
足球机器人场地图像信息特征的提取
2017-12-20 01:53沈昱明
电子科技 2017年12期
许 信,沈昱明
(上海理工大学 光电信息与计算机工程学院,上海 200093)
足球机器人场地图像信息特征的提取
许 信,沈昱明
(上海理工大学 光电信息与计算机工程学院,上海 200093)
中型组足球机器人比赛中,要求机器人对足球场地的特征信息能够快速地识别和提取,并且转化为决策信息。针对这一要求,文中基于颜色RGB分量分割、Sift特征点匹配算法、区域增长算法,提出了一种智能控制算法对所获取的图像进行处理和信息特征提取,并将图像识别的结果标识出来。利用Matlab/GUI对整个图像处理和特征信息识别进行了仿真,结果表明,该算法能够实现对足球场地特征信息的提取和标识。
足球机器人;图像处理;特征提取;图像分割;目标识别
中型组足球机器人比赛中,比赛场上特征信息的提取至关重要,信息的准确性将直接影响到足球机器人的决策和比赛胜负[1]。文献[2]中提出了一种图像拼接技术,以获得完整的场地周围信息,将提取特征点后的图像利用插值法进行融合,并用Canny算法提取边缘线,实现对图像中特征信息的提取。
中型组足球机器人比赛中场地环境比较复杂,而准确地获取场地信息是比赛获胜的关键[3],为此提出了一种改进的图像处理算法,该算法采用图像分割技术和信息特征提取技术。在图像获取部分,通过中型组足球机器人上的全景摄像头将场地周围拍摄下来;在图像预处理部分,通过高斯滤波算法、图像增强方法等对所获得的图像进行预处理;在特征提取部分对图像抽象化;在识别部分对图像特征进行RGB颜色分量分割算法、Sift特征点匹配算法及区域增长法等进行处理,最终在图像中提取出要识别的目标[4-6]。足球机器人获取了这些特征信息才能够及时准确地做出相应决策,并取得好的比赛成绩。
1 总体设计方案
中型组足球机器人通过顶端的全景摄像头将场地图像拍摄下来,由传感器传送到计算机上,然后在图像处理中通过高斯滤波、边缘检测及膨胀与腐蚀等预处理之后,对图像上的信息进行特征提取。
对场地、球门、球等特征识别采用颜色RGB分量分割的方法进行提取;足球场上的白色边线采用高斯滤波、边缘增强后用区域生长的方法来进行提取;对于场地上的机器人,通过Sift特征点匹配的方法对其进行特征提取[7]。
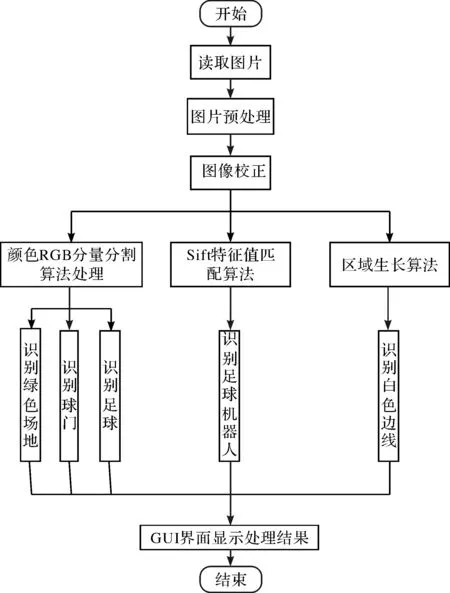
图1 设计方案流程图
2 彩色图像的预处理
由于足球机器人全景摄像头所获得的图像叠加了噪声[8],图像存在偏色、对比度低等缺陷。为了提高获取图像信息特征的精度,在进行图像识别之前,首先对图像进行预处理,目的是改善图像质量,为图像识别和特征信息提取提供条件,使得图像特征提取效果更佳。
2.1 高斯滤波
高斯滤波是一种线性平滑滤波,适用于消除高斯噪声。为了滤除原始图像中的噪声,建立高斯函数模型如下
Idouble = im2double(img_gray);
II = imfilter(Idouble,fspecial('gaussian',[3 3],0.95));
Iedge = edge(II,'canny');
通过述程序,先将img_gray图像转换为双精度型,通过fspecial函数建立一个高斯滤波器,由imfilter函数对采集到的图像中的高斯噪声进行滤除,使得处理后的图像更平滑。边缘检测是图像分割的基础,在对图像进行高斯滤波后,再利用edge函数实现对图像的边缘检测[9-11]。
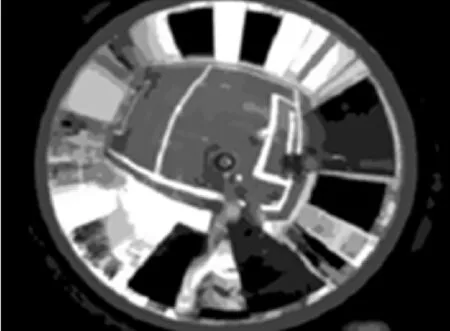
图2 高斯滤波图像

图3 边缘检测图像
2.2 图像增强
图像增强部分采用对滤波图像进行膨胀和腐蚀,目的是改善图像的视觉效果,使得图像更加平滑,改善图像的边缘效果,建立图像增强函数如下
function [ region ] = pretreatment( img_gray )
Idouble = im2double(img_gray);
II = imfilter(Idouble,fspecial('gaussian',[3 3],0.95));
Iedge = edge(II,'canny');
B=[0 1 0 1 1 1 0 1 0];
Iedge1=imdilate(Iedge,B);
Iedge2=imerode(Iedge1,B);
region = II + Iedge2;
end
3 图像信息特征提取的基本原理
根据目标的颜色特征,对场地、球门、球通过颜色RGB分量分割法进行提取[12],白色边线采用区域生长法,足球机器人通过Sift特征点匹配方法分别进行特征提取。简单而言该算法通过图像采集、图像分割、目标识别,最终对足球场地特征信息进行识别提取。
3.1 颜色RGB分量分割原理
彩色图像中的每个像素由红(R)、绿(G)、蓝(B)三基色按照一定比例组合表示。通过线性或非线性变换可以从三基色计算出色调、饱和度、亮度等各个彩色特征。对于彩色图像不同的分割目的,可以选用不同的彩色特征组合[13],建立如下的分割函数。
for i = 1:M
for j= 1:N
if abs(image(i,j,1)-100)<35 && abs(image(i,j,2)-165)<40 && abs(image(i,j,3)-140)<45
image(i,j,1) = 255;
