
航拍影像与点云数据在矿区生态修复中的应用
2017-12-19 08:22何原荣陈鉴知李明峰
中南林业科技大学学报 2017年4期
何原荣,陈鉴知,林 泉,李明峰
(1.厦门理工学院 计算机与信息工程学院,福建 厦门 361024;2.贵州财经大学 管理科学学院,贵州 贵阳550025;3.福建省基础地理信息中心,福建 福州 350003;4.闽南师范大学 生物与技术学院,福建 漳州 363000)
航拍影像与点云数据在矿区生态修复中的应用
何原荣1,陈鉴知2,林 泉3,李明峰4
(1.厦门理工学院 计算机与信息工程学院,福建 厦门 361024;2.贵州财经大学 管理科学学院,贵州 贵阳550025;3.福建省基础地理信息中心,福建 福州 350003;4.闽南师范大学 生物与技术学院,福建 漳州 363000)
由于矿业开发强度高和规模大,以及在开矿过程里不注意维护好矿区的生态,目前矿区的生态维护承受着十分庞大的压力。为更好地对矿区进行生态修复,首先,本研究介绍矿区修复的基本内容及其效益,通过无人机像和三维激光扫描仪技术获取的航拍影像图和激光点云数据,阐述航拍影像与点云数据的获取流程和处理方式,将矿区生态修复采集的数据从二维拓展到三维;以矿区待修复区的测量分析和已修复区林地细化调查为案例,在ArcGIS、南方CASS、FAROscene和GEOmagic等软件支持下,得矿区各类专题图和建立三维场景模型,为矿区生态修复提供技术和成果支撑。应用结果表明,航拍影像与点云数据在矿区生态修复中的应用,成效明显。
无人机航拍;点云数据;矿区;修复分类;植被统计
各类矿产物资是当今社会在发展中不可缺少的一种基本成分,由于矿业的开发强度高和规模大,以及在开矿过程不注意维护矿区的环境,目前矿区的生态维护承受着十分庞大的压力。开发矿产资源导致的一系列环境问题现在已经成为普遍存在的一个世界性难题。矿区修复是指在矿区开采期间由于挖采、堆积和污染等原因引起的矿区地表损毁,将其综合治理,重构生态系统,还包括重构经济系统和社会系统。无人机航拍获取影像数据的时间灵活,保证成像时相和质量,很好地实现矿区修复分类,并为后续获取三维激光点云数据提供了重要依据,将二维拓展到三维;三维激光扫描技术是继GPS技术又一次技术革命,在扫描获取点云数据时,尤其是在较差的环境中,比如光线昏暗的井下和可能发生矿山地质灾害的地方,其快速性、全天候、非接触性、高密度、高精度等优点相比于传统测量方式具有极其明显的作业优势。
近年来,矿区的监测生态修复成为国内外学者研究的热点。早在1974年,英国就有人用某火山的影像数据中的热红外波段来监测煤火。遥感影像信息可直观、形象综合表达土壤、植被和水体等环境信息[1-2]。而基于UAV航拍技术来得到地面影像数据是一新兴的手段,主要有飞行时数长、数据同步传送、能进入危险区、消耗资源少以及飞行姿态灵动等优势,是对卫星遥感的有力补充和增强手段[3]。桂德竹[4]等使用UAV获取低空姿态飞行的高清航拍数据来探索徐淮矿区的沉降监控。邴媛媛[5]基于无人机技术获得的航拍影像上完成辽宁的一个矿山比例为1∶10 000的低姿飞行航拍图,联合地形图、土地现状图和其他相关信息,选择监督分类的形式,得到矿山的资源利用现状,将监控区域里的矿产的违法开采区分析出来。
瑞士的Stamos和Aleln等[6]运用激光扫描技术重建起圣皮埃尔大教堂。刘昌军等[7]利用三维激光扫描仪及LIDARVIEW软件,实现了矿山地形的快速性测量与成图,从而得到矿区的DEM数据、等高线和数字地形图等成果。王长江等[8]分别用Trimble FX三维激光扫描仪建立了山东金岭铁矿和新城金矿井下三维巷道的模型,在技术上为矿区的安全生产信息化管理提供支持。雷朝锋[9]使用ScanStation2 扫描仪对豫北的露天矿测量,在通过建立可量测的矿山扫描影像的三维模型基础上,制出了大比例尺的矿区地形地质专题图。黄有等[10]使用Riegl VZ-400三维激光扫描仪对某矿堆进行了三维扫描并利用三维建模进行测算矿堆的矿方量,再采用 GPS 进行扫描数据的平面和高程精度的验证,其结果表明,三维激光扫描仪能够满足测算矿方量的精度要求。王黎明等[11]运用点云数据扫描技术在山东某矿区的巷道开展了短期变化的监测作业。邱贞生[12]于马坑铁矿中利用点云数据扫描技术测绘出地表以下的采空区。这些研究工作已获得了良好的成果,但尚无有关将航拍影像和激光扫描系统联合应用于矿区修复工程管理的报道。
