无刷直流电机控制系统仿真比较
2017-12-19 03:43程启明
上海电力大学学报 2017年5期
程启明, 徐 进
(上海电力学院 自动化工程学院, 上海 200090)
无刷直流电机控制系统仿真比较
程启明, 徐 进
(上海电力学院 自动化工程学院, 上海 200090)
无刷直流电机(BLDCM)是一种多变量、非线性的控制对象,PID 控制等传统控制方法难以达到现代工业控制高精度和高性能的要求.以BLDCM作为研究对象,介绍了BLDCM的结构原理,给出了基于传统PID、模糊PID和神经网络PID 3种BLDCM控制系统结构,并在Matlab/Simulink仿真平台上比较了3种BLDCM调速系统的性能.仿真结果表明,模糊PID控制系统的性能相对最优.
无刷直流电机; PID控制; 模糊PID控制; 神经网络PID控制
由于无刷直流电机(Brushless DC Motors,BLDCM)既具备交流电机结构简单、运行可靠、维护方便等一系列优点,又具备直流电机运行效率高、无励磁损耗以及调速性能好等诸多特点,故在当今国民经济各个领域的应用日益普及[1].
BLDCM系统是一个强耦合、多变量、非线性的系统,传统 PID控制[2-4]已经不能满足现代工业控制中对电机的控制精度和性能要求.近年来发展起来的智能控制理论已逐渐成熟,并开始应用在电机控制中.传统PID控制策略很难达到系统的动静态特性指标,若要使PID控制取得较好的控制效果,就必须通过调整好比例(P)、积分(I)、微分(D) 3种控制作用,形成控制量中既相互配合又相互制约的关系,这种关系不是简单的线性组合,需从变化无穷的非线性组合中找出最佳.模糊逻辑和神经网络都具有任意的非线性表达能力,常规的模糊逻辑或BP神经网络与传统PID相结合组成的模糊PID或神经网络PID控制器是一种很好的组合方式.
模糊PID控制[5-8]通过比较人类专家控制经验,具有对于非线性、复杂对象的控制更好的控制性能,模糊PID可以在线修正PID控制的参数,其控制性能要优于PID控制.
反向传播(Back Propagation,BP)网络PID控制[9-10]的输出参数是通过BP网络不断地在线学习,且权值系数的不断调整使系统运行的稳定状态在通过某种最优的控制规律下输出而达到.
本文将传统PID,模糊PID,神经网络PID 3种控制方式分别用于BLDCM的控制中,并通过仿真软件来比较其控制性能.
1 BLDCM转速控制系统结构
图1为BLDCM控制系统的原理框图.

图1 BLDCM双闭环系统原理示意
BLDCM控制系统采用双闭环控制,其中,外环为速度环,主要起稳定转速和抗负载扰动作用;内环为电流环(或转矩环),主要起稳定电流和抗电网电压波动的作用.首先,通过霍尔传感器测出无刷直流电机的转速信号,得出电机的定子相对于转子的位置信息,通过转速计算模块得出电机的实际转速;然后与给定的转速进行比较,误差信号会作为转速调节器的输入信号.其中,转速调节器是由PID控制器控制的,电流的参考信号为其输出的信号.由测量模块测出无刷直流电机定子电流信号,将其与输出信号比较后作为电流内环调节器的输入信号,通过其与三角载波信号对比产生脉冲宽度调制(PWM)信号,与电机的正反转信号进行逻辑与的运算后输入到驱动放大电路中,输出的数据作为逆变器功率开关管的输入,用以控制功率管的导通与关断,从而控制电机的转速.
2 模糊PID与神经网络PID的控制结构
图2为模糊PID控制系统的结构框图.模糊自适应PID控制系统以给定电压值和实际检测电压值的误差e和误差导数ec为变量输入,然后通过e和ec的关系来找出与PID控制器的比例、积分和微分3个控制参数之间的关系,并在线根据模糊控制原理来修正这3个控制参数,使其具有更好的动态和静态响应.
