
Non-fragile switched H∞control for morphing aircraft with asynchronous switching
2017-11-20 01:56HoyuCHENGChoyngDONGWeiliJIANGQingWANGYnzeHOU
CHINESE JOURNAL OF AERONAUTICS 2017年3期
Hoyu CHENG,Choyng DONG,*,Weili JIANG,Qing WANG,Ynze HOU
aSchool of Aeronautic Science and Engineering,Beihang University,Beijing 100083,China
bCollege of Electrical and Information Engineering,Hunan University,Changsha 410082,China
cSchool of Automation Science and Electrical Engineering,Beihang University,Beijing 100083,China
dInstitute of Manned Space System Engineering,Beijing 100094,China
Non-fragile switchedH∞control for morphing aircraft with asynchronous switching
Haoyu CHENGa,Chaoyang DONGa,*,Weilai JIANGb,Qing WANGc,Yanze HOUd
aSchool of Aeronautic Science and Engineering,Beihang University,Beijing 100083,China
bCollege of Electrical and Information Engineering,Hunan University,Changsha 410082,China
cSchool of Automation Science and Electrical Engineering,Beihang University,Beijing 100083,China
dInstitute of Manned Space System Engineering,Beijing 100094,China
Available online 15 February 2017
*Corresponding author.
E-mail address:dongchaoyang@buaa.edu.cn(C.DONG).
Peer review under responsibility of Editorial Committee of CJA.
Production and hosting by Elsevier
http://dx.doi.org/10.1016/j.cja.2017.01.008
1000-9361©2017 Chinese Society of Aeronautics and Astronautics.Production and hosting by Elsevier Ltd.
This is an open access article under the CC BY-NC-ND license(http://creativecommons.org/licenses/by-nc-nd/4.0/).
This paper deals with the problem of non-fragile linear parameter-varying(LPV)H∞control for morphing aircraft with asynchronous switching.The switched LPV model of morphing aircraft is established by Jacobian linearization approach according to the nonlinear model.The data missing is taken into account in the link from sensors to controllers and the link from controllers to actuators,which satisfies Bernoulli distribution.The non-fragile switched LPV controllers are constructed with consideration of the uncertainties of controllers and asynchronous switching phenomenon.The parameter-dependent Lyapunov functional method and mode-dependent average dwell time(MDADT)method are combined to guarantee the stability and prescribed performance of the system.The sufficient conditions on the solvability of the problem are derived in the form of linear matrix inequalities(LMI).In order to achieve higher efficiency of the designing process,an algorithm is applied to divide the whole set into subsets automatically.Simulation results are provided to verify the effectiveness and superiority of the method in the paper.
©2017 Chinese Society of Aeronautics and Astronautics.Production and hosting by Elsevier Ltd.This is an open access article under the CC BY-NC-ND license(http://creativecommons.org/licenses/by-nc-nd/4.0/).
Asynchronous switching;
Data missing;
Morphing aircraft;
Non-fragileH∞control;
Switched linear parametervarying system
1.Introduction
The morphing aircraft1,2can alter its external shape automatically,which ensures that the aircraft can achieve optimal flight performance and adapt to multiple flight environments during the flight process.Compared to traditional aircraft,the morphing aircraft can obtain a wider range of aerodynamic characteristics.However,the transformations of configuration will no doubt make the morphing aircraft a complicated system with dramatic parameter variations and strong nonlinearity.Therefore,designing an effective control method to guarantee the stability and performance during the transition is supposed to be an encouraging and interesting problem.3,4The problem of controller design for morphing aircraft has attracted great research attention.5,6
Switched linear parameter-varying (LPV) control theory7–10has emerged as an effective technique to deal with the problem with strong nonlinearity and large parameter variation range,which has been widely investigated and applied to chemical processes,robotic systems and aerospace industry.11–13In Ref.7,the asymptotic stability of LPV systems with piecewise constant parameters is investigated.The timedependent state-feedback controllers are designed to guarantee the robust stability of the system.The authors design a statefeedback controller for parameter uncertain system in Ref.14and the stabilization conditions are given in terms of parameterized linear matrix inequalities(LMI).Moreover,the LPV controllers are constructed and applied to F-16 aircraft and near space hypersonic vehicle in Refs.12,13An implicit assumption in these researches is that the controllers can be implemented exactly.However,in practice,there always exist parameter uncertainties in the controllers due to inherent and unavoidable imprecision,which have considerable impact on the performance and stabilization of the system.The performance will be no doubt degraded by a relatively small perturbation of the controller parameters.15–17It is important to design controllers which are insensitive to uncertainties.Therefore,the non-fragile control theory is proposed in Refs.18–20to overcome the undesirable effect caused by uncertainties of the controllers.
