轻量化玉米垄作免耕播种机设计与试验
2017-12-04 09:16刘艳芬李宝筏
农业机械学报 2017年11期
刘艳芬 林 静 李宝筏
(1.沈阳农业大学工程学院, 沈阳 110866; 2.青岛农业大学机电工程学院, 青岛 266109)
轻量化玉米垄作免耕播种机设计与试验
刘艳芬1,2林 静1李宝筏1
(1.沈阳农业大学工程学院, 沈阳 110866; 2.青岛农业大学机电工程学院, 青岛 266109)
针对目前东北地区的免耕播种机主要依靠自重增加下压力来保证开沟深度的问题,设计了2BQM-2型轻量化玉米垄作免耕播种机,重量为一般免耕播种机的一半,可减轻对土壤的压实。轻量化垄作免耕播种机采用悬挂方式与拖拉机联结成作业机组,利用拖拉机液压系统的位置调节法来控制破茬深度。为了验证作业机组的工作性能,田间试验以播种机速度、播种深度、秸秆覆盖量为试验因素,以免耕播种机的工作阻力和粒距合格率为试验指标,进行三因素五水平二次回归正交试验。试验结果得到的最佳工况组合为:播种机速度为1.21 m/s,播种深度为4.96 cm,秸秆覆盖量为0.73 kg/m2时,播种机工作阻力为3.62 kN,粒距合格率为93.63%。经过对免耕播种机优化设计有效减轻了免耕播种机的重量,减少了机器的制造成本和工作时对土壤的压实,降低了能耗。经田间测量镇压轮压实土壤的深度平均为10 mm,相对现有的垄台被压平的机具,工作效果良好。
免耕播种机; 玉米; 轻量化; 悬挂机构
引言
保护性耕作是指减少田间作业工序,减轻土壤风蚀、水蚀,改善耕层土壤结构,提高农作物产量的一项先进的农业耕作技术。免耕播种作为保护性耕作技术的一项重要技术,是目前东北玉米垄作区主要推行的种植模式,在地表有作物残茬的未耕地上进行播种作业,田间工况复杂,对免耕播种机的工作性能要求较高。
国内外专家学者对免耕播种机进行了大量的研究工作[1-15],这些都是对免耕播种机的关键部件进行设计研究。针对轻量化播种机及其下压力的研究,国外有的研究指出:滚动圆盘式破茬犁刀要切开残茬与土壤,每行单体需要2 224 N的下压力[16]。
我国东北玉米垄作区实行免耕播种的土壤坚实度较大,而且玉米残茬秸秆粗壮,给免耕播种机的入土性能带来困难,现在使用的免耕播种机大多通过增大重量来增加破茬下压力,两行机达1~1.5 t。而播种机自身重力过大,造成播种后垄台被压平,垄形被严重破坏失去垄作优势,加剧对土壤的压实而犁底层加厚上移,作业时能耗增大等问题。在不加大整机重量的前提下,如何使破茬开沟播种装置有足够的下压力来保证破茬盘入土深度和播深稳定性是当前免耕播种机亟待解决的问题。本文设计一种轻型玉米免耕播种机,集破茬清垄、侧深施肥、精量播种、镇压覆土功能于一体,采用悬挂式与拖拉机联结成作业机组,借助拖拉机的液压系统位置调节法对播种机的破茬装置施加下压力,保证播种机的破茬深度;利用免耕播种机单体的仿形四连杆机构来控制播种深度。
1 整机结构与技术参数
1.1 总体结构
2BQM-2型玉米免耕播种机三点悬挂于拖拉机后方,主要由上下悬挂点、机架、破茬盘、清垄轮、施肥开沟器、播种仿形机构、播种开沟器、V型覆土轮、排肥地轮、排种地轮、水平圆盘排种器、种子箱、外槽轮排肥器、肥料箱等组成,如图1所示。

图1 2BQM-2型玉米免耕播种机结构示意图Fig.1 General structure diagram of 2BQM-2 maize no-tillage planter1.上悬挂点 2.下悬挂点 3.机架 4.破茬盘 5.清垄轮 6.施肥开沟器 7.播种仿形机构 8.播种开沟器 9.V型覆土轮 10.排肥地轮 11.排种地轮 12.水平圆盘排种器 13.种子箱 14.外槽轮排肥器 15.肥料箱
破茬盘、清垄轮组成的切拨防堵装置和施肥开沟器左右对称安装在机架前梁上;播种仿形机构、播种开沟器、种子箱、V型覆土轮、排种地轮等组成的播种单体左右对称安装在机架的后梁上。为了防止肥料烧苗,采用侧深施肥,因此安装时切拨防堵装置轴线与播种开沟器前后对正,而施肥开沟器轴线要与两者左右错开。外槽轮排肥器、肥料箱安装在支架的左右两侧横梁上,驱动外槽轮排肥器的排肥地轮安装在后梁上,位于两个播种单体之间。整机结构紧凑,功能齐全,可一次完成破茬清垄、侧深施肥、精量播种、镇压覆土的功能。两行播种机的播种行距、破茬盘破茬切入土壤深度、侧深施肥侧面距离和深度、播种开沟器开沟深度、播种粒距、施肥量均设置可调。整机采用地轮和链传动进行动力传动。
1.2 主要技术参数
2BQM-2型玉米免耕播种机主要技术参数如表1所示。
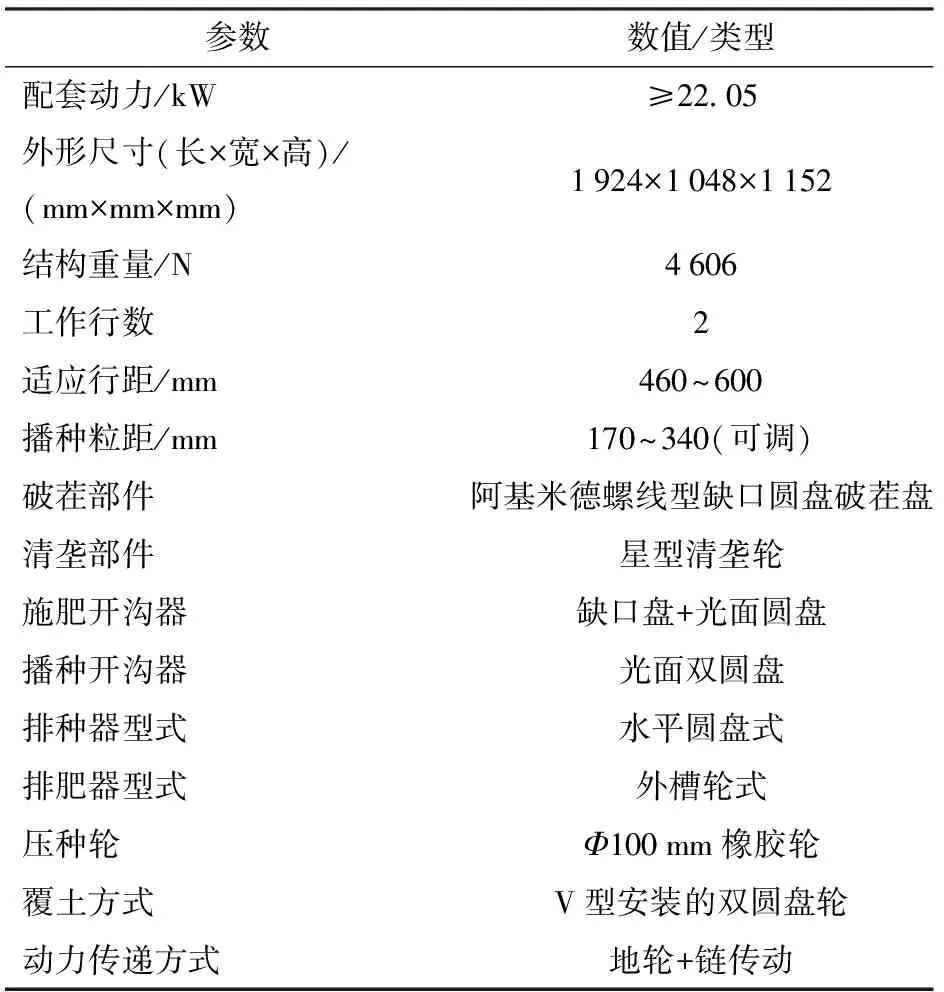
表1 2BQM-2型免耕播种机主要技术参数Tab.1 Main parameters of 2BQM-2 maizeno-tillage planter
2 关键部件设计
2.1 切拨防堵装置
当破茬犁刀切割玉米根茬时,玉米根茬长在土壤中并未腐烂不会发生移动,属于有支撑切割;当破茬犁刀切断秸秆时属于无支撑切割,如图2所示。

