
基于水声通信的海洋水质多点监测系统设计
2017-12-27 08:35赵杰王志惠力朱洪海杨俊贤初士博
大连海洋大学学报 2017年6期
赵杰,王志,惠力,朱洪海,杨俊贤,初士博
基于水声通信的海洋水质多点监测系统设计
赵杰,王志,惠力,朱洪海,杨俊贤,初士博
(山东省科学院海洋仪器仪表研究所,山东省海洋环境监测技术重点实验室,山东青岛266001)
为解决目前水质监测存在的单点测量、实时跟踪观测不及时、通信距离短和供电不便等问题,设计了基于水声通信的海洋水质多点监测系统。该系统主要包括浮标系统、坐底式水质监测系统、岸站实时数据接收系统。水质多点监测的下位机由浮标系统和海底多个坐底式水质监测系统组成;坐底式系统与浮标之间采用水声通信的方式实现水下数据上传,水声通信半径能达到10 km;以浮标作为中继系统,采用太阳能供电,利用DTU和北斗双通信将分钟数据实时传输,解决了诸多水质监测中现存的问题。研究表明,本系统数据实时上传率达到95%以上,能够满足大范围海域内水质多点实时监测的要求,可为水产养殖提供全天候有效可靠的水质参数。
水质监测;海上浮标;海底观测网;水声通信
在海洋水产养殖过程中,水域环境的优劣直接影响到鱼、虾、蟹、海参等海洋水产品质量的高低。随着渔业养殖规模的扩大、养殖种类的增多和养殖密度的增大,对盐度、pH、溶解氧、水温等水质参数实时监测的水平和要求不断提高。以往的水质监测,需租船到海上进行多点采样,将样品带回实验室进行分析后才能得到数据,监测周期长,成本高,投入了大量的人力物力,不能实时监测水环境动态变化。目前正在研发中的国外水质监测系统,如美国Heliosware公司的EMNET系统和澳大利亚CSIRO公司的Fleck系统,通信速率低,体积大,成本昂贵[1]。国内的水质监测系统研究,如刘兴国等[2]提出的基于水质监测技术的水产养殖安全保障系统和王骥等[3]设计的基于无线传感器网络海洋环境监测系统,实现了水质多参数实时传输,但这两种系统需要市电供电,不能实现对大范围多层水质参数测量的要求,只适合单层面近海观测,而对于远海测量不适用。
本研究中以海底和海平面水质监测为目标,设计了海洋水质多点检测系统,分别测量海平面和海底多点水质参数,并且实现深远海的数据传输,旨在为水产养殖提供实时准确的水质参数。该系统采用海洋浮标挂载manta2水质传感器的方式实现海平面水质参数的测量,利用坐底支架挂载水声modem、水下密封舱和水质传感器构成的水下水质参数采集系统,实现海底水质参数的测量。水下采集系统与海洋浮标间通过水声modem进行数据通信传输。海洋浮标可实现与多个水下采集系统进行通信,通信半径可达到10 km。海洋浮标系统作为网关浮标,使水下数据可以穿过海面,实现水面与水下立体网络通信观测。以浮标挂载DTU和北斗卫星双通信的方式实现数据近远海上传。