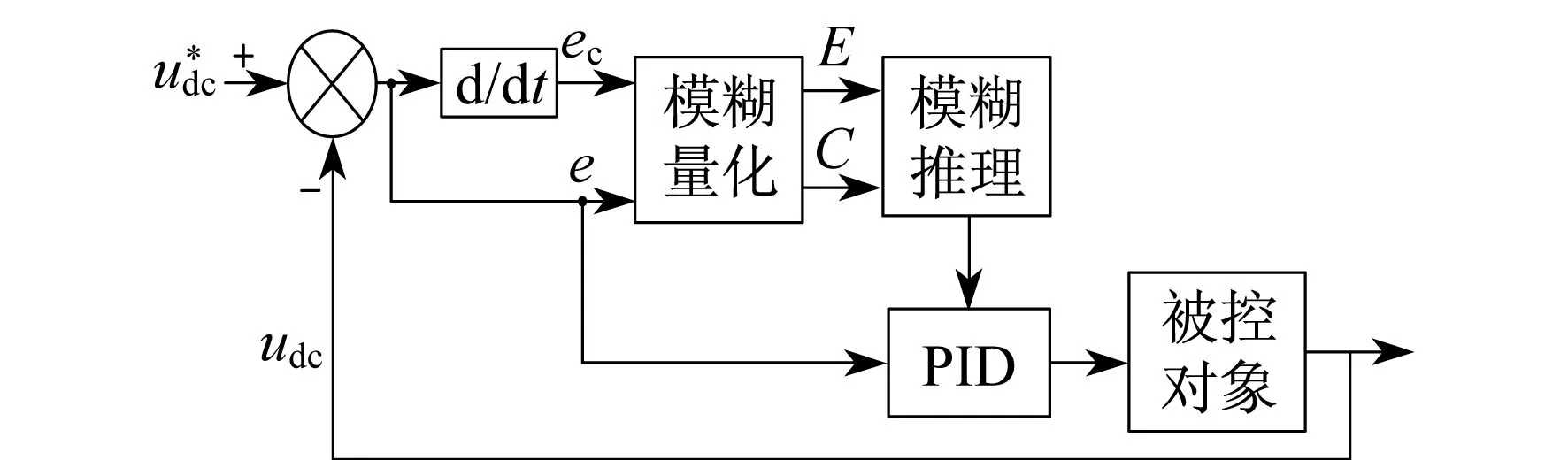
图2 模糊PID控制系统的结构示意
图3为神经网络PID控制系统的结构框图.神经网络PID控制系统主要由BP神经网络和传统PID控制器这两个部分组成.其中传统PID控制器的结构并无变化,但其控制参数(比例、积分和微分3个参数)不是固定不变的,而是通过BP网络在线整定,使其根据控制对象的运行状态而不断变化,从而使控制系统达到最优的控制性能指标,即BP网络的输出是PID控制器的3个控制参数,并通过BP网络不停地在线学习.

图3 神经网络PID控制系统的结构示意
3 BLDCM控制系统的仿真分析
本文在Matlab/Simulink软件平台上搭建了传统PID,模糊PID,神经网络PID 3种BLDCM控制系统的仿真模型,并进行仿真比较分析.图4,图5,图6分别为传统PID,模糊PID,神经网络PID这3种控制系统的仿真曲线.3种BLDCM控制系统都采用双闭环控制结构,由于内环控制器一般都设成跟随器形式,因此它们的内环都采用P控制,而外环控制起精确控制作用,因此它们分别采用传统PID,模糊PID,神经网络PID 3种控制方式.
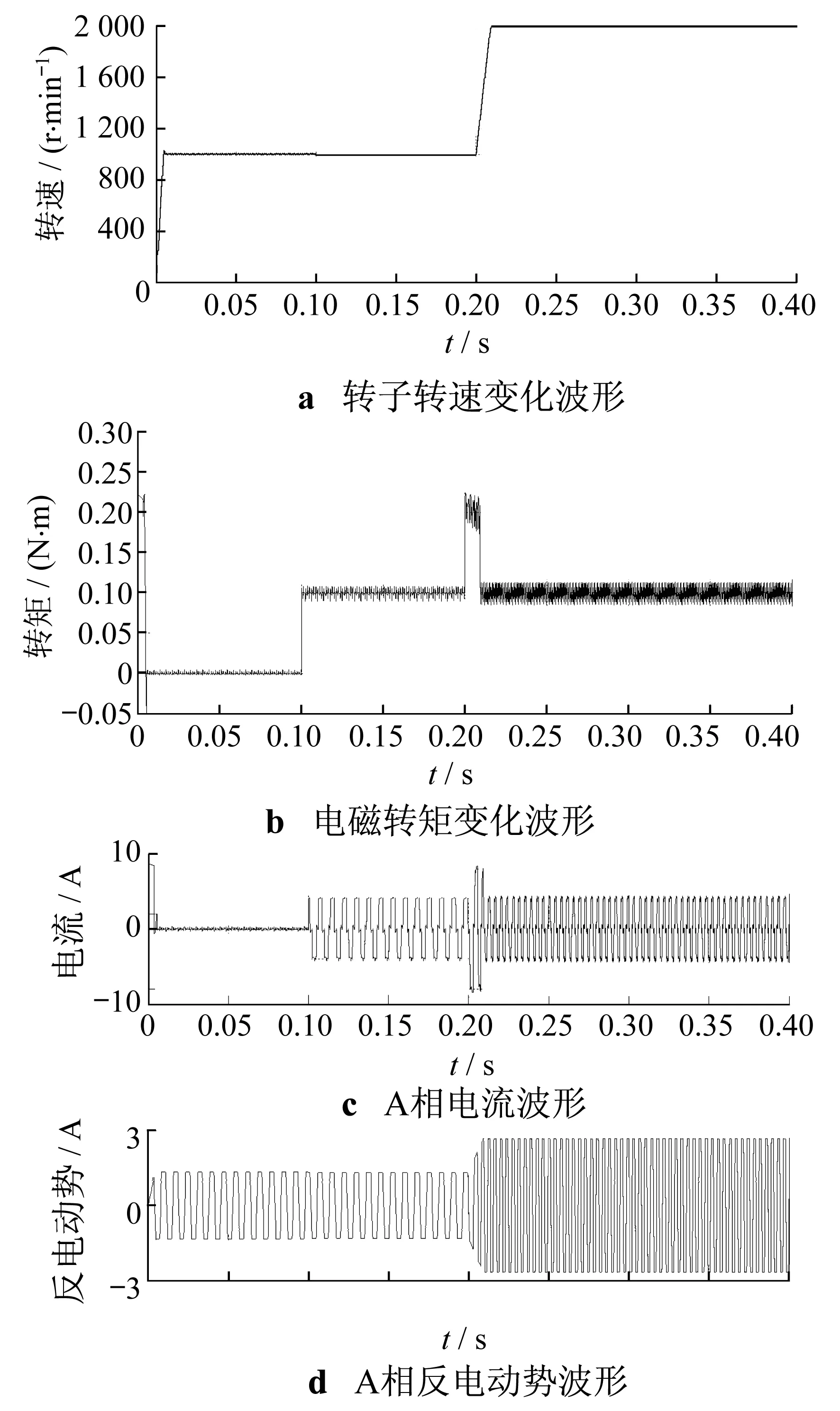
图4 BLDCM的PID控制系统仿真曲线
