
基于BD930板卡的RTK测量系统研制
2017-11-29 08:27黄劲松史小奇冯庚绪吴建华
测绘通报 2017年1期
畅 毅,王 亮,黄劲松,史小奇,冯庚绪,3,吴建华
(1. 中国石油集团东方公司装备服务处长庆作业部,宁夏 银川 750006; 2. 武汉大学测绘学院, 湖北 武汉 430079; 3. 中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
基于BD930板卡的RTK测量系统研制
畅 毅1,王 亮2,黄劲松2,史小奇1,冯庚绪2,3,吴建华1
(1. 中国石油集团东方公司装备服务处长庆作业部,宁夏 银川 750006; 2. 武汉大学测绘学院, 湖北 武汉 430079; 3. 中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
针对物探测量作业中经常会遇到密林、峡谷、窄沟等遮挡严重的不良环境,导致可视卫星数减少、卫星信号不稳定,进而造成定位结果精度下降、作业效率降低等问题。本文提出了使用多系统兼容的高灵敏度BD930板卡作为接收机主板,给出了板卡的控制方法。研制出了一款实时动态定位手簿软件,并且利用网络通信技术搭建了差分数据链,多次在实际物探测量作业环境下对整个测量系统的性能进行了测试。结果表明,该系统在一定程度上提高了RTK适应困难环境的能力,所搭建的差分数据链使测量作业更加便捷、高效,能够满足工程应用的需要。
物探测量作业;多系统兼容;BD930板卡;差分数据链;RTK
RTK(real time kinematic)是利用全球导航卫星系统(global navigation satellite system,GNSS)进行实时动态相对定位的技术,在正常的观测条件下,具有精度高和效率快的特点,是物探测量中的主要技术手段。但在山地、密林等地区进行RTK测量时,由于植被或山体的遮挡,一方面容易造成卫星信号失锁[1],导致可用卫星不足;另一方面传统的无线电传输方式受限于“电磁波通视”[2],信号易衰减,传输距离受到限制,且电台功耗大,体积也大,影响作业效率[3]。
随着中国北斗导航卫星系统(BDS)、美国全球定位系统(GPS)以及俄罗斯全球导航卫星系统(GLONASS)等的相继建立与运营,为多系统组合定位创造了条件。多系统组合能够显著增加可用卫星数,增强卫星分布几何构型,提高定位的可靠性和精度[4-5]。
美国的Trimble公司生产的BD930板卡支持对GPS、GLONASS三频和BDS双频的信号跟踪,该板卡采用了成熟的Trimble低仰角跟踪技术,且可以获得低噪声、低多路径、高动态的伪距观测数据以及1 Hz带宽误差lt;1 mm的低噪声载波相位观测值,BD930板卡的部分性能参数见表1。
由表1可知,BD930板卡支持多种差分协议,并具备自主故障检测排除(FDE)功能和接收机自主完整性监测(RAIM)功能,能够提供厘米级精度的RTK定位结果。

表1 BD903板卡部分性能参数
鉴于BD930板卡的优越性能,本文使用该板卡作为接收机主板,控制其进行多系统组合RTK定位,增加可视卫星数。同时利用网络通信代替无线电通信,搭建差分数据链,可以提高作业效率[6]。并且研制一套基于BD930板卡的RTK测量系统,以满足物探测量中实际应用的需要。
1 BD930板卡控制
1.1 蓝牙通信
上海敦锋公司的PB100接收机内置了BD930板卡,并且具备蓝牙模块,本文正是通过蓝牙接口控制该设备的。蓝牙是一种短距离通信技术,现在多数移动终端都支持蓝牙功能。蓝牙通信避免了数据线连接、设备驱动的安装等烦琐的步骤[7]。
本文以Android系统的移动终端作为手簿使用,Android系统从2.0版本之后开始支持蓝牙,并且提供BluetoothAdapter、BluetoothDevice和BluetoothSocket 3个主要的蓝牙开发类,这些类包含完善的API函数,可以方便地进行蓝牙程序开发。
其中,BluetoothAdapter类可以实现蓝牙搜索、蓝牙信息(名称和Mac地址等)的获取、打开或关闭蓝牙等功能;BluetoothDevice类可以描述一个蓝牙设备;BluetoothSocket类可以创建蓝牙,Socket(套接字)与远程蓝牙设备建立连接并交换数据[8]。
蓝牙通信的一般步骤是:①搜索蓝牙,找到周边可以被检测到的蓝牙设备;②请求配对,验证PIN码(对于单片机,一般为“1234”)以完成配对;③数据传输或者断开蓝牙等操作。蓝牙通信的具体程序实现流程如图1所示。
1.2 二进制控制命令
BD930板卡支持Trimble特有的二进制数据传输协议,根据其二进制接口控制文件,可以获知大部分控制命令及数据包的基本结构,见表2。