1 系统架构
水质监测系统主要包括3大部分:岸站数据接收终端、海洋浮标中继采集传输系统和坐底式水质数据监测系统。海底传感器节点与海洋浮标水下进行声学组网通信,海洋浮标系统将海底传感器节点数据汇总后,通过CDMA网络和北斗卫星将数据传送到岸站接收软件。岸站接收软件对接收数据进行显示、存储、分析和报警,实现水质参数的实时监控[4]。系统示意图如图1所示。
1.1 海洋浮标中继采集传输系统
海洋浮标作为海底水质数据上传的中继载体,是整个水质监测系统的关键。浮标系统主要包括中央处理采集器、水声modem、多参数水质传感器manta2、北斗、GPS、罗盘、DTU(CDMA)、太阳能供电系统。其中,水声modem的作用是实现与坐底式水质数据监测系统进行数据通信[5];多参数水质传感器实现海平面水质数据的测量;CDMA、北斗双通信能够解决近远海数据通信上传问题;GPS实现浮标的定位功能,防止浮标跑丢;太阳能供电系统,能够实现浮标系统在海上长时间供电;中央处理采集器将数据采集整理后进行存储,并通过双通信向岸站数据接收终端发送数据;岸站接收终端可随时调取中央处理器存储的数据。
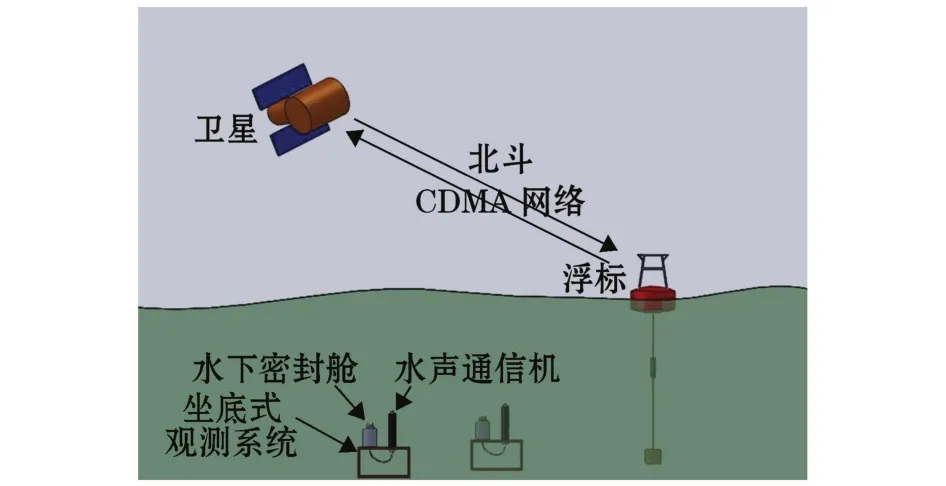
图1 系统结构示意图Fig.1 Flow diagram of the system structure
1.2 坐底式水质数据监测系统
坐底式水质数据监测系统主要包括水下支架、水质传感器manta2、水下密封舱和水声 modem。水下密封舱内包括电池系统和中央数据处理模块。水下密封舱内的电池可保证系统供电,连续供电周期为3个月;水下密封舱内的中央处理模块可以实现海底水质数据采集和通信;水质传感器实现海底水质参数测量;水声modem实现与浮标中心端水声modem的数据链路通信;水质传感器、水下密封舱和水声modem水下的耐压可达100 m水深。
2 硬件电路设计
2.1 测控电路设计
水质监测系统的测控电路设计包括海上浮标系统和海底水质观测点两部分。两部分电路采用的中央处理芯片、水质传感器、声学收发系统、罗盘是一致的。海上浮标系统与海底观测点的不同在于供电系统、通信和卫星定位。前者采用的是太阳能充电系统,能实现网络和北斗卫星双通信,并挂载GPS实现定位功能。后者采用锂电池供电,只能通过水声modem实现通信功能。测控电路设计框图如图2所示。
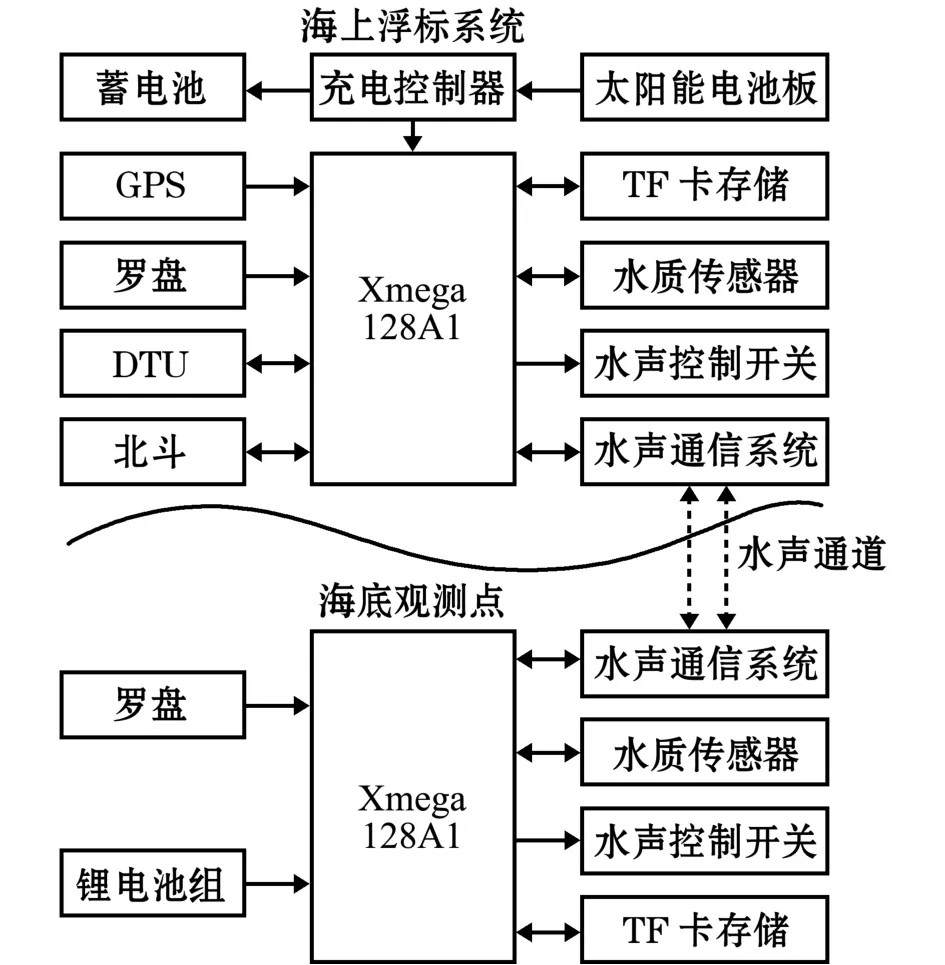
图2 测控电路设计框图Fig.2 Measurement and control circuit diagram
