
可拆装专业模型电梯机械结构设计的研究
2017-11-30 06:15姚胜昶
中国设备工程 2017年22期
姚胜昶
(苏州信息职业技术学院,江苏 苏州 215200)
可拆装专业模型电梯机械结构设计的研究
姚胜昶
(苏州信息职业技术学院,江苏 苏州 215200)
随着新建建筑物的高度越来越高,电梯的使用也越来越普遍,对从事电梯机构设计、养护维护、销售安装等人员需求量也是越来越大.我国很多的大中专院校已经广泛开设了电梯专业,每年都为社会输送大批的电梯专业人才,现有的电梯教学模式已经无法跟上时代的发展.本文探讨一种新型三层电梯专业模型的机械结构设计,它采用可拆装式的机械结构,主要包括井道机架、导轨导向系统、拖拽系统、轿厢系统、电梯门系统、安全保障系统等,它可以仿真出电梯的所有实际功能,为了安装方便广泛采用螺栓连接方式,可以在教学过程中随意进行拆装.经过实际应用测试和教学应用测试,该电梯能达到非常好的工作状态,且可以非常方便的用于教学目的,明显提升了电梯专业的教学质量.
模型电梯;机械结构;电梯行业
随着城市当中的新建建筑越建越高,电梯的应用也是越来越普遍,对电梯专业人才的需求量也是越来越大.我国很多大中专院校已经广泛开展了电梯相关专业课程,但因为该专业的开设时间相对较短,教学过程中还存在很大的不足,学生往往可以掌握比较扎实的理论知识,但动手实践能力普遍偏差,这主要是由于目前学校采用的电梯教学模型落后或者缺失所致,学生缺乏对电梯结构的直观认识,又缺乏真正动手实习的机会.为了全面的解决这个问题,研究可拆装式的电梯模型已经成为了提升电梯专业教学质量的当务之急.由于电梯属于一种特种设备,危险因素很多,这都为用于教学的电梯模型的设计带来了非常大的挑战,因此安全设计是电梯模型设计中的关键环节.本文对电梯模型的机械结构设计进行研究,希望对设计出实用、可靠、安全的模型电梯能起到帮助作用.
该电梯模型可以用于教学需要,可以配合大中专院校的电梯专业完成相关课程的实训要求,在学生进行专业实训时,它主要可以起到下面的几个作用.
(1)通过对电梯各部分结构的观察,掌握电梯的基本组成.
(2)可以实际动手完成对电梯结构的拆装,提高学生的动手能力.
(3)学生可以亲自动手编写电梯运行程序,并实际下载到电梯中进行测试,大大提高电梯控制专业学生的动手能力.
(4)模拟各种电梯运行当中的故障,并让学生实际动手去解决,培养学生动手排除故障的能力.
(5)对电梯电气控制系统进行装配测试,培养电气专业学生的实际动手能力.
(6)对电梯整机进行调试,进一步提高学生对电梯的认识.
1 电梯模型的机械结构组成
在进行电梯模型机械结构设计时,应该参照真实电梯结构进行设计,其应该具备实际电梯的所有功能,同时应该能够适应教学需要,使用可拆装结构,便于学生观察电梯结构组成,便于他们实际动手进行拆装,同时应该保证整个教学过程的安全性,不会给学生的生命安全带来隐患,它应该具备如下几个特点.
(1)它应该能仿真出真实电梯的所有系统功能,应该包括轿厢拖拽系统、轿厢导向系统、轿厢乘坐和控制系统、电梯门开关系统、轿厢重量抵消系统和电梯安全保障系统.
(2)采用的电梯机械结构要与真实电梯所类似,具有和真实电梯相同的机械运动原理和电梯控制原理,便于学生掌握真实的电梯运动和控制原理,且电梯的运动控制参数要与真实电梯相仿,避免实践与现实脱节的情况产生.
