
一种基于CMA-ES的制导工具误差分离方法研究
2017-11-25 02:15韩成柱张志国
航天控制 2017年4期
韩成柱 梁 红 张志国
91550部队,大连116023
一种基于CMA-ES的制导工具误差分离方法研究
韩成柱 梁 红 张志国
91550部队,大连116023
为提高制导工具误差线性模型求解精度,基于优化模型,利用进化策略方法实现了对制导工具误差线性模型的求解,并研究了遥、外测数据随机误差对制导工具误差线性模型求解精度的影响。仿真结果表明,该方法优于主成分法,制导工具系统误差系数估计值与仿真均值之差均比标准差小3倍,遥测数据随机误差对环境函数的影响较小,遥外差数据随机误差对线性模型求解精度影响较大,制导工具系统误差的最大偏离真值量比标准差大1倍。
误差分离;制导工具系统误差;进化策略
惯性制导系统的精度是飞行器命中精度的最大影响因素。制导系统误差分为方法误差和工具误差,而后者引起的飞行器落点偏差约占总误差的80%左右。实践证明,仅从硬件上提高惯性器件的精度是有限的[1],而采用误差补偿技术,即从软件上建立精确的、便于分离制导工具系统误差系数的模型,并给出高精度参数估计方法,是提高飞行器精度的关键技术之一。
传统的制导工具系统误差分离方法的基本思路是:建立描述惯性器件的线性、非线性回归模型,然后利用诸如最小二乘方法等参数估计方法解此回归模型[1-2]。对于惯性工具误差模型来说,由于各误差系数项之间的相关性等因素,使得设计矩阵条件数巨大,虽可采用有偏估计方法,提高参数估计的精度,但效果仍不理想。
徐德坤[3]和蒋小勇[4]另辟蹊径,避开环境函数求逆,将线性回归问题转化为一个目标函数求极值问题,从而利用进化策略寻优方法分离误差系数,得到了较好的结果,但它们都没有进行模型优化。本文将在优化模型的基础上,研究遥、外测数据随机误差对进化策略误差分离结果的影响,并与主成分法[1](非线性回归模型参数的有偏估计方法)进行了比较,结果表明CMA-ES法所得结果要优于主成分法。
1 进化策略的误差分离方法
1.1 制导工具系统误差系数分离的模型
制导工具系统误差系数分离的线性模型可描述为:
ΔW=SC+ε
(1)
其中,ΔW为3n×1维惯性系下遥外差观测向量;C为m×1维待分离的误差系数向量;S为与C对应的3n×m维环境函数矩阵;ε为3n×1维观察误差,为白噪声;n为观测采样点个数,m为制导工具系统误差项数,且3ngt;m。