太阳能供电系统主要由8块太阳能电池板、8块12 V/100 Ah蓄电池和太阳能充电控制器组成。测控电路中央处理芯片采用AVR公司生产的高性能、低功耗的8位微处理器Xmega128A1,供电电压范围为1.6~3.6 V,操作速率最高可达32MIPS,具有128 K的片内自编程Flash、4 K的内部E-2PROM、8 K的内部SRAM、4路DMA控制器、8通道缓冲串行端口、8个16位通用定时器、8通道事件处理系统、4个两线通信接口兼容I2C与SMBUS协议、4路SPI外部通信接口,2路8通道12位A/D转换器和2路2通道12位D/A转换器,具有内部独立可编程看门狗。12位的A/D采集电路可采集0~12 V电压信号和4~20 mA的电流信号。1路开关量控制水声modem的开关电。1路RS422通信接口连接北斗,5路RS232分别连接水声modem、水质传感器、GPS、罗盘和DTU。系统的数据存储通过SPI接口连接TF卡实现。
2.2 水声通信电路设计
为了现场维修维护方便,保证水声通信系统相对独立性,需要单独设计具有透传功能的水声通信机。该通信机可直接与串口设备相连接,实现数据收发功能。
为降低设备处理预算功耗,提高通信准确率,实现数据透传功能。本研究中选用ADI公司的低功耗16位定点DSP芯片ADSP-BF548和ADSPBF561[6]。采用双DSP硬件结构模式既利于电路硬件设计与调试,也方便软件编程设计。ADSP-BF561拥有双处理内核,用于水声通信信号处理,实现水声调制解调的功能。ADSP-BF548外围资源丰富,担当设备的主控单元,可实现数据的缓存、存储与透传功能。水声通信机的结构框图如图3所示。
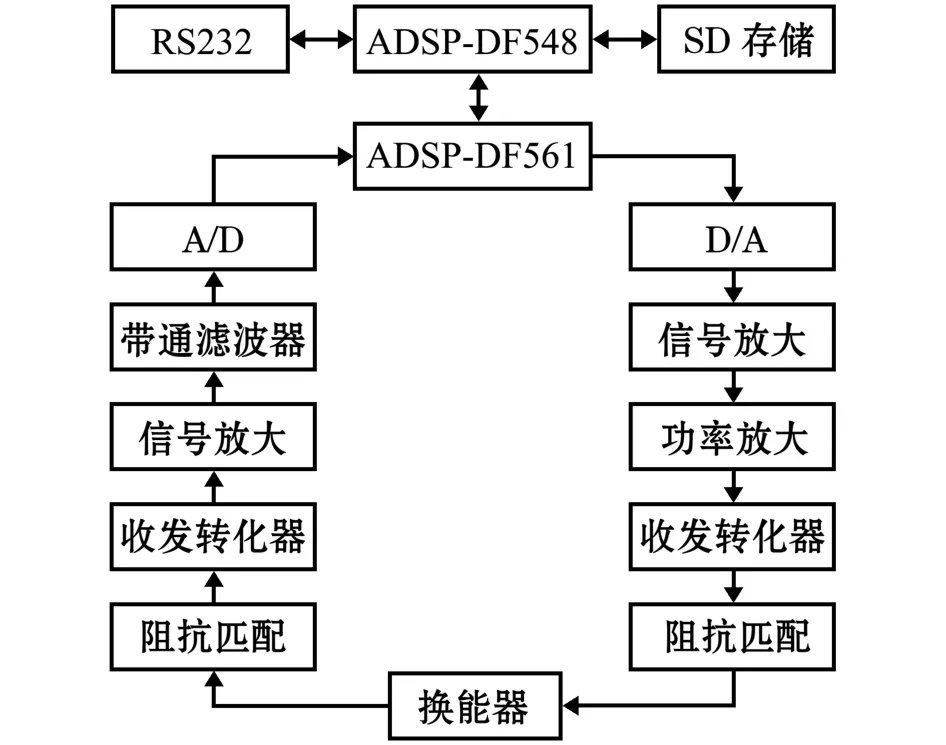
图3 水下通信机结构框图Fig.3 Flow diagram of the underwater communication machine
3 软件设计
水质监测系统软件设计主要包括监测系统下位机、岸站接收上位机和水声通信链路3部分。
3.1 监测系统下位机软件设计
监测系统下位机软件主要包括以下几个步骤:
(1)系统初始化。系统上电后,对系统时钟、串口、TF卡存储接口、A/D模块、系统时钟等进行初始化检测配置,等待接收命令。
(2)传感器数据接收。主控芯片通过串口发送命令,启动传感器数据采集。传感器启动后,串口等待接收传感器采集数据。
(3)数据整合存储和发送。系统将采集的电池电压、传感器数据、GPS数据、罗盘数据等整合成一帧数据,数据帧包含帧头、帧尾和数据校验位[7]。
(4)接收岸站上位机软件指令。等待上位机软件发送命令,命令帧也包括帧头、帧尾和数据校验位。上位机的命令包括调取、时间校正和误差数据校准等。
下位机软件流程图如图4所示。
3.2 岸站接收上位机软件设计
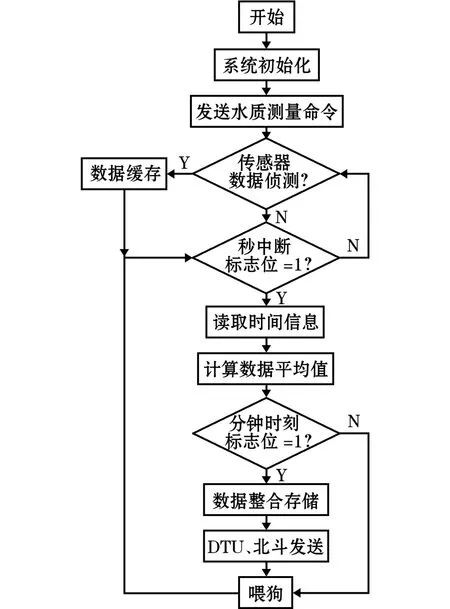