(3)电梯模型在结构设计上应该采用便于拆装的结构设计,且在多次拆装的情况下能够保证整个电梯结构的稳定,不会出现运行过程中的晃动现象.在进行电梯结构进行设计中应该大量采用轻质结构,便于学生进行拆装,同时增加了拆装过程当中的安全性.对于模型电梯中的易损部位,应该采用便于维修、更换的设计,且应该将其设计成通用零部件,便于零部件发生问题后能够及时购买、更换.在对可拆装结构进行设计时,要将实际拆装过程当中的安全性作为第一考虑要素.
(4)要保证设计出来的电梯可以真正稳定、可靠运行,具有比较低的能耗,能便于进行结构改进,能便于对运动控制参数进行改进,具有控制程序下载功能,便于电梯控制类专业的学生实际进行上机测试.
该电梯的机械结构应该参照真实电梯进行设计.
1.1 井道机架
模型电梯井道机架主要是为了模拟真实电梯环境中的井道,它对整个电梯结构起框架作用,是整个电梯机械结构的基础,它要有足够的强度,能够对整个电梯系统起到支撑作用,不会发生运行过程中的垮塌现象,同时它应该具备有较好的刚度,使模型电梯在运行过程中可以保持稳定.我们推荐模型电梯采用三层结构,且应该用型号合适的方钢焊接而成,并在方刚上根据结构需要开孔,以备连接其他电梯结构需要.我们在此次的研究中采用的是900mmX1100mm的井道尺寸,三层架构的底层高度设计为1100mm,中层设计为800mm,顶层高度设计为1500mm,整个结构采用普通高强度螺栓进行连接,非常方便对其进行拆装和转移,且对结构零件的棱角处安排了打磨工序,避免了拆装过程中对人员造成划伤,具有较高的安全性.
1.2 电梯运行导向系统
电梯运行导向系统主要是对轿厢和配重的活动自动度进行限定,使轿厢和配种只能沿着导轨上下进行运动,使两者在井道机架中平稳运行,不会出现晃动和震动现象,同时保障轿厢和配种上下运动彼此分离,不会发生碰撞现象,还要保证轿厢与导轨接触的运动光滑性,避免磨损的发生,可以采用轮式接触导轨,来避免此类问题.模型电梯运动导向系统主要由导轨安装支架、导轨、导靴等机构组成.导轨支架应该稳定固定在井道机架上,导轨、导靴安装在导轨支架上.导轨、导靴要保证表面的光滑,各导轨衔接要平顺,还要保证整个导轨的直线度和上下垂直度,最大程度的保障电梯运行过程中的稳定性.其中导轨支架应该设计成浮动调整型,可以很方便的对安装精度进行调整,适应可拆装的需要.为了进一步减轻模型电梯的重量,我们可以在导轨、导靴结构上采用塑料材质,它具有密度小的特点,且能有效降低导轨摩擦力,还具有造价低廉的优势.
1.3 轿厢拖拽系统
轿厢拖拽系统的主要任务是为轿厢的上下运动传递所需的动力,是电梯产生运动的基础,同时又是模型电梯设计过程中的重点和难点.模型电梯的轿厢拖拽系统是由拖拽电机、牵引钢丝绳、配重、滑轮组、绳头固定装置等组成.我们选用的拖拽电机为交流异步电机,型号位YJ120,额定功率为10kW,在变频器的控制下可以实现变频调速.我们选用的拖拽用钢丝绳为电梯专用钢丝绳,可以承受的额定负载为300kg,在正常情况下可以连续使用5年不用进行更换,具有较高的安全可靠性,其型号为8X19S+FC-8mm.配重由多块方形铁块拼装而成,可以方便的进行拼装和拆散,配重的重量根据如下公式计算得出:

式中:P为配重的重量,G为轿厢的重量,Q为额定负载的大小.
