
基于多特征提取的遥感影像云检测算法研究
2017-12-07 09:47:41李超炜邓新蒲赵昊宸
数字技术与应用 2017年9期
李超炜+邓新蒲+赵昊宸
摘要:高分辨率遥感影像中存在大量的云噪声,这些云层对遥感数据的后续处理和传输产生不利影响。本文针对遥感图像中云层污染问题,对多光谱影像中云层亮度、纹理、频率等特征展开分析,通过样本统计了云层与下垫面在不同方面的特征差异。基于分析的结果,利用灰度共生矩阵和Gabor滤波器的各个特征值,依据特征的可分离度选择有效的特征,并对上述特征进行云检测。对检测为云的样本,近一步采用条件边缘膨胀优化云层边缘的检测精度。实验结果证明本算法对高分辨遥感影像的云层具有较好的检测效果。
关键词:遥感影像;高分辨率;云层特征提取;云检测
中图分类号:TN976 文献标识码:A 文章编号:1007-9416(2017)09-0124-04
随着空间科学技术的发展,遥感卫星的时空分辨率和光谱分辨率逐渐提高,已广泛应用于侦查、测绘、资源监测和深空探测。在光学卫星影像中,云层是可见光和红外波段主要的污染源之一。大量云层的存在影响了对地观测和地标提取,被云覆盖的遥感影像可用信息很少,却占用了系统大量的存储空间和传输带宽,进而降低了卫星数据的利用率,这对卫星有限的资源带来了不利影响。因此在遥感卫星影像的处理中,云层的检测十分重要。针对云污染的问题,有必要研究高效、快速地筛选含云影像及计算云量,从而有效提高卫星平台遥感图像的利用率。
目前针对云检测主要从亮度、纹理、频率三个方面出发,提取不同的特征组合来进行云层识别。常用的方法有分形维数[1]、灰度共生矩阵[2]、小波变换和Gabor滤波器[3]等。李志伟等[4]通过光谱特征提取主云区,再通过纹理特征局部二值模式LBP和形状特征周長面积比来优化云层检测结果,但该方法受相机辐射校正系数影响,该系数在一年中不固定,因此光谱特征的阈值设定不稳定。谭一华等[5]利用最大响应滤波器(Maximum Response)提取云层不同方向和不同尺度的纹理特征,得到8维特征矢量。该方法虽然充分地提取了云层纹理特征,但由于MR滤波器对纹理特征的计算量大,且云层没有明显的方向性,因此十分耗时。余长辉等[1]分别提取了平均灰度、方差、一阶差分和DCT高频系数、小波高频系数以及GCLM的特征值和分形维数,但特征之间有冗余,不利于后续云检测。李鹏飞等[2]仅利用平均梯度和灰度共生矩阵中的角二阶矩值来提取云层纹理特征作为SVM分类基础,未对云层光谱特征做分析。
目前的特征提取方法都建立在上述三个方面,但对各个特征值的选择并没有详细的论证和分析。基于此,本文在三个特征空间比较分析,通过样本的统计,基于可分离度的计算实现云层特征的优选。基于提取的特征矢量,采用SVM进行云层与下垫面的分类,对判别为云层子图的样本,通过条件边缘膨胀,进一步优化云层边缘提取,得到包含云层边缘的二值图像。实验结果表明本算法对遥感影像云层检测具有较好的效果。
1 多特征提取的云检测算法
1.1 算法流程
本算法的框架如图1所示,主要包括:样本特征提取、分类器训练、云子图判别以及云层边缘优化四个部分。
样本特征提取包括亮度、纹理和频率三个方面。基于样本子图计算特征矢量,分类器采用支持向量机,对云层子图进行判别。本算法有两个关键内容:特征选择和边缘优化,将在后续章节中详细阐述。
1.2 亮度特征提取
由于云层与下垫面具有不同的辐射率,在多光谱影像中反应为不同的亮度值。采用高分一号影像为样本,高分一号多光谱影像包含四个波段,分别为:B波段(0.45um~0.52um)、G波段(0.52um~0.59um)、R波段(0.63um~0.69um)和近红外波段(0.77um~0.89um)。
云层在不同通道的影像中相比下垫面都具有较高的亮度值,因此从RGB空间或某一通道的亮度值提取云层特征只能反映云层辐射强度。事实上,云层接近白色,R、G、B值近似相等,在HIS色彩空间中反映为亮度值高,饱和度低。如图2所示,云层在I通道有明显的亮度,但在S通道相比下垫面饱和度要低,因此本文在HIS空间中提取云层亮度和饱和度,作为辐射亮度值的特征。
1.3 纹理特征提取
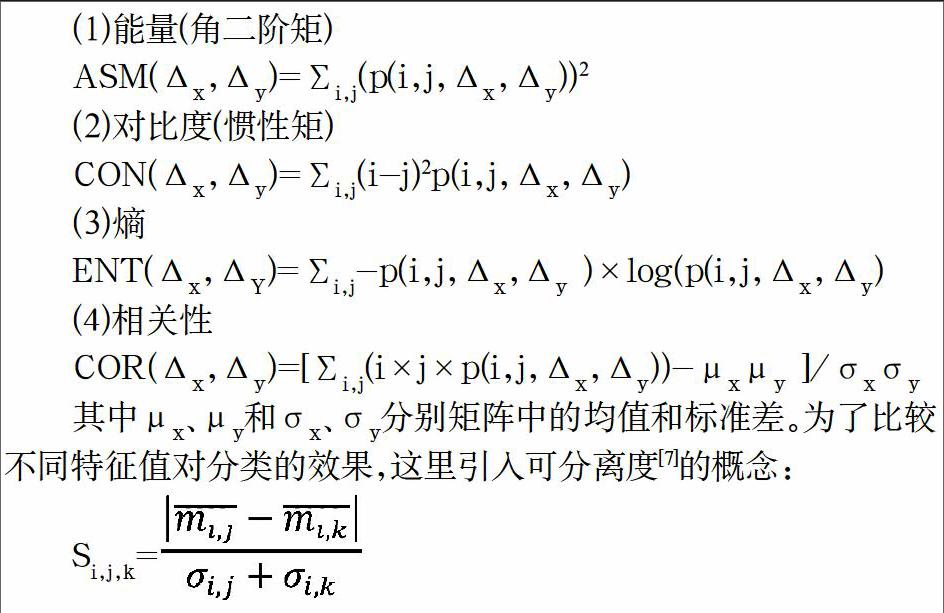
下垫面中如雪、冰、明亮的水体和建筑物等具有与云层相似的光谱特征,因此纹理特征对近一步区分云层中的杂质十分有效。常用的纹理特征有:灰度共生矩阵、分形维数、局部二值模式等。灰度共生矩阵由Haralick等[6]提出,主要利用纹理灰度级的空间关系,首先根据图像像素间的方向和距离建立共生矩阵,再从矩阵中提取出有意义的数值作为特征值,基于灰度共生矩阵,常用的纹理特征值有:
其中,Si,j,k是特征值vi在类Cj和Ck中分离度,和σi,j是特征值vi在类Cj中的均值和方差,和σi,k是特征值vi在类Ck中的均值和方差。分离度Si,j,k值越大,特征分离性越好。选取高分2号卫星图像的云和下垫面子(64×64)各500幅作为统计样本,云层样本包括卷云、层云等不同纹理的云样本,下垫面样本既包括森林、山丘、裸地等纹理特征复杂的区域,也包含海洋、湖面等纹理细节少的样本。部分样本如图3所示。
计算云层样本和下垫面样本各个特征值,结果如图4所示。
上述样本计算的分离度值如表1所示,可以看出相关性的分离度值最大,同质性和能量特征分离性其次,对比度的分离性最差。相关性表示图像中像素灰度的相似度,在灰度共生矩阵中的元素分布均匀、差异较小时,图像的纹理具有较好的延续性,图像相关性较大。对比度突出了图像中临近像元的反差,提取出了图像的边缘信息。如果原图像的灰度变化很快,则其灰度共生矩阵中主要零元素将偏离主对角线分布,即具有较大特征值。相反图像灰度变化平缓,其灰度共生矩阵中的主要非零元素将在主对角线附近分布,具有较小的对比度特征值。基于上述分析,本文选择相关性和同质性两个特征来描述云层纹理。endprint
1.4 频率特征提取
频率特征主要反映为提取不同尺度及方向下的纹理细节,常用的方法有:小波变换、Gaobr滤波器等。Gaobr滤波器是线性滤波器,主要针对图像边缘检测。Gabor滤波器的提出主要是解决Fourier变换不能提取局部信息,而进入时间局部化的窗函数。由于Gabor滤波器与人类视觉细胞的视觉刺激响应类似,能较好地提取目标的局部空间和频率域信息,因此其在视觉领域中是一种常用的图像预处理方式。由Gabor函数形成的二维Gabor滤波器能够较好地在空间域和频率域取得最优化,可以较好地表示相应于空间频率方位和方向选择性的局部信息,是常用的纹理表示和描述方法。
然而云层并没有明显的方向性,采用不同尺度、不同方向的滤波器对云层进行频率特征提取往往相互之间冗余性大,计算复杂度高。因此对不同的滤波尺度和方向,有必要根据其对特征分离的效果,选择分离度大的特征进行云层特征提取。选择64×64大小的云层样本与下垫面样本,分析Gabor滤波器不同中心频率与方向的特征分离度。如图5所示,图中为两个中心频率、四个方向一共8个Gabor滤波响应,分别以每个滤波响应的均值和标准差为特征值,计算16个特征的分离度。由图中可以看出云层和下垫面样本在不同方向的响应分离性相似,由于云层没有明显的方向性,因此不同方向的Gabor响应在中心频率相同时没有明显分离性。
以分离度做纵坐标,将每个方向,不同中心频率的Gabor响应分离度响应变化如图6所示。可以看出,不同方向的Gabor响应分离度均随着中心频率的减小(正弦载波波长的增加)而增加,在滤波波长增长到40um时趋于平缓,即分离度不再变化。同时,四个方向的分离度值最大均在0.6左右,135°方向的分离度值最大。为简化特征冗余度,选择每个方向正弦载波长为60um的Gabor滤波响应的均值和方差,共8维特征矢量描述云层频率特征。
1.5 条件边缘膨胀
将上述特征空间中提取的亮度、饱和度、相關性、同质性和8维Gabor滤波响应特征组成12维特征矢量用于SVM分类训练。由于多特征提取得到的为子图,为使检测结果接近真实云层边缘,这里对检测后识别为云层的子图进行条件边缘膨胀。在原图中提取云层子图的边缘,以边缘像素为原点,比较邻域像素与其的亮度差。对某一邻域点,若亮度差小于ρI(i,j)(I(i,j)为边缘点亮度,实验中ρ为1%~1.6%),该点就视为云层像素。每次条件膨胀后,以新增加的云像素点为原点进行下一次条件膨胀。实验中,迭代膨胀次数限制为4,并且在膨胀时新增加的云像素点小于N(本文为100)则视为云层像素已膨胀完,提前停止迭代。
2 实验结果与分析
本文中云检测实验分为两部分:云层样本训练和测试图片检测。云层样本来自GF-2遥感影像,部分样本如图3所示,尺寸大小为64*64。所有测试图均为1024*1024大小,每张图也分为大小为64*64的子图。训练样本和测试样本均包含两类:云层和下垫面。如图7所示,测试图包含厚云、薄云、卷云和积云等不同类型的云层。下垫面包含海洋、山峦和农田、沙漠等。实验包含:样本训练、图片分割、特征提取、云层判别。采用SVM对样本进行训练,基于判别模型对子图属性进行判定。若子图识别为云层,则标记为1,否则标记为0。
