基于激光雷达扫描观测的散布点污染源监测
2017-11-23 02:36李正强谢剑锋刘小强谢一凇陈兴峰
中国环境科学 2017年11期
吕 阳,李正强,谢剑锋,张 丰,刘小强,刘 诏,谢一凇,许 华,陈兴峰
基于激光雷达扫描观测的散布点污染源监测
吕 阳1,3,李正强1*,谢剑锋2,张 丰2,刘小强2,刘 诏1,3,谢一凇1,许 华1,陈兴峰1
(1.中国科学院遥感与数字地球研究所国家环境保护卫星遥感重点实验室,北京 100101;2.河北省环境监测中心站,河北石家庄 050000;3.中国科学院大学,北京 100049)
2015年6月11日在河北省石家庄市组织了一次激光雷达水平扫描观测实验,并通过动态阈值法提取了区域散布污染源的位置及传输路径.结果显示,近地面气溶胶空间分布不均匀,强排放点污染源的污染物水平传输距离可达4km.水平扫描观测模式不受地表类型影响,可以获得高空间分辨率的近地面气溶胶空间分布.不同高度角的测试观测表明,应尽量将观测点设置在区域高点并采用水平方式开展扫描.在污染区域提取环节,可利用代表区域本底大气的能见度来确定消光系数动态阈值,增强对于相对污染程度特征的提取效果.
激光雷达;扫描观测;散布点污染源;动态阈值
我国城市的空气污染以烟煤型为主,主要来源为工业企业、采暖锅炉、交通运输等[1].按照我国相关环保法律法规,大部分排污企业按要求安装了在线监测设备,进行污染排放浓度监测.但是,散布式污染源地理位置分散,部分企业未安装监测设备进行夜间偷排等问题仍存在.基于地基遥感技术的空气质量监测站能够提供连续的点源颗粒物浓度测量,但是站点数量有限,区域代表性较差[2].激光雷达技术是探测大气颗粒物的新型主动遥感工具[3-5].国内外大量的激光雷达系统用于空气污染监测、大气边界层高度监测等研究[6-8].偏振、拉曼、多波段、高光谱等激光雷达技术也层出不穷,可以获取更全面的气溶胶信息[9-12].而传统的微脉冲激光雷达具有价格低、性能稳定的优势,更适用于长时间、无人值守的监测需求.激光雷达探测大气一般采用垂直向上的观测方式,而将激光雷达观测模式改为水平方式[13-14],则可以获得探测区域范围内的近地面污染物分布特征和传输路径,也可定位污染源位置,为环境保护提供技术支撑.
2015年6月11日,利用地基微脉冲激光雷达在河北省组织一次扫描观测实验.为了将激光雷达信号统一为气溶胶浓度,通过FERNALD法将距离校正信号反演为气溶胶消光系数,从而根据气溶胶消光系数的大小来判断散布污染源位置.
1 实验部分
1.1 主要仪器
实验采用地基微脉冲激光雷达作为主要的观测仪器,该仪器型号为法国CIMEL公司生产的CE370-2[15].与被动式遥感系统相比,激光雷达主动式遥感系统能通过一个窄光束和一个小的发射激光,达到相当高的垂直分辨率.CE370-2是一种便于移动、对人眼安全、自动化操作激光雷达,采用了重复率4.7kHz的低功率实现脉冲的传输,其垂直分辨率为15m.CE370-2激光雷达的主要技术参数见表1.

表1 CE370-2型微脉冲激光雷达主要技术参数
1.2 实验地点
实验地点位于河北省西南部,太行山中段东麓,地势西高东低.区域内公路、煤场、矿场、水泥厂等散布.本文选择实验厂区内一楼顶作为观测点(图1),通过激光雷达扫描监测,分析污染传输路径和寻找可能污染点源.图1中观测点为仪器位置,灰色区域代表观测半径5km,扫描方位的东北到西南方向有厂房、山脉等遮挡物.