永磁无刷直流电动机的参数如下:定子绕组电阻为0.6 Ω,定子电感为0.2 mH;额定转速为2 000 r/min;反电动势系数为0.047 5 V/rad;转矩系数为0.453 6 N/A;转动惯量为9.25×10-6kg·m2;飞轮惯量为2.55×10-3N·m.
PID控制的参数如下:转速外环的比例参数为0.5,积分参数为0.15,抗饱和即限幅环节值为±2.3;内环电流环的比例参数为8,积分参数为5,抗饱和环节值为±12.
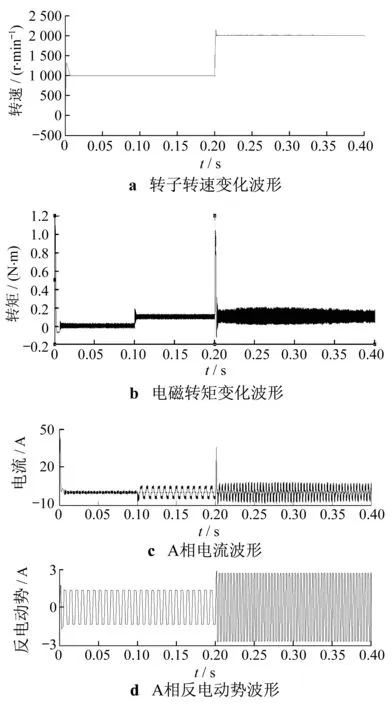
图5 BLDCM的模糊PID控制系统仿真曲线
3.1 PID控制系统仿真
由图4可见,仿真开始时,转子转速开始上升,同时由于转子加速,电磁转矩也不为零,同时与电磁转矩相关的电流也不为零,由于反电动势与转子转速有关,因此反电动势也开始慢慢增大;随后转子转速达到给定转速1 000 r/min,此时转速稳定不变,由于转子转速不变,则电磁转矩与电磁转矩相关的定子电流也变为零;当仿真运行到0.1 s时,与电磁转矩相关定子电流也增加到相应的值,此时由于转速几乎没有变化,与转速相关的反电动势也几乎没有变化;当仿真运行到0.2 s时,给定转速变为2 000 r/min,由于转子要加速,因此电磁转矩要大于负载转矩,电磁转矩变大,同时与电磁转矩相关的定子电流也变大,由于转子速度不断变大,与转速相关的定子反电动势也在变大,当转速达到2 000 r/min后,速度保持不变,此时电磁转矩和定子电流也变为与负载转矩对应的值,同时反电动势也保持不变.