图4 监测系统下位机软件流程图Fig.4 Lower computer software flow chart of the monitoring system
岸站接收软件包括实时曲线显示功能区、水质参数实时显示区、浮标中心监控区域、下位机电池电压和时间区域、功能选项区和GPS功能定位区域。在软件的功能区域,可选择实时监控界面、历史数据查询界面、通信调取界面、时间校准、系统配置和Excel制表功能;在水质参数的实时显示区域,可以观察水质各项参数数据;在实时曲线区域,可以观察曲线的连续性;在浮标中心监控区域,可以观察浮标偏离中心点的距离。此外,该软件可读取下位机上传数据时间和电池电压,同时实时显示GPS定位数据。岸站接收上位机软件界面如图5所示。
3.3 水声通信软件设计
水声通信系统主要分为相干和非相干两种方式,前者要求发送信号与接收信号的相位和频率之间存在预定关系,而后者则没有这方面要求,因此,在数字信号处理方面,非相干通信系统比相干通信系统要简单,本研究中采用非相干方式进行调制解调。
3.3.1 发送端信号调制 水声通信发送端采用非相干的频移键控 (FSK)调制方式。FSK调制只和频率有关,与相位无关,能减少码间干扰,抗干扰能力强,设计简单,稳定性高,但是FSK的频带利率低,声道带宽有限,只适合于低速率传输。为保证有限带宽内提髙传输速率,采用MFSK多进制频率调制的方式。由于通过水声传输信息量较小,采用3FSK调制方式完全满足监测系统要求。
MFSK多频调制方式是用多种不同的载波频率代表多种数字信息[8]。3FSK调制是每个字节由3种不同频率的正弦信号表示。每个字节的最前端加12 kHz的正弦波作为同步信号,数据码用9 kHz的正弦波表示二进制0,用11 kHz的正弦波表示二进制1。发送信息模式如图6所示。
为减少码间干扰,数据码发射时间间隔为5 ms,每个数据码周期长度为5个正弦周期,数据码发送间隔长,数据码周期短,码元间留有足够间隔给多途信号,码元发送时间间隔就是保护时间。
3.3.2 接收端信号解调 按照上述水声信道的通信特点,为降低多途信号干扰,发射端并不是连续的发射码元信息。另外,为了提高波特率,减小了保护时间和码元周期。这些做法均降低了通信性能,因此,接收端的处理运算能力对于整个系统的通信性能提高至关重要。
为提高接收端信号处理速率,采样信号通过离散Hilbert变化将原始信号从频带变化到基带[9],产生解析信号,这种方法可降低采样速率,减少运算量,提高信噪比,实现锐截止滤波器的功能。本研究中通过第三类相位FIR滤波器实现Hilbert变化。