本研究以福建省上杭县紫金矿区典型的修复工程为研究对象,借助航拍影像和点云数据这两项高精尖的技术,通过无人机航拍影像,可以很好地实现矿区修复分类,并为后续获取三维点云数据提供重要依据。其次,利用三维激光扫描技术获取的点云数据将二维拓展到三维,获取所需的三维模型并进行数据量算制成专题图。对紫金矿区已修复区的后期监管中的林业细化调查和待修复区三维量测,协同推进矿区的生态修复,为全国矿区的修复工程管理提供应用借鉴。
1 航拍影像与点云数据应用于矿区生态修复必要性
矿区修复作为一项较为复杂的工作,贯穿于矿山开采的始终。有前期的矿区修复规划和方案编制,中期的修复工程的方案实施和工程验收等,及后期的修复情况调查和监测。在矿区的修复规划时,需要调查所要修复矿区的损毁情况[13-14],进而利用相应的算法,依据若干个评价因子,用数据解析修复区域的适宜性。在参照相关质量控制标准进行修复的测绘之后,就可以实施具体修复的内容,如岩土工程、水利工程和植被的重建等。在修复工程验收之后,还需进行后续的调查监测等,如植被后期的管护以及成活率调查等。矿区修复最终的目标,是将资金、技术和人力资源在修复工程中进行合理的配置,从而实现生态、经济和社会这3个方面效益的共赢:
(1)生态效益。矿山修复区的工作就是维护和重构该地生态的过程,是矿区生态修复中生态环境综合整治的主要成分,紫金矿山实施修复后将产生的生态效益具体体现在:采矿扰动形成的表面土壤堆放场,通过土地修复,修复为林地或草地后,可以保护当地的林业生态系统的健全,同时还可以促进它的可持续发展。矿区生态修复通过重构生态,会使当地的空气质量与气候变化具有积极效应和长期良好的有效改变。
(2)经济效益。紫金山矿区的修复方案付出实施后,对当地的经济发展是非常有利的,同时也有助于改善紫金山矿区周围居民的生活质量。矿区修复为林地,栽种了大量的灌木和乔木,能获得较为可观的经济价值。同时,植被具有保持水土,维持生态,供游客欣赏等众多用途,这些用途虽不直接产生经济效益,但可减少不修复带来的潜在损失,同时产生许多间接的经济价值,如促进经济作物生长,保证土壤的肥力。因此,紫金山矿区的修复产生的直接和潜在的经济效益是相当可观的。
(3)社会效益。对紫金山矿区的已损毁地表实施修复,能产生非常有效的社会效益。首先,修复工程实施后,可以减少矿区开发中带来新的水土流失,减轻所造成的损失和危害,可确保矿区人员的安全问题,如由于开采造成的山体滑坡和泥石流。其次,修复方案实施后,对于合理调整项目生产的直接区域和周边受影响区域的土地利用具有积极促进作用,从而推动当地林业农业协调发展。紫金山矿区修复可以减少生态环境的破坏问题,为建设工程以及周围区域,创造适合居住的生活环境,达到较好的社会效益。
综上所述,紫金山矿区修复研究项目将为当地的社会发展有较大的促进作用,将为当地的环境带来巨大的有利成果。对该矿区进行生态修复研究具有重要性。在矿区修复的监测中,传统的方法是利用卫星遥感影像或者人工测量的方式进行,存在误差大或效率低。本研究采用航拍影像与点云数据两项新技术相结合,将其应用于紫金矿区的修复工程管理中,主要利用航拍影像与激光点云进行修复初分类、修复后植被成活率追踪[15-16]等,在航拍影像调研之后,再利用三维激光扫描仪进行实地调查,进行修复土方计算、树林种类辨认等。因此,航拍影像与点云数据相结合应用于矿区修复是非常有必要的。
2 航拍影像与点云数据在矿区生态修复的设计方案
2.1 无人机技术
