定位同步系统
2017-11-22 07:41:56夏博光王凡刘正毅张二永
中国铁路 2017年10期
夏博光,王凡,刘正毅,张二永
(中国铁道科学研究院基础设施检测研究所,北京100081)
定位同步系统
夏博光,王凡,刘正毅,张二永
(中国铁道科学研究院基础设施检测研究所,北京100081)
针对现有定位技术定位信息精度不高、设备占用空间较大等问题,设计了一种基于GNSS和射频识别技术辅助列车定位的小型化定位同步系统新方案。采用GNSS和射频识别技术,通过将铁路及城市轨道交通里程信息与经纬度、电子标签号码建立一一对应关系,实现检测车的里程定位。对小型化定位同步系统进行试验,验证系统具有可行性,可为铁路及城市轨道交通检测车运行中小型化、便携化精确定位提供较为有效的解决方案。
里程定位;小型化;定位同步系统;GNSS;射频识别技术;GPS;检测车
1 定位系统发展现状
截至2016年底,我国铁路运营里程已达12.4万km,其中高速铁路超过2.2万km。2016年,国家铁路共完成旅客发送量27.70亿人次。2017年,全国铁路预计投产新线2100km、复线2500km、电气化铁路4000km;预计完成旅客发送量30.25亿人次。
截至2016年底,我国内地已有29座城市拥有129条城市轨道交通运营线路,总长3832km。预计到2017年末,约有1000km的新线建成运营,总运营里程将达到5000km;新增运营城市5座,届时运营城市总数将达34座[1]。
我国铁路和城市轨道交通的不断发展为人们日常出行提供极大便利的同时,其运营安全也面临着更加严峻的考验。如何保障铁路及城市轨道交通运营的平稳、安全、高效,是铁路及城市轨道交通运营和养护部门日常工作的重中之重。运营所依靠的轨道、供电、通信、信号等基础设施的稳定性及安全性,是保障运营安全的基本要素。如何高效、准确地查找、定位、消除病害,成为运营和养护部门日益关注的问题。其中,准确定位病害、提高查找及消除病害的效率成为解决上述问题的关键。随着科技发展及硬件设备的不断更新,大型动态检测设备搭载在检测车等速检测已经逐步替代了原有的人工检测,提高工作效率的同时,也能保障养护部门工作人员的人身安全。检测车检测线路病害不受时间、天气、温度等外界自然因素的影响,但由于检测速度快,要保证定位信息的准确性,需要采用更为准确和高效的定位方法。
目前,世界各国使用较为广泛的列车定位方法包括基于速度编码器的里程累加、测速、应答器、卫星系统及无线射频识别等,但各种定位方法均存在一定的局限性(见表1)。
使用单一方法进行列车定位无法满足定位的准确性要求,只有将多种定位方法有机结合,共同使用,才能提高定位精度,保证定位的准确性。研究适合于我国铁路及城市轨道交通检测需要的定位同步系统,提高定位精度,保证定位准确性,从而提高查找、定位、消除病害的效率,是十分必要的。