图1 蓝牙通信程序流程

字节数项含义0STX(02h)起始标志1STATUS接收机状态2PACKETTYPE数据包类型3LENGTH数据流的字节数4~Length+3DATABYTES数据流Length+4CHECKSUM校验值Length+5ETX(03h)结束标志
编写二进制命令,利用蓝牙发送给BD930板卡,可以完成一般设置(如截止高度角、截止PDOP、RTK定位模式、工作模式、测量频率等),还可以选择卫星系统、差分数据和结果数据输出格式等。
定位结果数据以NMEA-0183、RT17/RT27的格式通过蓝牙输出,根据这两种格式进行解码,可以获得详细的定位信息(如大地水准面差距、坐标信息、速度信息、卫星情况、精度信息和解算信息等)。
2 差分数据链搭建
2.1 网络通信
本文利用网络通信来传输差分数据,因为现在网络十分普及,尤其是移动互联网覆盖较广,只需在移动终端插入SIM卡,即可进行网络通信。与传统无线电传输方式相比,网络通信的传输距离不受限制,并且不再需要电台及蓄电池。
网络通信可以通过Socket编程实现,网络上两个程序建立双向的通信连接并交换数据,这个双向链路的两端分别为一个Socket,由IP地址和端口号唯一确定。对于在Android/Windows/Unix系统环境下,Socket编程主要是指基于TCP/IP协议的网络编程。
利用Socket来实现网络通信,使用Socket的函数建立连接并进行数据收发,Socket之间的连接过程主要包含服务端监听、客户端请求、连接确认,程序实现基本流程如图2所示。

图2 网络通信基本过程
客户端程序运行在Android系统上,根据系统提供的Socket类,构造客户端Socket,方法如下:
Socket(String host,int prot)
其中,address和port分别是双相连接中服务器的IP地址和提供的端口号,如
Socket client=new Socket(quot;121.42.8.170quot;,4952)
0~1023的端口号为系统所保留,如http服务的端口号为80,telnet服务的端口号为21,FTP服务的端口号为23,因此在选择端口号时,最好选择一个大于1023的数以防止发生冲突。
由于需要知道服务端的IP和端口,因此可使服务端程序运行在具有公网IP的服务器(Ubuntu/Windows系统)上,客户端可以随时进行连接。
2.2 转发机制

图3 差分数据传输示意图
本文所搭建的数据链由基准站和流动站的移动终端以及网络服务器构成。在数据通信过程中,基准站和流动站的移动终端分别作为客户端与具有固定IP地址的网络服务器建立连接。从基准站得到sCMRx格式的差分数据流,经过中转网络服务器转发给各个流动站的移动终端。流动站的移动终端接收到基准站的差分数据后,再通过蓝牙将数据写入到板卡中,即可以进行RTK解算,获得定位结果。整个数据链的传输过程如图3所示。
3 BD930测量手簿软件
使用Java语言开发了一款基于Android系统的测量手簿软件,该软件主要包括两种工作模式:①基准站工作模式,可以设置参考站坐标、差分数据格式等;②流动站工作模式,主要可以进行RTK测量和静态测量,此外还提供了项目管理、数据管理和实用工具等功能。软件的功能模块如图4所示。