无人机(英文简写UAV)是一种通过无线电设备或者通过程序操纵的无人的飞行设备,按照空机的质量大小分为微型、轻型、小型和大型无人机。本研究采用eBee微型无人机来获取航拍影像。eBee无人机系统作为一种新的测图系统,主要包含有软硬件两个方面。利用碳泡沫纤维膜材料制作而成的微型无人机,其质量不足700 g,是无人机系统中主要的飞行设备。它在起飞的过程中不需要跑道,只要借助人的外力抛掷就能够起飞,在软件中规划无人机的飞行路线及飞行时长可实现无人机全自动航行和降落,这在保证准确飞行的同时也提高作业的效率。由于其全自动的飞行功能,所以该无人机的操作也相对简单,无需专业人员也可以自主操作。软件部分有航线规划软件和数据处理软件,前者用于规划无人机的飞行路线,设置航行参数,监控空飞轨迹以及记录保存所航拍的影像数据;后者用于处理航拍所得到的数据,最终得到所需要的航拍影像数据进行下一步处理。
2.2 三维激光扫描仪
三维激光扫描仪由其所在的载体不同,主要分成机载式、车载式、地面式以及手持式这些主要类型,本研究使用FARO地面三维激光扫描仪来得到场景数据。主要包括主机中集成LIDAR发射器和接收器、时间计数器、滤光镜、微型计算机及搭载在上面的软件以及高分辨率的相机,外部主要有三脚架和数个靶球。其中,仪器的核心部分是LIDAR发射器与接收器,它决定了本台设备扫描能力的强弱;时间计数器则影响了所扫描的点云数据的精度;在扫描点云数据结束之后,扫描的场景将由高分辨率相机进行不同角度的拍摄;所拍摄的图像提供的色彩,将通过内置计算机赋色到点云数据上,形成与现场一致的彩色点云数据;靶球起到坐标定位的作用,将所有不同扫描站点之间的场景统一到同一个坐标系中,使场景拼接不会出现断面的情况。内业中处理三维点云是用到FAROscene软件将点云数据拼合和除燥,接着由Geomagic或者Auto CAD For HDmodeling等专业软件对预处理后的三维点云数据建立三维场景并解析数据等。
2.3 设计技术路线及数据采集
本研究基于无人机和三维激光扫描技术,利用航拍影像与点云数据获取矿区修复情况的基本原理,通过分析专题图与三维模型数据量算,将其用于紫金矿山修复区的工程管理上。具体技术路线是:通过无人机获取高分辨率影像数据进行解译得到的矿区影像数据,利用ArcGIS将矿区的土地分成不同类型,根据土地不同的破坏类型,初步明确其修复的方向,用数据解析出修复该地的适宜性;其次根据实地情况,利用三维激光扫描仪得到矿区修复区的点云数据,通过点云数据拼接配准,去噪简化预处理后,获得完整场景所需点云,封装得到基础的三维模型,最后结合三维模型软件操作得到矿区修复区域的立体场景模型。通过软件对矿区修复区域三维模型进行数据量算分析和专题图的制作,最终用于紫金矿区的修复工程管理上,本研究技术路线如下图1所示。
在矿区生态修复数据获取过程中,与所有传统的测绘项目的基本流程相比,三维激光扫描获取点云数据的外业流程基本一致,首先踏勘后规划,最后采集数据。在扫描之前,先了解扫描区域大致的地理区位、附近的人员活动是否会影响扫描的进行、以及要进行扫描的时间段的天气情况,做好安全防护措施避免点云数据在采集时出现意外情况。在到现场踏勘之后,根据需要数据要求,进行选择扫描仪的架站点以及靶球的摆放位置。如果是单场景时,一个工作站点就能扫描所有所需点云数据。否则,在两个扫描站点转换之间,必须要求摆放3个及以上的靶球作为坐标定位点使用,便于多站点云数据的拼接。在选择靶球摆放位置时需要注意,不能遮挡到重要地物,不要摆放在架站点的扫描盲区,且保证在扫描过程中不会发生移动,最好选择在高处或者不起眼的位置。如靶球的底部是圆形的磁铁片,可吸附在路灯杆上。在选择好靶球的摆放位置之后将仪器架设在所选好的站点,注意调整好三脚架,避免安放仪器时跌落以及扫描时风吹倒仪器的情况发生。在整平扫描仪后,对仪器进行参数的设置,将其设置为室外20 m、分辨率1/4、4倍质量,点云数据的距离为6.136 mm/10 m。若采集不同的场景,需要对相应的参数设置作出改变,以达到最合适的场景效果。在扫描点云数据及相机拍摄结束后,查看点云场景预览,检查目标靶球是否都扫到,否则需要重新布站扫描,直到场景扫描结束。本研究部分区域的修复林地点云数据处理后的效果如图2所示。
