
南疆土壤特性下拖拉机悬挂犁悬挂方式的设计及优化
2017-12-16 09:15闫树军李凤娟
农机化研究 2017年5期
闫树军,张 宏,万 畅,孟 炜,李凤娟
(塔里木大学 机械电气化工程学院,新疆 阿拉尔 843300)
南疆土壤特性下拖拉机悬挂犁悬挂方式的设计及优化
闫树军,张 宏,万 畅,孟 炜,李凤娟
(塔里木大学 机械电气化工程学院,新疆 阿拉尔 843300)
传统的三点悬挂方式过于依赖生产经验,不能适应现代农业机具设计和开发的快速发展,为更好地保证犁耕的作业质量,必须在悬挂方式上进行合理的调整。本文对悬挂犁与拖拉机挂接的方式进行了重新设计,使悬挂犁和拖拉机三点悬挂构成挂接机组,犁的挂接点落在拖拉机的动力中心和犁的阻力中心的连线上,即三点构成一条直线,而将挂接机组上的牵引点做为虚牵引点。同时,结合南疆土壤特性,并利用MatLab软件优化了相关参数,最终各性能参数与悬挂犁标准参数更接近,充分证明了悬挂方式改进的合理性。
悬挂犁;三点悬挂;挂接;拖拉机
0 引言
悬挂犁是通过悬挂架与拖拉机的三点悬挂进行机械连接的,主要是靠液压提升机构来完成升降;输送时全部质量由拖拉机承担。其结构紧凑、质量轻、机动性强、应用广泛[1]。南疆位于天山以南、昆仑山以北,属于极度缺水区,土壤盐碱化程度较高,为保证作业质量,确保机具保持平稳前进、耕深一致,不出现重耕、漏耕和切牵引阻力小等现象,就必须进行合理地挂接和调整[2]。
1 总体设计
1.1 悬挂方式的设计
结合南疆土壤特性对犁耕机组进行分析后,将原三点悬挂方式进行了调整:悬挂犁和拖拉机三点悬挂构成挂接机组,犁的挂接点落在拖拉机的动力中心和犁的阻力中心的连线上,即三点构成一条直线,而将挂接机组上的牵引点做为虚牵引点,如图1所示。

1.犁杠 2.销孔 3.下拉杆挂接机构 4.螺栓通孔 5.销耳(带孔钢板)
基本工作原理:①犁杠在工作状态下起牵引架的作用,在悬挂行走时起杠杆的作用,与螺栓和犁架连接后成为一个整体(钢性连接);②销孔与拖拉机的牵引点连接,起连接作用;③下拉杆挂接机构控制犁工作时的瞬心位置,悬挂行走时提升犁体,与拖拉机下拉杆为销连接;④犁杠上的两个通孔和犁架螺栓连接,构成犁架和犁杠的钢性连接;⑤销耳和下拉杆连接形成钢性连接。
1.2 悬挂犁的挂接
悬挂犁通常与拖拉机的三点悬挂构成机组,其挂接原则与牵引犁相同,只是在悬挂机组上牵引点为虚牵引点(图2中的π1、π2点也称瞬时回转中心)。其中,ab为中央拉杆,cd、c′d′为下拉杆。作业时,由液压装置通过提升臂控制下拉杆的升降来实现犁的起落。纵垂面内犁悬挂在abcd的四杆机构上,犁的运动用bc杆的运动表示。在某瞬时,犁以ab杆与cd杆延长线的交点π1为中心做摆动,π1点是纵垂面内的瞬时回转中心;bc杆的长度变化会导致π1点的位置也随之变化,会直接影响悬挂犁的入土性能。
水平面内,犁悬挂在cdd′c′的四杆机构上,在某瞬时,犁以cd及c′d′杆延长线的交点π2摆动,π2点是犁在水平面内的瞬时回转中心,悬挂机组瞬心位置对犁的工作性能有着直接的影响[4]。瞬心、阻力中心、动力中心三者之间位置的不同会产生4种不同牵引状态:正牵引、斜牵引、偏牵引及偏斜牵引。其中,正牵引为理想状态,不易得到,斜牵引较容易找到平衡,偏牵引容易使拖拉机稳定工作,偏斜牵引是斜牵引和偏牵引的合成。