On the other hand,the data missing in the system will cause the problem of asynchronous switching.21There exist updating lags between the modes of the aircraft and the modes of controllers,which will lead to the existence of matched periods and unmatched periods.Meanwhile,the system energy will increase during the unmatched periods.Considerable attentions have been paid to the problem during past decades and many valuable results have been obtained.22–25In Ref.,24the asynchronously switched control theory with average dwell time(ADT)is investigated.The stability results for both continuous-time and discrete-time systems are given in the form of LMI.Considering inherent data missing in the system,Li and Yang25propose the asynchronous fault detection filter design approach for switched system.Although the researches above are very encouraging,there still exist some extensions to be learned.Most literatures mentioned above guarantee the stability of the system by the aid of ADT method.However,the ADT is obtained by mode-independent parameters,which are the increase coefficients of Lyapunov-like functions at switching instants and the increase/decay rate of Lyapunovlike functions during each subsystem.Since the properties of each subsystem may be different,the introduction of common parameters for all subsystems will give rise to certain conservativeness.Therefore,the investigation on mode-dependent average dwell time(MDADT)is significant and worthwhile.26–28What’s more,it is noted that the methods proposed in the papers above may lack an efficient way to divide the set of scheduling parameter into subsets.The division of the parameter may depend on the experience of designers,which will make designing a laborious process.In order to improve the efficiency of the process,the systematic design methods are proposed in Refs.29,30The results are applied to hard disk drives and gain-scheduling controllers.However,to the best of authors’knowledge,the non-fragileH∞control for morphing aircraft with asynchronous switching in MDADT switching framework remains an open problem.It is necessary to find an efficient controller design method for morphing aircraft,which can overcome the influences of external disturbance,asynchronous switching phenomenon and uncertainties of controllers.
Motivated by the researches above,the paper presents a systematic method of non-fragileH∞control for morphing aircraft with asynchronous switching.Based on the switched LPV model of aircraft,the non-fragile controller is proposed with consideration of parameter uncertainties of the controller and asynchronous switching.The objective is to reduce the undesired influences caused by external disturbance,asynchronous switching and controller uncertainties.A systemic design method is developed and the solutions of the controllers are formulated in the form of LMI by combining Lyapunov functional method and MDADT method.The main contributions of the paper are as follows.First,the MDADT method is developed to analyze the asynchronous switching phenomenon by making full use of properties of each subsystem.Compared to the traditional ADT method,the less conservative results can be achieved.Second,the non-fragileH∞control method is introduced to overcome the influence of uncertainties of controller.Third,in order to achieve higher efficiency and avoid blindness of parameter set partition,an automatic partition method for scheduling parameter is applied to the design of controller.
2.Model description
The switched LPV system studied in the paper is given by
wherex(k)∈ Rnx,y(k)∈ Rnyandu(k)∈ Rnudenote the state vector,output signal and control input;d(k)∈ Rndis the unknown external disturbance,which belongs toL2[0,∞);are the system matrices with appropriate dimensions,which are the functions of the scheduling parameter ξk;iis the switching signal and takes value in the finite set Ω = {1,2,...,n},wherenis the total number of subsets.It is supposed that the scheduling parameter varies in the setand the set is divided into a finite number of subsets,which can be expressed as follows:
The state feedback controller for switched LPV system is established as follows:
In practice,there always exists data missing in the channels due to the limited source of network.Therefore,the measured output signal can be described as
Meanwhile,the data missing in the channel from controller to actuator can be described as where θ(k)and δ(k)are Bernoulli distributed white sequences and take value of 0 and 1.The probability of data missing is defined as ρ and λ,which satisfy the following mathematical expectation values:
Without loss generality,we introduce the following assumption to ensure the stability and controllability of the system.31
Assumption 1.There exist packet dropouts in the links from sensors to controllers and from controllers to actuators.We set the maximum allowable packet dropout bounds as¯d1and¯d2,and the maximum packet dropout rates as¯ρ and¯λ.