图2 破茬犁刀切断秸秆示意图Fig.2 Schematic diagram of stubble-cutting coulter
破茬犁刀切断玉米根茬和秸秆受力公式为
(1)
式中F1——秸秆受到土壤的摩擦力,N
F2——秸秆受到破茬犁刀的摩擦力,N
N1——秸秆受到地面的支撑力,N
N2——秸秆受到破茬犁刀的压力,N
φ——破茬犁刀对秸秆压力与铅垂线夹角,(°)
秸秆不被破茬犁刀推开,需满足
F1+F2cosφ≥N2sinφ
(2)
玉米秸秆与地面的摩擦角用β1表示,秸秆与破茬犁刀的摩擦角用β2表示,则有
(3)
将式(3)代入式(1)、(2),可得
β1+β2≥φ
(4)
(5)
式中h0——破茬犁刀破茬深度,mm
r——秸秆半径,mm
R——破茬犁刀半径,mm
将式(5)代入式(4),可得
(6)
根据田间试验测得的数据,东北玉米垄作区玉米根上节深度为60~90 mm(平均为82 mm),秸秆直径为12~25 mm,计算取25 mm;破茬深度h0取100 mm;秸秆与土壤摩擦角在30.84°~31.44°之间[17],计算取31°;秸秆与材料为65Mn的破茬犁刀的摩擦角平均值为23°~33°[18],计算取33°。将参数代入式(6),可得破茬犁刀半径R≥210 mm。
参考林静等[19]设计的11齿圆盘破茬盘的直径,本设计采用9齿阿基米德螺线型破茬犁刀,最大极径Rmax为215 mm,起始半径R0为175 mm。
为了防止秸秆出现壅堵问题,采用星型清垄轮[20]与破茬犁刀相配合完成切拨清垄功能。
2.2 免耕播种机单体
2BQM-2型玉米免耕播种机的播种单体主要是由种箱、水平圆盘排种器、地轮、仿形机构、播种开沟器、传动链轮、压种轮、覆土装置、播深调节机构等组成,如图3所示。
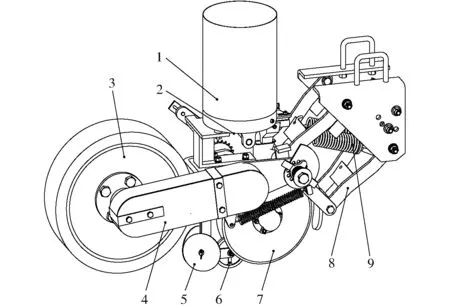
图3 播种机单体结构简图Fig.3 Structural sketch of planter unit1.种箱 2.水平圆盘排种器 3.地轮 4.地轮传动链轮盒 5.覆土器 6.压种轮 7.开沟器 8.仿形机构 9.仿形弹簧
2.2.1仿形机构
免耕播种深度稳定是播种机工作性能的重要评价指标。播种深浅不一致会影响出苗率,影响作物产量,因此保证播种开沟深度的稳定性至关重要。2BQM-2型玉米免耕播种机采用单体仿形,悬挂板、仿形上连杆、仿形横梁和仿形下连杆组成四杆仿形机构,限位板固定在悬挂板上,限制仿形上连杆的转动角度[21]。
四连杆仿形机构在铅垂面上的受力分析如图4所示。免耕播种机田间工作时,压种轮受力(Px、Pz)和覆土器受力(Qx、Qz)都比较小,在受力分析时简化将两者合并到开沟器的受力上,即对Rx、Rz分别乘以系数λ,经实测λ取1.1~1.2较接近真实受力[22]。
播种机稳定工作时,其受力平衡条件为
FAx+FBx+Tcosβ-λRx-Sx=0
(7)
FAz+FBz+λRz+Sz-G=0
(8)
取∑MA=0,得
FBzhcosγ+FBxhsinγ+λRz(lcosα-l2)+
λRx(lsinα+l3)+Sz(lcosα+l4)+
Sx(lsinα+l5)-G(lcosα+l1)=0
(9)
式中FAx、FAz——上拉杆受力水平、竖直分力,N
FBx、FBz——下拉杆受力水平、竖直分力,N
α——BC杆与水平方向的夹角,(°)
β——仿形弹簧与水平方向的夹角,(°)
γ——CD杆与垂直方向的夹角,(°)
T——弹簧受力,N
Rx、Rz——开沟器受力的水平、竖直分力,N
Px、Pz——压种轮受力的水平、竖直分力,N
Qx、Qz——覆土器受力水平、竖直分力,N
Sx、Sz——仿形轮受力的水平、竖直分力,N
G——播种单体重量,N
l1——单体质心到D点的水平距离,mm
l2——开沟器质心到D点的水平距离,mm
l3——开沟器质心到D点的垂直距离,mm
l4——地轮质心到D点的水平距离,mm
l5——地轮质心到D点的垂直距离,mm
l——平行四连杆长杆的长度,mm
h——平行四连杆短杆的长度,mm