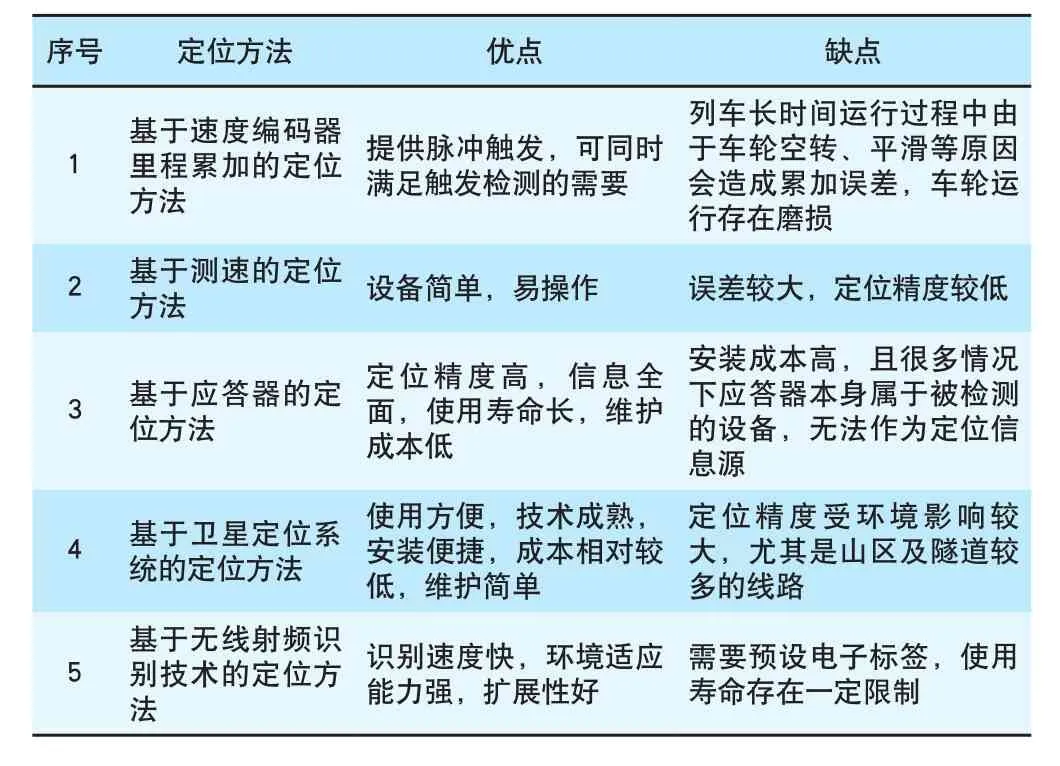
表1 各种定位方法的优缺点比较[2-5]
通过对各线路基础设施检测系统在统一里程坐标下采集的检测大数据进行对比分析,将为更深层次的数据分析以及挖掘基础设施状态变化规律、预测状态恶化趋势等研究提供坚实基础。但我国铁路及城市轨道交通正处于高速发展阶段,专用检测车数量有限,同时为保证日常运营的需要,检测车的检测频次受到限制,无法采集足够的检测数据,研究适合在既有运营旅客列车上安装的小型化定位系统,进行搭载式日常检测,获得更为庞大的检测数据,也成为迫切需要解决的实际问题。
2 系统方案选择
我国铁路单节检测车的里程校对方式主要有2种,人工修正里程和通过GPS自动修正里程,城市轨道交通主要使用人工修正里程方式[2]。近几年,在高速综合检测列车中,也有应用机车LKJ信号和射频识别技术进行里程修正的。
人工修正里程靠人工在瞭望窗口进行里程观察,在检测车运行到特定里程处通过里程修正小键盘进行里程修正。人工修正里程存在以下问题:(1)列车速度过快造成操作人员无法看清公里牌、对里程修正过早或过迟;(2)天气对操作人员视线的影响,如夜间、雾、雨、雪、风等天气,此外城市轨道交通多以隧道为主,空间狭小,视线受外界光线影响,无法准确识别公里牌信息;(3)人工修正增加了检测人员的工作负担。
GPS里程自动校对系统利用GPS的定位功能,将GPS接收系统实时输出的数据(包括经度、纬度、方向角等参数)和数据库中已有的里程数据进行匹配,在特定经纬度匹配对应的里程值时,将里程值输出到检测系统,对系统进行里程自动修正。GPS实现方式有以下优点:(1)简单且快速,只需要在车顶安装GPS信号接收天线;(2)灵活性强,线路改变时,可快速对里程数据库进行更改。但是,由于GPS接收器受环境影响较大,在隧道、山谷等遮挡卫星信号接收的地方,GPS里程自动校对系统将无法工作。我国幅员辽阔且地形复杂,隧道、山谷等较为普遍,影响GPS的正常使用。城市轨道交通多以地下隧道为主,无法使用GPS进行定位[2]。
应用机车LKJ信号进行里程修正的方法在实际应用中经常出现由于误码导致里程值修正错误的现象,而且这种方法必须开放机车信号,在轨检车、探伤车和城市轨道交通检测车中无法应用。
随着芯片技术及硬件设备的不断发展,射频识别技术的应用也趋于成熟,已广泛应用于各个领域。射频识别技术采用无线通信方式,不受地理环境的影响,克服了GPS定位系统受山谷、隧道等非露天环境影响的问题;同时,采用射频识别技术只需在需要识别的线路特征点处预设电子标签进行定位,克服了小键盘修正里程受天气及光线影响、修正信息误差较大的问题。目前射频识别技术已在我国高速综合检测列车的精确定位中得到了较为成熟的应用。
同时,为了满足数据采集、处理及同步的需要,现有的检测车定位系统需要3~4台采集处理设备,占用机柜高度至少8U(1U=4.445cm),所需空间较大。
