
倾斜摄影与近景摄影相结合的山地城市实景三维精细化重建与单体化研究
2017-12-05 07:01魏文杰李朋龙
测绘通报 2017年11期
连 蓉,丁 忆,罗 鼎,魏文杰,李朋龙,林 熙
(重庆市地理信息中心,重庆 401121)
倾斜摄影与近景摄影相结合的山地城市实景三维精细化重建与单体化研究
连 蓉,丁 忆,罗 鼎,魏文杰,李朋龙,林 熙
(重庆市地理信息中心,重庆 401121)
无人机倾斜摄影实景三维模型是一种能够对复杂山地环境较好感知和表达的有效手段之一。本文针对复杂山地城市开展倾斜摄影实景三维存在的问题,提出了适应于山地区域的多尺度的影像获取策略,并通过与近景摄影测量融合建模的方法,实现了对山地城市倾斜摄影实景三维模型精细化建模的目的;同时,对实景三维模型的单体化方法进行了介绍及对比分析,对后期山地城市开展倾斜摄影提供了一定的技术参考。
山地城市;垂直起降无人机;实景三维模型
近年来,随着无人机技术和倾斜摄影技术的快速发展,利用无人机搭载多镜头传感器进行倾斜摄影,快速生成城市的实景三维模型,已成为获取三维地理信息数据的重要手段[1],其真实、高效地对地面人工建筑和自然地表同时获取与表达的特点,更能准确直观地表达出复杂山地环境下的立体地表空间。但是,在实景三维模型的应用过程中发现,其存在“可远观不可近看,可浏览不可查询”的问题,这些问题直接制约着倾斜实景三维模型更为广泛的应用,解决该问题是其深入到行业应用的关键,因此本文从实景三维模型的精细化及单体化两方面进行探讨研究,对进一步提高山地环境下实景三维模型精细化程度和实景三维模型单体化应用提出建议和参考。
1 研究思路与技术路线
无人机倾斜摄影实景三维建模具有数据获取效率高、模型效果更真实、细节更丰富、建模成本更低等诸多优势[2],但因重庆复杂的山地情况及空中摄影采集角度的局限,对建筑贴近地面区域及被屋檐遮挡区域会造成地物的细节纹理信息不足或丢失,导致实景三维模型放大后会存在局部拉花及漏洞等问题,为了解决该问题,本文尝试从前端优化数据采集和后端倾斜与近景融合建模的方式进行实景三维模型精细化重建的方法研究。单体化方面,对现阶段行业中各类单体化方法进行试验及对比分析,具体技术路线如图1所示。
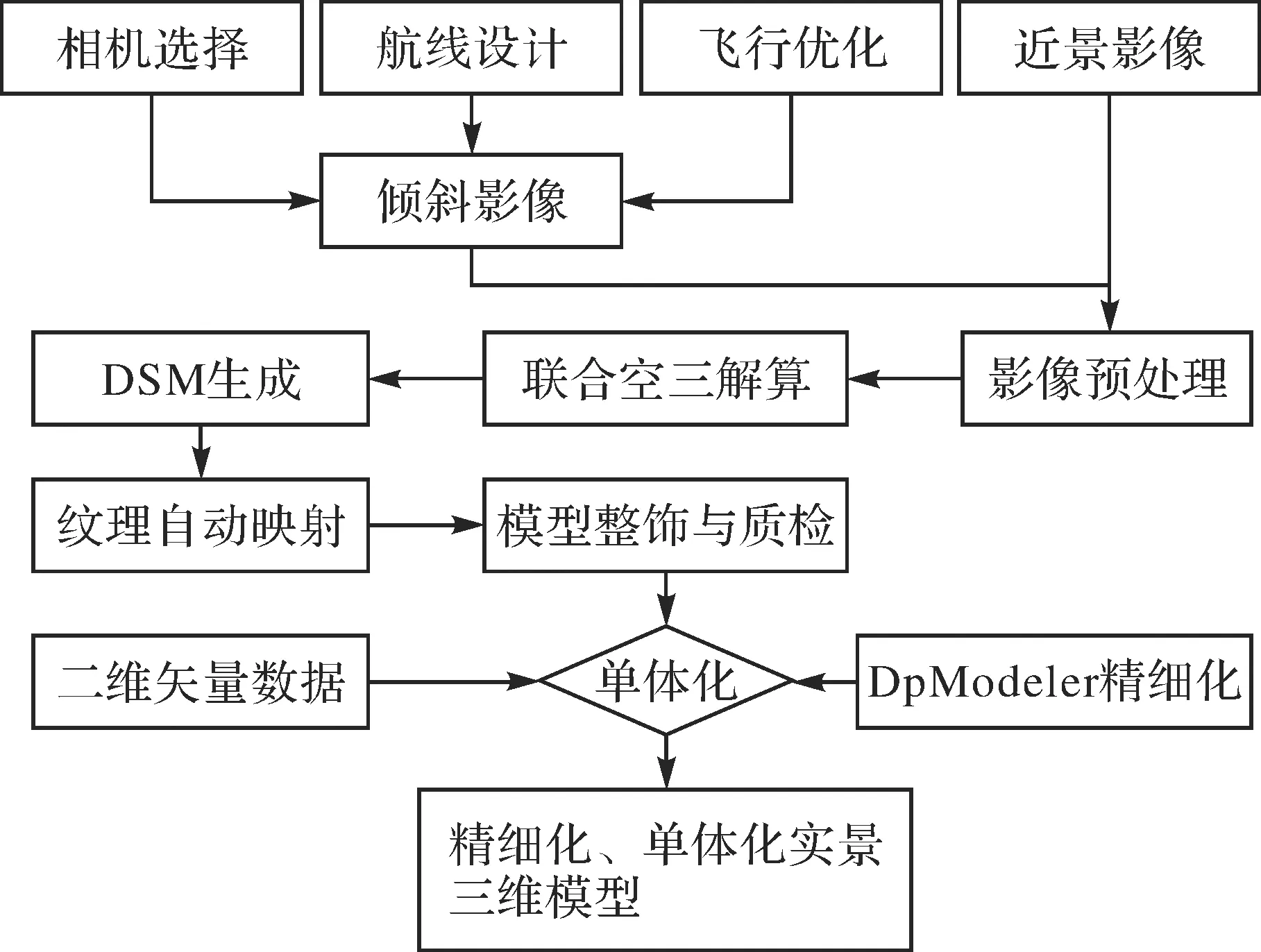
图1 技术路线
2 无人机倾斜摄影系统
