
基于STM32微处理器的播种机工况故障采集系统设计
2017-12-16 09:15李卓然
农机化研究 2017年5期
李卓然
(罗定职业技术学院 电子信息系,广东 罗定 527200)
基于STM32微处理器的播种机工况故障采集系统设计
李卓然
(罗定职业技术学院 电子信息系,广东 罗定 527200)
随着我国信息化水平的不断提高,机械自动化、计算机控制系统和测试计量行业的不断发展,使得智能控制被广泛的应用到农业生产、工业生产和高等研究等各个领域。为此,基于STM32微处理器设计和研发了播种机工况故障采集系统。系统以STM32微处理器为核心,硬件部分主要包括信息采集、人机交互、智能控制、报警、自动补偿和电机驱动等模块,主要作用是完成对传感器节点的数据采集、分析、处理和控制功能;软件部分主要包括速度信息、播种量信息、漏播判断、开沟器堵塞和种箱空检测4个子程序。试验结果表明:所选用的TAP-40LS40N1-D3传感器能够精准检测到种子流、种箱排空、输种管堵塞等信号;在一定干扰环境下,系统漏播报警的准确率均在97%以上,实现了播种机工况故障精确采集功能,且该系统稳定性高,错误率低,具有十分宽广的应用前景。
STM32;播种机;工况故障采集;传感器
0 引言
“十二五”期间,随着工业化、城镇化发展步伐的加快,给农业发展带来较大的需求空间。近年来,我国经济实力不断增强,国家对农村农业的投入支持力度将不断加大,20世纪以后,机械、电子等科学技术进步及其应用越来越广泛,为农业发展提供了强大的技术支撑。播种是粮食种植生产的关键,播种的好坏直接关系到种子在田间的合理分布,而播种机的应用能够节省播种时间、提高工作效率、实现作物稳产高产。本文基于STM32微处理器设计和研发了播种机工况故障采集系统,以STM32微处理器为核心,集成信息采集、人机交互、智能控制、报警、自动补偿和电机驱动等多个模块,可以实现对种子流、种箱排空、输种管堵塞的检测和判断。
1 播种机系统功能与原理
播种机一般从穴粒数合格率、播种均匀度、粒距合格率、播深稳定性及种子破损率等几方面考虑评价其播种的性能。根据以上指标,确定播种机工况故障采集系统的设计功能有以下几点:
1)排种故障实时监测。通过传感器对播种机漏播、堵塞进行实时判断与检测,当作业中发生故障时,系统就会判断出故障形式及故障所在位置,并采取相应的措施。
2)播种参数实时监测。通过传感器对株距、合格数、漏播数、作业面积、作业效率及前行速度等几方面进行实时判断与检测。
3)速度采集。主要采集播种机在作业时的行进速度。
4)智能报警装置。机器在作用中发生故障时,通过蜂鸣器进行报警,智能报警还能够根据故障类型确定发生的具体位置并在人机交互界面进行实时显示。
5)电机驱动。通过控制系统产生脉冲对排种器直流电机进行驱动,保证播种均匀度和播深稳定性。
6)漏播补偿。当检测到漏播时,再次对该穴位进行播种操作,避免后续农民自己补种。
1.1 排种故障监测
式中,δ为弥散圆的直径,设f为透镜的焦距,L为对焦距离,F为镜头拍摄的光圈数F=f/D,D是投影镜头光瞳的直径.