图4 播种机单体受力示意图Fig.4 Sketch of forces on planter unit
以播种机稳定工作为前提条件,根据实际需要的仿形量来确定仿形四连杆的尺寸。免耕播种机仿形机构的仿形量是根据播种作业时田间地表状况和当地的地形地貌来确定。通常情况,上、下仿形量各设置为80~100 mm[23]。平行四杆仿形机构的结构如图5所示。
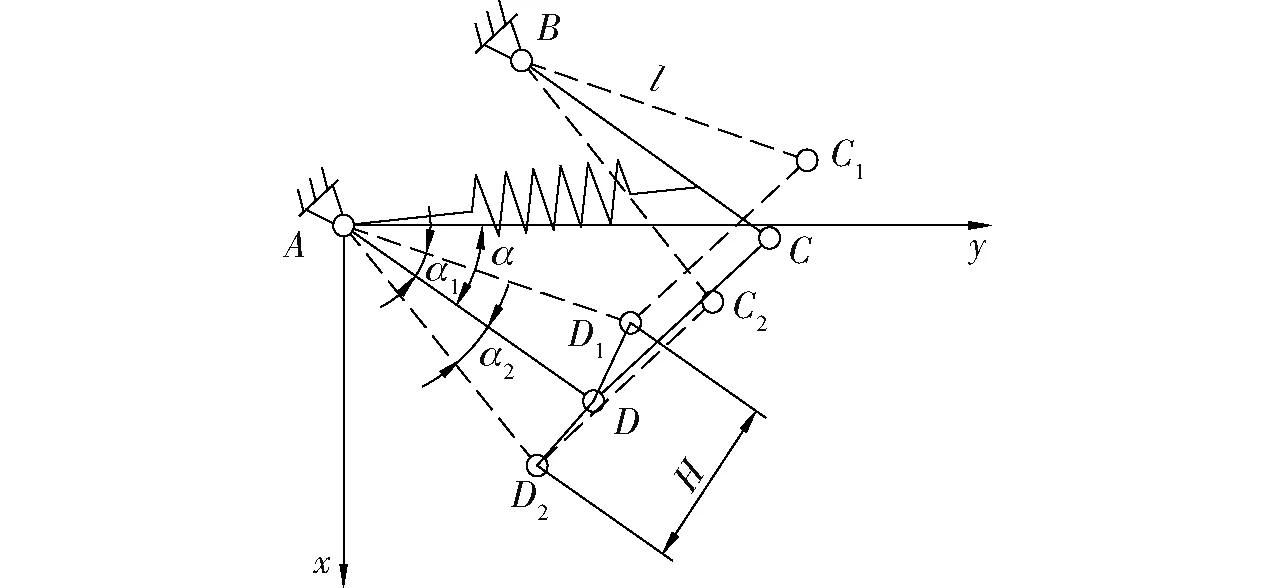
图5 平行四杆仿形机构结构示意图Fig.5 Structure diagram of parallel four linkage mechanism
由图5可知,仿形机构的上下总仿形量H为

(10)
由式(10)可知,在仿形量相同的情况下,平行四杆仿形机构的拉杆长度l越大,牵引角α的变化范围越小;l越小,牵引角α的变化范围越大。从播种机田间工作情况考虑,牵引角变化范围越小,播种机工作稳定性越好,即拉杆长度l增大对播种机稳定性有利。但拉杆长度l过大,势必会使得播种机重心后移,对悬挂式播种机组的纵向稳定性不利。
设计上仿形角α1为10°,工作角α为21°,下仿形角α2为10°,l为250 mm,两连杆之间距离lAB=110 mm,代入式(10),计算得H=87 mm,符合仿形量为80~100 mm的要求,证明仿形结构达到了设计要求。
2.2.2传动系统播种机构由地轮转动提供动力,经两级链传动、一级锥齿轮传动,到达水平圆盘排种器进行播种,传动比

(11)
式中D——播种地轮直径,mm
δ——播种作业时地轮滑移率,%
Lb——播种要求的种子粒距,mm
Z——水平圆盘排种器排种盘型孔数
本设计播种粒距Lb取270 mm,地轮滑移率δ= 8%,地轮直径D为450 mm,水平圆盘排种器的排种盘充种型孔数量为18[24],将以上参数代入式(11),可得传动比i=0.32。根据总传动比,将两级链轮传动的链齿数分别确定为Z11=15,Z12=17,Z21=23,Z22=18;锥齿轮传动中,Z31=7,Z32=25。
2.2.3双圆盘开沟器
根据地轮结构尺寸参数(图6),双圆盘开沟器直径D0取304 mm。双圆盘之间的夹角θ越大,开沟阻力大且容易破坏垄形;但过小又难以容纳导种管,因此θ取12°,φ为15°[25],则双圆盘开沟器的开沟宽度为