2.1 垂直起降无人机飞行系统
用于影像获取的无人机飞行器主要有旋翼无人机和固定翼无人机两类[3],其中旋翼无人机系统对起飞着陆地点要求较低,能够垂直起降,但其载荷较小,续航能力较短,一般为15~30 min[4],如图2(a)所示。固定翼无人机一般采用弹射或手抛式起飞,然后受螺旋桨或涡轮发动机产生的推力向前飞行,具有飞行速度快,运载能力大的特点[3],如图2(b)所示,但因其需要采用伞降或直接着陆等方式进行降落,因此对起降场地要求较高。为了更好地发挥两类无人机的优势,很多无人机生产厂家将旋翼无人机和固定翼两种无人机进行了结合,研发了垂直起降式无人机,其具备固定翼无人机的长航时、大载荷,同时具有旋翼无人机的垂直起降能力[5],如图2(c)所示,特别适用于复杂山地城市环境下无人机起降及多镜头相机系统搭载,能够执行大面积的遥感数据资源获取任务。

图2 无人机飞行器
垂直起降固定翼倾斜摄影采集系统主要包括飞行器系统、倾斜相机系统、飞行控制系统、地面控制系统以及差分GPS系统[5]。作业过程中,首先在地面控制系统中按照作业规范及要求进行任务区航线规划,然后与飞行控制系统进行数据传输,输出航线规划数据,飞行器搭载倾斜相机系统按照航线规划进行飞行作业,地面控制系统同时接收飞机飞行轨迹和状态信息对作业过程进行时时监控。在实施飞行作业前,地面差分GPS系统开启,开始接收卫星信号,飞机实施作业后与地面差分GPS系统同时接收卫星信号,实现后差分卫星定位解算,以提高GPS定位精度,在飞行过程中,如遇紧急状况时,可切换成手控操作飞行进行辅助降落。
2.2 倾斜摄影系统
为了获取更多的地物纹理信息,往往需要在飞行平台搭载多个相机,受飞行器的载荷所限,相机系统组合主要有两镜头、五镜头以及单镜头,在飞行过程中,多个相机系统采用同步曝光方式采集地面不同角度的影像信息,同时通过POS系统获取与每组曝光影像相对应位置及姿态信息,从而得到用于实景建模的影像及位置姿态文件[6、2]。
2.2.1 五镜头倾斜相机
五头倾斜相机是由5个相机进行拼接组合,如图3(a)所示,通过一次飞行,分别从前、后、左、右、垂直5个方向对地物进行拍摄[2]。优点是采集效率高、地物成像重叠度大;缺点是设备较重,需配合载荷较大、续航能力较长的无人飞行器进行搭载。
2.2.2 两镜头倾斜相机