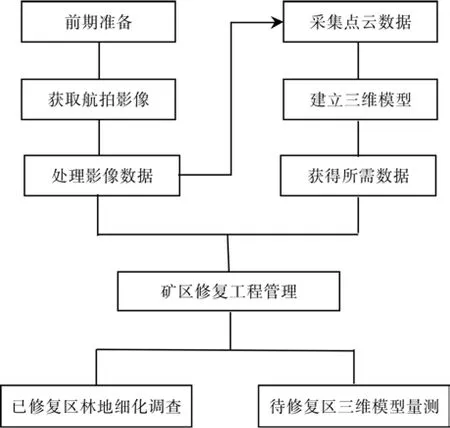
图1 技术路线Fig.1 The technical route

图2 修复林地点云数据预览Fig.2 The preview of woodland point cloud data
3 生态修复的数据分析与管理
在航拍影像中,将紫金矿区初步划分为已经修复的区域和待修复的区域。已修复的区域要进行监管,本研究以林地细化调查为例。通过影像数据的色彩标志,可以判断树是否死亡,经过人工实地抽样,构建起各类树木的病死树的判断标志,进而用面积统计法或者株数统计法估算出修复林木的成活率。面积统计法适用于修复密度高且面积大的林地,株数统计法适用于修复密度低的能清晰分辨出单株苗木且面积较小的林地。还可以直接在航拍影像上计数修复苗木的数量,进而计算其单位面积的种植密度。待修复的区域,将要进行规划施工,本研究以三维量测为例。图3为矿区初分类图,已修复区域共6 km2,待修复区共4.6 km2。
3.1 已修复区林地细化调查
3.1.1 航拍影像图的调查
在修复林地资源调查应用中,其图像精度要求比摄影测量要低很多。但由于航拍所得数据的分辨率高,所拍摄的地面信息非常丰富。在理论上,计算机也能够对航拍影像进行自主纹理分析,包括确定林地的种类、树的直径和林地面积,甚至连小斑图块边界也能够确定。由于林地的树木种类以及空间结构对于林地的生态和经营都非常重要,而航拍影像的分辨率高的优势,能够用纹理分析,估计出树木种类和树个体之间位置关系,这也是目前航拍影像的研究热点之一。目前,影像在经过坐标匹配之后,可直接使用GIS软件通过勾画出林地图斑,进而统计出修复的面积。

图3 矿区初分类Fig.3 The beginning classi fi cation of the mining area
同时,可根据经验和树木影像特征,判断树木的种类,主要的判读树种标志有,树冠影像的形状、大小、颜色等,再结合修复林地的数据,建立树种的解读标志。无人机航拍的影像分辨率很高,一般可以直接根据树木的树冠形状来识别出树种。另外,还可通过比例测算出所追踪修复的树木冠幅和树高[17],在已知植株的种类情况下,根据二元树龄表,比较所采集数据对应的树龄数据,确定其树龄大小。在后续结合三维激光扫描技术,进行实地抽样,以确保航拍影像的可靠性。
航拍影像所拥有的地面分辨率高、作业时间灵活和消耗资源少等显著的优势,将会大大提升林地修复的成果品质,减少调查所耗的人力,提升修复质检水平,将人力由沉重的体力作业中释放,汇聚力量用于内业质量的提升。而且航拍影像的应用,还可以推广到整个林业调查中,响应国家有关建设节约型社会的号召,可以为林业调查节省下人力物力的投入。如图4为各类植被信息的调查。

图4 各类植被信息的调查Fig.4 The investigation of all kinds of vegetation information
3.1.2 点云数据实地调查
在航拍影像的基础上,到实地抽样扫描得到场景的点云数据,在外业采集好数据后对其进行处理,建立场景的三维模型,可以对其赋色处理,使模型尽可能接近真实场景。在软件中,还可直接对林地模型进行测量,获取所需要的数据。由图5可知,树高为5.889 m,树直径为0.182 m。表1是对紫金山修复林地实地抽样调查统计,这些数据都能很好地验证前文中航拍影像对修复林地的调查信息。

图5 植被信息的统计Fig.5 The vegetation information statistics

表1 树高树径统计Table 1 The statistics of height of tree and tree-walk
3.2 待修复区量测分析
航拍影像在经过地理坐标校正之后,在ArcGIS中将影像数据进行未修复矿区细分类,主要有矿山挖损土地、裸露凹陷采场、建筑拆除、废石堆场尾矿库等。图6为建筑、废石堆和挖损地:

图6 建筑、废石堆和挖损地Fig.6 The construction, waste dump and mining
未修复矿区的细分类完成之后需要进行地面调查,可以扫描所需场景的点云数据来获取之后将要进行的适应性分析的评价因子[18],比如地形的坡度、压占的面积等。与遥感影像相比,航拍影像数据分辨率更高,能够清楚识别出是何种地物地貌,例如,形状像一个水库的即为尾矿库,尾矿坝也像水库的坝。目前,紫金矿区有部分区域是下一步将要进行生态修复,表2统计出要进行修复工程的建筑、废石堆和挖损地这3个类型的面积。

表2 待修复区面积统计Table 2 The area statistics of delay reclamation
在初步分类之后,结合利用三维激光扫描技术,进行实地调查采集数据,如对将要修复的挖损土地进行回填,这需要进行土方量的计算。传统的土方量算法主要是使用全站仪或者GPS-RTK在野外作业时采集大量的高程点,内业再使用相关软件,对采集的高程点自动化计算,利用三角网、方格网、等高线或断面等几种数据来量算,最后得出土方量的成果。本研究使用三维激光扫描技术来快速获取待修复区的量算。使用三维激光扫描仪扫描场景点云前,分辨率设为1/4、4倍质量,每一站的扫描时间大约15 min,效率大大提升。将处理完的数据用Geomagic软件进行拟合地表面形成封闭区域,将基准面设置成与采集点云中的最低点重合,由软件自动得到挖方量的结果,图7为区域土方的量算结果。
本次区域土方的总体积为82.48 m3。目前,利用点云数据来量算土方,并没有相关的规定,在之后的发展中还需要形成一套完整的测量规范。表3为3种方法的结果比较:

图7 土方量计算结果Fig.7 The calculation results of earthwork quantity

表3 土方量结果比较Table 3 The results comparison of earthwork quantity
由计算结果可知,点云数据扫描法与方格网法和DTM法相比较,土方量基本一致,其相对误差只有1%左右,因此,点云数据扫描法量算土方,完全可以达到工程作业精度方面的需求。
4 结论与讨论
本研究以福建省上杭县紫金矿区典型的修复工程为研究对象,使用eBee无人机的航拍影像和FARO三维激光扫描仪的点云数据讨论在矿区已修复区域的林地细化调查和待修复区域三维量测。首先,在矿区已修复的区域,以修复林地细化调查为例,用航拍影像进行工程的后期监管并利用点云技术将二维拓展至三维,对航拍影像起补充作用。其次,待修复区域中,用航拍影像进行工程前期的调查,以土方量算为例用点云数据算出具体工作量。这两种高新技术联合应用于修复工程管理中,相比传统测量方式,航拍影像获取空间分辨率高以及点云数据非接触性、全天候作业具有巨大优势。目前,本研究流程与技术方法已应用于紫金山矿区修复工程管理中,成效明显。
航拍影像和点云数据联合作业的优势明显,可更多地应用到修复工程管理中,如岩土工程、边坡支护等。本研究存在的不足主要有:进行林业修复统计时未建立综合评价分析系统;在点云数据建模时,由于点云数据量较大,剔除噪点及建模花费时间较多。今后,可结合航拍影像,借助激光点云数据进行矿区林地修复的适宜性分析,在修复林地细化调查中可建立树龄和树参对应关系管理;同时开发更好的软件来辅助点云数据快速地自动化建模。
[1]孙 华, 林 辉, 熊育久,等.Spot5 影像统计分析及最佳组合波段选择[J].遥感信息,2006,21(4):57-60.
[2]邢元军,刘晓农,宋亚斌.国产高分辨率遥感影像融合方法比较与分析[J].中南林业科技大学学报,2016,36(10):83-88.
[3]何原荣.矿区环境高分辨率遥感监测及信息资源开发利用 [M].北京: 科学出版社, 2014.
[4]桂德竹,李 钢.林宗坚,等.基于无人飞行器遥感的矿区沉陷控制及景观规划研究[J].测绘科学,2008,33(6):105-107.
[5]邴媛媛.无人机遥感在某铁矿矿区资源监测中的应用[D].辽宁: 辽宁技术工程大学,2008.