播种机工况故障采集系统工作原理是利用传感器实时检测机器各部件运行状态,发现故障,且能够根据传感器节点准确判断故障位置。该系统在使用过程中,当发现播种实际的株距小于0.5Xr时,则自动判断机器发生重播故障,并显示该故障代码并报警提示;当发现播种实际的株距大于0.5Xr时,则自动判断机器发生漏播故障,并显示相应故障代码并报警提示;当开沟器处的传感器长时间传送信号给处理器,则表示播种通道发生堵塞。在装载种子的箱子处也设有一传感器,如果种子已经播种完,则会产生种箱为空的信号,此时为种箱空故障。系统对漏播和重播的判别主要是结合机器前行速度和正常株距设定值及漏播和重播实际落种的时间差综合计算的。播种机工况故障采集系统的检测原理如图1所示。

图1 播种机工况故障采集系统检测原理图
播种机在工作中,外槽轮随着排种驱动轴旋转,玉米种子在重力作用下被槽轮带着旋转,然后进入播种管道,种子在下落中经过种箱,堵塞两个检测传感器。在正常情况下,种子会按照一定的时间间隔依次经过种子检测传感器,传感器会产生一个脉冲信号,该信号转化为TTL信号发送至处理器进行累加计算。系统根据漏播时间差设定漏播判定值,当定时时间到,若定时器没有被初始化,处理器会产生一个溢出中断,则判定播种系统发生漏播操作;当连续3次出现漏播现象时,发出报警,提醒工作人员注意。
种子在重力作用下,掉入开沟器时,堵塞检测传感器也会产生脉冲信号。当有堵塞发生时,则一直产生脉冲信号,信号转化为TTL信号发送至处理器进行累加计算,同时调用堵塞中断服务程序,发出报警,提醒工作人员注意。
当种箱中种子数量不足时,种箱检测传感器会产生一中断信号,系统主程序会暂时中断,去执行空箱服务中断程序,并进行报警,提醒工作人员注意。
该播种机工况故障采集系统每一行都安装了种流和堵塞两种检测传感器,当发生播种故障时,系统会自动识别故障类型并判断出故障点,且将故障信息以报警和屏幕显示的方式提供给工作人员,以方便工作人员快速准确地解决故障,提高播种工作效率。
