
免耕播种机漏播图像采集与传输系统设计》——基于Android和4G通信
2017-12-16 09:15:55靳继红禹玥昀周开来
农机化研究 2017年5期
林 宏,靳继红,禹玥昀,周开来
(1.西南林业大学 计算机与信息学院,昆明 650224;2.焦作师范高等专科学校 计算机与信息工程学院,河南 焦作 454001)
免耕播种机漏播图像采集与传输系统设计》
——基于Android和4G通信
林 宏1,靳继红2,禹玥昀1,周开来1
(1.西南林业大学 计算机与信息学院,昆明 650224;2.焦作师范高等专科学校 计算机与信息工程学院,河南 焦作 454001)
免耕播种机是现代化农业耕种常用的农机之一,其漏播率是制约播种机作业质量的关键。为了降低免耕播种机作业时漏播率,提高播种机作业时智能化和自动化漏播监测水平,提出了一种基于Android和4G通信图像采集与传输的漏播检测系统,并将其成功地应用到了气动式免耕播种机上,完成了装置的安装和调试。采用小波算法对采集图像和信息进行了滤波处理,通过图像的去噪,降低了设备和耕种作业环境对播种机的影响。开发了手持终端的Android系统界面,包括漏播率报告、漏播次数显示、播种时长、田间作业历史数据和漏播报警等功能。最后,通过对历史漏播数据的查询,调试了系统的漏播检测功能,由调试结果发现:一天的作业累计漏播率小于1%,满足播种作业的设计要求,也验证了基于Android和4G通信系统播种机漏播检测系统的可行性。
免耕播种机;Android系统;4G通信;漏播检测;自动化
0 引言
我国已经进入了信息时代,信息化、智能化、网络化等已经成为了时代发展的代名词。在信息化的大背景下,如何将先进的信息技术与播种机的现代化设计结合起来,构建数字化、网络化的信息交互平台和网络服务体系,提高播种作业的现代化管理水平,是当前急需解决的问题。2007年,著名科技公司—谷歌公司发布了Android智能操作系统,该系统自发行起迅速占领了市场,并成为当前使用最广泛的智能操作系统之一。Android智能手机的广泛普及,为播种机播种作业监测技术的辅助决策系统提供了展现的平台,如果将其应用在播种机监测系统的设计上,可以有效地提高播种机作业的自动化水平,提高其作业质量。
1 基于Android系统漏播检测的免耕播种机设计
保护性耕作技术是当前使用的主要环保型农业耕作技术,关键是配套机具。在澳大利亚、美国和加拿大等国家对保护性耕作技术研究的较早,其技术已比较先进,并已经拥有了较为成熟的耕作工具。
图1为美国Case公司推出的SDX30型免耕播种机。该型播种机采用单圆盘开沟器,排种方式为气力式,可以在高茬覆盖地作业。由于有压缩空气系统,气力式排种方式可以适用于多种作物播种。

图1 CasesDx30 型免耕播种机
图2为国内现代农装科技股份有限公司推出的2BMG-18型免耕施肥播种机。该播种机也可以在无需耕翻的土壤上进行直接的作业,并一次性地完成秸秆切割、开沟、施肥、播种、覆土和镇压等工序,实现了完全的免耕播种。
图3为基于Android和4G通信的播种机漏播检测系统框图。系统基于Android系统架构,采用4G通信技术,可以将采集信息传送到Android手持设备终端,实现播种机漏播检测、漏播报警和历史数据查询等功能。

图2 2BMG-18 型免耕施肥播种机

图3 基于Android和4G通信的漏播检测系统框图
图4为使用Android 智能操作系统构建的播种机漏播检测辅助决策系统框架。该系统框架实现了云技术和Android系统的无缝对接,可以服务于大型作业农场的技术人员和农场领导决策人员。

图4 播种机漏播检测辅助决策系统
2 播种机漏播图像采集和传输去噪算法
在播种机漏播图像采集和传输过程中,受到摄像头采集设备和外部作业环境的干扰,图像会含有噪声,为了对漏播率进行准确监测,需要除去或者减轻获取图像的噪声。在图像去噪的过程中,首先建立一个含噪声的图像模型,该图像是由原始采摘图像加上一个随机噪声实现的,其表达式为