解析信号通过FFT运算得出多普勒频率的偏移量和码元信息。多普勒偏移量实现接收信号频率补偿功能。码元信息经过解码以后由Viterbi算法进行译码输出。用FFT进行256点处理,AD采样频率为100 kHz,因此,得到频谱最小间隔100 000 Hz/256=390 Hz,能够满足通信系统接收端对频率分辨率的要求。接收机信号处理流程如图7所示。
4 系统验证结果
2013年3月,该水质监测系统在某海域成功布放,实现了海域内多点水质参数测量、数据实时上传、数据调取和数据校正,以及24 h全天连续监测等功能。该系统连续工作时长近3年,达到渔业养殖部门对水质监测数据连续、稳定、准确观测的要求。坐底式系统布放水域水深为20 m。浮标和坐底式系统布放实物图如图8所示。
系统软件会自动生成水质数据实时观测曲线,并对数据进行存储。历史数据如图9和图10所示。
将2016年10月2日10:00—11:00时间段内海面、海底实时监测的水质平均数据与人工采样后的实验室测量数据进行对比分析,结果如表1和表2所示。

表1 海面与实验室采样数据的比对 (10:00—11:00)Tab.1 Comparison of data(10:00—11:00)collected from sea surface and a laboratory
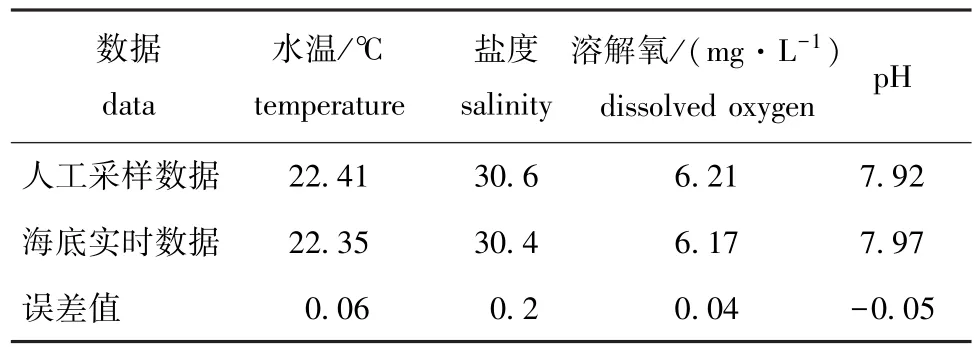
表2 海底与实验室采样数据的比对 (10:00—11:00)Tab.2 Comparison of data(10:00—11:00)collected from sea bottom and a laboratory
将2016年10月2日11:00~13:00时间段内海面、海底实时监测的水质平均数据与人工采样后的实验室测量数据进行对比分析,结果如表3和表4所示。
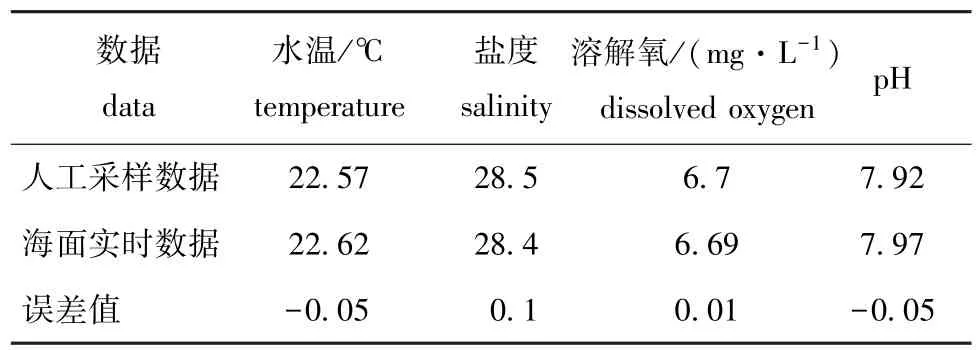
表3 海面与实验室采样数据的比对 (11:00—13:00)Tab.3 Comparison of data(11:00—13:00)collected from sea surface and a laboratory
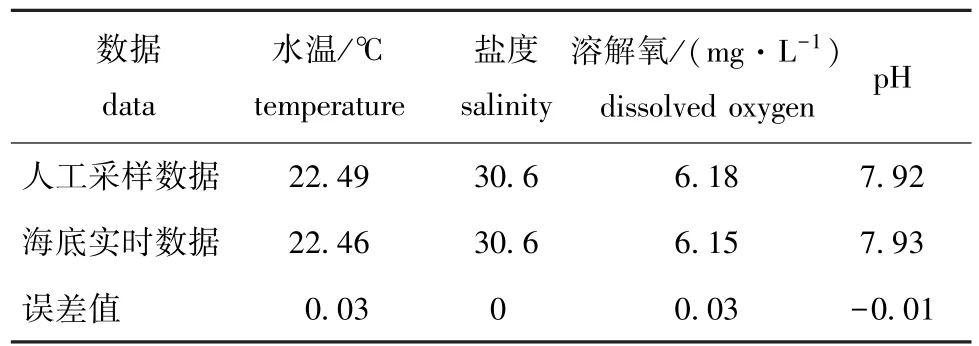
表4 海底与实验室采样数据的比对 (11:00—13:00)Tab.4 Comparison data(11:00—13:00)collected from sea bottom and a laboratory
由上述3个小时的对比数据可以看出,通过该水声通信的海洋水质多点监测系统获得的水质数据与实验室的采样测量数据相差并不明显,该系统采集的数据具有一定的代表性和可靠性。
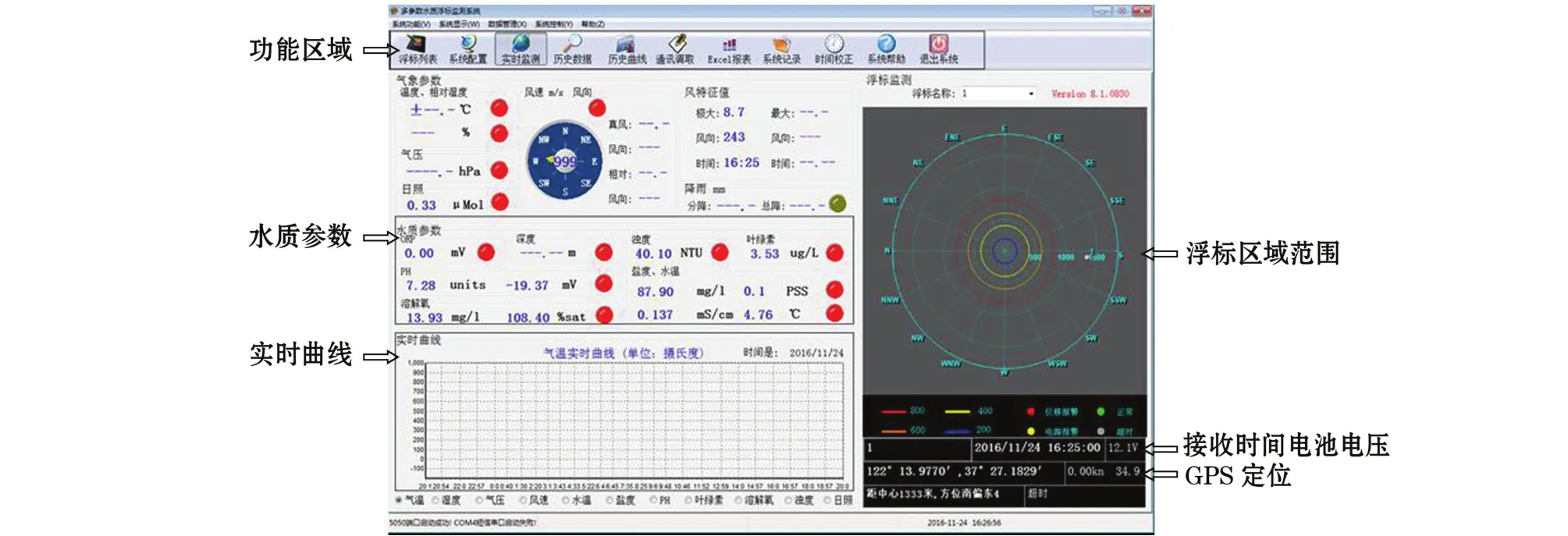
图5 岸站接收上位机软件Fig.5 Receiving software from shore stations