1.2 人机交互界面

图2 工况故障采集系统的人机交互界面
操作界面主要有开关、电机、测速3个功能按钮,负责系统的开关机、电机启动和行进速度测量。“开关”是整个采集检测的电源开关;“电机”是对电机进行启动或者停止操作的按钮;“测速”则是控制播种机测速传感器的开关。在人机交互界面有个4×4的键盘,数字“0~9”主要用于数据的输入;“L”“R”“U和“D”则用来控制显示屏光标的上下左右移动;“del”用来进行删除或者退格操作;“M”用来进入主菜单以及其他特定的功能。液晶显示屏上主要是指示播种作业中的机器和工作状态,主要包括株距、合格数、漏播数、作业面积和行进速度。当机器出现漏播、堵塞、空种问题时,系统屏幕就是出现相对应的故障标识符和位置。
2 播种机工况故障采集系统硬件设计
2.1 系统的硬件总体方案
播种机工况故障采集系统硬件平台是整个系统重要部分之一,该系统硬件模块主要包括:信息采集、人机交互、STM 32智能控制及电机驱动等模块,这些模块的主要作用是完成传感器节点的数据采集、分析、处理和控制等功能。工况故障采集系统硬件框架图如图3所示。
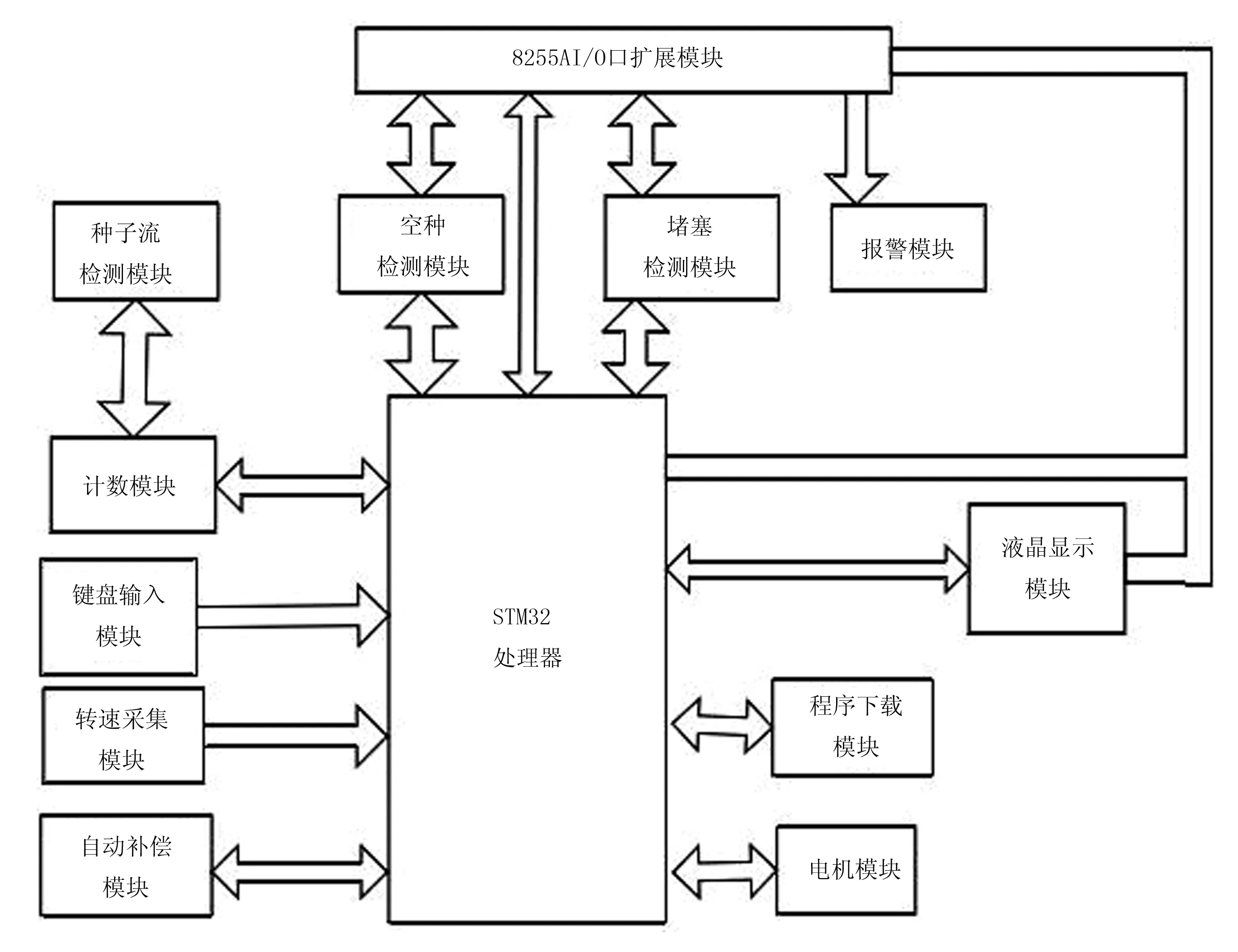
图3 工况故障采集系统硬件框架图
信息采集中的传感器主要有种箱、种子、堵塞和转速等4种检测传感器,功能是采集机器工作状态和转速状况信息,并经过STM 32核心处理器对信号进行运算处理;4×4矩阵键盘主要用于菜单选择、数据参数信息的输入;STM 32控制系统是播种机工况故障采集系统的核心,主要对采集到的信号进行进一步处理,并根据计算结果输出相应工作指令给各执行器;电机驱动模块根据系统指令驱动电机带动主排种轴转动,完成播种操作,并在漏播发生时带动补播轴转动,实现补种操作;报警模块采用蜂鸣器的形式提醒工人员采取措施;显示模块主要是显示机器工作状态和故障信息。