图4 软件功能模块
其中,RTK测量功能可以连接网络服务器获取差分数据流,并监视网络连接状态,同时设置板卡或向板卡写入差分数据(BD930板卡将自动调用内置的RTK定位程序进行基线解算),还可以读取板卡返回的数据流(NMEA-0183、RT17/RT27)并进行解码,得到详细的定位结果,用于进行导航放样或测量结果记录,具体程序实现流程如图5所示。
此外BD930测量手簿软件已具备较完善的操作界面,图6所示为RTK测量功能的运行界面,具有一定的可视化功能,用户可用性较好。
4 系统测试与分析
4.1 试验1分析
试验1于2015年7月27日在甘肃省平凉市泾川县进行,基准站架设在中国石油集团东方地球物理勘探有限责任公司的外业营地,流动站则在密林等困难环境下进行RTK测量。由于在该地区移动网络信号较差,中间有一段时间出现差分数据传输受阻,导致不能顺利得到固定解,因此这里截取其中一段路线的测量结果,路线如图7所示。

图5 RTK测量功能程序实现流程

图6 RTK测量功能运行界面
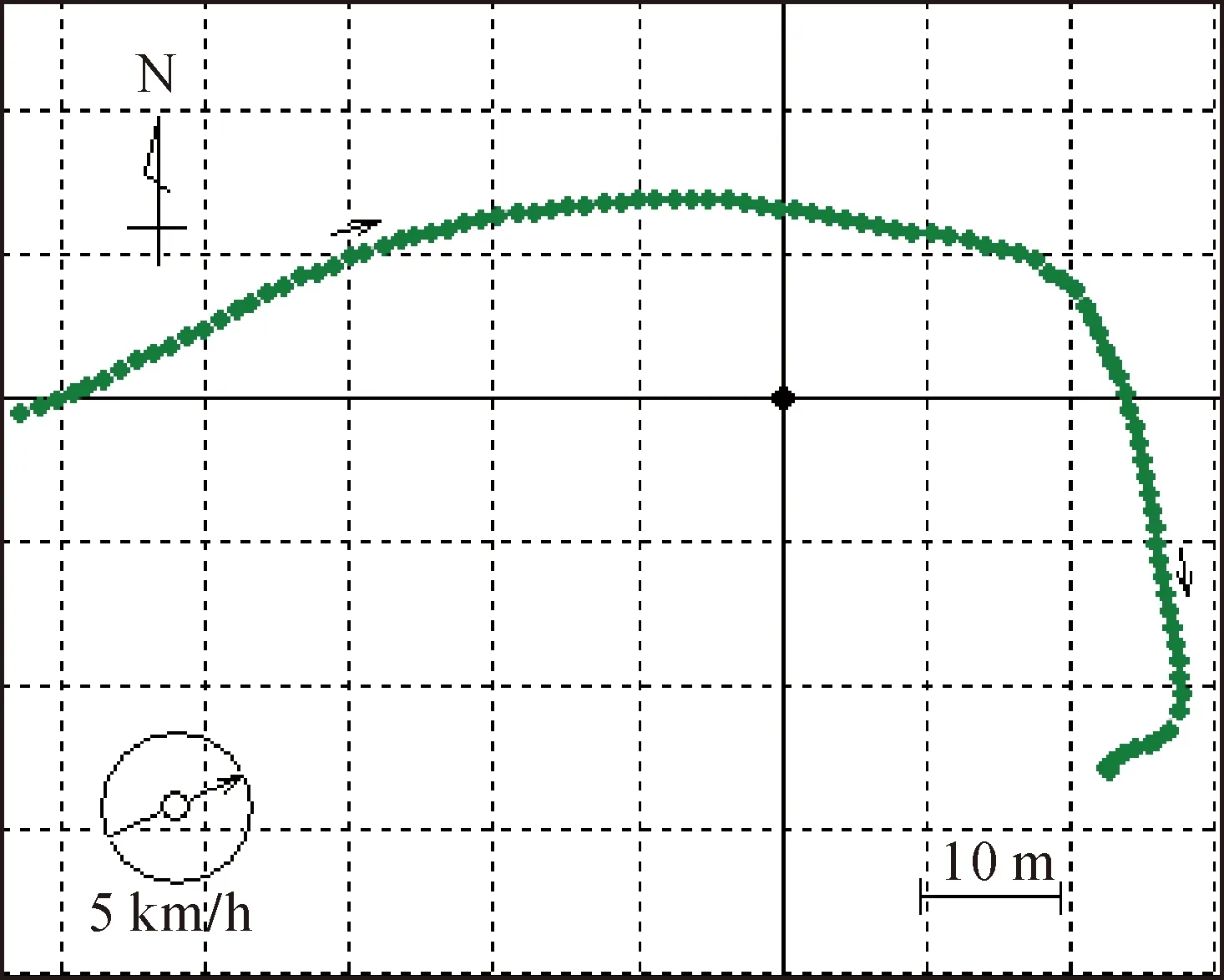
图7 试验1测量结果路线
图7中的这段路线是沿着山丘上路旁的树下行走的,树木和山体形成了一定的遮挡作用,结果表明使用基于BD930板卡的测量系统可以得到固定解。该测量系统采用高灵敏度板卡和多个卫星系统组合RTK定位模式,在困难环境下,也可以跟踪到足够的卫星,测量中卫星数的变化如图8所示。

