor and battery parameters,using MATLAB simulation analysis,the dynamic performance results show that the reasonable matching of the dynamic parameters,to meet the requirements of electric vehicle.
MATLAB;pure electric vehicle;parameter matching;simulation analysis
U469.72
A
1672-545X(2017)10-0006-03
2017-07-30
河南省高等学校重点科研项目计划(17B120003)
丁舟波(1974-),男,浙江舟山人,讲师,博士,主要研究方向为新能源汽车及电池SOC分析。
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
汽车维修与保养(2021年8期)2021-02-16
动漫星空(兴趣百科)(2019年3期)2019-03-07
上海师范大学学报·自然科学版(2018年3期)2018-05-14
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
科技创新与应用(2016年36期)2017-02-21
中国新技术新产品(2017年2期)2017-01-20
海外星云(2016年17期)2016-12-01
汽车维护与修理(2015年5期)2015-02-28