图1 实验地点示意
1.3 实验方案和测量流程

图2 观测点四周遮挡情况
为满足区域高点、有电力供应及便于仪器搬运的要求,选择观测点(114.458E, 37.598N)作为扫描观测位置.由于白天背景噪声强,信噪比低,并且夜间污染监测手段缺少,因此选择在夜间进行实验.但是激光雷达为主动遥感仪器,既可在白天观测也可在夜间观测.实验于2015年6月11日凌晨进行,当天风力较大,背景大气较清洁,污染传输较强.图2为观测点四周环境,可以看出观测点的东北、正北、西北方向有山脉遮挡,观测点的西北、正西、西南方向有厂房、建筑物遮挡,观测点的正南、东南、正东方向视野较为开阔,除远处的部分烟囱外没有遮挡.为了减少遮挡并分析不同高度角对观测结果的影响,将仪器的观测高度角分别固定为1°和5°,通过方位角方向的转动进行水平扫描观测.
利用定制的可水平和垂直方向转动的支架将仪器安装在观测点后,首先用遮光板将望远镜进行遮挡,测量残余脉冲.将观测高度角固定为1°,以正东方向为起始位置,以0.1°/s的速度水平方向进行360°逆时针匀速旋转测量.然后将观测高度角固定为5°,仍以正东方向为起始位置,以0.6°/s的速度水平方向逆时针匀速旋转测量.
2 数据获取与处理
2.1 激光雷达数据获取
激光雷达以激光为发射光源,激光束在大气中遇到空气分子、大气气溶胶等成分便会发生散射、吸收等作用,其中后向散射光落入接收望远镜视场被接收,从而获得距离、浓度等相关信息.其基本原理可以用公式来表示:

式中:()是接收的信号;为信号到激光雷达的距离,m;是激光雷达系统常数;是激光脉冲能量;是后向散射系数;2是双向透过率.BG、AP、DTC、()分别表示背景噪声、残余脉冲、探测器延时校正和重叠因子校正.
2.2 激光雷达信号校正
如公式1所示,大部分参数是与距离相关的函数.而激光雷达信号测量的是每秒的光电子数和距离.在对原始数据进行几个相应的校正后[16],可以获得距离校正信号,主要包括探测器延时校正、背景噪声校正、残余脉冲校正、几何因子校正、低通滤波、距离校正等.校正后信号用公式表达为:

2.3气溶胶消光系数反演
为了将激光雷达信号统一为气溶胶浓度,因此需要将距离校正信号反演为气溶胶消光系数[10].消光系数表示大气颗粒物对光的散射和吸收等作用的大小,表征了颗粒物浓度大小.常用的激光雷达消光系数反演方法有斜率法[17]、近端解法[18]、远端解法[19]、气溶胶光学厚度法[20]等.本文采用Fernald远端解法进行消光廓线反演,该方法将大气分为分子贡献部分(molecular,)和气溶胶贡献部分(aerosol,).根据Fernald后向积分法[21],气溶胶消光系数为:

式中:m和a分别是大气分子和气溶胶的消光后向散射比;c为参考高度,单位米;m和a分别为大气分子和气溶胶的后向散射系数.大气分子廓线采用美国1976标准大气模型.
2.4 污染区域动态阈值确定
为了便于查找污染源影响区域和污染传输路径,通过阈值法对大气气溶胶消光系数进行等级划分.尽管消光系数直接反映了污染程度,但是由于大气本身污染环境的不同,如果采用固定的阈值则可能在污染天超范围估计污染区域,而在晴好天过小估计污染区域.因此,需要一种与本底大气污染程度相适应的动态阈值,从而根据本底大气的污染程度调整阈值大小.
相对来说,大气能见度是全国各气象站常规观测的一个参数,站点一般设置在能够代表该站所在区域的天气气候特征的城市郊区和农村,能够从一定程度上代表区域的本底大气.Nebuloni总结了大气能见度、波长与消光强度的经验公式[22]:

式中:是由多次实验获得的:


将严重污染的动态阈值设为:
根据(7)和(8)将污染程度划分为3个等级,从而确定污染区域.
2.5 辅助数据
2.5.1 风力风向 在观测区域附近共有4个气象站分布,分别为高邑、元氏、临城和赞皇.各气象站的风速风力如表2所示,可以看出,实验时观测区域以西北风为主.