两镜头倾斜相机是由2个相机按照一定角度进行拼接集成,如图3(b)所示。采用2镜头倾斜相机通过一次飞行只可获取2个角度的影像,因此需要进行航线交叉飞行,最后补飞正下视影像。两镜头相机优点是设备轻,较为灵活,可利用旋翼无人机进行搭载;缺点是,同一区域需要飞行两次,还需补拍正下视,影像采集周期长。
2.2.3 单镜头相机[7]
单镜头倾斜采集是用可实时调整云台的旋翼无人机,如图3(c)所示,镜头朝向目标建筑,进行单镜头连续拍摄或环绕飞行。
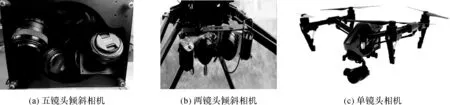
图3 无人机倾斜相机
3 山地城市实景三维精细化建模研究
3.1 影像获取
3.1.1 多尺度的倾斜摄影数据获取
实景三维建模对原始影像分辨率要求较高,而受相机焦距所限,飞行的相对高差一般在100~300 m之间,而山城重庆,城市依山而建,形成了城在山上、山在城中的城市格局[8],通过一次飞行获取的影像地面分辨率相差较大,影响最终模型效果的统一性,且很难按照传统方式进行分区航摄,因此在复杂的山地城市环境下进行倾斜摄影,需要多种作业模式结合,针对不同重建目标,形成不同的影像获取方案。通过研究测试,建议在城市级的大场景倾斜影像数据获取过程中,首先可采用垂直起降长航时固定翼无人机搭载五镜头倾斜相机系统,相对航高500 m左右进行数据获取,在此基础上,对区域内高程较低的建筑区采用轻型电动固定翼或旋翼无人机搭载两镜头倾斜相机,相对行高300 m左右进行加密飞行;然后对古建筑、地标性建筑可采用旋翼单镜头无人机,贴近建筑或环绕建筑飞行,获取更多侧面纹理,通过多尺度的影像获取策略,保证实景模型建模效果。
3.1.2 地面近景拍摄
地面近景拍摄可采用单反相机、手机、手持云台等各种方式,首先需要确定地面与空中采集影像具有一定的重叠范围,然后按照建模分辨率的要求及所采用设备的焦距计算合适的拍摄距离。
近景拍摄实施过程中,最好选择定焦镜头,不建议使用闪光灯、光学防抖、数码变焦等功能。拍摄航向重叠度约70%-80%,旁向重叠度约为60%-70%,两张连续照片之间的拍摄夹角小于15°。本次试验采用GigapanEPIC Pro智能云台辅助全画幅单反相机,按照拍摄目标制定航线及重叠度,可以进行自动化的近景拍摄,能够尽量避免影像采集不规范而给后期数据处理带来难度。地面近景拍摄如图4所示。

图4 地面近景拍摄设备
3.2 融合建模