(1)
(2)
(3)
因此平均滤波的一般输出为
(4)

(5)
(6)

(7)

(8)

(9)
而离散化小波变换系数则可表示为
(10)
其重构公式为
(11)
对于播种漏播率图像的处理可以采用小波阈值的方法,其步骤为:
1)对噪声图像进行小波变换,得到一组小波系数Wj,k;


(12)
定义为
(13)
该方法一般称之为硬阈值估计方法,利用小波变换方法可以实现漏播图像的去噪,从而提高信号的输出精度。将采集数据得到的信息利用4G通信技术进行信号传递,最后将结果呈现在基于Android系统的手持设备上,实现播种机播种作业质量问题的实时预警,便于大型自动化生产。
3 播种机样机实验
本次设计的基于Android系统和4G通信系统具有较高的适应性,可以应用在大部分的气动免耕播种机上,本研究采用的试验样机如图5所示,并在样机上安装了漏播检测装置。

图5 播种机实验样机
该试验样机为气动式播种机,在试验时选择了信号状态良好的开阔地带,并可以成功接收手机4G信号,图像的采集采用漏播检测摄像头和传感器。漏播检测系统的Android界面如图6所示。
图7表示播种机漏播历史数据的实时查询界面。该数据是由播种机端利用4G通信技术将数据上传到Android系统手持设备的,当数据异常时可以对数据进行保存,并将数据上报给管理人员。
对多时间段的播种漏播数据进行查询后(见表1),得到的漏播检测数据。由表1可以看出:在不同时间段的漏播率有所不同,并且随着时间的增加,漏播率也有所提高;但是从一天的作业情况来看,累计漏播率小于1%,满足播种作业的设计要求,也验证了基于Android和4G通信系统播种机漏播检测系统的可行性。