表2 观测点附近风速风力
2.5.2 大气能见度 由大气能见度(表3)数据可以看出,2015年6月11日0:00~2:00在观测区域附近空气晴好,大气能见度高,计算得到的1、2分别为0.1km-1和0.2km-1.

表3 观测点附近能见度和对应的消光系数
3 结果与讨论
3.1 大气垂直结构
2015年6月11日3:20~7:30(北京时间)在观测点进行约4h的垂直观测.图3和图4分别为距离校正信号和消光系数,从图3、图4可以看出天空晴朗无云.近地面气溶胶消光系数明显较低(小于0.1km-1).随着高度增加,气溶胶消光系数减小,但在高度3km左右有部分悬浮气溶胶层或薄云的存在.
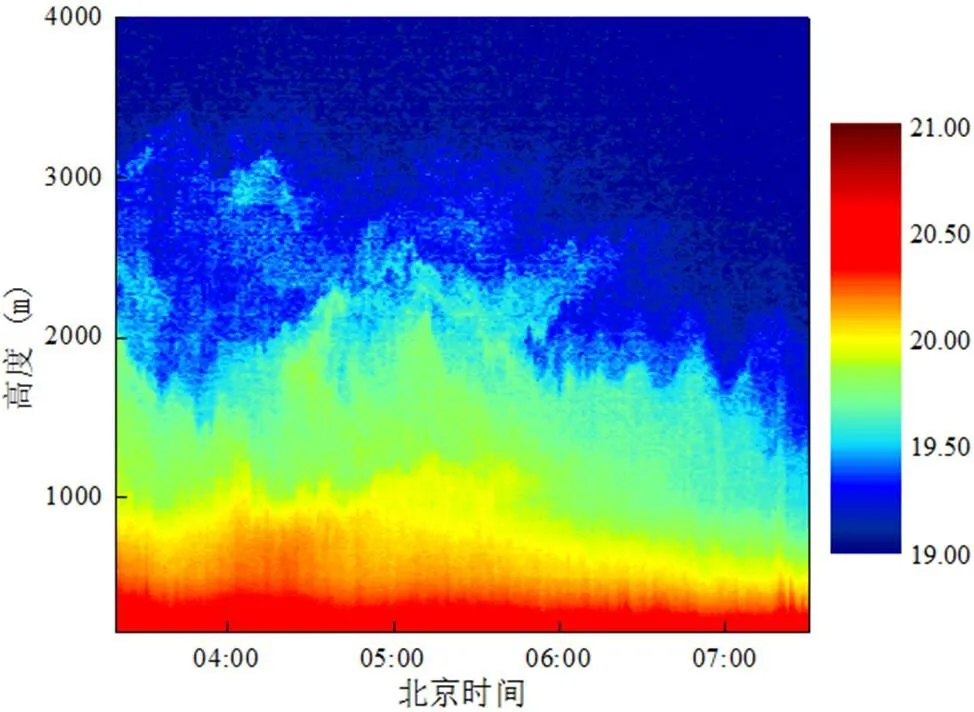
图3 2015年6月11日3:20~7:30 获得的激光雷达距离校正信号
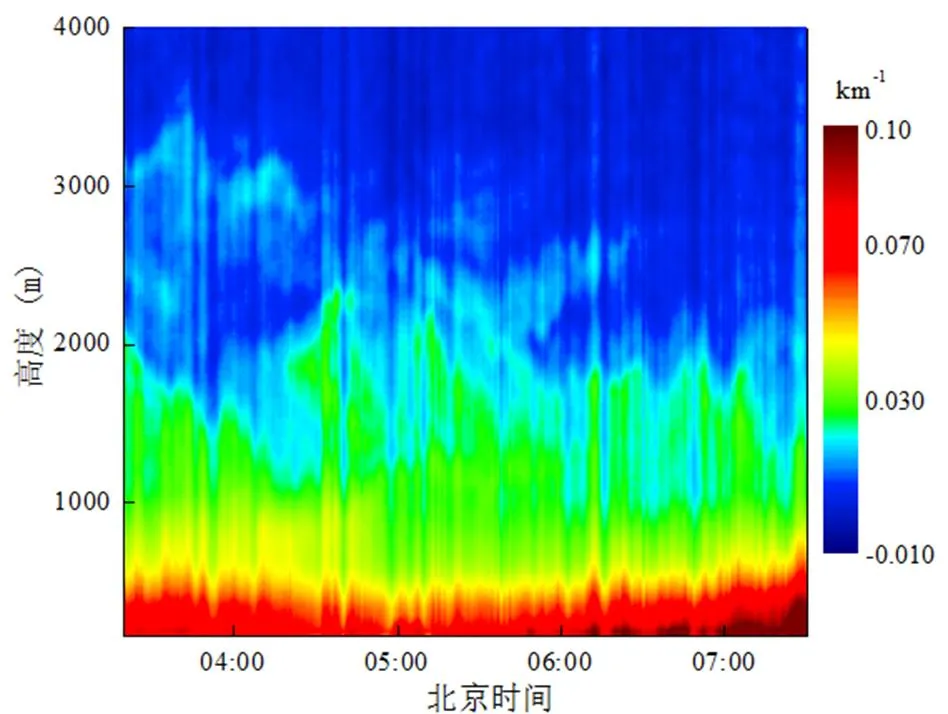
图4 2015年6月11日3:20~7:30气溶胶消光系数
3.2 水平扫描