图6 发送端信息调制Fig.6 Sending information modulation
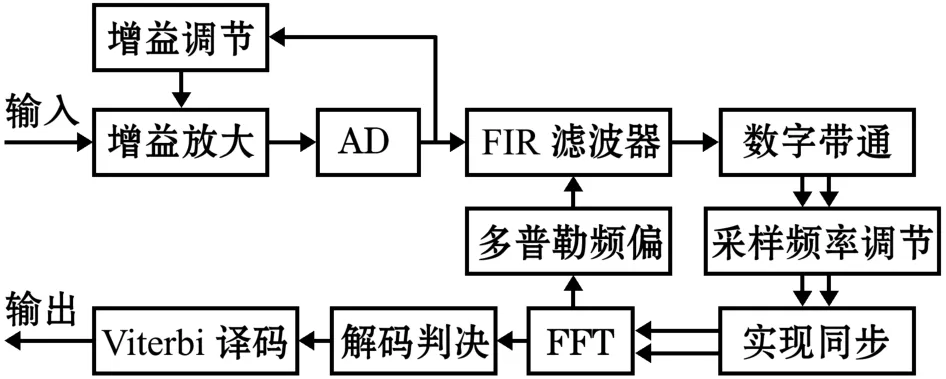
图7 接收机信号处理流程图Fig.7 Flow chart of receiver signal processing

图8 浮标和坐底式系统布放实物图Fig.8 Physical chart of buoy and bottom mounted system
5 结论
综上所述,利用浮标和坐底式系统组成的水质监测系统能够实现海面与海底多点水质数据实时连续测量,并得到可靠有效的数据,完全可以替代人工海上采样作业。系统主要解决了下列4个问题:
(1)实现海平面和海底多点水质参数同时测量,主要参数有盐度、pH、水温、溶解氧。
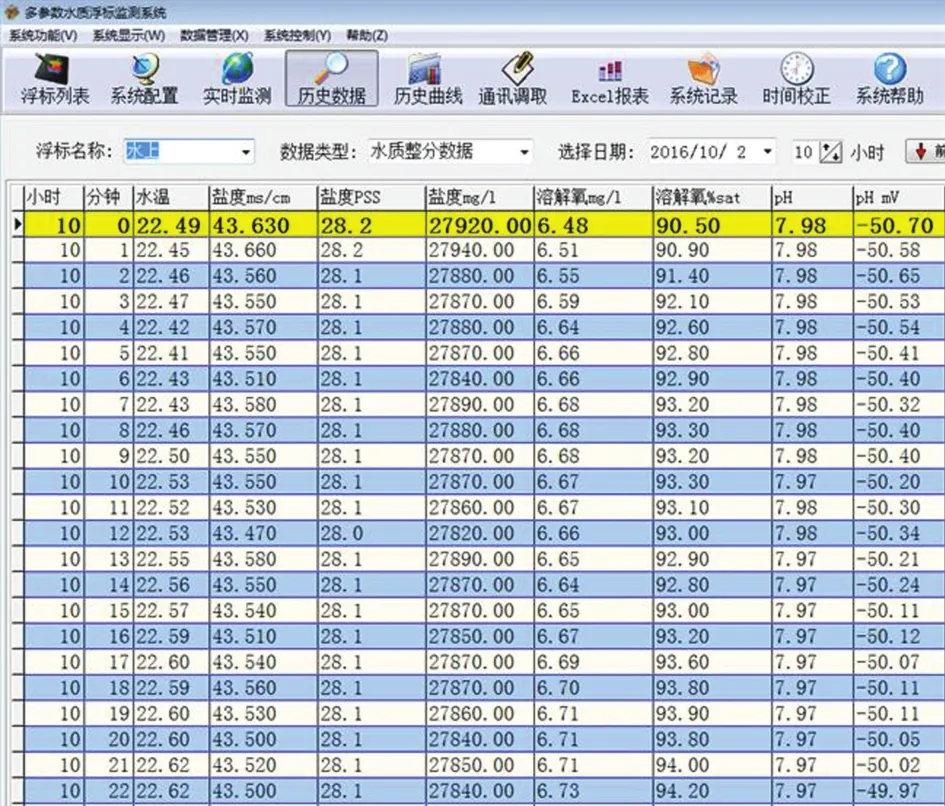
图9 海上浮标水质观测数据Fig.9 Water quality observation data from a marine buoy
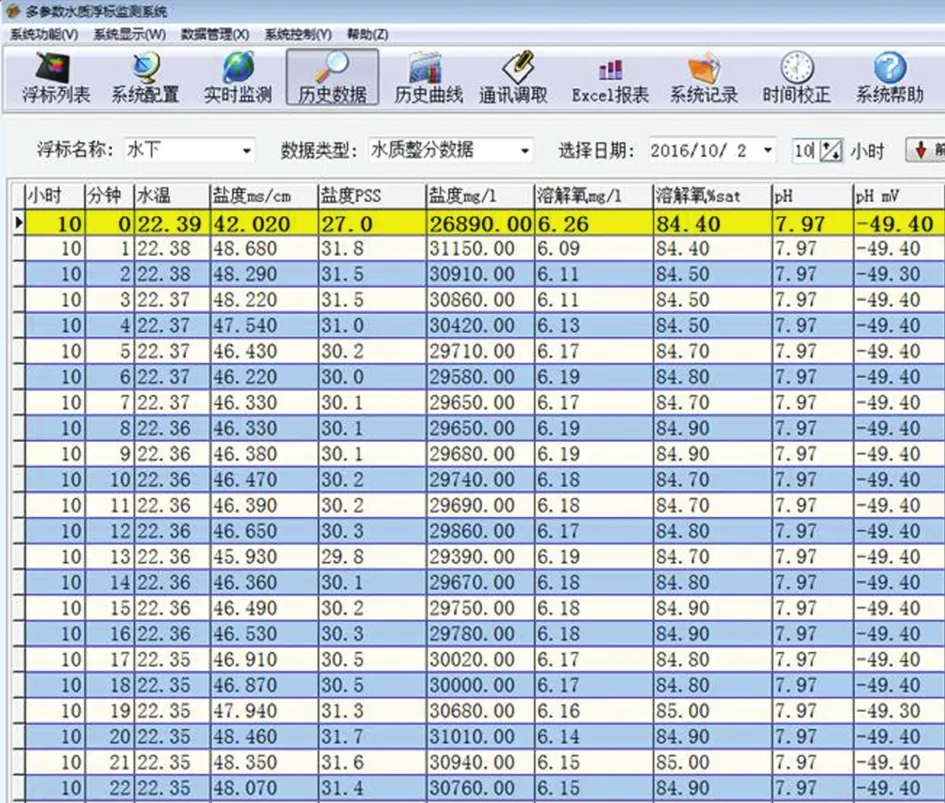
图10 坐底式系统水质观测数据Fig.10 Water quality observation data from a bottom sitting system
(2)实现水声modem一对多点通信,建立水面与水下立体网络通信,保证海底观测多点布放测量,海底布放点离中心接收点间的距离半径可达到10 km。
(3)浮标采用太阳能供电系统,保证浮标系统长久持续供电,不受市电的限制。
(4)采用CDMA和北斗卫星双通信,可实现近远海实时通信。
本系统设计方法可在海洋水质参数观测设备中进行广泛地推广和应用,特别是在多层测量和深远海水质监测方面具有一定的参考价值。
[1] 黄建清,王卫星,姜晟,等.基于无线传感器网络的水产养殖水质监测系统开发与试验[J].农业工程学报,2013,29(4):183-190.
[2] 刘兴国,刘兆普,王鹏祥,等.基于水质监测技术的水产养殖安全保障系统及应用[J].农业工程学报,2009,25(6):186-191.
[3] 王骥,周文静,沈玉利.基于无线传感器网络的海洋环境监测系统研究[J].计算机工程与设计,2008,29(13):3334-3337.
[4] 王玉庆,胡慧敏,石建华.渔业养殖水中溶解氧的无线检测系统研制[J].电子技术应用,2015,41(3):75-77.
[5] 严丽平,宋凯.基于ZigBee与GPRS的嵌入式水质监测系统设计[J].计算机工程与设计,2011,32(5):1638-1640,1852.