image(i,j,2) = 0;
image(i,j,3) = 0;
end
end
end
imshow(uint8(image ));
当像素中红(R)的值在65~135且绿(G)的值在125~205且蓝(B)的值在95~185时,符合条件的像素点都为绿色场地部分,并用 image(i,j,1) = 255;image(i,j,2) = 0;image(i,j,3) = 0; 将识别出来的绿色场地用红色标注出来。由RGB分量分割法,用image(i,j,1) = 255;image(i,j,2) = 255;image(i,j,3) = 0;将识别的左球门,用黄色标注出来。用image(i,j,1) = 0;image(i,j,2) = 0;image(i,j,3) =255;将识别出来的右球门,用蓝色标注出来。用biaoji(i,j) = 2;将识别的红色球标注出来。
3.2 sift算法特征点匹配的原理
用sift特征点匹配法对足球机器人识别,通过imread函数读取采集到的图片,将图像上取出来的特征点(关键点),通过siftMatch函数进行匹配,从而将其标识出来。
global im
boxImage = imread('ball0.jpg') ;
sceneImage = im ;
axes(handles.axes3);
[matchLoc1 matchLoc2] = siftMatch(boxImage, sceneImage)
3.3 区域增长算法的原理
对于场地中的白色边线识别,采用区域增长算法实现。首先读取出采集到的图像,然后将彩色图像转换为灰度图像,在(169,148)和(165,246)处分别撒下一颗种子,在规定阀值T为0.2的情况下,当领域与种子点差值的绝对值在0.2内时,则该点为增长点,将该点划入生长区域,当不在0.2之内时,则表示不满足生长,此时暂停生长,从而将足球场地的边线白色识别并标注出来。
image = im;
grayimage = rgb2gray(image);
[ region ] = pretreatment( image(:,:,1) );
axes(handles.axes7);
imshow(image);
J1 = regiongrowing(region,169,148,0.2 );
J2 = regiongrowing(region,165,246,0.2 );
J = J1+J2 ;
4 实验分析
为了更加直观清楚的展现整个图像处理和图像特征信息识别的过程,本文基于Matlab设计了GUI界面进行仿真实现。
4.1 GUI界面建立
GUI界面,主要用了6个命令按钮(Push Button)、6个Axes坐标轴对象、1个静态文本框(Static Text)、1个框架面板(Panel)、2个开关按钮(Toggle Button)等,其画面建立如图4所示。

图4 GUI界面图
4.2 GUI图形界面运行操作及结果
打开所编的M文件,运行程序,在跳出的GUI图形界面中点击导入图片按钮[14-15],即把要处理的图片读取出来,然后依次点击颜色分量识别场地按钮、颜色分量识别球门按钮、Sift匹配识别机器人按钮、区域生长识别白线按钮。运行后整个足球比赛场地上信息的特征提取已完成。GUI图形界面的运行如图5所示。

图5 仿真结果
根据图5所示的仿真结果可知,在设计的GUI界面中,通过界面中的按钮设置,可以清晰地看到这一系列算法对图像的处理过程和结果,左半边的图像输出区域依次显示的是机器人拍摄下的未经处理的足球场地原始图像、足球场绿色场地识别结果、足球门识别结果、Sift特征点匹配识别机器人结果、区域生长法识别场地边线结果及红色球的识别结果。在GUI界面实际运行的过程中,区域增长法识别场地白色边线的过程可以清晰的看到生长识别的整个动态过程。右半边的系统操作按钮分别对应着左半边的场地特征信息的识别结果图,并设计了清除和退出按钮,机器人比赛中摄像头采集并传送到计算机上的图片是一帧一帧的,通过导入的每一帧不同的图像来随时随地的识别出场地的特征信息及机器人当前所在的位置,每一帧图像识别完成后,由清除键清除处理完的这一帧图像,而当中型组足球机器人整场比赛完后,足球机器人不再需要对场地特征信息识别和提取,此时由退出键实现让足球机器人视觉系统暂停工作。整个足球机器人比赛场上信息的特征信息提取设计过程完全根据实际的比赛过程设计。从整个GUI界面的设计及各种控制算法的运用,以及最终的仿真结果可以看出:这一套由高斯滤波算法、图像增强算法等预处理后的图像,再由颜色RGB分量分割算法、Sift特征点匹配算法、区域增长法等控制算法对图像进行分割处理可以达到很好的特征信息识别和提取。
4 结束语
本文以中型组足球机器人比赛为研究背景,针对图像处理和图像特征信息提取设计了一种控制算法,通过高斯滤波算法、图像增强处理对原始图像进行预处理,提高了后期图像信息特征提取的精度,图像处理通过颜色RGB分量分割算法、Sift特征点匹配算法、区域增长法对预处理后的图像进行特征信息的提取。仿真结果表明,本文提出的控制分割算法不但理论上是可行的,而且可以很好的将图像中的特征信息进行标识,能够识别出球、球门、场地白线等特征,确定场地中机器人位置及方向,从而为比赛提供信息,符合足球机器人实际的比赛过程,具有较强的实用价值。