图8 卫星数变化
由图8可知,在试验1中流动站跟踪到的卫星数最小为18颗,最大是27颗,使用的卫星数最小为5颗,最大是15颗,跟踪到的卫星数基本比对应历元上使用的卫星数多10颗以上。这是因为使用的卫星是基准站和流动站的共视卫星,另外高度角小于截止高度角、存在故障的卫星也会予以排除,不参与定位解算。
此外,可以计算每个历元的位置精度因子(PDOP)、几何精度因子(GDOP)和观测值残差的均方根误差RMS,得到变化曲线如图9所示。

图9 精度衰减因子和残差均方根误差
由图9可知,观测值残差均在2 cm以内,说明观测值数据质量较为稳定,但是PDOP和GDOP值较大,说明了卫星分布几何构型较差。此外,还可以得到定位结果坐标分量的中误差,并绘制成随时间变化的曲线,如图10所示。

图10 定位结果中误差
由图10可知,N、E方向坐标分量的中误差十分接近,均在4 cm以内,而U方向坐标分量的中误差较大,最大中误差约为0.15 m,但大部分历元的中误差都为厘米级水平,说明内符合精度较好。
4.2 试验2分析
鉴于试验1中测量结果没有跟已知坐标作比较,为了检验本测量系统的绝对定位精度,因此2016年4月1日在宁夏回族自治区银川市完成了试验2,方法是使流动站分别在5个固定点上进行RTK测量,将得到的定位结果与已知坐标进行比较。
由于固定点个数有限,为了尽可能获得较多的定位数据并进行精度分析,在测试过程中,对每个固定点重复测量4~5次,每次测量的定位结果也记录1~11个历元,将每次RTK测量定位结果的坐标(WGS-84坐标)分量分别跟已知坐标分量作差,得到定位误差,误差的具体数值见表3。

表3 固定点测量结果与已知坐标比较
由表3可知,各个固定点上每次定位结果的坐标分量(X,Y,Z)的误差都在厘米级水平,为了便于直观地分析绝对误差的分布情况,可将各个点的定位结果误差绘制成曲线,如图11所示。