图5 2015年6月11日0:00~1:00激光雷达水平扫描距离校正信号(高度角1°)
2015年6月11日0:00~1:00(北京时间)在观测点进行水平扫描观测,高度角1°.图5和图6分别为距离校正和气溶胶消光系数,可以看出厂区内颗粒物向东南方向传输的趋势,传输距离可达4km.地面气象站数据显示6月11日0:00和1:00,该地区附近以西北风为主,风力约为3~6m/s左右,与颗粒物传输方向一致.图6有几个消光高值区,认为是排污和污染传输区,其中没有排污和污染传输的地区,气溶胶消光系数明显较低(小于0.1km-1),而排污特别强的区域,气溶胶消光系数可达0.2km-1以上.2015年6月11日1:40~1:50(北京时间)在观测点进行第2次水平扫描观测,高度角5°,图7为反演的大气气溶胶消光系数,与图6相比,图7仍然可以看出厂区颗粒物向东南方向传输的趋势和厂区东南方向的矿山扬尘.由于第2次扫描高度角较高,在越过部分障碍物的同时,也越过了部分污染源,仅能够观测到观测点附近厂区的污染分布及污染传输,观测点东北方向的污染区无法获得观测,这是由于相对于2km的距离,4°的高度角差异使测量高度相差140m,大部分烟羽的垂直传输高度没有达到这一高度.

图6 2015年6月11日0:00~1:00气溶胶消光系数(高度角1°)
为了便于识别,根据能见度计算的消光系数,将阈值设为0.1km-1和0.2km-1,分别用绿色和红色区表示污染和严重污染.图8和图9分别为高度角为1°和5°时识别的污染区域.图8观测厂区及其南方有3个红色高峰区,分别为两个厂区排放产生的高浓度颗粒物和矿山的扬尘;观测点东北方向存在部分高浓度区,主要是由道路扬尘和散布小工厂产生的.图9由于高度角大,仅能识别近处的污染区域.