结果如图8所示,本文采用目视判别实验结果。可以看出,对不同类型的云层,本算法都能较好地检测出主要云区。分别统计样本总数m与正确判为云的样本数量n,得到云检测精度为93%。对于错误的判别结果,一方面是因为部分子图属于云层与地物混合,难以准确判别其是云层还是下垫面;另一方面,由于样本尺寸小,上述特征矢量难以准确描述所有样本的特点。后续研究可以针对云层选取描述性、分离度更好的特征矢量,对于云图样本采用软分割而不是硬性分为矩形子图,从而更好地检测云层边缘。
3 结语
本文针对高分辨率遥感影像中大面积云层覆盖的问题,研究了基于云层特征提取的云检测算法。通过对高分2号卫星样本特征值的统计分析,得到灰度共生矩阵和Gabor滤波响应各个特征值在不同参数下的分离度,进而采用具有区分性的特征。对于辐射特性,本文采用HIS空间的亮度和饱和度。对SVM的分类结果,采用边缘条件膨胀,进一步优化云层边缘的提取结果。实验结果表明本文算法对遥感影像中的云层具有较好的检测效果。
参考文献
[1]Yu Changhui, Yuan Yuan. Cloud detection method based on feature extraction in remote sensing images[J].ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences,2013,(05):173-177.
[2]Pengfei Li, Limin Dong and Huachao Xiao. A cloud image detection method based on SVM vector machine[J]. Neurocomputing 2015,16(9):34-42.
[3]Zhenyu An, Zhenwei Shi. Scene learning for cloud detection on remote-sening images[J]. IEEE Journal of STIAEOARS, 2015,20(3):1-17.
[4]Zhiwei Li, Huanfeng Shen. Multi-feature combined cloud and cloud shadow detection in GF-1 wide field of view imagery[J]. Remote Sensing of Environment, 2017,19(1):342-358.
[5]Yihua Tan, Ji Qi, Feifei Ren. Real-time Cloud Detection in high resolution images using maximum response filter and principle component analysis[J]. 2016 IEEE IGARSS.
[6]J.Munkres. Algorithms for the assignment and transportation problems J.Soc. Ind.Appl.Math.1957,5(1):32-38.
[7]R.Osada, T.Funkhouer, B. Chazelle, D.Dobkin. Shape distributions. ACM Trans.Gr.2002,21(4):807-832.endprint
猜你喜欢
雷达学报(2020年3期)2020-07-13 02:27:16
航海(2016年6期)2017-01-09 11:28:24
太空探索(2016年3期)2016-07-12 09:58:46
科技视界(2016年13期)2016-06-13 12:01:14
中国科技博览(2016年1期)2016-04-25 20:19:32
中国医学装备(2015年10期)2015-12-29 12:00:24
现代电子技术(2015年17期)2015-09-23 21:35:58
太空探索(2015年8期)2015-07-18 11:04:44
电脑知识与技术(2015年13期)2015-07-13 13:10:26
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:19