ConTextCapurecent实景建模系统支持多种数据源融合建模[9],采集端获取的多尺度影像,如果都带有地理坐标,可将所有影像一起进行联合建模,如果获取地面近景影像无对应的地理坐标,则需要分别处理。利用ConTextCapurecent进行多源数据融合建模,首先对空中倾斜摄影数据和地面近景拍摄数据分别进行空中三角测量,获取每一张影像的外方位元素同时生成三维尺度的、高密度的点云,并将二者融合,然后基于融合后的空三成果和点云数据提取深度图并构建三维TIN,同时对三维TIN进行平滑和简化,最后根据三维TIN的空间位置信息,获取最佳视角的原始影像,自动映射纹理,即可形成高精度的实景三维模型。
对重庆市某区域采用本文所提出的多尺度的影像获取和与近景摄影测量融合建模两种方式进行了试验研究,通过获取的多尺度的影像联合建模,模型效果有明显提升。图5(a)、图5(d)为五镜头倾斜数据直接建模效果;图5(b)为在五镜头的基础上采用两镜头加密后的建模效果;对于屋檐遮挡区域采用与近景融合的方式进行实景建模其侧面纹理效果有很大提升,如图5(c)所示;对于高层独立建筑、如塔等,采用旋翼无人机环绕飞行对其实景模型效果改善显著,如图5(e)所示。

图5 精细化建模效果
4 实景三维模型单体化
4.1 物理单体化
物理单体化是通过人工重建的方式将地面、建筑、道路及城市部件形成一个可被选中分离的实体,可以附加属性,可以实现查询统计、分析等功能[10]。目前可以实现物理单体化的软件主要有DPModeler、SVSModeler及Oblique Sketch等,这三款单体化软件都是以倾斜影像的空三加密成果为基础,然后进行建筑边界提取、自动纹理映射及三维场景重构等过程,其中DPModeler是国内较早的一款实景三维重建软件,应用较广;SVSModeler是将立体测图系统及3ds Max进行了功能集成,工作人员需带立体眼镜在立体环境下进行数据采集,然后根据采集的建筑边界自动生成三维模型;Oblique Sketch是基于Sketchup进行的开发和集成,充分发挥了Sketchup高效、简单易用的优势,上手较为容易,对作业人员要求较低。本文以DPModeler为例,详细介绍物理单体化的实现过程。
4.1.1 DPModeler物理单体化技术路线