图7 2015年6月11日1:40~1:50获得的气溶胶消光系数(高度角5°)

图8 根据气溶胶消光系数确定的相对污染程度特征(高度角1°)

图9 根据气溶胶消光系数确定的相对污染程度特征(高度角5°)
4 结论
4.1 气溶胶主动遥感监测实验中,大气结构稳定,在3km高度有部分薄云或悬浮气溶胶层.
4.2 受污染排放、传输路径等因素影响,气溶胶空间分布不均匀,而强排放的点污染源的污染物水平传输距离可达4km.
4.3 激光雷达的水平扫描观测可以不受地表类型的影响,获得高空间分辨率的气溶胶分布.
4.4 对消光系数反演结果设置合适的阈值,可用于区域散布污染源的查找及传输路径分析.
4.5 微小的高度角变化可能使远处信号与近处信号的高程相差很多,在进行区域污染监测时,应尽量将观测点设置在区域高点采用水平扫描观测方式,减小高度角的影响.
[1] 张庆阳,张 沅,曹学柱.城市大气污染治理有关研究 [J]. 气象科技, 2001,29(4):6-10.
[2] Chu D A, Kaufman Y J, Zibordi G., et al. Global monitoring of air pollution over land from the Earth Observing System-Terra Moderate Resolution Imaging Spectroradiometer (MODIS) [J]. Journal of Geophysical Research: Atmospheres, 2003,108(D21), 4661:1-18.
[3] Killinger D K, Menyuk N. Laser Remote Sensing of the Atmosphere [J]. Science, 1987,235:37-45.
[4] Pappalardo G, Amodeo A, Amoruso S, et al. One year of tropospheri c lidar measurements of aerosol extinction and backscatter [J]. Annals of Geophysics, 2003,46(2):401-413.
[5] Huang J P, Huang Z W, Bi J R, et al. Micro-Pulse Lidar Measurements of Aerosol Vertical Structure over the Loess Plateau [J]. Atmospheric and Oceanic Science Letters, 2008,1(1): 8-11.
[6] Niranjan K, Madhavan B L, Sreekanth V. Micro pulse lidar observation of high altitude aerosol layers at Visakhapatnam located on the east coast of India [J]. Geophysical Research Letters, 2007,34(3):340-354.
[7] 王珍珠,李 炬,钟志庆,等.激光雷达探测北京城区夏季大气边界层 [J]. 应用光学, 2008,29(1):96-100.
[8] 刘文彬,刘 涛,黄祖照,等.利用偏振-米散射激光雷达研究广州一次浮尘天气过程 [J]. 中国环境科学, 2013,33(10):1751- 1757.
[9] Ansmann A, Wagner F, Althausen D, et al. European pollution outbreaks during ACE 2: Lofted aerosol plumes observed with Raman lidar at the Portuguese coast [J]. Journal of Geophysical Research Atmospheres, 2001,106(D18):20725–20733.
[10] Grund C J, Sandberg S P. Depolarization and Backscatter Lidar for Unattended Operation [M]. Advances in Atmospheric Remote Sensing with Lidar, 1997:3-6.
[11] Eloranta E E. High Spectral Resolution Lidar [M]. New York : Springer, 2006:143-163.
[12] Chudzyński S, Czyżewski A, Ernst K, et al. Multiwavelength lidar for measurements of atmospheric aerosol [J]. Optics & Lasers in Engineering, 2002,37(2/3):91-99.
[13] He T Y, Stani S, Gao F, et al. Tracking of urban aerosols using combined lidar-based remote sensing and ground-based measurements [J]. Atmospheric Measurement Techniques, 2011, 5(5):891-900.
[14] Xie C, Zhao M, Wang B, et al. Study of the scanning lidar on the atmospheric detection [J]. Journal of Quantitative Spectroscopy & Radiative Transfer, 2015,150(150):114-120.
[15] Chen X, Lv Y, Zhang W, et al. Comparison between dust and haze aerosol properties of the 2015spring in Beijing using ground- based sun photometer and lidar [C]. AOPC 2015: Optical and Optoelectronic Sensing and Imaging Technology, SPIE. 2015.
[16] Ramaswamy Tiruchirapalli. Micropulse lidar observations of free tropospheric aerosols over the atmospheric radiation measurement site at Barrow, Alaska [D]. Alaska: University of Alaska Fairbanks, 2006:14-23.
[17] Collis R T H. Lidar: A new atmospheric probe [J]. Quarterly Journal of the Royal Meteorological Society, 1966,92(392):220- 230.