2.2 信息采集模块
播种机的工作环境复杂而多变,如果仅仅是靠驾驶员来观察播种状况,往往费时又费力,所以应该给播种机装上具有“自我”识别能力的系统,能够对播种信息进行实时采集监测。工况故障采集系统的重要部分是信息采集模块,而信息采集的模块的核心在于各类传感器,另外就是信号采集的处理与优化电路。
本文研发和设计的工况故障采集系统与2BH-3播种机播种行相符合,共有3个播种行;每个播种行都装配种子箱,并安装空种、种子流、补种和堵塞传感器。系统中共有整个系统12个传感器,型号为TAP-40LS40N1-D3。传感器信号采集处理电路图4所示。
TAP-40LS40N1-D3传感器输出电压信号经过转化后发送给STM32微处理器进行处理,单片机可以接收的电压信号。空种和堵塞两种检测传感器电压信号74LS21芯片相接,经与门处理后再输送至STM32中断引脚0,堵塞电压信号接至STM32中断引脚1,种子流检测传感器电压信号接至计数器74LS590进行计数。
3 播种机工况故障采集系统软件设计
3.1 系统软件设计总体结构
播种机工况故障采集系统软件设计主要有包括机器行进速度处理,漏播、堵塞、种箱空识别,控制程序驱动显示模块进行显示与报警,计算播种作业面积和识别键盘模块输入的信息等。工况故障采集系统软件功能结构框如图5所示。
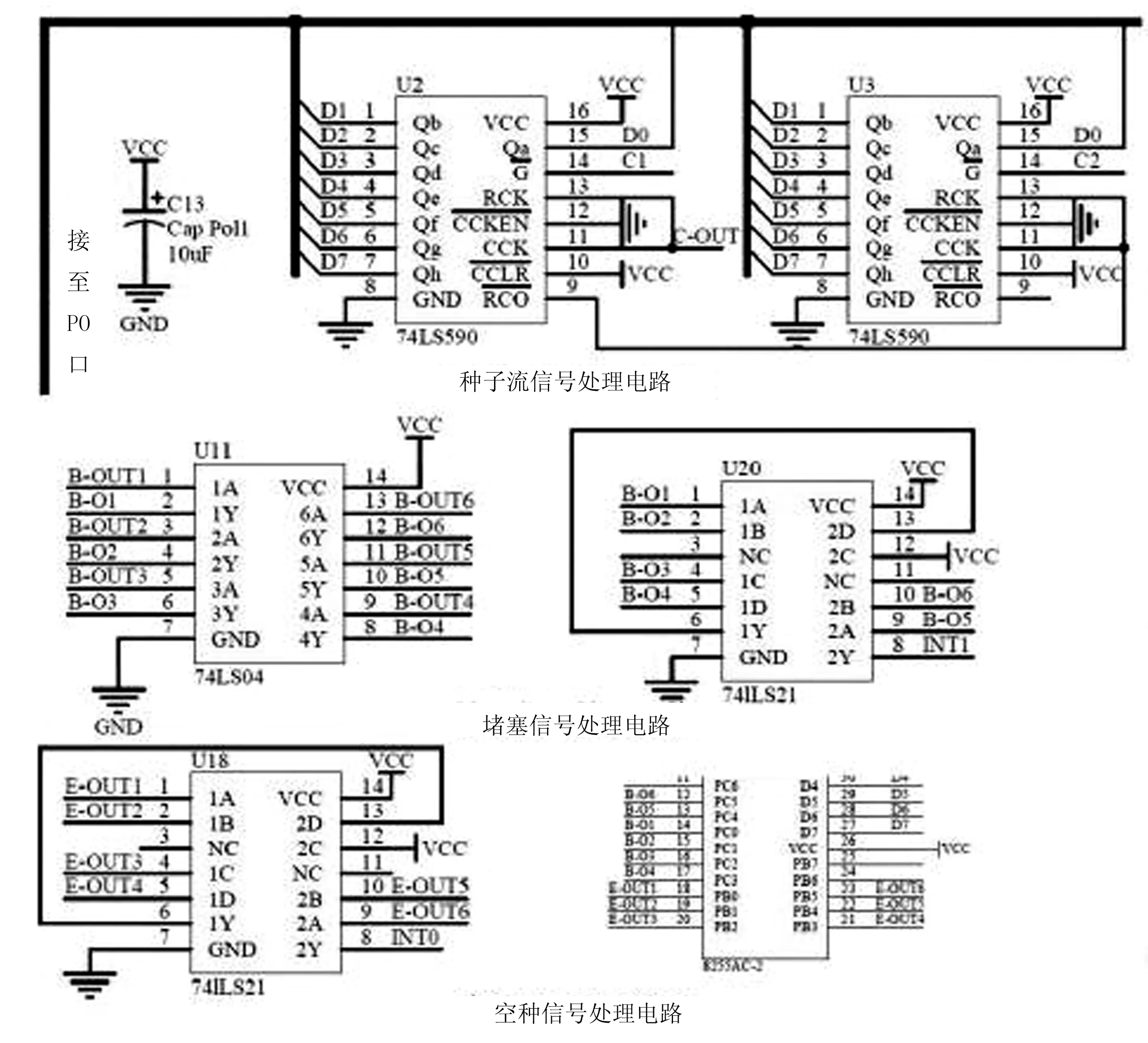
图4 传感器信号采集处理电路
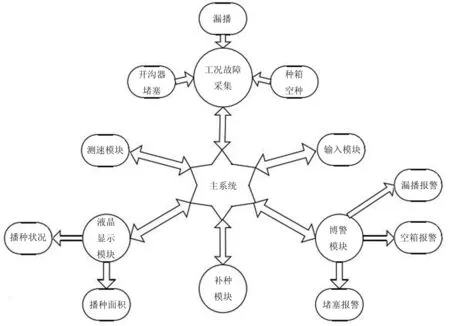
图5 工况故障采集系统软件功能结构框图
STM32微处理器资源分配主要有:T0用来计算速度脉冲数;T1用于做10ms基准时间发生器;INT0为种子箱空的外部中断;INT1设定判断堵塞定时器。