为能应用于进化策略算法,此线性回归模型可改写为如下优化模型:
(2)
其中,var(ΔW)为遥外差数据方差;g(C)为系统约束函数。
1.2 进化策略
进化策略算法中,其个体中含有随机扰动因素,且以个体的变异运算为主要搜索技术,因而具有快而强的全局优化能力[3-8]。为优化设置进化策略自身参数,N.Hansen[7]引入一种协方差矩阵自适应进化策略(Covariance Matrix Adaptation Evolution Stragety,CMA-ES)。CMA-ES主要基于突变因子分布的自适应机制实现进化策略参数优化调整,使随机生成的初始解通过复制、交换、突变和选择等遗传操作不断的迭代进化,逐步逼近并最终得到最优解[8-11]。
应用CMA-ES进行误差分离基本过程为:
1)初始化种群。初始种群服从正态分布,根据下式初始化种群:
xi~Ni(m,σ2C)=m+σNi(0,C)=m+σzi
(3)
其中,m为均值向量,i为种群规模,σ为步长,C为协方差矩阵,初始化为单位阵。
2)更新均值向量m。根据适应度函数,即残差平方和排序后前h项残差平方和SLTS,计算当代种群中每个个体的适应度值并排序,选择最优子群根据下式赋值(子群规模u一般为种群规模的0.3倍):
(4)
其中,wi为权重,适应度函数小的取最大权重,zi:λ是服从正态分布的随机数。
3)更新协方差矩阵C

(5)
(6)
其中,ccov≈2/n2,cc≈4/n,n为维度,ueff为待分离的工具误差系数,其中ueff≈0.3λ,ccov≈ueff/n2,n2为比例系数,一般取值在2~4之间,ucov=ueff,pc是C的权重差分和。
4)更新步长σ
(7)
(8)

5)循环过程2)~4),直到设定的条件,如子代数到达1000代,或两代间的误差到达1×10-6,最优子代即为参数估计解。
1.3 方法的求解流程
根据上述原理,利用CMA-ES即可实现对制导工具系统误差的分离,同时研究遥外测数据质量对求解精度的影响,求解计算流程如图1所示。

图1 求解计算流程图

2 影响因素分析
本算例中遥外测线性模型的制导工具误差系数包括24项:C1,C2,…,C24,经过对飞行器纵向、横向落点偏差对误差系数偏导数,误差系数对遥外差数据影响等模型优选方法的分析,误差系数优选为12项:C1,C2,C3,C13,C14,C15,C18,C19,C20,C22,C23和C24。由此可通过改变ε大小来分析遥测数据随机误差对CMA-ES法求解精度的影响,改变η的大小来讨论遥外差数据随机误差对求解精度的影响。