DPModeler是一款可对三维模型进行精细化修饰的单体化软件[11],其可针对第三方建模软件(ContextCapture、街景工厂、Photo Mesh)自动建模的成果进行单体化精修、悬浮物删除等工作,可得到精细化模型,达到后期应用要求,其单体化精修流程如图6所示。

图6 DPModeler软件单体化流程
4.1.2 DPModeler物理单体化过程
利用倾斜摄影可实现单张影像测量原理,在垂直影像上获取顶部结构,四周倾斜影像上获取房屋立面结构信息,对其进行推拉、编辑、调整得到最终模型。利用倾斜摄影建筑物侧面纹理可采集的特点,实现模型贴图自动从影像中采集,一键完成模型贴图,从而实现单体化模型精修效果,如图7所示。
4.2 逻辑单体化
逻辑单体化是指利用已有的房屋面、道路面等二维矢量数据,通过与三维模型进行叠加、高亮显示,并通过矢量面进行属性信息挂接,从而实现可被单独选中、查询并赋予属性的效果。本研究结合Skyline、SuperMap两款软件进行了单体化测试。如图8所示。
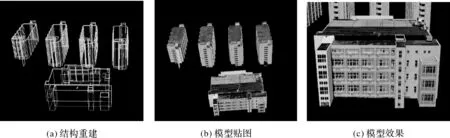
图7 DPModeler单体化过程
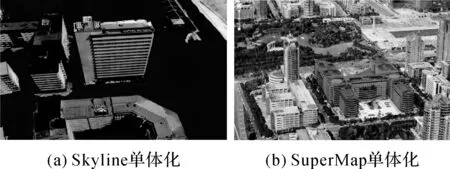
图8 逻辑单体化效果
4.3 单体化对比分析
本文对物理单体化和逻辑单体化两种单体化方式的优缺点进行了对比分析,其中物理单体化软件都可对模型进行精细化及单体化处理,但其需要逐个地物进行人工勾绘,工作量较大,效率较低;二维矢量与三维模型相结合的逻辑单体化方法使用较为灵活,工作量相对较小,但现有平台所实现的效果和兼容性有待提升,对比总结见表1。
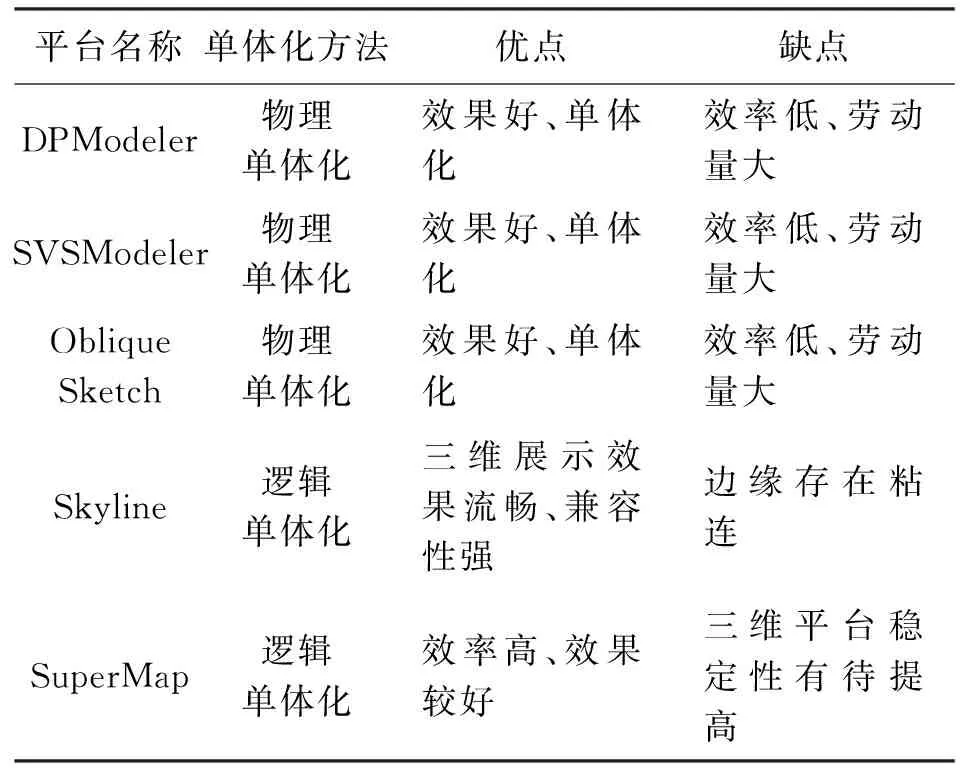
表1 单体化系统对比
5 结 语
在复杂山地城市实施倾斜摄影可通过对飞行方案的优化,针对不同的建模目标采用与之相适应的相机系统及飞行策略进行数据采集,可大幅提升实景三维模型效果;采用倾斜与近景摄影测量联合建模的方式,对模型侧面纹理效果有很大提升,但地面采集工作量大,适用于小区域、古建筑或地标性建筑;实景三维模型单体化方面,对现有单体化方法和平台进行了介绍及对比分析,为后期山地城市开展倾斜摄影提供了一定的技术参考。
[1] 田野,向宇,高峰,等. 利用Pictometry倾斜摄影技术进行全自动快速三维实景城市生产——以常州市三维实景城市生产为例[J].测绘通报,2013(2):59-62.