[6]Allen P K, Troccoli A, Smith B,et al.New methods for digital modeling of historic sites[J].IEEE Computer Graphics and Applications, 2003, 23(6): 32-41.
[7]刘昌军,赵 雨,叶长锋,等.基于三维激光扫描技术的矿山地形快速测量的关键技术研究[J].测绘通报,2012(6):43-46.
[8]王长江,张倬锋,刘夫晓.激光扫描技术在数字化矿山建设中的应用[J].金属矿山,2012, 36(10):108-109.
[9]雷朝锋.基于三维激光扫描技术在豫北露天矿测量中的应用研究[J].测绘与空间地理信息,2014,37(8):96-98.
[10]黄 有,郑 坤,刘修国,等.三维激光扫描仪在测算矿方量中的应用[J].测绘科学,2012,37(3):90-92.
[11]王黎明,刘夫晓,王新生.三维激光扫描技术在矿山巷道变形监测中的作用[J].矿山测量,2013(3):79-80.
[12]邱贞生.三维激光扫描技术在矿山采空区测绘中的应用[J].福建地质,2012,31(1):90-94.
[13]荆平平.无人机影像获取与信息提取应用研究 [D].北京:中国地质大学,2014.
[14]何原荣,郑渊茂.无人机航拍技术配合遥感的海岸带规划应用[J].现代电子技术,2015.38(23):24-27.
[15]谢鸿宇,赵耀龙,杨木壮,等.基于地面Lidar的树冠体积和表面积测量方法研究[J].中南林业科技大学学报,2015, 35(4):1-5.
[16]王 成,郄光发,董建文,等.厦门森林城市建设理念与布局研究[J].中国城市林业,2011,9(3):8-11.
[17]贾宝全,王 成,邱尔发,等.城市林木树冠覆盖研究进展[J].生态学报,2013,33(1):23-32.
[18]邓世军,朱卓娃,江 宇,等.无人机航摄测量方法及精度分析研究[J].科技创新导报,2015(17):134-144.
Applications in the mining ecological restoration based on aerial imaging and point cloud data
HE Yuanrong1, CHEN Jianzhi2, LIN Quan3, LI Mingfeng4
(1 College of computer and Information Engineering, Xiamen University of Technology, Xiamen 361024, Fujian, China; 2.Guizhou University of Finance and Economics, Guiyang 550025, Guizhou, China; 3.Fujian Provincial Geomatics Center, Fuzhou 350003, Fujian,China; 4.School of Biological Science and Biotechnology, Minnan Normal University, Zhangzhou 363000, Fujian, China)
Due to the high mining development strength and scale, and in the process of mining don’t pay attention to the ecological safeguard mining area, the mining area ecological maintenance under enormous pressure.To better for the mining area ecological restoration, fi rst of all, this paper introduces the basic content of mining area repair and bene fi t, by the unmanned aerial vehicle (UAV)and 3D laser scanner technology for aerial image and laser point cloud data, aerial images and the point cloud data acquisition process and approach, the data from the mining area ecological restoration from 2D to 3D;In the mining area to repair the measuring analysis and has been fi xed area forest land detailed investigation for the case, such as ArcGIS, southern CASS, FAROscene and GEOmagic software support, mining area of thematic map and 3D scene model is set up, support for the mining area ecological restoration technology and achievements.Application results show that aerial images and point cloud data to the application of ecological restoration in mining area,effect obviously.
unmanned aerial; point cloud data; mining area; reclamation sorting; vegetation statistics
S731.6;S718.57
A
1673-923X(2017)04-0079-07
10.14067/j.cnki.1673-923x.2017.04.014
2016-09-13
国家自然科学基金面上项目(41574011);福建省自然科学基金面上项目(2016J01199),福建省测绘地理信息科技创新项目(2015J14)
何原荣,副教授,博士后;E-mail:heyuanrong@126.com
何原荣,陈鉴知,林 泉,等.航拍影像与点云数据在矿区生态修复中的应用[J].中南林业科技大学学报,2017, 37(4):79-85.
[本文编校:文凤鸣]
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
时代邮刊·下半月(2020年9期)2020-09-23
模具制造(2019年3期)2019-06-06
黑龙江粮食(2019年4期)2019-05-10
金桥(2018年6期)2018-09-22
小学生优秀作文(低年级)(2018年6期)2018-05-19
农民致富之友(2018年2期)2018-03-25
农民致富之友(2018年1期)2018-02-26
陕西画报(2017年1期)2017-02-11
现代营销·经营版(2015年3期)2015-04-20