2.1 遥测随机误差对求解精度影响

现将η设置为方差为σ(η)=[0.03m/s,0.03m/s,0.003m/s]的白噪声,改变遥测随机误差ε的方差为[0.05m/s,0.05m/s,0.005m/s]、[0.04m/s,0.04m/s,0.004m/s]和[0.03m/s,0.03m/s,0.003m/s],优化所得的DB值如图2所示。可以看出,当遥测随机误差的方差增大时,误差系数的估计值基本不变。分析其原因,在此仿真过程中,遥测数据的精度仅影响了环境函数S,而环境函数S是遥测速度和加速度的积分,导致环境函数S的数值量级较遥测数据方差巨大,从而S矩阵变化很小,故误差分离结果不受遥测数据精度的影响。但实际误差分离时,遥测数据的精度还影响了遥外差,从而影响误差分离结果,本节不单独讨论它,而将其并入遥外差数据中,在下节讨论。
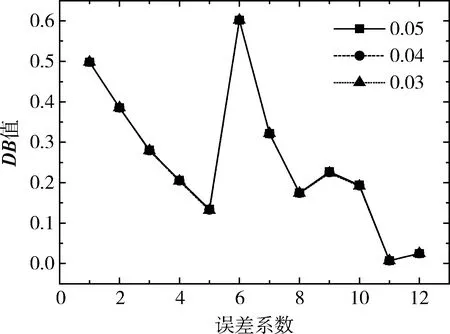
图2 不同遥测随机误差时,各误差系数 所对应的DB值
2.2 遥外差数据随机误差对求解精度影响
现设定σ(ε)=[0.03m/s,0.03m/s,0.003m/s],而改变遥外差数据随机误差方差σ(η)为[0.04m/s,0.04m/s,0.004m/s]、[0.03m/s,0.03m/s,0.003m/s]、[0.02m/s,0.02m/s,0.002m/s]和[0.01m/s,0.01m/s,0.001m/s],所加随机误差序列相同,幅值不同,从而得到不同方差的白噪声,经CMA-ES求解得到的DB值如图3所示。由图可知,所有DB值均小于3,即所有12项所选误差系数均能很好的分离出来。但随着遥外差数据随机误差的变大,DB值变大,即求解精度变差。且各误差系数的DB值随方差变化幅度不同,显然变化幅度大的误差系数容易导致模型的病态。
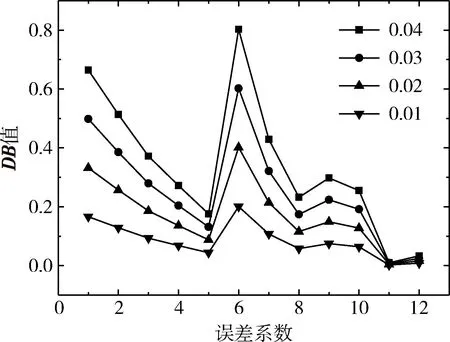
图3 不同遥外测随机误差时,各误差 系数所对应的DB值
3 仿真验证及对比