考虑到射频识别技术在环境适应性、抗干扰能力及定位精度方面的优越性,定位同步系统采用光电编码器进行里程的累加计算,同时通过卫星定位系统(城市轨道交通不使用)、射频识别技术及人工修正的方法进行里程修正,对原有定位系统进行集成化改造,可以满足小型化定位同步系统实现精确定位的需要。
3 系统设计
定位同步系统主要包括全球导航卫星系统(Global Navigation Satellite System,GNSS)模块(国有铁路检测中使用)、射频识别模块、光电编码器模块及数据采集处理模块等。
3.1 GNSS模块
GNSS模块选择可接收中国北斗及美国GPS定位系统信号的接收板卡,天线选择可接收7频段信号的小型化天线。其中,天线安装在所搭载的检测车车顶(临时状态下,可考虑放置在车内车窗处),接收板卡安装于车内。首先将检测车所检测的线路中每隔一段距离的经纬度信息与线路的实际里程信息一一对应,并形成记录文件,检测车运行过程中实时更新位置信息,将实时的位置信息与记录文件中的数据进行比对,当实时经纬度信息与记录文件中的数据一致时,读取该经纬度信息对应的实际里程信息,修正编码器的累加里程信息,并实时发送至其他检测系统,同步完成里程修正。
3.2 射频识别模块
射频识别模块选择高速工业级电子标签及电子标签阅读器。为了兼容高速铁路和城市轨道交通,选择可满足400km/h情况下正常识别要求的电子标签作为定位信息修正源,电子标签的载频为2.45GHz(频段应用广泛且不需要许可),通信不会受到发动机点火或其他线路电子设备产生的电磁波的干扰。
每一个电子标签中包含全球唯一的识别码,在标签安装过程中形成数据库文件,记录每一个标签号码对应的线路特征信息(包括里程、行别、线路特征点等),当检测车检测过程中通过电子标签时,安装在车上的阅读器读取标签信息并识别标签号码,将该号码与车内的数据库信息进行比对,识别标签对应的线路特征信息,修正定位系统编码器累加的里程信息,并将修正信息发送至其他检测系统修正里程信息。
由于线路周边环境不同,电子标签的安装方式也不相同。在国有电气化铁路旁设置有接触网支柱时,阅读器安装于检测车车窗内,电子标签安装于接触网支柱上,安装高度根据阅读器的安装高度确定(为了便于信息共享,电子标签安装高度统一为距离轨面2.2m);在非电气化铁路及城市轨道交通线路旁无接触网支柱时,阅读器安装于检测车底部中心线沿线,电子标签安装在线路中心(见图1、图2)[6]。
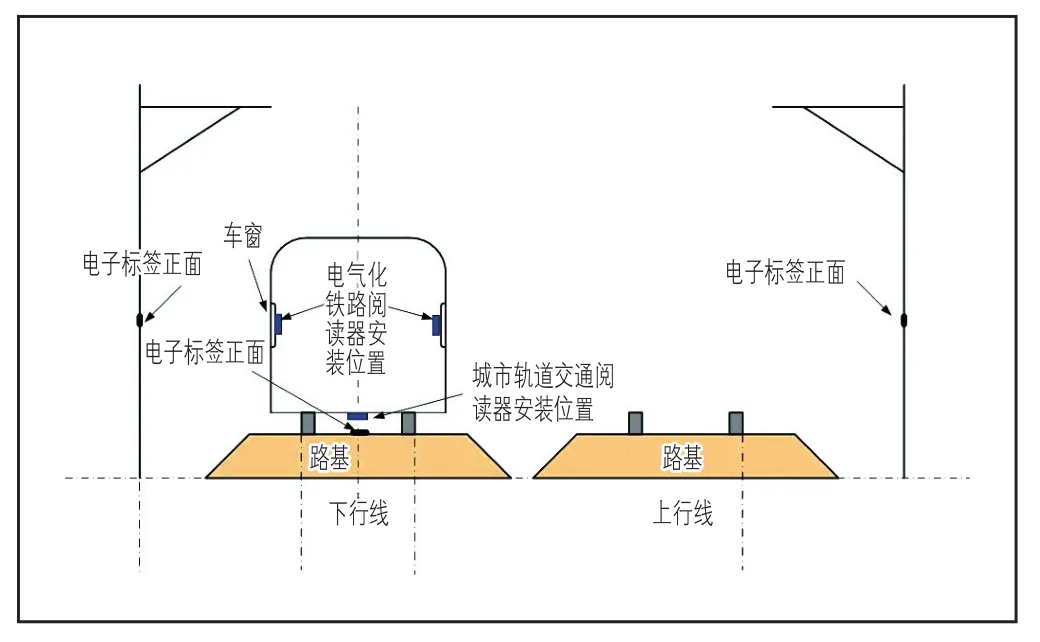
图1 阅读器及电子标签安装位置示意图
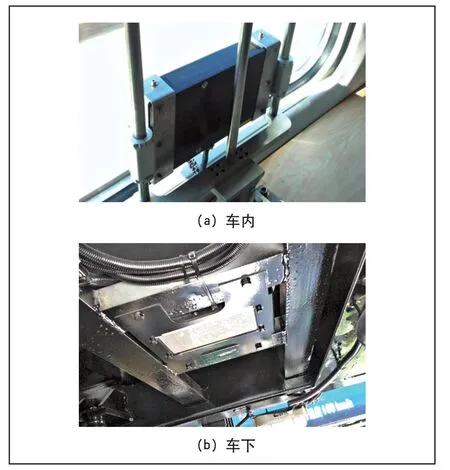
图2 阅读器车内、车下安装实物图
3.3 光电编码器模块