图6 漏播检测Android系统主界面

图7 播种机漏播历史数据查询
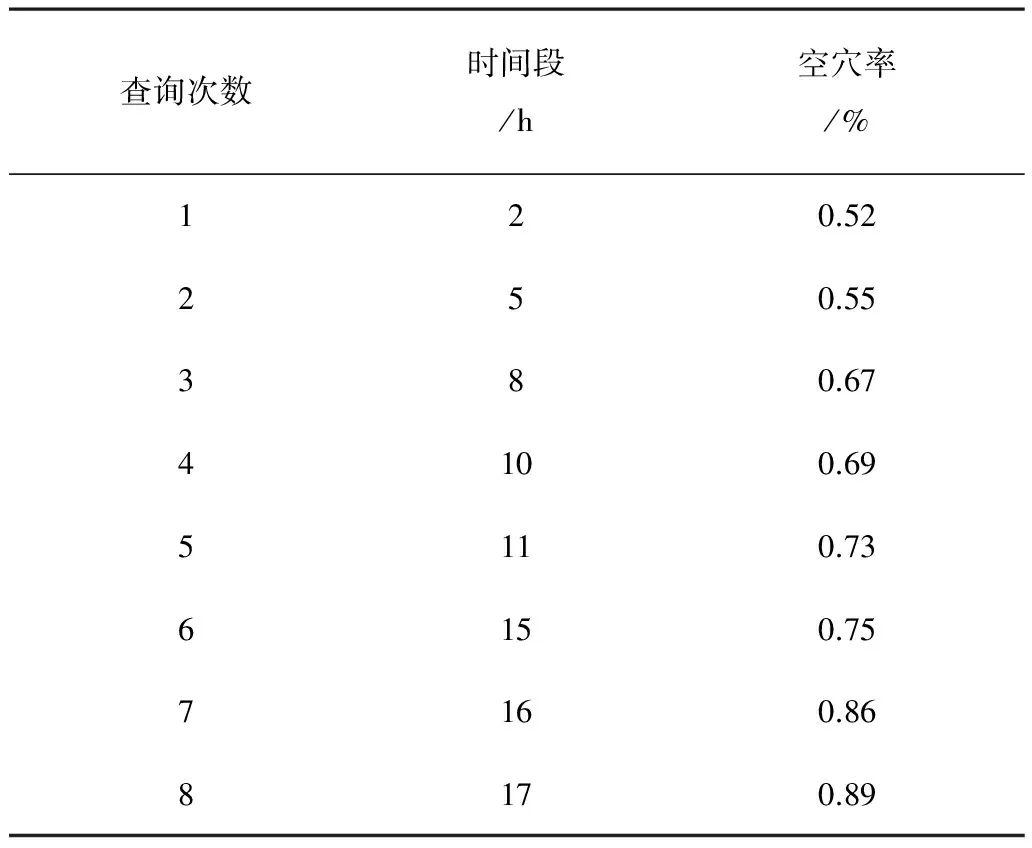
查询次数时间段/h空穴率/%120.52250.55380.674100.695110.736150.757160.868170.89
4 结论和讨论
为了提高播种机作业质量的实时监测水平,基于Android和4G通信技术,结合小波滤波去噪技术,提出了一种漏播检测系统,并将其成功地应用在气动免耕播种机上。为了方便系统的使用,开发了Android系统界面,利用4G无线网络通信技术,建立了移动终端与云服务器之间的数据交互,实现了农业技术人员实时上传已完成的播种作业管理数据。通过使用基于Android平台的智能移动终端设备,实现农业技术人员对所负责田块进行现场耕作作业信息采集等工作,革新了传统的人工纸质信息录入方式。目前,Android系统已逐渐渗透到人们生活中的各个领域,其广阔的应用前景,为农业的发展提供了一个新的方向。
[1] 陈桂鹏,严志雁,瞿华香,等.基于Android手机的农业环境信息采集系统设计与实现[J].广东农业科学,2014,41(13):178-181.
[2] 张安然.一种小型化智能农业管理系统的设计[J].中国农机化学报,2014,35(4):242-245.
[3] 马志欣,谭峰,侯召龙,等.基于Android的农业生产远程监控系统[J].农机化研究,2015,37(3):226-229.
[4] 王俊辉,曹静,凡燕,等.基于Android手机系统的农村信息服务平台[J].江苏农业科学,2013,41(4):370- 371.
[5] 杨林楠,郜鲁涛,林尔升,等.基于Android系统手机的甜玉米病虫害智能诊断系统[J].农业工程学报,2012,28(18):163-168.
[6] 张睿敏,唐占红,曹博,等.基于Android 的农业信息组合系统设计与开发[J].兰州工业高等专科学校学报,2012,19(5):12-14.
[7] 陈大鹏,毛罕平,左志宇,等.基于Android手机的温室环境远程监控系统设计[J].江苏农业科学,2013, 41(9):375-379.
[8] 孙小华,王福顺,杨会英,等.基于智能手机的农业信息服务系统研究[J].科技和产业,2013,13(6):33-36.
[9] 李健.基于 Android 的病虫害推理诊断系统的设计研究[J].安徽农业科学,2013,41(11):5148-5150.
[10] 李立君,李昕,高自成,等.基于偏好免疫网络的油茶果采摘机器人图像识别算法[J].农业机械学报,2012, 43(12):209-213.
[11] 王文庆,张涛,龚娜.基于多传感器融合的自主移动机器人测距系统[J].计算机测量与控制,2013,21(2): 343-345.
[12] 韦伟,周凌翱,刘青.一种便携式的红外测距系统[J].电子设计工程,2011,19(21):40-42.
[13] 刘金帅,赖惠成,贾振红.基于YCbCr颜色空间和Fisher判别分析的棉花图像分割研究[J].作物学报, 2011,37(7):1274-1279.
[14] 朱群峰,黄磊.温室移动机器人轨迹控制系统的设计[J].农机化研究,2009,31(4):73-75.
[15] 张卫东.我国温室发展的现状及发展建议[J].科技信息,2013(10):439.
[16] 李明,李旭,孙松林,等.基于全方位视觉传感器的农业机械定位系统[J].农业工程学报,2010,26(2):170-174.
[17] 傅锡敏,薛新宇.基于我国施药技术与装备现状的发展思路[J].中国农机化,2008(6):72-76.
[18] 傅泽田,祁力钧,王俊红.精确施药拉术研究进展与对策[J].农业机械学报,2007,38(1):189-192.
[19] 郭辉,韩长杰.精确施药技术的研究与应用现状[J].农业技术与装备,2009(10):42-46.
[20] 吕太国.静电喷雾系统特性研究[J].农机化研究,2009,31(5):54-70.
[21] 燕明德,贾卫东,张斌,等.国内外静电喷雾施药技术及机具研究[J].农业机械,2008(8):53-54.
[22] 刘金龙,丁为民,邓巍.果园对靶喷雾红外探测系统的设计与试验[J].江苏农业科学,2012,40(12):370-372.
[23] 李丽,李恒,何雄奎.红外靶标自动探测器的研制及试验[J].农业工程学报,2012,28(12):159-162.
[24] 裴文超,陈树人,尹东富.基于DSP和单片机的实时对靶喷施除草系统[J].农机化研究,2012,34(1):149-153.
[25] 张俊雄,马锃宏,李伟,等.基于土壤基质的播种精度检测试验研宄[J].农业机械学报,2012,43(12):62-66.
[26] 马锃宏,李南,王汉斌,等.温室株间电驱锄草控制系统设计与试验[J].农业机械学报,2015,46(1):89-93.
[27] 张二鹏,马锃宏,耿长兴,等.温室悬挂喷施机跨垄作业控制系统设计[J].中国农业大学学报,2013,18(6): 170-174.
[28] 马锃宏,李南,李涛,等.钵体苗带式供苗移栽机的设计与试验[J].中国农业大学学报,2015,20(3):216-222.
[29] 张春龙,黄小龙,刘卫东,等.苗间锄草机器人信息获取方法的研宄[J].农业工程学报,2012,28(9):142- 146.
[30] 胡炼,罗锡文,曾山,等.基于机器视觉的株间机械除草装置的作物识别与定位方法[J].农业工程学报,2013,29(10):12-18.