(12)
将参数取值代入式(12),得开沟宽度b≈24 mm。
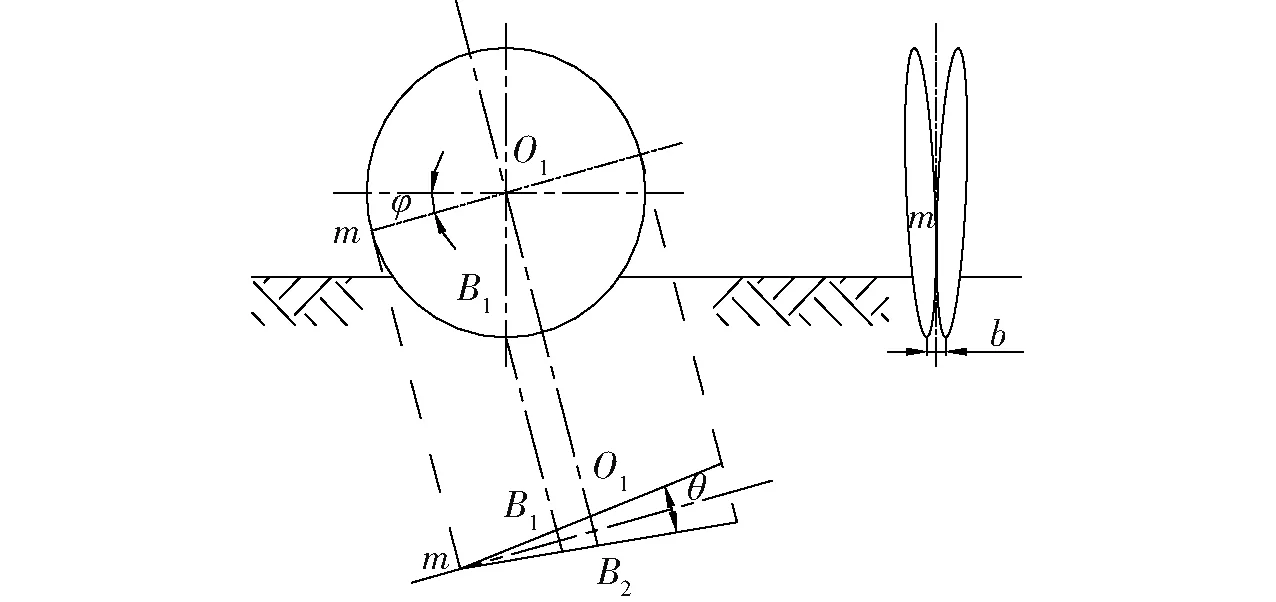
图6 双圆盘开沟器的开沟宽度示意图Fig.6 Diagram of furrow width of double disc opener
2.3 施肥开沟装置
为了满足玉米在不同生长期内对肥料的需求,2BQM-2型玉米免耕播种机同时施加口肥和底肥[26]。口肥排肥管布置在破茬清垄装置上,口肥施加在破茬盘开的沟中。由于破茬深度比播种深度大20~30 mm,口肥不会烧种,可以给玉米发芽期和幼苗期提供营养。免耕保护性耕作要求作业机具进地次数尽可能少,因此底肥的施肥量要满足玉米整个生长期对肥料的需求,采用侧深施肥可在不烧种的前提下满足这一要求。本设计采用在种子侧面50~100 mm、下方深30~50 mm处施肥。
垄台的侧深方向会有玉米气生根和次生根的根茬,施肥开沟器也要求有一定的破茬切断能力。缺口盘更容易入土,所受阻力矩明显小于水平圆盘,设计中施肥开沟器采用半圆形缺口盘和圆盘的双圆盘组合式开沟器,半圆形缺口盘安装于机器内侧,平圆盘与铅垂面呈7°夹角安装于外侧,能够保证一定的开沟深度和宽度,且利于保持垄形,装置如图7所示。

图7 施肥开沟装置结构示意图Fig.7 Structure diagram of fertilizing ditching device1.机架固定板 2.侧向调节板 3.仿形弹簧 4.限位螺栓 5.圆盘开沟器 6.缺口盘开沟器 7.开沟盘安装支架 8.竖杆
竖杆上加工有一列竖直排列的通孔,根据施肥深度选择适当的孔通过铰制螺栓与机架固定板连接,机架固定板通过U型螺栓固定在播种机前梁上。肥料与种子的侧向距离可通过改变机架固定板在前梁上的位置来调节。
免耕播种机作业时,圆盘旋转,能够切断玉米副根茎和田间杂草,防止挂草壅土。由于田间情况比较复杂,要求施肥开沟装置有较好的仿形能力,因而该装置设有仿形弹簧。弹簧一端固定在竖杆上;另一端固定在开沟盘安装支架上。安装时弹簧有一定预紧力将开沟器拉紧,防止开沟器一接触土壤就被弹起,只有土壤给开沟器的反作用力大于弹簧预紧力,也就是遇到硬物时,弹簧才会被继续拉长,开沟器绕铰接点转动,躲过硬物后,地面给开沟器的反作用力减小,小于弹簧预紧力时开沟器恢复原位。使用铰制螺栓做限位装置,保证开沟器的开沟深度始终在要求范围内。
3 工作深度联合调节法设计与分析
免耕播种机工作中需要满足的工作深度主要包括破茬深度和播种深度。前者通过拖拉机液压系统来施加下压力达到要求;后者由带弹簧的仿形机构控制下压力来实现。
3.1 切拨防堵装置工作深度调节
拖拉机液压系统按播深调节方式分类,主要有高度调节、阻力调节、位置调节和综合调节。前期大量研究表明,选用位置调节方式来给切拨防堵装置施加下压力适合免耕播种田间工况要求。

图8 机组位置调节工作原理图Fig.8 Working principle diagram of position adjustment1.油缸 2.活塞 3.油泵 4.主控制阀 5.主控制阀弹簧 6.回油阀 7.单向阀 8.位调节杠杆 9.位调节手柄 10.杠杆弹簧 11.滚轮 12.凸轮 13.外提升臂 14. 2BQM-2型玉米免耕播种机
采用位置调节时,是通过改变拖拉机液压油缸的行程,使得免耕播种机保持预设的播深[27]。试验选用东方红-30型拖拉机(额定提升质量870 kg)与2BQM-2型免耕播种机配套联接。工作机组采用位置调节法工作原理,如图8所示。机组田间作业时,调整播深至预设值。若播深变大,则提升臂有绕位调节凸轮支点逆时针方向的力矩。杠杆弹簧拉紧位调节杠杆,使滚轮始终与位调节凸轮紧密接触。此时,提升臂带动位调节凸轮转动,使得位调节杠杆以滚轮和位调节凸轮的接触点为支点逆时针转动,这样位调节杠杆就会离开主控制阀,主控制阀在主控制阀弹簧的推力作用下向左伸出,主控制阀通往回油阀的油孔A打开,进入的液压油将回油阀向右推进;通向油缸的油孔C关闭。此时,油泵输送过来的液压油打开单向阀进入油缸,推动活塞左移,带动提升臂以位调节凸轮支点为支点顺时针转动,外提升臂提起。免耕播种机小幅提升至设定的深度位置时“中立”,停留在此位置上继续作业。同理,若出现播深变浅,拖拉机液压系统亦可以将播深调整至中立位置,以保证播深稳定性。
田间试验在免耕播种机前进速度为5 km/h时测得的数据,经Matlab编程得到播深与牵引阻力互相关函数曲线,如图9所示。由图9可见牵引阻力滞后播深变化。经分析液压系统反馈时间Δt1~Δt8为0.12~0.30 s,可以实现实时调节。

图9 播深与牵引阻力互相关函数曲线Fig.9 Cross-correlation curve of depth and tractive resistance
3.2 播种深度稳定性的实现
免耕播种机田间作业时,仿形轮和播种开沟器均受到土壤的摩擦阻力,分别为
(13)
式中μ——仿形轮与土壤的摩擦因数
f——播种开沟器与土壤的摩擦因数
联立式(7)、(8)、(13),得