光电编码器安装于检测车轴端,与轮对以相同角速度转动,在已知轮对直径的情况下,通过计算即可得到实时车速及检测车的实时里程。检测车使用脉冲数为5000的光电编码器。考虑到车内其他检测系统通过脉冲完成传感器采样触发的需要,设计高度为1U的机架式脉冲信号分配单元(见图3),将1路编码器脉冲信号分成7路进行广播传输。若检测车内检测系统所需脉冲信号多于7路,可通过光纤级联信号分配单元,满足车内所有检测系统脉冲信号的需求。
3.4 数据采集处理模块
基于对未来检测系统设备小型化及轻量化的考虑,通过对原有定位系统的优化,将信号采集、数据处理及里程信息发布等功能模块进行一体化设计,集成在一个定位同步服务器机箱内,机箱高度为3U,适合安装于标准机柜中。数据采集处理模块方案见图4。

图3 信号分配单元
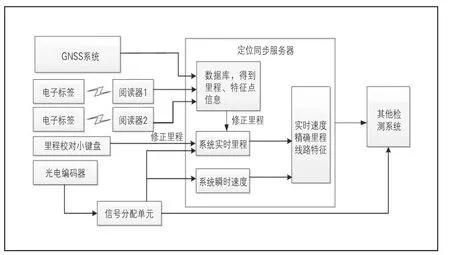
图4 数据采集处理模块方案
3.5 小结
定位同步服务器通过接收光电编码器脉冲信号计算实时车速并累加里程,然后将实时车速及里程信息通过广播方式发送至检测车内其他检测系统。
定位同步系统实时接收GNSS卫星定位系统信号,并将接收的信号与系统数据库信息进行比对,当经纬度信息与数据库中的数据吻合时,提取对应线路特征信息,通过误差修正算法修正误差后得到准确的里程信息,修正定位同步系统的实时里程信息,并将里程信息发布至检测车内其他检测系统。
同理,定位同步系统在接收到电子标签的信号后,将标签的号码信息与数据库中的数据进行比对,得到里程信息及线路特征值,通过误差修正算法修正误差后得到准确的里程信息,修正定位系统的实时里程信息并将里程信息发布至检测车内其他检测系统。
同时,系统实时监测小键盘信号输入,当检测人员通过小键盘输入里程修正信息时,获取小键盘信息修正定位同步系统的实时里程信息并发布至其他检测系统。
里程修正信息发布主要通过光纤或电缆的方式进行多点实时传输,并根据需要通过光纤串联通信设备,提高通信速度的同时,有效避免外界复杂电磁环境的干扰,可以同时满足所有检测系统接收定位信息的需求。
4 系统试验验证
为了验证使用电子标签进行里程定位、列车定位,将定位同步系统安装在检测车上,在北京东郊国家铁道试验中心对定位的准确性及重复性进行试验验证。在环行铁道试验线沿线公里标0km和1km附近的接触网支柱上分别安装电子标签,作为里程修正点。
试验过程中,检测车分别以80km/h、100km/h、120km/h、140km/h匀速通过电子标签安装区段,通过安装于车内的阅读器读取电子标签的标签信息,并将信息传输至定位同步系统服务器,定位同步系统服务器将标签信息与数据库进行对比,得到电子标签所在位置的里程信息,完成对检测车运行实际里程的修正。其中,检测车通过公里标0km电子标签时,修正检测系统里程值为0km,作为每一次检测的起始。检测车通过公里标1km附近电子标签时,系统采集标签信息并记录下修正前的实时里程信息,验证电子标签辅助进行里程信息修正的稳定性。