为考查基于优化模型的CMA-ES应用效果,讨论不同白噪声随机序列对求解精度的影响。设σ(ε)=[0.03 m/s,0.03 m/s,0.003 m/s],σ(η)=[0.02 m/s,0.02 m/s,0.002 m/s],4组不同随机序列所对应的优化结果如图4所示。可以看出,不同随机序列所对应各DB值变化较大,没有明显的规律,可以理解为生成白噪声序列时,若该白噪声某处的峰值(即数据鼓包)较大时,对应的优化精度较差。故在实际误差分离中,应尽量减小遥外差数据的随机误差、尖峰和鼓包等,使得遥外差数据尽量光滑[12-13]。图5对比了相应随机序列利用主成分法得到的参数估计结果,对比图4,发现主成分法所得DB更大,即CMA-ES法所得结果优于主成分法所得结果。
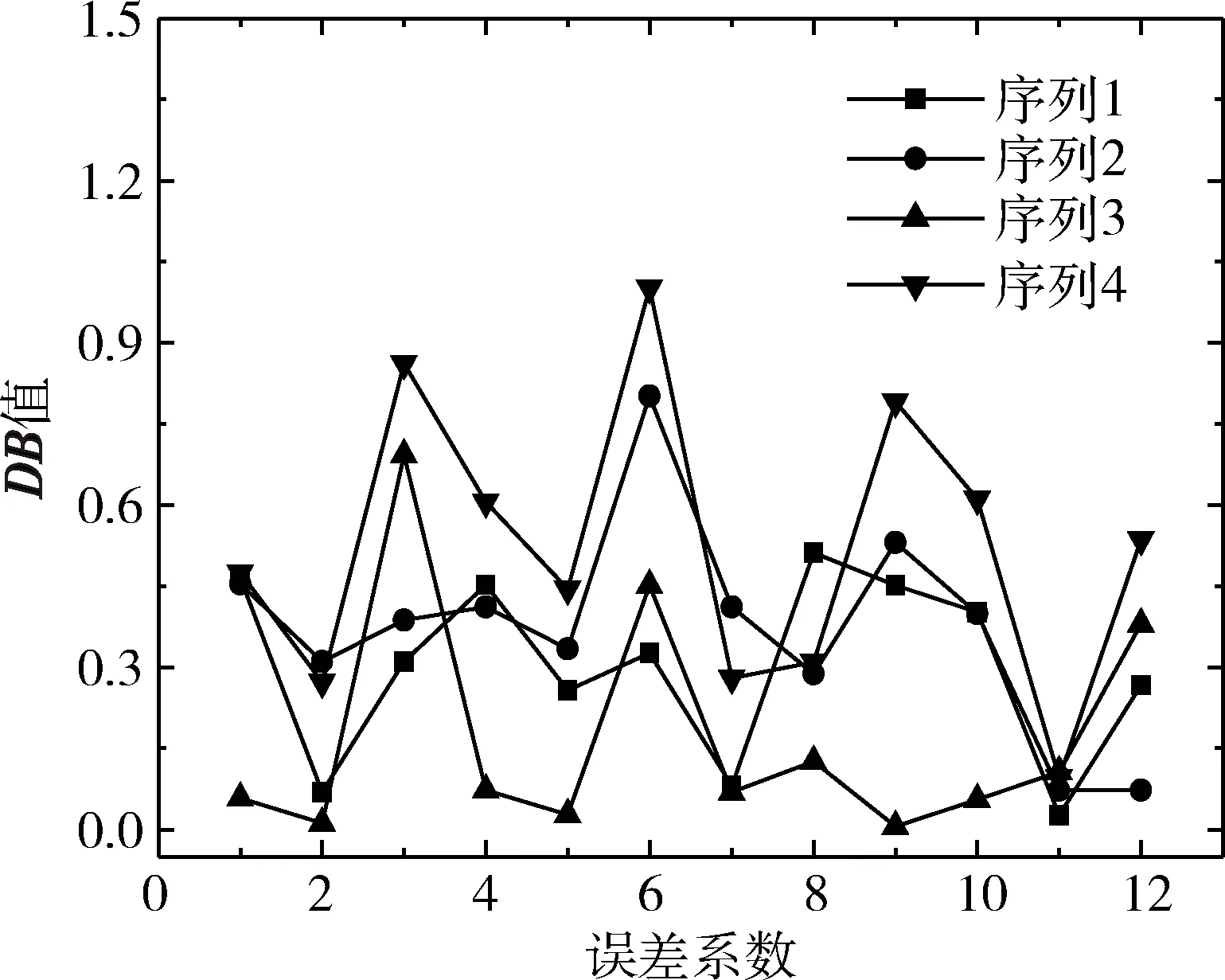
图4 4组不同随机序列对应的误差分离结果
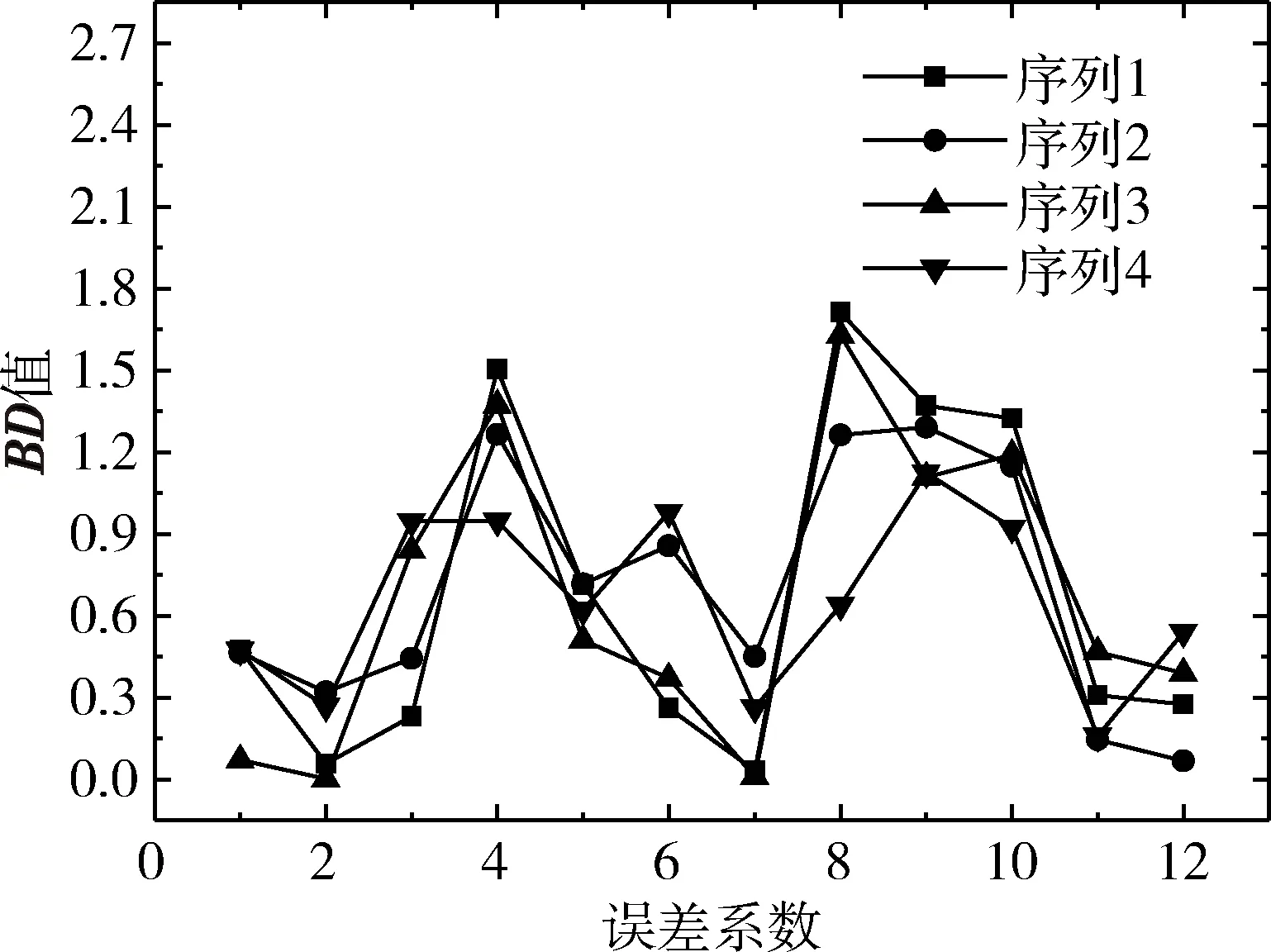
图5 4组不同随机序列利用主成分法误差分离结果
4 结论
利用CMA-ES研究了遥外测数据随机误差对遥外测线性模型求解精度的影响。研究结果表明,遥测数据方差对环境函数的影响较小;而遥外差数据方差对线性模型求解精度影响较大,最大偏离真值达2倍于地面测试标准偏差。故在实际误差分离时,应尽可能使遥外差数据平滑。
[1] 王正明,易东云,周海银.弹道跟踪数据的校准与评估[M].长沙:国防科技大学出版社,1999: 93-97,328-338.(Wang Zhengming, Yi Dongyun ,Zhou Haiyin. The Calibration and Evaluation of Trajectory Tracking Data [M].Changsha:Press of National University of Defense Technology,1999:93-97,328-338.)
[2] 姚静,段小君,周海银.海态制导工具系统误差建模与参数估计[J].弹道学报,2005,17(1): 33-39.(Yao Jing,Duan Xiaojun,Zhou Haiyin.Modeling and Parameters Estimation of Marine Guidance Instrumentation Systematic Error[J].Journal of Ballistics,2005,17(1):33-39.)