[2] 王伟,黄雯雯,镇娇.Pictometry倾斜摄影技术及其在三维城市建模中的应用[J].测绘与空间地理信息,2011,34(3):181-183.
[3] 靳宏斌,朱连伟,李伟伟.新固定翼无人机起降方式[C]∥2014(第五届)中国无人机大会论文集.北京:中国航空学会,2014.
[4] 杨建华,于小宁,汤鹏.四旋翼飞行器控制系统硬件电路设计[J].电子产品世界,2015,22(12):41-43.
[5] 段洪伟,赵长辉,王琦. 新型垂直起降无人机的发展[C]∥2014(第五届)中国无人机大会论文集.北京:中国航空学会,2014.
[6] 朱庆,徐冠宇,杜志强,等.倾斜摄影测量技术综述[EB/OL].[2014-04-16].http: ∥www.paper.edu.cn.
[7] 吴波涛,张煜,李凌霄,等.基于多旋翼单镜头无人机的三维建模技术[J] 长江学院院报,2016,33(11): 99-103, 115.
[8] 彭瑶玲. 融真山、真水之美 塑山城、江城风采——重庆山水园林城市规划思考[J].规划师,2004,20(9):26-29.
[9] 张骥,高钊,陈容.基于Leica RCD 30倾斜航摄仪和Smart三维技术快速进行城市三维实景生产[J].测绘技术装备,2014,16(3):61-64.
[10] 赵丽媛.倾斜模型建筑单体化表达与操作——单体化房屋为例[J].科技展望,2016(1):31.
[11] 邓琴,吕开云.基于DPModeler的倾斜影像三维重建[J].江西测绘,2015(1):19-20,26.
Researchon3DFineReconstructionandModelSinglingofMountainousCityCombinedwithObliquePhotographyandCloseRangePhotography
LIAN Rong,DING Yi,LUO Ding,WEI Wenjie,LI Penglong,LIN Xi
(Chongqing Geomatics Centre, Chongqing 401121, China)
The actual 3D model based on the UAV oblique photography is an effective way to perceive and express the complex mountain environment. To solve the problems in the generation of actual 3D model based on oblique photography for mountainous cities, a multi-scale image acquisition strategy suitable for mountainous region and a method of fusion modeling with close range photogrammetry is proposed in this paper. Experiments show that this method realizes the goal of precise modeling of the actual 3D model of oblique photography in mountainous cities. And then, the methods of actual 3D model’s singling are introduced and compared. This paper provides some technical references for developing oblique photography in mountainous cities in the future.
mountainous cities; vertical take-off and landing UAV; oblique photography
连蓉,丁忆,罗鼎,等.倾斜摄影与近景摄影相结合的山地城市实景三维精细化重建与单体化研究[J].测绘通报,2017(11):128-132.
10.13474/j.cnki.11-2246.2017.0362.
P23
A
0494-0911(2017)11-0128-05
2017-08-07
社会事业与民生保障科技创新专项(cstc2017shmsA1380)
连 蓉(1988—),女,助理工程师,从事无人机低空遥感及实景三维等相关研究工作。E-mail: Lianrong@dl023.net
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
北京航空航天大学学报(2021年9期)2021-11-02
科学与生活(2021年19期)2021-10-30
国画家(2021年4期)2021-10-13
现代企业(2021年2期)2021-07-20
青年文学家(2021年1期)2021-03-24
军民两用技术与产品(2021年9期)2021-03-09
华人时刊(2021年23期)2021-03-08
电子制作(2019年9期)2019-05-30
北京航空航天大学学报(2016年8期)2016-11-16