3.2 信息采集程序设计
信号采集系统部分的软件设计主要包括速度信息、播种量信息、漏播判断、开沟器堵塞和种箱空检测等4个方面的子程序。
1)速度信息采集子程序。本系统利用脉冲对机器行驶速度进行计算,设定1s为时间间隔,车轮转1圈共产生16个脉冲。速度采集以播种排种轮的转速为依据,然后在进行行驶速度及播种面积的计算,具体计算公式为
(1)
其中,C为脉冲数;N1为被测目标转动1周产生的脉冲数;D为被测目标直径。速度信息采集子程序流程如图6所示。

图6 速度信息采集子程序流程图
2)漏播判断子程序。漏播判断子程序以种子流检测传感器采集信息为数据来源,当在规定周期时间未采集到种子流数据信号时,则自动判定为漏播故障。漏播判断子程序流程如图7所示。
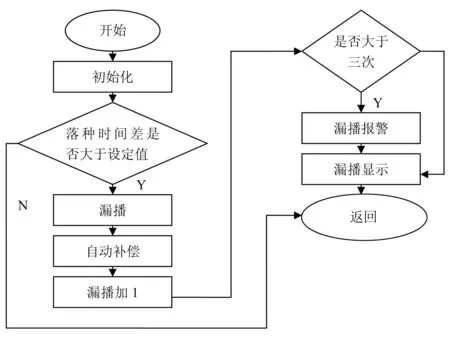
图7 漏播判断子程序流程图
3)种箱空判断子程序。当种箱空时,种箱上的位置传感器会向主程序发出INT0中断申请,主程序响应中断后,种箱空标志位被置位,其程序流程如图8所示。

图8 种箱空判断子程序流程图
4 试验与结果
为了验证播种机工况故障采集系统的可行性和有效性,本文对该系统进行实际应用试验,以验证系统漏播报警的准确率及其稳定性。在试验中,设定作业速度为6km/h左右,玉米种植株距为300mm,播种机安装排种器为10孔轮式排种器,种床带的速度为1.5m/s,每组试验落种500粒。试验因素水平如表1所示。实验结果如图9所示。
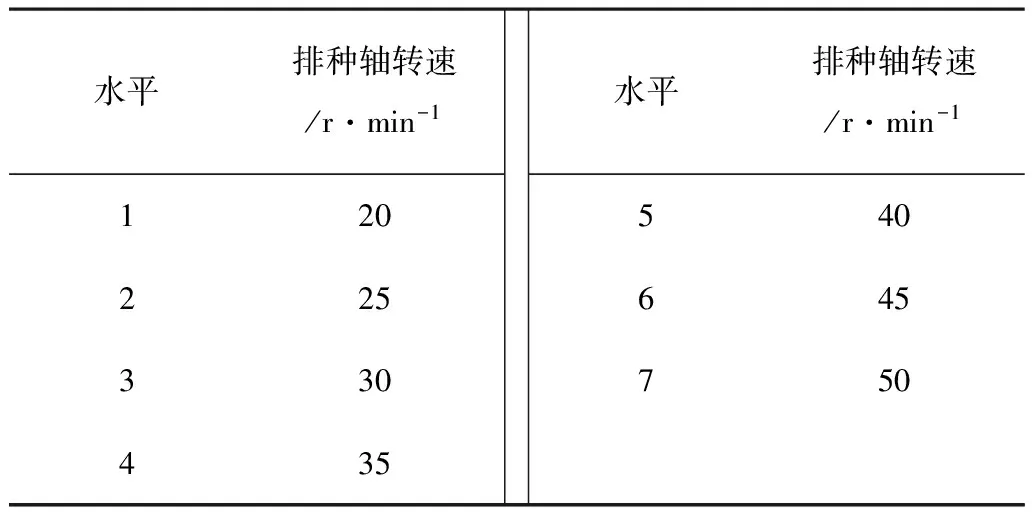
表1 试验因素水平表

图9 系统正确判断实验结果
试验因素水平测试表明:在一定干扰环境下,系统漏播报警的准确率均在97%以上,基本达到预期目标,实现了播种机工况故障采集功能;且该系统稳定性高,错误率低,可以有效节省播种环节时间,降低生产成本,具有十分宽广的实际应用前景。