图2 悬挂犁的挂接
2 主要结构及参数设计计算
2.1 部件设计以及目标函数的确定
悬挂犁对机具的基本要求:作业稳定,入土性能好,通过性高,挂接互不干涉。其所涉及的受力状况及参数较复杂,难以用统一的数学方程描述,考虑到设计内容的通用性,为确保悬挂犁作业的牵引性能,最终以瞬心点的纵坐标最小作为优化目标函数[3]。
2.2 连接部件的设计

图3 连接部件受力分析
2.3 薄壁圆截面的扭转切应力


约束条件为
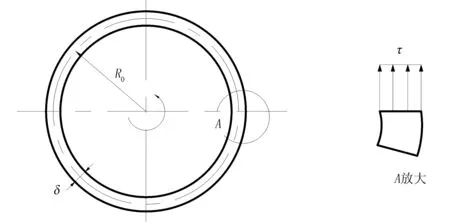
图4 薄壁圆管扭转切应力
2.4 下拉杆挂接机构的设计
下拉杆挂接机构在犁悬挂行走过程中受到拉力F,如图5所示。

图5 下拉杆挂接机构
在路面平整时下拉杆挂接机构受静载荷作用,而在路面不平整时受动载荷作用,拉力F的大小随动载荷一起跟随时间变化。
3 悬挂犁挂接机构的优化
3.1 挂接机构优化参数
拖拉机与悬挂犁构成作业机组需要满足的基本条件有:①悬挂犁自动入土较容易,有相对较大的入土角和入土力矩来保证入土行程足够短;②作业过程通过悬挂装置垂直面内虚牵引点位置的调整,保证工作稳定性的同时对地面有一定的适应性;③作业中通过水平面内虚牵引点位置的变化来保证工作幅宽和稳定地直线行驶;④运输时稳定性和通过性较好;⑤油缸的负荷及轮胎的负荷不超过允许值[5]。文章根据悬挂机组相关参数,参照郑德聪等在悬挂犁挂接参数的优化设计一文中的优化方法、结合机构的改进及根据需要选择不同的参数作为目标函数进行优化。

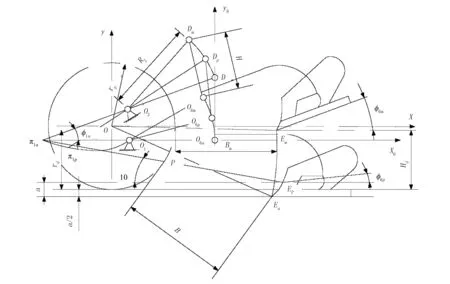
图6 悬挂机构在纵垂面内的投影简图
1)工作状态各点位置。 Ea在x6O6y6坐标系下的坐标为
2)入土状态时各点位置。悬挂犁处于入土工作状态时,Ep、O6p绝对坐标为
3)犁架立柱高度H和上拉杆长度R2为
4)田间转移状态参数。田间转移状态时,犁相对于拖拉机处于最高位置,(xDm、yDm)的约束方程为
网络是知识传播的高速公路,消除了知识传播的时空局限,人们可在任何时间和空间获取所需要的知识,这就使传统的大学教育模式面临巨大挑战。学生可以根据兴趣和任务通过网络获得知识,其效率已经远高于课堂教师讲授;网络传播可以一对多,也可以多对一交互学习,所涉及领域及知识面远超出课堂一对多传播;网络知识传播可以自主学习,真正体现兴趣驱动,体现学习者的主导地位;网络传播可以拆除大学围墙,突破单一学科限制,学生可以同时在不同的知识传播源获取知识,即在不同的大学、不同的国度同时学习;网络传播推动了知识更新,加快了知识创新,提升了知识应用。
运输隙角为
运输状态时,铧尖点与拖拉机后轮之间最小距离为
5)犁相对于拖拉机的速度瞬心。犁相对于拖拉机速度瞬心是下点π1,该点坐标(x,y)为
3.2 优化设计
3.2.1 设计变量