(14)
免耕播种机单体田间作业时,要保证开沟深度稳定,则仿形轮必须有一定的下压力,即Szgt;0,可得播种单体系统重量范围为
Ggt;λRz+λfRztanα-Tsinβ-Tcosβtanα
(15)
可见,仿形机构安装弹簧可使免耕播种单体在保持播深稳定前提下减小ΔG,有利于实现播种机的轻量化。ΔG为
ΔG=Tsinβ+Tcosβtanα
(16)
对于仿形弹簧,图10表示了其3种工作状态,其中图10a表示的是播深稳定时,此时弹簧受力为T0。当遇到障碍物时,地轮被抬高,仿形机构状态如图10b所示,此时随着仿形角的变化,γ随之变化,弹簧被拉长产生更大的变形量,则弹簧拉力增大,必然给四连杆向下的拉力,使得地轮贴近地面,起到很好的仿形效果。图10c表示下仿形时,弹簧长度缩短,对地轮的下压力减小。根据设计要求,当播种地轮被抬高50 mm时,仿形弹簧受到650 N的力,此时弹簧的变形量经计算为31.26 mm,则由库克定律可得仿形弹簧的刚度k=20.8 N/mm。
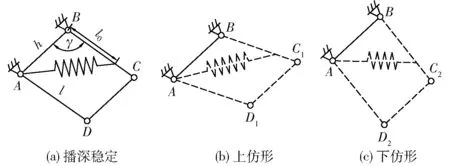
图10 仿形弹簧工作状态Fig.10 Working conditions of profile spring
4 田间试验
4.1 试验条件
机具田间试验在沈阳农业大学科技试验田进行,试验所用地块长326 m,宽67 m,玉米根茬秸秆免耕覆盖。
试验田土壤类型为棕壤土。用SC900型数字式土壤坚实度测量仪(美国芝加哥Spectrum技术公司,测深范围0~45 cm,测压范围0~7 MPa)测量土壤坚实度,地表土壤紧实度为121 kPa,5 cm深处为347 kPa,10 cm为482 kPa,15 cm为957 kPa。用SM-2型高精度土壤水分测量仪(澳作生态仪器有限公司,精度±5%)测定土壤含水率,0~10 cm土壤含水率为12.3%,10~20 cm为14.8%。用角型玻璃温度计(河北华宇仪表厂,测量范围-20~50℃)测量土壤温度,5 cm深土壤温度为15.4℃,10 cm深为12.5℃,15 cm深为11.1℃。配套动力为东方红-30型拖拉机。
4.2 试验设计与试验方法
根据前期单因素试验的结果,播种机速度、播种深度和秸秆覆盖量是影响播种机工作阻力和种子粒距合格率的主要因素。为获得免耕播种机的最佳工况,以播种机速度、播种深度、秸秆覆盖量为试验因素,以播种机工作阻力和种子粒距合格率为试验指标,进行三因素五水平的二次回归正交组合试验[28]。试验中为达到秸秆覆盖量水平值,进行人工排布秸秆。试验因素编码见表2。

表2 因素编码Tab.2 Coding for factors
根据GB/T 6973—2005《单粒(精密)播种机试验方法》的要求,设Lb为理论粒距,Ls为播种后实测粒距,当0.5Lblt;Ls≤1.5Lb时,为合格粒距。根据东北垄作区的玉米播种经验,本试验Lb=270 mm。粒距为播种后人工扒开播种带进行测量。
免耕播种机播种深度和工作阻力分别由相应的传感器测得。试验前,先分别对KTRC-100L型直线位移传感器(浙江省台州市椒江西域电子厂)和应变式负荷传感器QLLY型拉压力传感器(蚌埠启力传感系统工程有限公司,量程为0 ~ 700 kg)进行标定,得到位移与电压的关系式、拉压力与电压的关系式。试验时,直线位移传感器采集的电压信号直接传送至NI USB-6008型多功能数据采集卡(美国国家仪器有限公司,松下LC-R123R4PG型蓄电池供电);拉压力传感器采集到的电压信号经BSQ-2型变送器(蚌埠称重传感系统工程有限公司)传送至NI USB-6008型多功能数据采集卡,再传送到LabVIEW Signal-Express 2011软件。后期数据处理时,将电压信号由LabVIEW Signal-Express 2011软件导入Excel软件,用Excel软件对传感器标定式进行计算,得到播种深度和工作阻力数据。测试系统总体结构如图11所示,整机田间试验如图12所示。

图11 测试系统结构图Fig.11 Test system structure diagram

图12 整机田间试验Fig.12 Field test of planter1.蓄电池 2.数据采集卡 3.便携式计算机 4.直线位移传感器 5.变送器 6.拉压力传感器
4.3 试验结果与分析
根据三因素五水平二次回归正交试验设计,安排17次试验,试验方案与结果如表3所示,其中X1、X2、X3分别为x1、x2、x3的编码值。

表3 试验方案与结果Tab.3 Experimental project and results
根据试验结果,剔除其中的不显著项,得到工作阻力的因素编码回归方程为

(17)
式中Y1——工作阻力,kN
根据回归方程中X1、X2、X3系数,得3个试验因素对播种机工作阻力影响从大到小依次是秸秆覆盖量、播种深度、播种机速度。
工作阻力的因素实际值回归方程为