For the actual implement,there exist uncertainties of controllers in the system.So we consider the problem of nonfragile controller design in the paper.The controllers are given as
Owing to the fact that the packet dropouts will lead to updating lags between the mode of controller and the mode of system,there always exists asynchronous switching in the system.It is supposed that theith subsystem is activated atki,and the corresponding controller is activated atki+Δi.Thus,there exist matched intervals and unmatched intervals between the controller mode and the system mode(see Fig.1).So the Lyapunov-like functions will increase with bounded rates during the unmatched periods.
Based on the statement above,the closed-loop system considering asynchronous switching can be obtained in Eq.(11).
Then,the problem of non-fragileH∞controller with asynchronous switching can be described as follows:
(1)The closed-loop system in Eq.(11)is globally uniformly asymptotically stable(GUAS)whend(k)=0.
(2)Given scalars γw> 0 and 0 < aw< 1,the system in Eq.(11)has weightedL2-gain satisfying Eq.(12)under zero initial conditions for all non-zerod(k)∈ L2[0,∞).
3.Main results
3.1.Non-fragile controller design
The sufficient existing conditions and solutions of the controller will be derived in this section.The definition and lemmas are presented as follows for the convenience of the proof.
Definition 1.28Fora given switching signal σ(k) and 0 ≤k1≤k2,defineNσi(k1,k2)as the activated number of the ith subsystem during the time interval[k1,k2],andGi(k1,k2)as the running time of the ith subsystem during the interval[k1,k2],wherei∈ Ω.If there exist positive scalarsN0iand τai,such that
thenN0iis defined as the mode-dependent chattering bounds and τaithe mode-dependent average dwell time.
Lemma 1.Consider the switched LPV system x(k+1)=fi(x(k),ξk)and constant scalars0 <ai< 1,bi> 0, μ1i≥ 1,μ2i≥ 1.Suppose that there exist Lyapunov-like functions Vi(k)and classκ∞functionsκ1iand κ2i(i,j∈ Ω,i≠j),such that
then the system in Eq.(11)is GUAS with any switching signal satisfying MDADT in Eq.(17).
Proof.Define the Lyapunov-like functions as follows:
wherePj(ξk)is a positive matrice with appropriate dimensions.
Define~aj=1-aj,~bj=1+bjand¯hj=j/j,and one can obtain Eq.(19)from Eq.(15).
Thus,fork≥kj+Δj,Eq.(20)can be derived by iteration operation on Eq.(19).
Then one can obtain relationship of Lyapunov-like functions during the matched intervals,which can be expressed in Eq.(21).
Similarly,during the unmatched interval,choosing the Lyapunov-like functions as follows:
wherePij(ξk) isa positive matrices with appropriate dimensions.
We can obtain Eq.(23)from Eq.(15).
Eq.(24)can be deduced by iteration operation on Eq.(23).
Therefore,one has Eq.(25)during the unmatched interval.
Thus,for anyk≥kj+Δj,according to Eqs.(15),(16),(21)and(25),one has
Then one can obtain the sufficient condition to guarantee the system GUAS.
It is easy to obtain that Eq.(26)is equivalent to Eq.(17).We can know that the Lyapunov-like functions of the systemVσ(k)(k)converge to zero whenk→ ∞.Based on the statement above,the asymptotic stability of the system is guaranteed by the aid of Eq.(14),which completes the proof.□
Remark 1.Since the properties of each subsystem may be different,the method of introducing the same ADT for all subsystems will be more conservative than that of MDADT.The coefficients μ1iand μ2iare used to describe the change of Lyapunov-like function at switching instants of the subsystem and the sub-controller,andaiandbiare introduced to describe the decay rate and increase rate of Lyapunov-like function in each subsystems.Compared to the results of ADT,it can be suggested that the ADT is a special case of MDADT by setting
Lemma 2.Consider the switched LPV system in Eq.(11)and constant scalars0<ai<1,bi>0, μ1i≥1, μ2i≥1and
γ> 0.If there exist Lyapunov-like functions Vi(k),such that Eqs.(16)and(27)hold,then the system is GUAS for any switching signal with MDADT satisfying Eq.(17),and has weighted performance cost in Eq.(12).
where φ(k)=yT(k)y(k)- γ2dT(k)d(k); γwandawin Eq.(12)
Proof.Consider the Lyapunov-like functions in Eq.(18),and one has
Notice thatNσj(k0,s)≤N0j+Gj(k0,s)/τajandOne can obtain Eq.(31)from Eqs.(30)and(17).