试验过程中,定位同步系统分别记录检测车经过公里标1km附近电子标签处修正前的实时里程值,并将该里程记录信息的平均值作为该标签的实际里程(见表2)。从表2的数据记录可以看出,将检测车以不同运行速度通过1km公里标附近电子标签时记录下的修正前的里程值取平均值作为该电子标签的实际里程值,该电子标签的实际安装位置可近似认为是0.977037km。通过对表2的里程数据进行分析可以看出,定位同步系统在重复验证中保持了较高的定位重复性,每次的修正值可保证在±0.3%的误差范围内,满足检测车检测过程中定位精度的要求。
5 结束语
通过对现有定位技术的研究和分析,提出一种基于GNSS及射频识别技术辅助列车定位的小型化定位同步系统新方案。小型化定位同步系统是对现有定位技术进行的改进和创新,是针对现有定位技术定位精度不高、设备占用空间大等问题,对定位精度及集成度的补充和提高。对小型化定位同步系统新方案在实际线路上进行试验验证,验证结果显示,系统设计方案在实际应用中可行,可满足里程精确定位的需求。
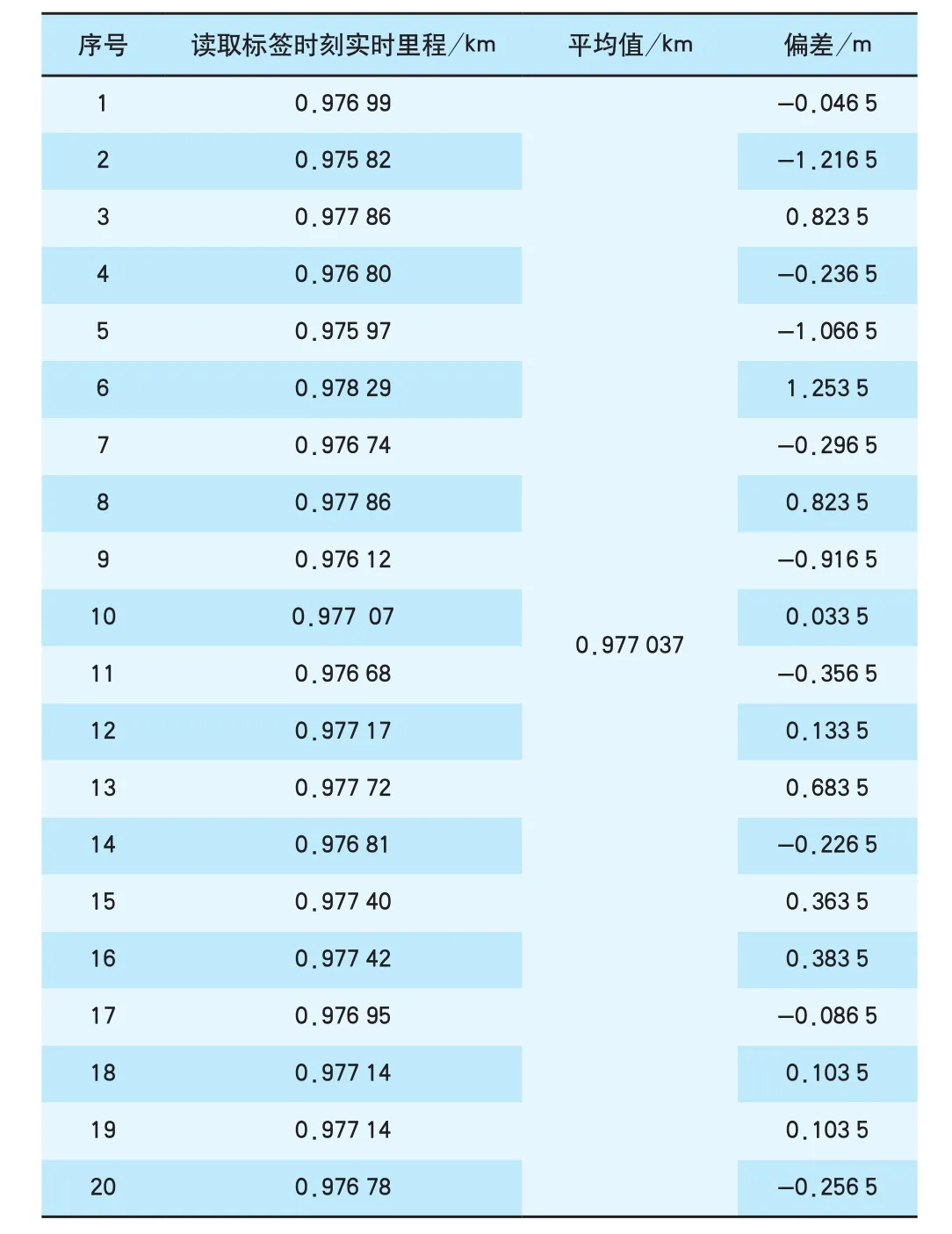
表2 里程记录表
[1]刘宇,樊佳慧,贺力霞,等.2016年中国城市轨道 交通运营线路统计与分析[J].都市快轨交通, 2017(2):4-6.
[2]杨超.综合检测列车定位同步技术研究[D].北 京:中国铁道科学研究院,2009.
[3]夏博光,王卫东,王登阳.无线射频(RFID)技 术在高速检测列车精确定位中的应用[J].铁道建 筑,2011(11):102-106.
[4]王登阳,杨超.高速综合检测列车时空同步技术[J]. 铁路技术创新,2012(1):16-19.
[5]邢红霞,王剑,严细辉,等.数据融合在列车 定位系统中的应用研究[J].中国铁路,2014(1): 66-69.
[6]彭丽宇,王登阳,张俊生.朔黄铁路综合检测列 车定位同步技术研究[J].铁道建筑,2017(2): 129-132.
Positioning Synchronization System
XIA Boguang,WANG Fan,LIU Zhengyi,ZHANG Eryong
(Infrastructure Inspection Research Institute,China Academy of Railway Sciences,Beijing 100081,China)
The design of miniaturized positioning synchronization system was proposed in this paper based on the adoption of GNSS and radio frequency identification technology which assist train positioning. By