[3] 徐德坤,刘伟,孟云鹤,等.基于进化策略的误差分离方法[J].宇航学报,2008,29(1):352-356.(Xu Dekun,Liu Wei,Meng Yunhe, et al.Evolutionary Strategies Based Error Sepration Method[J].Journal of Astronautic,2008,29(1):352-356.)
[4] 蒋小勇,孟云鹤,郑伟.基于进化策略的潜射弹道导弹弹艇误差分离技术研究[C].第24届飞行力学与飞行试验学术交流年会论文集, 2008,9:205-210.(Jiang Xiaoyong,Meng Yunhe ,Zheng Wei .Research on Separation of Missile and Submarine-launched Ballistic Missile[C]. The Twenty-fourth Session of China Flight Dynamics and Trial Conference,2008,9:205-210.)
[5] SKeerthi S S. Efficient Tuning of SVM Hyper Parameters Using Radius//Margin Bound and Iterative Algorithms[J]. IEEE TransNeuralNet-works, 2002, 13(5): 1225-1229.
[6] Kaibo Duan, S Sathiya Keerth,Aun Neow Poo. Evaluation of Simple Performance Measures for Tuning SVM Hyperparameters [J].Neuro Computing, 2003, 51: 41-59.
[7] Nikolaus Hansen. The CMA Evolution Strategy:A Comparing Review[C ].Towards a New Evolutionary Computation. Berlin:Springer, 2006:75-102.
[8] Hansen N,Ostermeier A.Completely Derandomized Self-adaptation in Evolution Strategies[J]. Evol Comput, 45,159-195, 2001.
[9] Nikolaus Hansen,Andreas Ostermeier. Completely Derandomized Self-adaptation In Evolution Strategies[J]. Evolutionary Computation,2001, 9(2): 159-195.
[10] J Platt. Fast Training of Support Vectormachines Using Sequential Minimal Optimization[M]. Advances in Kernel Methods-Support VectorLearning. Cambridge, MA:MIT Press,1999:185-208.
[11] Chang Chihchung,Lin Chihjen.LIBSVM:a Library for Support Vector Machines (Version 2·88)[R].Department of Computer Science and Information Engineering, National Taiwan University, Taipe, Taiwan, 2008.
[12] Runarsson T P,Yao X. Stochastic Ranking for Constrained Evolutionary Optimization[J]. IEEE Transactions on Evolutionary Computation, 2000,4(3):284-294.
[13] Runarsson T P,Yao X. Search Biases in Constrained Evolutionary Optimization[J]. IEEE Transactions on System, Man, and Cybernetics: Part C,X,No.XX, Month 2004(SMCC KE-09).
ResearchoftheGuidanceInstrumentErrorSeparationBasedontheCMA-ES
Han Chengzhu, Liang Hong, Zhang Zhiguo
Unit 91550 PLA, Dalian 116023, China
Theevolutionarystrategiesmethodbasedontheoptimizationmodelisusedinsolvingtheguidanceinstrumenterrorslinearmodel.Andtheeffectoftherandomerrorofthetrackingandtelemetrydatatosolvetheguidanceinstrumenterrorlinearmodelisstudied.Thesimulationresultsshowthatthismethodisbetterthanprinciplecomponentanalysismethod,thedifferencebetweentheestimationvalueandthesimulationmeanvalueofguidancetoolsystemerrorcoefficientislessthan3timesthestandarddeviation,theeffectofthetelemetrydate’srandomerrortoenvironmentalfunctionsissmall,theeffectofthetelemetry-trackingdeviationtosolvetheguidanceinstrumenterrorlinearmodelisbigandthebiggestdifferencebetweentheguidanceinstrumentsystemerrorandthemeanvalueisbiggerthanonetimethestandarddeviation.
Errorseparation;Guidanceinstrumentsystemerrors;Evolutionarystrategies

V448
A
1006-3242(2017)04-0048-04
2016-08-25
韩成柱(1979-),男,山东莱芜人,本科,工程师, 主要研究方向为遥、外测数据处理;梁红(1971-),女,大连人,硕士,高级工程师,主要研究方向为试验数据处理;张志国(1977-),男,重庆开县人,本科,高级工程师,主要研究方向为遥、外测数据处理。
猜你喜欢
组合机床与自动化加工技术(2021年11期)2021-11-29
电子制作(2019年11期)2019-07-04
电子测试(2018年13期)2018-09-26
声学与电子工程(2018年1期)2018-04-27
北京航空航天大学学报(2017年4期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
光通信研究(2016年6期)2016-12-13
系统工程与电子技术(2016年7期)2016-08-21
现代工业经济和信息化(2016年6期)2016-05-17
装备环境工程(2015年5期)2015-02-28