Furthermore,consider the factVσ(k)(k)≥ 0 and zero-initial conditionVσ(k0)(k0)=0,and one can obtain that
Then we can obtain Eq.(30)by multiplying both sides of Eq.(29)by
Define γw=and theH∞performance in Eq.(12)is satisfied.Thus,one can obtain Lemma 2,which completes the proof.□
Lemma 3.32For given symmetric matrix Y and matrices M and N,if there exists a scalarεsuch that
then we can obtain Y+MTFN+NTFTM<0for all F satisfying FTF<I.
Theorem 1.Consider the switched LPV system in Eq.(11)and scalars 0 <ai< 1,bi> 0,μ1i> 1,μ2i> 1,γ> 0.If there exist matricesPi(ξk)> 0 andPij(ξk)> 0,such that for∀i,j∈ Ω,i≠j,Eqs.(38)–(41)hold,then the system Eq.(11)with any switching signal satisfying Eq.(17)is GUAS whend(k)=0 and has the weightedl2-gain performance index in Eq.(12)for any nonzerod(k)∈L2[0,∞)under zero initial conditions,where
Proof.The proof is divided into two parts to make the statement clear.
(1)The switched LPV system in Eq.(11)is GUAS whend(k)=0.
The parameter-dependent Lyapunov-like functions of the system are defined in Eq.(18).
It is noticed that for any non-zerox(k),one can obtain that
Combining the conditions in Eqs.(38)and(39),one can obtain that the switched LPV system in Eq.(11)is GUAS whend(k)=0 according to Lemma 1.
(2)For any nonzerod(k)∈ L2[0,∞)and zero-initial condition,we define Λ(k)=obtain that
It is obvious that Eqs.(40)and(41)imply thatZii(ξk)< 0,Zij(ξk)< 0.Thus,one can conclude that
according to Lemma 2,which completes the proof.□
Remark 2.The sufficient existing conditions of the controller are given in Theorem 1.And the solutions of the controller parameters will be obtained in Theorem 2.
Theorem 2.Consider the switched LPV system in Eq.(11)and let 0 <ai< 1,bi> 0,μ1i> 1,μ2i> 1 and γ> 0 be given constant scalars.If there exist matricesSj(ξk)> 0,Sij(ξk)> 0 and(ξk),such that for∀i,j∈ Ω,i≠j,Eqs.(46)–(49)hold,then there exist a set of non-fragile parameter-dependent controllers in Eq.(4)such that the system in Eq.(11)is GUAS whend(k)=0 and has weighted performance cost in Eq.(12)for switching signal with mode-dependent average dwell time satisfying Eq.(17).The parameters of the controllers are given by Eq.(50).
Consider the uncertainties of the controller in Eq.(9)and define(ξk)=i(ξk)Si(ξk),and it is obvious thatii<0 is equivalent to Eq.(52).
Therefore,one can obtain Eq.(48)by Schur complement.Further,Eqs.(46)and(47)ensure the conditions Eqs.(38)and(39)in Theorem 2.Meanwhile,the parameters of the non-fragile controllers are derived by Eq.(50)from the definition of¯Ui(ξk).
Similarly,performing a congruence transformation to Eq.(41)by diag(Sij(ξk),Sij(ξk),I,I,Sj(ξk),I),one can derive Eq.(49)from Eq.(41)via Schur complement and Lemma 3,which completes the proof.□
Corollary 1.Consider the switched LPV system in Eq.(11)and let0 <ai< 1,bi> 0,μ1i> 1,μ2i> 1andγ> 0be given constant scalars.The suboptimal robust H∞controllers for the system with mode-dependent average dwell time satisfying Eq.(17)can be designed by solving the convex optimization problem in Eq.(54)and the parameters of the controllers can be obtained from Eq.(50).
3.2.Automatic partition method of parameter set
Based on the statement above,we can obtain the controller design approach to overcome the undesirable response caused by exogenous disturbance,parameter uncertainties and asynchronous switching.Furthermore,the controllers are designed for the predetermined subsets.The partition method of scheduling parameter will influence the performance of the system and the inapplicable partition method will lead to performance degradation.However,in most literatures,the set of scheduling parameter is divided into subsets by trial and error.
This partition method of parameter set depends on the experience and will no doubt increase the complexity of the design,which makes the design a laborious process.Therefore,in order to achieve higher efficiency,an automatic partition method of parameter set will be proposed in the paper.