[18] Kovalev V A, Eichinger W E. Elastic Lidar: Theory, Practice, and Analysis Methods [M]. New York: John Wiley & Sons Inc, 2004.
[19] Klett J D. Stable analytical inversion solution for processing lidar returns [J]. Applied Optics, 1981,20(2):211-220.
[20] Weinman J A. Derivation of atmospheric extinction profiles and wind speed over the ocean from a satellite-borne lidar [J]. Applied Optics, 1988,27(19):3994-4001.
[21] Fernald F G. Analysis of atmospheric lidar observations: some comments [J]. Applied optics, 1984,23(5):652.
[22] Nebuloni R. Empirical relationships between extinction coefficient and visibility in fog [J]. Applied Optics, 2005,44(18): 3795-3804.
[23] Hostetler C A, Liu Z, Reagan John, et al. CALIOP Algorithm Theoretical Basis Document: Calibration and Level 1Data Products EB/[OL]. http://ccplot.org/pub/resources/CALIPSO/ CALIOP%20Algorithm%20Theoretical%20Basis%20Document/PC-SCI-202.01%20CALIOP%20Instrument,%20and%20Algorithms%20Overview.pdf, 2012-06-13.
Monitoring the distributed point pollution sources based on a scanning Lidar.
LÜ Yang1,3, LI Zheng-qiang1*, XIE Jian-feng2, ZHANG Feng2, LIU Xiao-qiang2, LIU Zhao1,3, XIE Yi-song1, XU Hua1, CHEN Xing-feng1
(1.State Environmental Protection Key Laboratory of Satellite Remote Sensing, Institute of Remote Sensing and Digital Earth, Chinese Academy of Sciences, Beijing 100101, China;2.Hebei Province Environmental Monitoring Center, Shijiazhuang 050000, China;3.University of Chinese Academy of Sciences, Beijing 100049, China)., 2017,37(11):4078~4084
A horizontal scanning Lidar experiment was performed in Shijiazhuang city, Hebei province, on June 11, 2015, and the location and the transportation of regional pollution sources were determined by using dynamic threshold method. The results showed that the aerosols near the ground are uneven distributed and the pollutants from heavy industrial emission sources can transport as far as 4km. The horizontal scanning scenario can obtain high resolution spatial distribution of near surface aerosols, without affecting by the surface types. Observations at different elevation angles indicated that the observation platform should be placed as high as possible and the scanning should be in horizontal manner. During the extraction of pollution area, the background atmosphere visibility could be used to determine the dynamic threshold of the extinction coefficient, thereby enhancing the extraction of regional pollution characteristics.
Lidar;scanning observation;distributed point pollution source;dynamic threshold
X51
A
1000-6923(2017)11-4078-07
吕 阳(1984-),女,山东烟台人, 助理研究员,硕士,主要从事激光雷达大气遥感研究.发表论文16篇.
2017-03-31
中国科学院科技服务网络计划(STS)区域重点资助项目(KFJ-STS-QYZD-022);国家自然科学基金资助项目(41671367);河北省科技计划资助项目(15273909)
* 责任作者, 研究员, lizq@radi.ac.cn
猜你喜欢
北京测绘(2022年5期)2022-11-22
成都信息工程大学学报(2022年3期)2022-07-21
地球科学与环境学报(2021年6期)2021-11-16
汽车观察(2021年8期)2021-09-01
现代农村科技(2021年2期)2021-03-15
装备环境工程(2019年6期)2019-07-16
绿色科技(2019年12期)2019-07-15
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
科技视界(2016年19期)2017-05-18