5 结论
1)基于STM32微处理器设计和研发了播种机工况故障采集系统,系统以STM32微处理器为核心,硬件部分主要包括信息采集、人机交互、STM 32智能控制以及电机驱动等模块,主要作用是完成传感器节点的数据采集、分析、处理和控制功能;软件部分主要包括速度信息、播种量信息、漏播判断、开沟器堵塞和种箱空检测4个子程序。
2)试验结果表明:所选用的TAP-40LS40N1-D3传感器能够精准检测到种子流、种箱排空、输种管堵塞等信号;在一定干扰环境下,系统漏播报警的准确率均在97%以上,实现了播种机工况故障采集功能,且该系统稳定性高、错误率低,具有十分宽广的应用前景。
[1] 董宝军.精密播种机监测系统的设计及研究[D].济南:山东大学, 2011.
[2] 李雷霞, 郝志明, 杨薇,等.精密播种机排种性能检测系统的研制[J].农业工程, 2012, 2(8):16-19.
[3] 李北新. 大豆精密播种机电子监视仪设计探究[J].黑龙江科技信息, 2014(18):245-245.
[4] 汪宁.故障诊断技术在造纸控制中的研究与应用[D].西安:陕西科技大学, 2009.
[5] 赵晓娟.智能播种机排种性能测试系统设计[J].湖南农机, 2009, 36(11):12-14.
[6] 安鹤峰.播种机的技术现状及发展趋势[J].农业科技与装备, 2013(7):69-70.
[7] 郭志勇, 陈小永.基于μPSD3234的智能水位监测仪设计与实现[J].安徽电子信息职业技术学院学报, 2008, 7(4):69-71.
[8] 赵继成, 郭业民, 曾峰,等.基于ZigBee技术的播种机无线监测系统设计[J]. 农机化研究, 2013,35(12):189-192.