图11 试验2定位误差
由图11可以看出,X分量的误差均在1.5 cm以内,Z分量的误差均在2.5 cm以内,Y分量最大不超过6 cm,因为在该地区高程方向最接近WGS-84坐标系的Y轴,而受到卫星信号传播路径上的误差影响, 高程方向上的定位精度相对水平方向上的精度要差。但是总体而言,由于在固定点上的遮挡较少,观测环境良好,试验2的结果表明,基于BD930板卡的RTK测量系统可以达到几个厘米的定位精度,而物探测量要求平面位置精度也是厘米级[9-10]。
5 结束语
利用多系统兼容、高灵敏度BD930板卡作为接收机主板进行多系统(GPS、BDS、GLONASS等)组合RTK定位,在密林、峡谷等遮挡严重的困难环境下,可以显著增加可用卫星数,保证足够的、质量良好的卫星数据,从而提高获得固定解的概率。同时采用移动网络通信代替传统的无线电搭建差分数据链,省去了笨重的电台及其蓄电池,从而使外业操作更加简单,提高作业效率,降低了成本,且数据传输距离不受限制。此外开发了一款基于Android系统的测量手簿软件,利用了蓝牙通信技术控制板卡,该软件具备较为完善的用户界面,并提供了一定的可视化功能。实地测试证明,本文研制的RTK测量系统是可行的,在困难环境下具有一定的适应能力,并且能够获得较高精度(厘米级)的定位结果,可以满足物探测量等实际应用的需要。
[1] 畅毅,邓晨斌,黄劲松,等. 联合码伪距和载波宽巷组合的相对定位技术研究[J]. 导航定位学报,2015,3(2):102-106.
[2] 屈凯锋. GPRS/CDMA数据链RTK在铁路测量中的优势及相关设置[J]. 山西建筑,2014,40(13):236-238.
[3] 刘全海,庄文彬,谢中华. RTK测量中的GPRS数据链设计[J]. 城市勘测,2007(4):40-43.
[4] 汪亮,李子申,袁洪,等. BDS/GPS/GLONASS组合的双频单历元相对定位性能对比分析[J]. 科学通报,2015,60(9):857-868.
[5] 隋春玲,谢建涛,于合理,等. 基于GPS/GLONASS/BDS组合的单历元单频短基线RTK定位算法研究[J]. 测绘与空间地理信息,2015,38(10):154-157.
[6] 巴合提亚尔,卡吾力江,聂波,等. 基于GPRS的GPS RTK技术在油田地面工程数据采集中的应用[J]. 测绘与空间地理信息,2011,34(5):122-126.
[7] 钱志鸿,刘丹. 蓝牙技术数据传输综述[J]. 通信学报,2012,33(4):143-151.
[8] 李黎国,张辉,程号. 基于Android健康服务终端蓝牙传输软件的设计[J]. 电子科技,2012,25(5):115-118.
[9] 畅毅,张小红,郭斐,等. 非差PPP快速静态定位在物探测量中的应用[J]. 测绘科学,2012,37(5):33-48.
[10] 祝会忠.基于非差误差改正数的长距离单历元GNSS网络RTK算法研究[J].测绘学报,2015,44(1):116.
DevelopmentofRTKMeasurementSystemBasedonBD930Board
CHANG Yi1,WANG Liang2,HUANG Jinsong2,SHI Xiaoqi1,FENG Gengxu2,3,WU Jianhua1
(1. Equipment Department of BGP, China National Petroleum Corporation, Yinchuan 750006, China; 2. School of Geodesy and Geomatics, Wuhan University, Wuhan 430079, China; 3. China Electronics Technology Group Corporation 54th Research Institute, Shijiazhuang 050081, China)
Geophysical survey often encounters adverse environment jungle, canyons, narrow ditch and so on. This results in the number of visible satellites reducing and unstable satellite signal. Then it causes the accuracy of the positioning results decrease, working efficiency reduce and so on. Towards this problem,the use of multi-system compatible and highly sensitive BD930 board as the receiver main board is proposed, and the control method of the board is showed. In addition,a set of real-time kinematic positioning hand-book software is developed, and the differential data chain is built through network communication technology. Tests on the performance of the whole measurement system under actual geophysical survey work environment are completed. Results show that to some extent the system improved the ability of RTK to adapt to different environments, the differential data chain built up makes the measurement operation more convenient and efficient, and the needs of engineering application can be met.
geophysical survey; multi-system compatible; BD930 board; differential data chain; RTK
P228.4
A
0494-0911(2017)01-0097-05
畅毅,王亮,黄劲松,等.基于BD930板卡的RTK测量系统研制[J].测绘通报,2017(1):97-101.
10.13474/j.cnki.11-2246.2017.0021.
2016-05-19
中国石油集团东方公司装备服务处科研项目(12-13-13-2014)
畅 毅(1966—),男,高级工程师,主要从事GNSS及测绘新技术在石油工程测量等科研和应用方面的工作。E-mail:chp_2001@163.com
猜你喜欢
电子世界(2022年1期)2022-07-23
铁道通信信号(2020年8期)2020-02-06
电子制作(2019年15期)2019-08-27
通信电源技术(2018年3期)2018-06-26
电子制作(2018年1期)2018-04-04
科教导刊·电子版(2017年32期)2018-01-09
电子制作(2017年17期)2017-12-18
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03
电子制作(2017年23期)2017-02-02
