
基于单片机的智能循迹小车设计
2017-12-06 09:57段焜
电子测试 2017年20期
段焜
(江苏安全技术职业学院,江苏徐州,221011)
基于单片机的智能循迹小车设计
段焜
(江苏安全技术职业学院,江苏徐州,221011)
智能循迹汽车是汽车电子、人工智能、机械制造等多种学科领域的结合体,具有较高的应用价值。智能循迹小车运用单片机为基础进行设计,同时利用传感器进行识别赛道的信息,接着在利用传感器检测智能车的加速度及其速度,实现快速稳定的循迹进行行驶。智能汽车研究也越来越受到关注,智能汽车的适应能力较强,可按照事先的轨道进行自行运作,不需要路径管理,即可完成预期目标。在科技发展迅猛的现代化社会,汽车普及率也已经处于高峰状态,不少汽车制造商提出无人驾驶的概念,比如:特斯拉,因此设计具有很高科研价值。
单片机;智能;小车设计
1 智能循迹小车的结构组成和设计
智能循迹小车的车体结构如图1可以看出,智能遁迹小车的主要结构是控制电路板和传感器,电机和底盘部件几个主要部分组成。
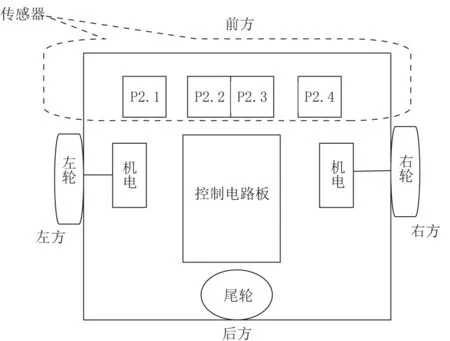
图1 智能遁迹小车车体结构
智能遁迹小车是单片控制电路遁迹电路、避障电路、电动驱动电路几个部分组成。其中系统总框架可以在图片2中看出,智遁迹以AT89S52单片机作为整个控制电路板的核心内容进行外接控制电机和红外传感器的使用。再者,智能遁迹小车使用来驱使舵机来完成小车你最基本的动作,换句话说,就是完成智能遁迹小车前行和后退、左转、右转、停止、掉头等基本的任务功能。从传感器的角度分析,智能遁迹小车从选择上是选择了QTI红外传感器来探测地面上的黑白斑马线,并在小车车体的下方分别安装上4个QTI传感器,与此同时,传感器的信号是连接着单片机的四个小脚,基于单片机的传感器就可以检测到信号,并控制小车的不断前行。最后,智能遁迹小车的底部可以安装电池盒和底盘木本和尾轮还有左右轮一些部件,下车前行的两侧分别是驱动轮,在校车后面有一个尾轮作为支撑,这样智能遁迹小车在隐形的过程中就可以进行灵活性并自由的进行遁迹活动。
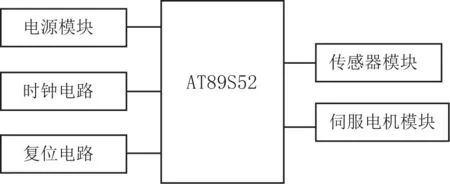
图2 系统框架
2 智能遁迹小车硬件设计
2.1 伺服电机
伺服电机中的伺服舵机在悬着的时候可以按照指令进行控制小车的位置和速度的快慢,输入线,分别是红黑白三种颜色,其中红色的电源线,黑色是代表着底线,白色的是信号控制线,伺服舵机内部有一个基准电路,能够产生信号的宽度和另一个比较器,可以进行基准信号和外加信号的比较,来判断方向和大小,进而产生电机转动信号的产生。脉冲序号是经过零点表进行标定后,不会自动旋转的伺服电机,如果发现这个时候的伺服电机发生了旋转,就表示该点击需要进行标定,在高电平持续时间为一点三毫秒时候,电机进行顺时针的高速旋转的形态出现,当高电平持续时间为一点毫秒时刻,电机进行逆时针的高速行驶。
2.2 循迹传感器
2.2.1 传感器选择
传感器的原理和传感器的连接,QTI是通过一个发光的二极管和一个光敏三极管耦合进行得到了一个和光敏相似得电阻,对信号等电平进行控制,传感器是一个雷士黑色的表面,反光的效率相对极小,光敏三极管并不存在导通作用。因此可以看出,三极管及其电容组成的RC电路是在时间常数相对较大,电压大部分在三极管的两端,,相反,如果传感器的经过表面比较的亮和光滑,反射率就会太高。
2.2.2 小车遁迹策略
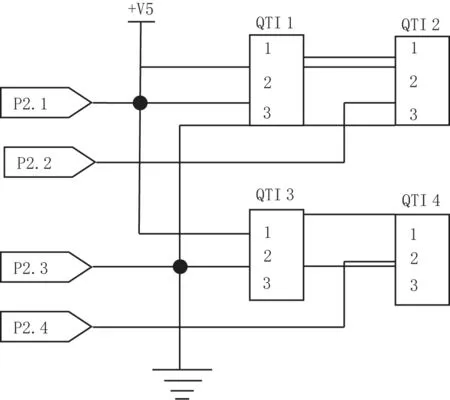
图3 小车循迹策略

图4 小车循迹策略
把四个QTI传感器信号线连接到小车想用的I或者0端口,选定对象P2中的P2.1、P2.2、P2.3、P2.4进行相关信号线的连接,使用不同颜色的线有助于检查时候是否错误,方便快捷。
图3、图4可以看出,传感器是集中在一条直线上的,而P2.2、P2.3引脚第一级向上传感信号,其中的P2.1、P2.4是第二级出纳干信号。智能遁迹小车在前行的过程中,如果出现黑线就会在第一条传感器的下面,如果小车发生了偏离现象,传感器就会检测出错误并及时纠正,把小车带入到正确的轨道中去。第二级唇干器在实际的运行中是第一级传感器的后备装置,如果小车偏离的角度较大,就会使用第二级出现进行纠正,从而就可以保证小车的正常行驶,提高了小车的遁迹可行性和可靠性。
3 智能遁基本动作设计
3.1 小车基本动作实现
智能遁迹小车在前行的过程中,如果从不同的方向和角度进行观察转动轮子的方向,其实是不一致的,也是不一样的,左边的是逆时针,右边的是顺时针的进行开动。智能遁迹小车在同样的道理驱使下,小车在做其他的动作时刻,也可以对其轮子进行方向上观察,根据相关的实验可以看出,改变小车的速度时候,我们可以通过控制参数的变化来改变小车的速度大小,小车的两个轮子速度和方向控制着小车的自身的方向和速度,因此,在C语言上,可以直接利用LEFT和RIGHT来表示左右轮子的参数进行用for循环来说实现控制脉冲的数量。
3.2 循迹功能实现
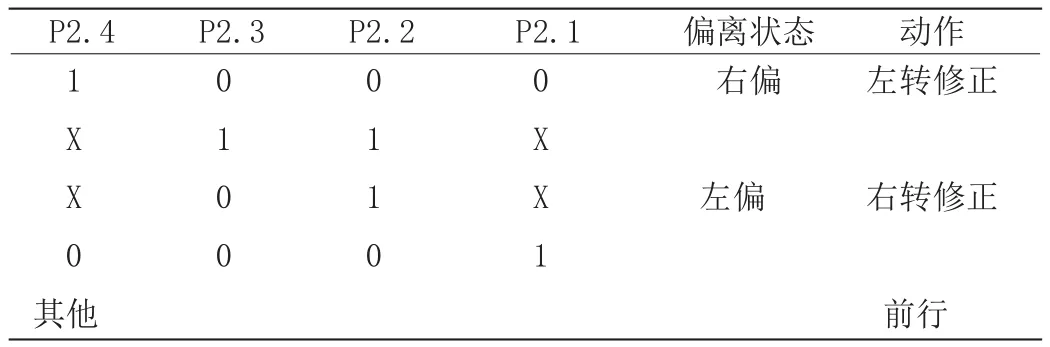