[9] 孔祥通, 王春平, 孙书鹰,等.基于STM32的多功能火控信号采集板设计研究[J].微型机与应用, 2012, 31(12):21-23.
[10] 王计新.免间苗谷物专用播种机的研究[J].农业开发与装备, 2014(7):62-65.
[11] 于健东.排种器漏播自动检测系统的设计与试验[D].青岛:青岛农业大学, 2011.
[12] 张本源.带清种槽窝眼式谷子精少量播种机的研究[J].农业机械, 2014(1):138-141.
[13] 周龙宝.蔬菜精密播种机的应用效果初探[J].农业开发与装备, 2015(7):63-64.
[14] 康丽梅, 王晓伟, 林静.精密播种机发展现状与前景分析[J].农业机械化与电气化, 2003(1):27-28.
[15] 雷明.基于单冲程频谱特征故障智能检测软件设计[J].科技通报, 2014(2):44-46.
[16] 张丽静, 闫英敏, 赵霞.基于DSP的火力控制板测试方案的研究[J].电子测量技术, 2010, 33(8):103-105.
[17] 冷小鹏, 刘敦龙, 韦方强.基于STM32微处理器的泥石流次声采集系统[J].计算机工程与设计, 2015(10):2689-2694.
[18] 王祺, 栗震霄, 冯全.免耕播种机播种的工况监测系统设计[J].甘肃农业大学学报, 2005, 40(2):229-232.
[19] 陶冶.基于SDI-12的播种机种肥监测系统设计与研究[D].大庆:黑龙江八一农垦大学, 2012.
[20] 陈广大, 马占辉, 马超,等.基于ARM的玉米免耕播种施肥机监控系统设计[J].中国农机化学报, 2016(5):130-133.
[21] 郭燕霞, 刘伟娜, 赵秋霞,等.精密播种微处理控制系统的研究[J].农机化研究, 2008(9):81-83.
The Design of Seeder's Malfunction Collection System Based on STM32 Microprocessor
Li Zhuoran
(Department of Electronic Information, Luoding Polytechnic College, Luoding 527200,China)
Along with the constant improvement regarding the level of information in China as well as the continuous development of Mechanic automation,computer controlling system and measurement industry. The intelligence control has been applied extensively in agricultural production,industrial manufacturing, advanced study and the like.Consequently,the seeder's malfunction collection and processing system is designed and created on the basis of STM 32 microprocessor.With the STM32 serving as the fundamental part, the system's hardware primarily include information collection, interaction between users and machine, intelligence control, alarming, auto-compensation,motor drive and so forth, which perform functions such as collecting, analyzing, processing and controlling the data of sensor node.The software of the system chiefly incorporate four subroutines known as speed status,seeding rate, judgement of miss-seeding, the detection of opener's blocking and vacant seed case.The results of experiment indicate that the selected TAP-40LS40N1-D3 is able to detect the seed flow,vacant seed case as well as the blocking of seed tubes.The accuracy rate of miss-seeding alarm reaches more than 97% under certain interference environment, which achieves the precise malfunction collection of the seeder.Furthermore, the system possesses high stability with low error rate, which means a wide application prospect for it.
STM32; seeder; working condition of fault collection; sensor
2016-06-30
国家级大学生创新工程项目(2015-2017)
李卓然(1989-),男,哈尔滨人,助教,硕士,(E-mail)714465653@qq.com。
S223.2;S24
A
1003-188X(2017)05-0215-06
猜你喜欢
煤气与热力(2022年4期)2022-05-23
纺织科学研究(2021年1期)2021-12-03
农业技术与装备(2021年3期)2021-12-01
防爆电机(2021年5期)2021-11-04
舰船科学技术(2021年12期)2021-03-29
今日农业(2020年22期)2020-12-14
铁道通信信号(2020年1期)2020-09-21
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
农民致富之友(2019年22期)2019-08-16