(18)
为检验工作阻力回归方程的显著性,对其回归方程进行检验,显著性检验结果如表4所示。
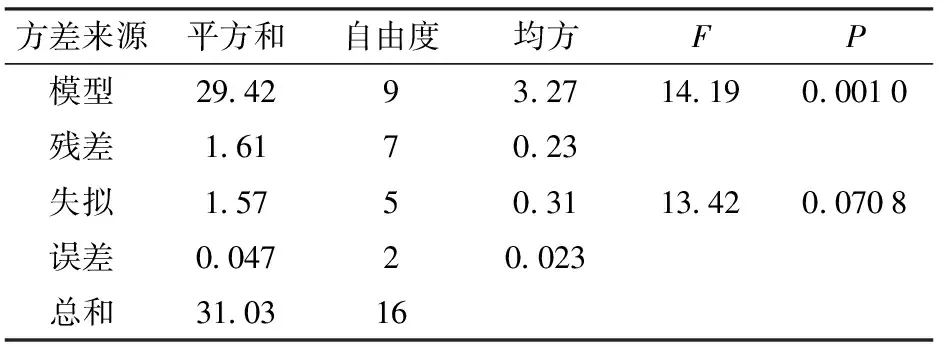
表4 工作阻力方差分析Tab.4 Variance analysis of tillage resistance
模型的Plt;0.01,说明此模型极显著;失拟项P=0.070 8gt;0.05,说明F检验结果不显著,表明试验指标回归方程与试验数据的拟合程度良好。
同理得粒距合格率的因素编码回归方程为
Y2=94.25-1.78X1+0.053X2+1.33X3+
(19)
式中Y2——粒距合格率,%
由回归方程中X1、X2、X3系数,可知3个试验因素对粒距合格率影响从大到小依次是播种机速度、秸秆覆盖量、播种深度。
粒距合格率的因素实际值回归方程为
Y2=-68.67+312.87x1+14.53x2+10.89x3-
(20)
为检验粒距合格率回归方程的显著性,对回归方程进行检验,显著性检验结果如表5所示。
模型的Plt;0.01,说明此模型极显著;失拟项P=0.062 8gt;0.05,说明F检验结果不显著,表明试验指标回归方程与试验数据的拟合程度良好。
应用Design-Expert 8.0.6软件,将一个因素固定在零水平,获得另外两个因素对工作阻力和粒距合格率的影响。利用软件的响应面图,可以形象地得到两个因素对试验指标的影响。因素对工作阻力的影响如图13所示,对粒距合格率的影响如图14所示。
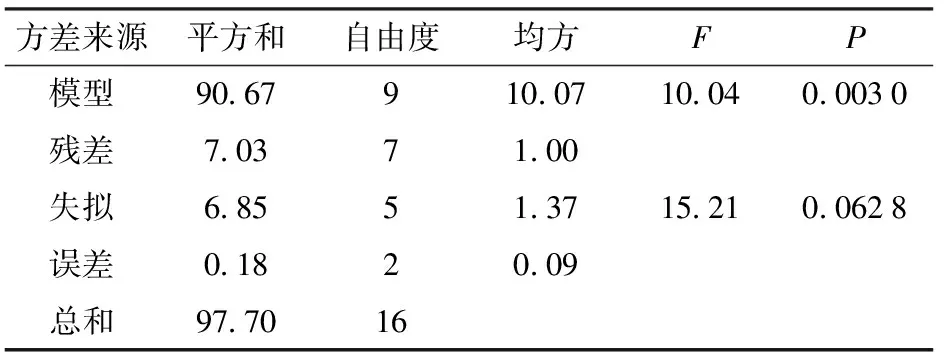
表5 粒距合格率方差分析Tab.5 Variance analysis of seed spacing qualified rate
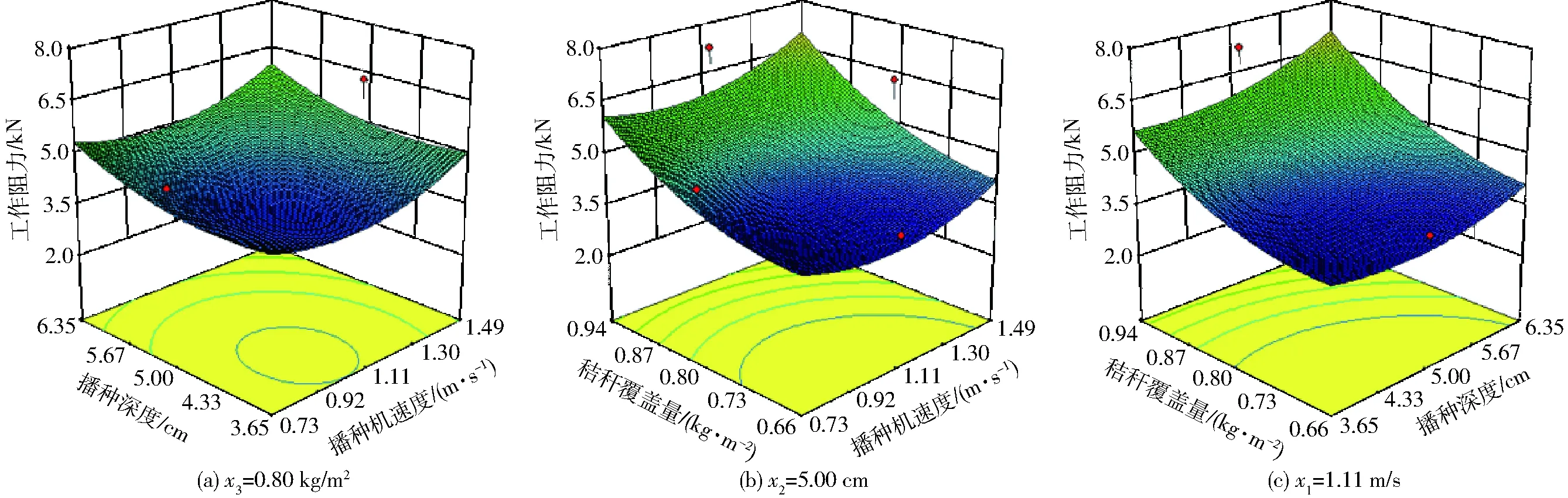
图13 试验因素对工作阻力影响的响应曲面Fig.13 Response surfaces of impact of test factors on tillage resistance

图14 试验因素对粒距合格率影响的响应曲面Fig.14 Response surfaces of impact of test factors on seed spacing qualified rate
工作阻力回归方程的响应面显示,秸秆覆盖量对指标的影响最显著,为主要因素。工作阻力随着秸秆覆盖量的增加而增大,在秸秆覆盖量偏低、排种深度和播种机速度接近零水平时,工作阻力较小。
粒距合格率回归方程响应面显示,播种机速度对该指标的影响最显著,为主要因素;秸秆覆盖量和播种深度为次要因素。粒距合格率随着播种机速度的增加先升高后降低,在播种速度较高、秸秆覆盖量和播种深度中等时,粒距合格率较高。
根据建立的回归数学模型,可以获得各因素的最优参数组合,实现播种机的最佳作业效果。利用Design-Expert 8.0.6软件的优化求解模块,以最小工作阻力和最大粒距合格率为评价指标,建立数学模型:
目标函数为
(21)
约束条件为
(22)
求得满足约束条件的最小工作阻力和最大粒距合格率的最优参数组合为:播种机速度为1.21 m/s,播种深度4.96 cm,秸秆覆盖量为0.73 kg/m2,此时工作阻力为3.62 kN,粒距合格率93.63%。试验中秸秆覆盖量的5个水平,免耕播种机均可保证作业效果。
根据最优参数组合,在同一地点以同样的试验方法进行验证试验。结果显示,当前进速度1.25 m/s,播种深度4.63 cm,秸秆覆盖量0.73 kg/m2时,播种机工作阻力为3.54 kN,粒距合格率91.25%。同样的速度和播深下,将地表秸秆覆盖量增大到1.0 kg/m2,测得播种机工作阻力为6.73 kN,粒距合格率85.52%,试验指标满足国家行业标准要求[29],证明优化结果是合理可靠的。
由图12整机田间试验可见,由于利用拖拉机液压系统位置调节方式控制播种深度,可以得出镇压轮压实土壤深度经实际田间测量平均为10 mm,相对依靠自重增加下压力的免耕播种机工作效果良好。目前农业生产使用的机型依靠重量增加下压力达到开沟深度的免耕播种机,垄台被压平,失去垄作优势。免耕播种机作业后土壤压实状况如图15所示,为免耕播种机作业后垄形断面图,作业时清垄器入土深度平均为20 mm,破茬犁刀入土深度平均为75 mm,播种开沟器开沟深度平均为46 mm,测深施肥开沟器入土深度平均为76 mm。在垄上播种后由镇压轮压实土壤。镇压轮自重再加上弹簧下压力作用下经试验测得平均为411 N,镇压轮轮胎宽度为70 mm,经计算镇压轮对土壤的压强为41.94 kPa,达到了辽宁省播种重镇压39.2 kPa的农业技术要求,且小于地表原始的土壤坚实度121 kPa。