表1 循迹功能
从表格1可以看出,智能小车的遁迹策略是相同的,在传感器的测试基础上进行调用move函数进行完成长期的循迹过程,并对其进行进一步的修正和优化,假如:智能遁迹小车走向白色的线就会出现自动停止的现象,从一条黑线走向另外一条黑线就会出现不少的功能和现象,根据提到的智能遁迹小车的使用方式和设计方法,可以看出,在此种设计方式上,智能遁迹小车可以进行智能平稳的形式,基本上不存在偏离的现象,在进行转弯和掉头的过程中也可以很好的进行运行,保证小车的正常速度。
4 总结
想要设计一套高精度、高稳定的智能遁迹小车,需要对其进行硬件电路和循迹控制及其软件的实现进行详细的解说,并对小车的小转弯和大转弯进行的灵敏度进行加强,让小车可以顺利的进行转弯和通过,并对小车倾斜线转弯的处理进行变速和提高,还需要保持在不偏离路径的基础上进行调节。智能遁迹小车的设计涉及的方面十分多,在小车设计中,单片机和传感器是十分重要的课题,不同的单片机智能遁迹小车的性能也就不尽相同。把AT89S52作为单片机的核心,QTI红外传感器作为基础进行的循迹小车,在传感器输送信号的过程中,对小车进行智能性的控制,实现小车的前行、后退、左转、右转、掉头等一些列的活动,此方法的智能遁迹小车具有很强的运行能力,也可以更好的控制小车运行的过程和方向。
[1]张焕梅.基于单片机的自动循迹小车控制系统的设计[J].机械工程与自动化. 2017(05).
[2]董雷刚,崔晓微,张丹,张华,安向明.复杂路况下的智能循迹小车方案设计[J]. 电脑知识与技术.2014(07).
[3]马家庆,于兆勤,刘建群,黄惠敬,陈炜楠.自动循迹机器人控制系统的设计[J]. 教育教学论坛.2014(20).
Design of intelligent tracking car based on MCU
Duan Kun
(Jiangsu safety technology, Career Academy,Xuzhou Jiangsu, 221011)
The intelligent tracking car is a combination of artificial intelligence, automotive electronics,machinery manufacturing and other fields, has higher application value The use of single-chip intelligent tracking car based on the design, at the same time using the sensor to identify the track information,then the acceleration and velocity is detected by a sensor of intelligent vehicle, achieve rapid and stable tracking of driving More and more attention has been paid to the research of intelligent vehicle The adaptive ability of smart vehicle is stronger It can operate automatically according to the prior track Without the management of path, the desired goal can be achieved. With the rapid development of science and technology in modern society, the popularity rate of automobiles has also been at its peak Many automobile manufacturers have proposed the concept of unmanned driving, such as Tesla, so the design has high scientific research value
single chip microcomputer; intelligence; car design
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
快乐语文(2020年36期)2021-01-14
微特电机(2020年11期)2020-12-30
科学大众(2020年17期)2020-10-27
文苑(2018年22期)2018-11-19
电子制作(2018年17期)2018-09-28
电子制作(2018年8期)2018-06-26
通信电源技术(2018年3期)2018-06-26
电子制作(2017年1期)2017-05-17
电子制作(2016年11期)2016-11-07