[6] 周建清,郭中源,贾宁,等.无线/水声通信浮标技术研究及其实现[J].应用声学,2012,31(6):445-455.
[7] 于海滨,袁玖一,李官保,等.基于ARM Cortex-M3/M4的海底多模式测控系统研制[J].电子技术应用,2016,42(7):64-67.
[8] 苇周芳,黄建国.基于MFSK的多载波水声通信系统及实验研究[J].无线通信技术,2006,15(2):9-13.
[9] 李枫,黄瑞光.一种FSK水声通信信号的设计与接收处理[J].声学与电子工程,2004(1):8-10.
Design of a marine multi-point water quality monitoring system based on underwater acoustic communication
ZHAO Jie, WANG Zhi, HUI Li, ZHU Hong-hai, YANG Jun-xian, CHU Shi-bo
(Shandong Provincial Key Laboratory of Ocean Environment Monitoring Technology, Institute of Oceanographic Instrumentation, Shandong Academy of Sciences, Qingdao 266001, China)
A multi-point monitoring system for marine water quality was designed based on underwater acoustic communication in order to solve the problems of single point measurement, and real-time tracking and observation,short communication distance and inconvenient power supply.The system is primarily comprised of buoy system,water quality monitoring system of sitting style,and real-time receiving system of shore station.The lower system of water quality multi-point monitoring includes the buoy system and multiple water quality monitoring system of sitting style,and the underwater data communication between underwater system and buoy is realized by underwater acoustic communication,whose radius can extend to 10 km.Buoy as a relay system powered by solar energy uploads minutes data by double communication of DTU and the Beidou,dealing with the issues of short communication distance, power supply inconvenience, and untimely observation.Shore station receiving software acts as displaying minutes of data, formatting the curve, and saving the data.The system with more than 95%data upload rate can meet the requirements of a wide range of water quality multi-point monitoring in real-time, and provide aquaculture with effective and reliable water quality parameters all day.
water quality monitoring; sea buoy; submarine observation network; underwater sound communication
Q954.4
A
10.16535/j.cnki.dlhyxb.2017.06.017
2095-1388(2017)06-0747-06
2017-02-09
国家重点研发计划重点专项 (2016YFC1400403)
赵杰 (1983—),男,工程师。E-mail:zhaojie83@126.com
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
舰船电子工程(2021年5期)2021-06-04
垂钓(2019年2期)2019-09-10
建材发展导向(2019年10期)2019-08-24
当代水产(2019年1期)2019-05-16
当代水产(2019年3期)2019-05-14
电子制作(2018年14期)2018-08-21
电子制作(2017年22期)2017-02-02