3.2.2 目标函数
边界约束[8]为
100mm 300mm≤B≤500mm,φ1amin≤φ1a≤φ1amax,3°≤φ6p≤15° 几何约束为 g1:R2-R2max≤0g2:R2min-R2≤0 g3:H-Hmax≤0g4:Hmin-H≤0 性能约束为 g5:φ6m-35°≤0g6:150mm-Bm≤0 为满足机组运输通过性的要求,应满足 g7:15°-φ6m≤0 g8:300mm-Hd≤0。 3.2.4 切应力约束 3.3 参数优化 悬挂犁挂接参数的优化属于非线性多变量约束问题,利用MatLab提供的函数来完成求解。TN-55型拖拉机配套1L-430型悬挂犁,结合南疆土壤特性在土槽实验下取得相关数据最终完成优化设计。输入参数如表1所示[6],优化结果如表2所示。 表1 输入参数 mm 表2 优化结果 得到的结果与1L-430型悬挂犁标准参数(φ6p=6.7°,R2=588mm,H=460mm,y6Ea=-615mm)进行比较,仅有较小的差别;与郑德聪在悬挂犁挂接参数的优化设计一文中所得到的优化结果比较:φ6p从6.49°提高到6.58°, 从592.76°降低到586.37°,H从496.93mm降低到463.48mm, 从-587.37mm降低到-603.48mm,各项性能参数与悬挂犁标准参数相比更为接近,充分证明这种悬挂方式的改进更加合理。 1)结合南疆土壤特性对悬挂犁挂接方式进行改进,优化计算结果与生产中长期使用的悬挂犁挂接标准参数相差不大,比单纯的悬挂犁优化结果有明显的提高,充分证明了该挂接结构的合理性,可以保证入土性能和工作的稳定性。 2)机构在优化设计过程中,对复杂农具的受力分析进行了简化,便于实际应用和操作,可用于其它农具的悬挂设计,适应性较强。 3)通过对悬挂犁挂接方式的设计以及参数优化方法的研究,对提高悬挂类农业机具与拖拉机悬挂的合理配备具有重要意义。 [1] 王树才,邓在京,文友先.我国农业机械CAD的发展思路[J].农业机械学报.2004,35(1):159-161. [2] 李宝筏.农业机械学[J].北京:中国农业出版社,2003:24-26. [3] 曾杰,鲁东.计算机辅助设计(CAD)在农业机械中的应用及实践[J].中国农机化,2000(4):33-34. [4] 高翔,王志勇,潘道远.拖拉机悬挂犁耕机组的阻力调节特性分析[J].机械设计,2013, 30(4):92-96. [5] 杨芳,何志民,杜白石. 三点悬挂机构参数计算机辅助设计[J].机械科学与技术,2001,20(6):9-11. [6] 郑德聪,崔清亮.悬挂犁挂接参数的优化设计[J].农业机械学报,2007,38(3):75-77. [7] 刘长年.拖拉机牵引阻力控制系统的建模与优化[J].农业机械学报,1984,15( 4):13-25. [8] Wu T,Chen C.Computer-aided curvature analyses of pla-nar four-bar linkage mechanism[J].Applied Mathematicsand Computation,2006,168(2):1175-1188. Suspension Design and Optimization of Plow Suspension Mode Yan Shujun,Zhang Hong,Wan Chang,Meng Wei,Li Fengjuan (Mechanical and Electrical Engineering College,Tarim University,Alaer 843300,China) The traditional three-point suspension way too dependent on experience, can not adapt to the rapid development of modern agriculture machinery design and development, in order to better ensure the quality of work of plowing, you must make reasonable adjustments in the suspension mode. The article on the suspension and tractor plow articulated manner has been redesigned to make the plow and tractor three-point suspension constituted suspension mount unit, plow mount point falls tractor and plow power center of resistance center connection, that is, three points form a straight line, but will mount tow point on the unit as a virtual traction point, combined with soil properties in southern Xinjiang ,and the use of software to optimize the parameters, performance parameters and each final suspension plow closer to the standard parameters, demonstrating ways to improve the suspension of rationality. suspension plough;three-point suspension;hanging;tractor 2016-04-14 国家自然科学基金项目(31160196);塔里木大学中国农业大学和联合基金项目(ZNTDLH1504);塔里木大学青年基金项目( TDZKSSZD201402) 闫树军( 1980-) ,男,陕西蒲城人,讲师,硕士,(E-mail)yanshujun0218@163.com。 S219.032.4 A 1003-188X(2017)05-0259-05

4 结论
猜你喜欢
一重技术(2021年5期)2022-01-18
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
歌海(2021年6期)2021-02-01
潍坊学院学报(2020年6期)2020-11-22
艺术家(2020年6期)2020-08-10
小学生必读(低年级版)(2019年3期)2019-07-08
中国测试(2018年10期)2018-11-17
儿童故事画报(2018年4期)2018-05-21
中国卫生(2016年7期)2016-11-13
决策探索(2016年19期)2016-11-02