图15 播种后垄形断面示意图Fig.15 Schematic diagram of ridge shape after plantingA.清垄器动土范围 B.破茬犁刀工作深度 C.播种开沟 D.侧深施肥开沟 1.底肥 2.口肥 3.玉米种子
整机田间性能试验测试结果如表6所示。

表6 整机田间性能试验测试结果Tab.6 Test results of 2BQM-2 no-tillage planter
当机器前进速度为1.25 m/s时,由表6所示,2BQM-2型免耕播种机播深46.30 mm,标准差2.83,变异系数6.11%,其免耕播种机播种深度稳定。
切拨防堵装置破茬深度平均为76.10 mm,标准差2.52,变异系数3.30%,说明免耕播种机当机器前进速度为1.25 m/s时,播种深度可以实时调节,达到了免耕播种机农业技术要求。
5 结论
(1)通过对2BQM-2型玉米垄作免耕播种机优化设计,整机自重4 700 N,是东北地区目前使用的免耕播种机重量的一半。作业时保持田间垄形结构,发挥垄作优势,降低了生产成本和工作能耗。
(2)通过对免耕播种机关键部件的优化设计,利用拖拉机液压系统和仿形机构提供的下压力对工作深度实时调节,满足东北地区玉米垄作免耕播种机工作深度要求。
(3)应用三因素五水平二次回归正交组合设计,建立试验指标与试验因素的回归数学模型,通过响应面得到试验因素对试验指标的影响和交互作用关系。利用Design-Expert 8.0.6软件的优化求解模块,得到最佳工况组合为:播种机速度1.21 m/s,播种深度4.96 cm,秸秆覆盖量0.73 kg/m2,此时工作阻力为3.62 kN,粒距合格率93.63%。试验结果表明,播种深度稳定,粒距合格率符合国家行业标准。
1 SIEMENS M C, WILKINS D E, CORREA R F. Development and evaluation of a residue management wheel for hoe-type no-till drills[J]. Transactions of the ASAE, 2004, 47(2): 397-404.
2 SMITH J A, WILSON R G, BINFORD G D, et al.Tillage systems for improved emergence and yield of sugarbeets[J].Applied Engineering in Agriculture, 2002, 18(6): 667-672.
3 SIDHU H S, MANPREET-Singh, HUMPHREYS E, et al. The happy seeder enables direct drilling of wheat into rice stubble[J]. Australian Journal of Experimental Agriculture, 2007, 47(7): 844-854.
4 贾洪雷,赵佳乐,姜鑫铭,等. 行间免耕播种机防堵装置设计与试验[J]. 农业工程学报,2013,29(18):16-25.
JIA Honglei, ZHAO Jiale, JIANG Xinming, et al. Design and experiment of anti-blocking mechanism for inter-row no-tillage seeder[J]. Transactions of the CSAE, 2013, 29(18): 16-25.(in Chinese)
5 林静,刘安东,李宝筏,等. 2BG-2 型玉米垄作免耕播种机[J]. 农业机械学报,2011,42(6):43-46.
LIN Jing, LIU Andong, LI Baofa, et al. 2BG-2 type corn ridge planting no-till planter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(6): 43-46. (in Chinese)
6 赵佳乐,贾洪雷,郭明卓,等. 免耕播种机有支撑滚切式防堵装置设计与试验[J].农业工程学报,2014,30(10):18-28.
ZHAO Jiale, JIA Honglei, GUO Mingzhuo, et al. Design and experiment of supported roll-cutting anti-blocking mechanism with for no-till planter[J]. Transactions of the CSAE, 2014, 30(10): 18-28. (in Chinese)
7 卢彩云. 免耕播种机滑板压秆旋切式防堵技术与装置研究[D]. 北京:中国农业大学,2014.
LU Caiyun. Study on anti-blocking technology and device of rotary cutting with slide plate pressing straw for no-till planter[D]. Beijing: China Agricultural University, 2014. (in Chinese)
8 陈海涛,查韶辉,顿国强,等. 2BMFJ系列免耕精量播种机清秸装置优化与试验[J/OL]. 农业机械学报,2016,47(7):96-102. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160714amp;flag=1.DOI:10.6041/j.issn.1000-1298.2016.07.014.
CHEN Haitao, ZHA Shaohui, DUN Guoqiang, et al. Optimization and experiment of cleaning device of 2BMFJ type no-till precision planter[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 96-102. (in Chinese)
9 杨帆,李问盈,李洪文,等. 免耕播种机缺口圆盘刀有限元静强度分析[J]. 农业机械学报,2010,41(6):53-55.
YANG Fan, LI Wenying, LI Hongwen, et al. Finite element analysis for gap disc of no-till planter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(6): 53-55. (in Chinese)
11 张瑞. 一年两熟地区麦菩地玉米免耕播种播巧控制机构的研究[D]. 北京:中国农业大学,2016.
ZHANG Rui. Study on precision depth-control mechanism of corn no-till planter in double-cropping area[D]. Beijing: China Agricultural University, 2016. (in Chinese)
12 刘林. 免耕播种机地轮设计与试验研究[D]. 哈尔滨:东北农业大学,2015.
LIU Lin. Design and experiment of no-tillage seeder wheel[D]. Harbin: Northeast Agricultural University, 2015. (in Chinese)
13 庄健,贾洪雷,马云海,等. 具有滑刀式缺口的圆盘开沟器设计与试验[J/OL]. 农业机械学报,2013,44(增刊1):83-88. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2013s116. DOI:10.6041/j.issn.1000-1298.2013.S1.016.
ZHUANG Jian, JIA Hongle, MA Yunhai, et al. Design and experiment of sliding-knife-type disc opener[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp.1): 83-88. (in Chinese)
14 王洪锋,李金泽. 免耕播种机活块仿形轮装置:中国,ZL 201520231637.1 [P].2015-08-05.
15 白晓虎,李芳,张祖立,等.基于ADAMS的免耕播种机仿形机构弹簧参数优化[J]. 干旱地区农业研究,2014,32(6):268-272.
BAI Xiaohu, LI Fang, ZHANG Zuli, et al.Parameter optimization for the profiling mechanism spring of no-till planter based on ADAMS[J]. Agricultural Research in the Arid Areas, 2014, 32(6): 268-272. (in Chinese)
16 GRISSO R B, HOLSHOUER D, PITMAN R. Planter/drill considerations for conservation tillage systems[R]. Virginia Cooperative Extension, 2007:442-457.
17 林静,赵德芳,胡艳清,等. 基于免耕播种的玉米根茬物理机械特性分析[J]. 农机化研究,2012,34(3):162-166.
LIN Jing, ZHAO Defang, HU Yanqing, et al.Analysis on physical and mechanical characteristics of corn residue for no-till planter[J]. Journal of Agricultural Mechanization Research, 2012,34(3): 162-166. (in Chinese)
18 王庆杰,李洪文,何进,等. 螺旋刀型垄台清理装置的设计与试验[J]. 农业工程学报,2010,26(6):109-113.