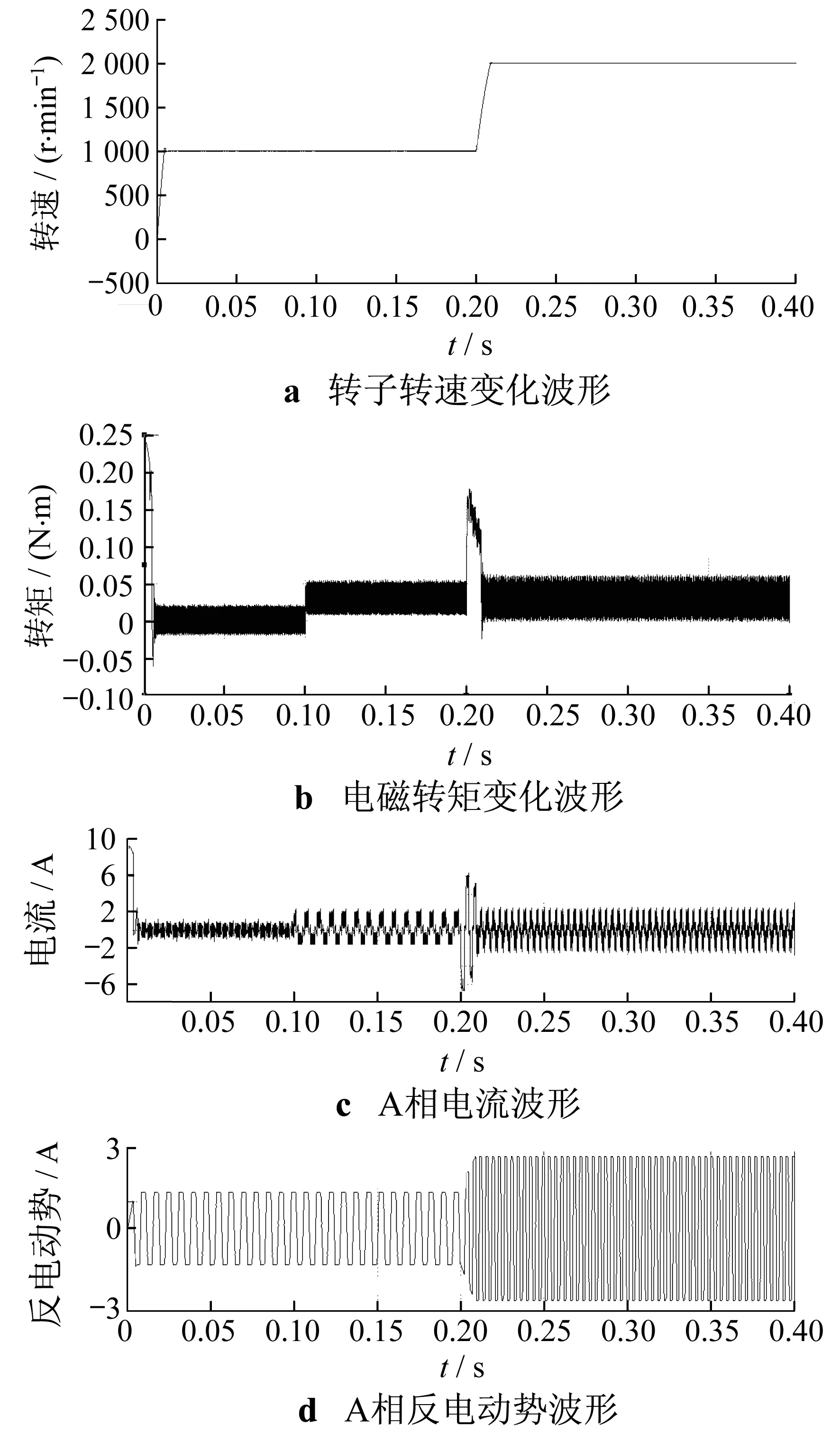
图6 BLDCM的神经网络PID控制系统仿真曲线
3.2 模糊PID控制系统仿真
电机运行变化情况与PID调速系统的波形基本一致,但由于模糊PID可以在线调整PID参数,比PID控制具有更好的动态性能.由图5可见,在电机启动期间,模糊PID控制系统转速上升到给定转速所用时间比PID控制系统更短;在仿真运行到0.1 s负载转矩发生变化时,模糊PID控制系统的转速基本没有变化,而转速有微小的变化;当仿真运行到0.2 s给定转速由1 000 r/min变为2 000 r/min时,转速变化时间更短.因此,相比于PID调速系统,BLDCM的模糊PID调速系统具有更好的调速性能.