[31] 朱凤武,于丰华,邹丽娜,等.农业机器人研究现状及发展趋势[J].农业工程,2013,3(6):10-13.
Design of the Image Acquisition and Transmission System of No-tillage Seeding Machine Based on Android and 4G Communication
Lin Hong1,Jin Jihong2,Yu Yueyun1, Zhou Kailai1
(1.School of Computer Science and Information,Southwest Forestry University, Kunming 650224,China;2.School of Computer and Information Engineering,Jiaozuo Teachers College,Jiaozuo 454001, China)
No-tillage seeding machine is one of the commonly used agricultural machinery in modern agriculture.The leakage rate is the key to control the quality of the seeding machine. In order to reduce the leakage sowing rate of no-tillage planter, improve sowing machine intelligence and automation of leakage broadcast monitoring level,it put forward a kind of image acquisition and transmission of seed leakage detection system based on Android and 4G communication, and it successfully applied in the gas dynamic type no-tillage planter so as to complete the installation and debugging. The wavelet algorithm is used to filter the image and information,and the effect of equipment and the environment of cultivation on the seeding machine is reduced.The Android system interface of the handheld terminal is developed, which includes the leakage rate report, the number of missed broadcast, the long time of sowing,the history data of the field work and the alarm.Finally through the historical leakage sowing data query, debugging the system loss sowing test function,discovered by the debug results, homework a day cumulative leakage sowing rate of less than 1%,which can meet the requirements of the design of sowing, but also verify the based on Android and 4G communication system planter seeding the feasibility of detection system.
no-tillage seeding machine; Android system; 4G communication; leak detection; automation
2016-03-11
云南省应用基础研究项目(2011FB070);河南省科技攻关项目(152102110161)
林 宏(1981-),女,云南大理人,讲师,硕士。
禹玥昀(1984-),女,云南凤庆人,讲师,硕士,(E-mail)yuyueyun1984@163.com。
S223.2;TP391.41
A
1003-188X(2017)05-0206-05
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17 08:08:06
河北农机(2021年9期)2021-12-07 17:00:34
今日农业(2020年22期)2020-12-14 16:45:58
作文小学中年级(2020年6期)2020-07-24 08:33:10
农业与技术(2019年9期)2019-05-28 09:23:40
农业现代化研究(2016年5期)2016-10-27 08:11:11
雷锋(2016年4期)2016-05-30 02:09:48
学习月刊(2015年10期)2015-07-09 03:35:12
湖北农业科学(2015年3期)2015-04-07 14:24:02
新疆农垦科技(2014年10期)2014-02-28 19:21:14