WANG Qingjie, LI Hongwen, HE Jin, et al. Design and experiment on twist type ridge-clear device[J]. Transactions of the CSAE, 2010, 26(6): 109-113. (in Chinese)
19 林静,李博,李宝筏,等. 阿基米德螺线型缺口圆盘破茬刀参数优化与试验[J/OL]. 农业机械学报,2014,45(6):118-124. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140619amp;flag=1.DOI:10.6041/j.issn.1000-1298.2014.06.019.
LIN Jing, LI Bo, LI Baofa, et al.Parameter optimization and experiment on archimedes spiral type of gap cutting disc[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(6): 118-124. (in Chinese)
20 林静,钱巍,牛金亮. 玉米垄作免耕播种机新型切拨防堵装置的设计与试验[J]. 沈阳农业大学学报,2015,46(6):691-698.
LIN Jing, QIAN Wei, NIU Jinliang. Design and experiment of stubble-cutting and anti-blocking mechanism for ridge-till and no-till planter[J]. Journal of Shenyang Agricultural University, 2015, 46(6): 691-698. (in Chinese)
21 林静,刘艳芬,李宝筏.一种仿形播种装置:中国,ZL 2015 20637212.0[P].2015-12-30.
22 包文育.东北垄作免耕播种机关键部件研究与整机设计[D].沈阳: 沈阳农业大学,2009.
23 赵淑红,蒋恩臣,闫以勋,等. 小麦播种机开沟器双向平行四杆仿形机构的设计及运动仿真[J]. 农业工程学报,2013,29(14):26-32.
ZHAO Shuhong, JIANG Enchen, YAN Yixun, et al. Design and motion simulation of opener with bidirectional parallelogram linkage profiling mechanism on wheat seeder[J]. Transactions of the CSAE, 2013, 29(14): 26-32. (in Chinese)
24 刘艳芬,林静,李宝筏,等.玉米播种机水平圆盘排种器型孔设计与试验[J]. 农业工程学报,2017,33(8):37-46.
LIU Yanfen, LIN Jing, LI Baofa, et al. Design and experiment of horizontal disc seed metering device for maize seeder[J]. Transactions of the CSAE, 2017, 33(8): 37-46. (in Chinese)
25 李宝筏. 农业机械学[M]. 北京:中国农业出版社,2003.
26 林静,刘艳芬,李宝筏. 施肥开沟装置:中国,ZL 2015105139505.3[P].2015-12-16.
27 浙江农业大学等. 拖拉机构造原理与使用[M]. 北京:机械工业出版社,1981.
28 徐中儒. 回归分析与试验设计[M].北京:中国农业出版社,1998.
29 JB/T 10293—2001 单粒(精密)播种机技术条件[S].2001.
DesignandExperimentonLightweightMaizeRidgePlantingNo-tillagePlanter
LIU Yanfen1,2LIN Jing1LI Baofa1
(1.CollegeofEngineering,ShenyangAgriculturalUniversity,Shenyang110866,China2.MechanicalandElectricalEngineeringInstitute,QingdaoAgriculturalUniversity,Qingdao266109,China)
At present, no-tillage planters in Northeast China mainly depend on the weight to increase pressure to ensure the ditching depth. Aiming at this, a lightweight 2BQM-2 type maize ridge planter was designed. Its weight was half of the general no-tillage planter, so as to reduce the soil compaction. The new lightweight no-tillage planter was connected with a tractor to be a operating unit by hydraulic hitch equipment. The operating unit used the hydraulic structure of the tractor and the mechanical structure of the planter to jointly adjust the stubble breaking depth, seeding depth and depth stability. In order to verify the performance of the operation unit and get the best combination of working conditions, a quadratic orthogonal rotary composite experiment was designed with the planter speed, seeding depth and straw coverage quantity as experiment factors to evaluate tillage resistance of the planter and qualified rate of seed spacing. The optimum working conditions were as follows: the planter speed was 1.21 m/s, the sowing depth was 4.96 cm, and the straw coverage was 0.73 kg/m2, the working resistance of the seeder was 3.62 kN, and the seed-distance qualified rate was 93.63%. The validation test results showed that the test indexes met the requirements of the national industry standards. It proved that it was feasible to use the hydraulic system of tractor to exert the pressure on the stubble breaking device of the seeder. Through the optimum design, the weight of no-tillage planter was effectively reduced, the manufacturing cost of the machine and the energy consumption were reduced. By field measurements, the average soil depth of the compacted wheel was 10 mm. It had satisfactory efficiency compared with the machines which flattened ridges. It can provide scientific basis and method of evaluation and improvement of maize no-tillage planter in Northeast China.
no-tillage planter; maize; lightweight; suspension mechanism
10.6041/j.issn.1000-1298.2017.11.008
S223.2
A
1000-1298(2017)11-0060-10
2017-08-21
2017-09-17
国家自然科学基金项目(51275318)和农业部公益性行业科研专项(201503116-09)
刘艳芬(1979—),女,博士生,青岛农业大学讲师,主要从事旱作农业机械化及智能化装备研究,E-mail: liu_yanfen@163.com
林静(1967—),女,教授,博士生导师,主要从事旱作农业机械化及智能化装备研究,E-mail: synydxlj69@163.com
猜你喜欢
农业技术与装备(2021年3期)2021-12-01
今日农业(2021年1期)2021-11-26
今日农业(2020年22期)2020-12-14
农机化研究(2019年1期)2019-12-21
农民致富之友(2019年22期)2019-08-16
农民致富之友(2019年16期)2019-07-01
农机化研究(2018年8期)2018-07-10
中国农业文摘-农业工程(2016年5期)2016-04-12
中国卫生质量管理(2015年2期)2015-12-01
现代企业(2015年8期)2015-02-28