3.3 神经网络PID控制系统仿真
由图6可见,相比于PID控制系统,神经网络PID控制系统的转速动态响应时间比较短,超调量几乎差不多;相对于模糊PID控制系统,其转速的动态响应时间略长,超调量较小.
经过大量仿真比较,3种控制系统的控制性能比较见表1.由表1可知,神经网络PID控制系统的总体性能好于PID控制系统,但比模糊PID控制系统的性能要差.

表1 3种控制系统的控制性能比较
4 结 语
本文主要研究了BLDCM转速控制系统的控制方法,并在Matlab/Simulink仿真平台上对PID控制、模糊PID控制以及神经网络PID控制3种BLDCM 控制系统进行了仿真比较.仿真结果表明,3种控制方法中模糊PID控制的性能指标(如超调量、响应时间、抗扰性、鲁棒性及PID整定)相对最佳.
[1] 夏长亮,方红伟.永磁无刷直流电机及其控制[J].电工技术学报,2012,27(3):25-34.
[2] 马晓爽,石征锦.基于Simulink的无刷直流电机双闭环调速系统仿真研究[J].制造业自动化,2016,38(7):82-88.
[3] 陈华锋,宋辉,王占强,等.一种改进的无刷直流电机控制方法[J].电机与控制应用,2015,42(1):28-35.
[4] 郭伟,郁雯雯,夏友亮,等.无刷直流电机转速控制策略仿真研究[J].计算机仿真,2015,32(9):372-376.
[5] 温嘉斌,麻宸伟.无刷直流电机模糊PI控制系统设计[J].电机与控制学报,2016,20(3):102-108.
[6] 焦仁雷,谈乐斌,潘孝斌.无刷直流电机模糊自适应PID的研究及仿真[J].机械制造与自动化,2014,43(6):93-97.
[7] 张鹏,贾洪平,王云财,等.模糊-PI无刷直流电机矢量控制系统实现[J].机电工程,2016,33(2):202-206.
[8] 王传秀,严东超,尹厚军,等.基于模糊PID的无刷直流电机调速性能研究[J].计算机仿真,2015,32(10):430-434.
[9] 李红亮,王加祥,曹闹昌,等.无刷直流电机调速智能优化控制[J].计算机仿真,2015,32(10):426-438.
[10] 李学哲,张军,潘玉民.无刷直流电机系统的CMAC逆模型控制[J].电机与控制应用,2014,41(12):1-5.
SimulativeComparisonofControlSystemsforBrushlessDCMotor
CHENG Qiming, XU Jin
(SchoolofAutomationEngineering,ShanghaiUniversityofElectricPower,Shanghai200090,China)
Brushless DC motor is a multivariable,nonlinear control object,while PID control and it is difficult to achieve the modern industrial control requirements of high precision and high performance in other traditional control methods.Based on BLDCM motor as the research object,the structure and principle of BLDCM motor are introduced,and the structure of 3 BLDCM control system is given based on the traditional PID,fuzzy PID and neural PID.Finally,the performance of 3 BLDCM motor speed control systems is simulated on the MATLAB/Simulink simulation platform.The simulative results show that the performance of fuzzy PID control system is optimal.
brushless DC motor;PID control; fuzzy PID control; neural network PID control
10.3969/j.issn.1006-4729.2017.05.001
2016-07-06
徐进(1959-),男,本科,讲师,上海人.主要研究方向为微机测控,微电网控制等.E-mail:2522839292@qq.com.
上海市重点科技攻关计划(14110500700);上海市电站自动化技术重点实验室(13DZ2273800).
TM351
A
1006-4729(2017)05-0415-04
(编辑 桂金星)
猜你喜欢
大电机技术(2022年5期)2022-11-17
防爆电机(2021年1期)2021-03-29
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
测控技术(2018年2期)2018-12-09
电子制作(2017年1期)2017-05-17
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年10期)2015-03-01
电机与控制应用(2015年1期)2015-03-01
电力工程技术(2014年1期)2014-03-20