[1] 谢理训. RoboCup中型组足球机器人的图像识别研究[D].广州:广东工业大学,2009.
[2] 王亚东,雷国华,安波.一种仿人足球机器人视觉系统环境特征获取与识别方法[J]. 黑龙江工程学院学报,2013,27(2):68-71.
[3] 丘柳东.足球机器人目标识别与自定位研究[D].重庆:重庆大学,2011.
[4] 赵保华.基于足球机器人的图像处理与图像识别[D].兰州:兰州理工大学,2006.
[5] 刘祚时,胡发焕.足球机器人视觉图像的快速识别[J].计算机工程,2007,33(17):234-236.
[6] 何超.机器人视觉系统中的图像分割与目标检测[D].杭州:浙江大学,2003.
[7] 白利勇,黄鸿,赵增荣.基于RoboCup中型组足球机器人视觉图像识别的一种快速算法[C].北京:中国自动化学会青年学术年会,2003.
[8] 张洋.基于小波分解的计算机图像去噪算法[J].电子科技,2016,29(8):103-105.
[9] 曹爱增,石兴广,刘峰.机器人足球识别算法研究[J].济南大学学报:自然科学版,2006,20(3):235-237.
[10] 支玲玲,葛庆平,姬照中.边缘颜色匹配算法在计算机拼图中的应用[J].计算机工程与设计,2010,31(16):3705-3707.
[11] 丁亚男.基于图像分解的车牌定位算法[J].电子科技,2014,27(1):42-46.
[12] 何鑫,刘立柱.机器人足球视觉系统中的实时图像处理[J].微计算机信息,2005, 21(8):49-50.
[13] 郁浩,张荣福,程金光,等.基于图像处理的钢包标牌识别方法[J].电子科技,2016,29(1):94-97.
[14] 王巧花,叶平,黄民.基于Matlab的图形用户界面(GUI)设计[J].煤矿机械,2005(3):60-62.
[15] 李磊.基于Matlab GUI的数字图像处理系统设计[D].成都:成都理工大学,2012.
Feature Extraction of Image Information Based on Soccer Robot Field
XU Xin, SHEN Yuming
(School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
Middle Size League soccer robot, there is a require for robot that can identify and extract the characteristics information of football filed quickly, and change into decision information. For this requirement, this paper provide an intelligent control method that can process and extract the feature information for acquired image based on the colorRGBcomponent segmentation, the Sift feature point matching algorithm, the regional growth algorithm, and marking this results. Finally, the whole image processing and information feature identification are simulated by Matlab/GUI. The results show, this method can extract feature information and mark the results for football filed.
soccer robot; image processing; feature extraction; image segmentation; target recognition
2017- 02- 22
国家自然科学基金(61603257)
许信(1989-),男,硕士研究生。研究方向:电子电路及数字图像处理。沈昱明(1960-),男,教授。研究方向:流量测量技术及智能测控技术。
10.16180/j.cnki.issn1007-7820.2017.12.030
TP391.41
A
1007-7820(2017)12-114-04
猜你喜欢
小天使·二年级语数英综合(2019年4期)2019-10-06
电子制作(2019年15期)2019-08-27
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2019年6期)2019-07-22
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年19期)2018-11-14
电子制作(2018年18期)2018-11-14
自动化学报(2017年11期)2017-04-04
电气化铁道(2016年4期)2016-04-16
电影故事(2015年16期)2015-07-14