滑轮组由铸铁整体铸造而成,且采用轮辐式的结构,大大减轻了重量,方便进行搬运、拆装.滑轮组两头固定在滑动轴承上,能大大减小滑轮滚动带来的摩擦.因为行星轮变速箱具有承受负载高、减速比高的特点,且在同样减速比的情况下具有较小的重量,因此我们选用行星轮变速箱作为电机和滑轮之间的传动环节,非常适合模型电梯对便于拆装的需要.为了提高模型电梯的安全性,我们采用了双抱闸结构,它给电梯装上了双保险,当一个抱闸失效时,电梯可以依靠另一个抱闸进行工作,大大降低了电梯坠落产生的可能性.
1.4 轿厢系统
轿厢由轿厢框架、轿厢底部、轿厢四壁、轿厢顶部组成.轿厢架是轿厢的整体框架,由上梁、下梁、四条立柱、加强钢条组成,它对整个轿厢起支撑作用,并在其上配有悬吊装置.在轿厢上下梁上固定有导靴,导靴和导轨紧密贴合,保证轿厢上下运动的平稳性,并限制轿厢总是沿着电梯导轨上下运动.在导靴的旁边配有安全钳,当电梯出现坠落情况时,能有效降低轿厢的滑落速度,避免造成电梯安全事故.在轿厢的顶部配备有拖拽绳吊板,主要用作固定拖拽绳之用,应保证其与整个轿厢可靠连接,并将拖拽绳连接紧固在其上.轿厢四壁是由厚度为2mm的钢板拼接而成.其中轿底是一块700mmX600mm的钢板,轿顶是一块690mmX600mm的钢板,轿厢周围是由几块钢板拼装而成(图1).
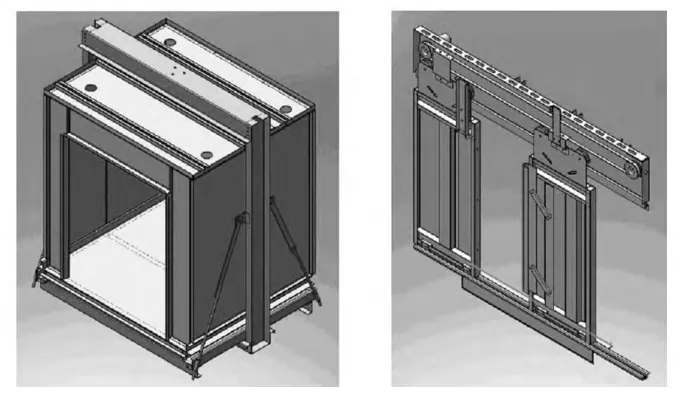
图1
1.5 电梯门系统
电梯门系统是由层门、轿厢门、门开关机械结构组成,层门和轿门由电梯门、电梯门滑动导轨、滑块、门框等结构组成.门是由厚度为2mm的钢板焊接拼装而成,为了使门具有比较高的强度,我们在门上焊上了数根加强条,且为了降低门开关过程中带来的噪音,我们在其后部贴覆了大量隔音棉.层门和轿门我们选用的尺寸为800mmX2000mm,为了增加门移动过程当中的平顺性,我们采用了导轨轮滑结构,使整个电梯门开关过程动作十分流畅.导轨采用塑料材质,有效降低了门结构的重量,导向轮也同样采用塑料材质,且在其中心配有滚动轴承.我们使用直流电机对门进行牵引,整个门牵引系统采用曲柄滑块机构,能有效避免整个电梯门系统卡死现象.我们在电梯门上还安装有光幕感知系统,能对两门之间的障碍物自动进行感知,当检测到有障碍物时整个门系统停止关闭动作,至障碍物消失时才会进行关门动作,有效避免了对人员的夹伤事故.