GNSS and radio frequency identification technology, mileage positioning of testing vehicle is carried out by establishing the one-to-one correspondence among the mileage information of railway amp; urban transport, the longitude amp; latitude and the electronic tag number. Experiments were carried out on the miniaturized positioning synchronization system to prove its applicability. The system provides an effective solution to the miniaturized and portable precise positioning for testing vehicle operation in railway and urban transit industry.
mileage positioning;miniaturization;positioning synchronization system;GNSS;radio frequency identification technology;GPS;testing vehicle
U216.3
A
1001-683X(2017)10-0086-05
10.19549/j.issn.1001-683x.2017.10.086
中国铁道科学研究院科技研究开发计划项目(2015YJ093)
夏博光(1984—),男,助理研究员,硕士。E-mail:xbg1984@rails.cn
2017-07-24
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:10:12
大众标准化(2022年10期)2022-02-06 12:25:03
铁道建筑(2020年8期)2020-09-04 06:08:42
减速顶与调速技术(2018年1期)2018-11-13 01:09:30
车迷(2017年12期)2018-01-18 02:16:12
中国交通信息化(2017年8期)2017-06-06 07:16:42
中国宝玉石(2017年2期)2017-05-25 00:37:11
电子测试(2017年23期)2017-04-04 05:06:44
中国宝玉石(2017年1期)2017-03-24 09:19:42
读写算(上)(2015年6期)2015-11-07 07:18:00