1.6 电梯的安全保护系统
模型电梯的主要安全保护装置有轿厢限速器、安全钳、轿厢限位保护装置、层门锁、轿顶逃生窗等.限速保护装置是当传感器检测到轿厢运动速度过快时启动安全钳,增加轿厢运动的阻力,有效降低轿厢的运动速度,防止轿厢运动过快所产生的安全事故.缓冲装置安装在轿厢的顶部和底部,主要在轿厢发生碰撞时起到缓冲作用,有液压式和弹簧式,因为液压式有体积质量小、缓冲作用大的特点,我们在设计中采用了液压式.轿厢限位开关安装在轿厢两端,当轿厢运动超过正常行程后,就会触发限位开关,强制切断拖拽电机的电源,并启动安全钳,使轿厢以最快速度停下来,避免轿厢运动超行程带来安全事故.我们还在轿厢的顶部设计有安全逃生窗,可以方便教学过程中开展电梯紧急逃生演练工作.安全系统所采用的装置都是一些标准电梯备件,非常易于购买和进行更换.
2 样机测试
在我们加工好模型电梯的各部件并装配完成后,我们就进行了对样机的可行性、可靠性、抗疲劳性测试,并进行了多次拆装实验.我们使用计算机控制方式,模拟电梯真实使用情况,让电梯自动往返上千次.实验过程中电梯平稳运行,没有出现什么特殊状况,整个拖拽系统能够非常好的完成对轿厢的拖拽,起、停过程安全、可靠、定位准确,且轿厢在运动过程中,运动十分平稳,没有出现晃动和震动.我们还对模型电梯进行十多次的拆装实验,在模型电梯进行了多次拆装后,依然可以稳定工作,整个电梯结构并没有出现松散、安装精度降低等情况,且各零件的疲劳性也没有出现明显的降低.我们还模拟真实环境对模型电梯的安全系统进行了测试,我们用模拟障碍物法对模型电梯门的防夹系统进行了上万次测试,结果表明整个系统工作十分可靠,测试过程中没有发生过电梯门夹持现象.我们还采用突然断电法对电梯的减速系统进行测试,结果表明在电梯系统断电后,安全钳就会立即启动,让电梯安全、可靠的停止下来.
从整个测试过程中我们可以得出整个模型电梯结构稳定可靠,轿厢上下运动平稳、可靠,和真实电梯十分相像,且因为大量采用了框架结构,非常适合在教学中使用.我们还对电梯的可拆装功能进行了实际验证,结果表明模型电梯非常便于拆装,且多次拆装后并没有对电梯的实际运行产生非常大的影响.我们还对电梯的安全系统进行了测试,表明该模型电梯的安全性完全有保证,能够在教学活动中保证教学人员和学员的人身安全.
3 结语
随着电梯使用越来越普遍,对从事电梯设计和维护人员的需求量也在日益增多,一些大中专院校开设了电梯专业.电梯专业是一门实践要求比较高的专业,电梯模型的出现,能很好提高该专业学生的动手实践能力,使其走向工作岗位后,能更快适应工作需要.
[1]丁镔.PLC控制四层电梯教学模型设计[J].现代制造技术与装备,2010(4):33-35.
[2]陈资滨.电梯教学模型的研制[J].基础自动化,2001,8(1):59~60.
[3]陈继文,杨红娟,李彦凤等.电梯控制技术实验教学研究与探讨[J].山东建筑大学教育教学研究文集,2008(1):217-218.
[4]殷勤,潘斌.PLC在电梯教学模型控制系统中的应用[J].机电工程技术,2012(11):49-52.
TU857
A
1671-0711(2017)11(下)-0147-03
江苏省高等职业教育产教深度融合实训平台项目-quot;智能电梯制造与维护实训平台quot;阶段性研究成果.
猜你喜欢
机电工程技术(2022年8期)2022-09-22
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
老年博览·上半月(2022年3期)2022-03-21
中学生理科应试(2021年10期)2021-12-07
中国特种设备安全(2019年8期)2019-10-14
中国特种设备安全(2019年7期)2019-09-10
快乐作文(3.4年级)(2019年2期)2019-09-10
中国特种设备安全(2019年4期)2019-05-20
中国特种设备安全(2019年1期)2019-03-13
装备机械(2017年4期)2018-01-23