Firstly,the predefined performance γ0is supposed to vary in a finite set
where γmaxis the maximalH∞performance that can be obtained and γmincorresponds to the minimalH∞performance.Furthermore,γmincan be calculated by Eq.(56).
where γeis supposed to be the performance when ξk= ξe,in which ξecan be any fixed value within the parameter set.Meanwhile,γmaxis defined as the performance obtained by common Lyapunov functional method.That is to say,we can get γminwhen the set of parameter is divided into an infinite number of subsets;one can get γmaxwhen there is no subset.Furthermore,it is supposed that theith subset is characterized by the lower bound of theith subsetℑiand the width of the corresponding subset ϖi.Thus,the algorithm of automatic partition method can be summarized as follows.
Step 1.The predefinedH∞performance is set to be γ0.
Step 2.Definei=1.Thus,it can be inferred that the undivided subset ℑund= ℑ,and the divided subset ℑd= Ø.
Step 3.For theith subset ℑi(ℑi,ϖi)in the set ℑund.After the lower bound of the subset is decided,one can obtain the width of the subset and the matricesPi(ξk),Si(ξk)and(ξk)by solving the optimization problem as follows:
Step 4.Update the undivided subsets and divided subsets based on step 3.The subsets of the system can be rewritten as
Step 5.If ℑd= ℑ,the automatic partition method is terminated.Otherwise,we should reseti=i+1 and back to the Step 3.
4.Application to morphing aircraft
4.1.Model construction for morphing aircraft
In this section,the application of morphing aircraft is investigated.The aircraft considered in the paper is the Teledyne Ryan BQM-34 ‘Firebee”.The wing sweep angle of the aircraft χ can vary from 15°to 60°,which correspond to the cruise configuration and dash configuration.We define ξk= χk- χ0/χ0as the variation rate of the wing sweep angle at time instantk,where χ0=15 is set to be the minimum wing sweep angle of the aircraft.Thus,it is obvious that ξk∈ [0,3].
The longitudinal short-period model of the morphing aircraft can be expressed as33
wheremT,mwandmaare the mass of the aircraft,wing and counterweight;α,θ andqare the angle of attack,flight path angle and rate of pitch angle;VT,gand¯qare the velocity,acceleration of gravity and dynamic pressure;Jpitch,Sandcare the inertia ofy-axis,wing area and mean aerodynamic chord;xwandxaare the position of the mass center of the wing and the position of the mass center of the counterweight;CLandCmare the coefficients of aerodynamic force and the coefficients of the aerodynamic moment,which can be expressed as follows:
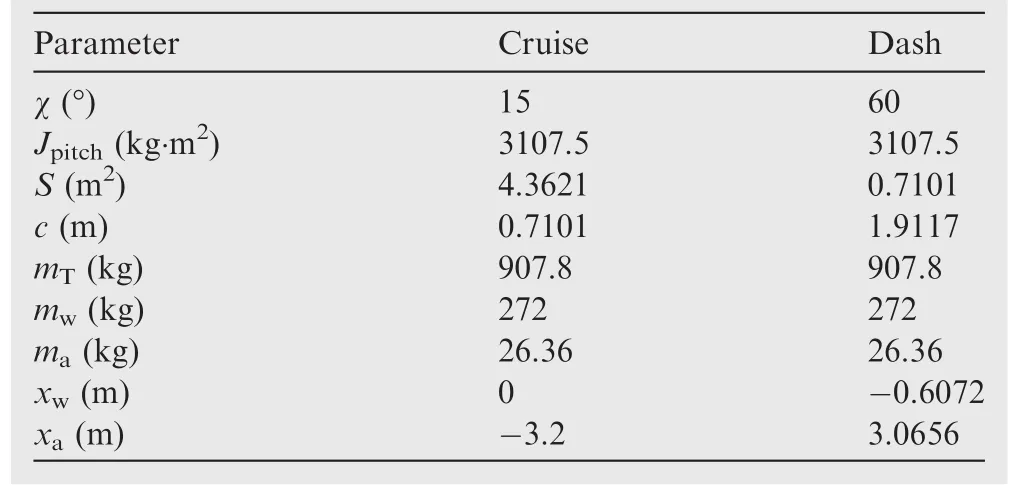
Table 1 Parameters of aircraft for cruise and dash configurations.
where δeis the elevator defection.
The flight condition concerned in the paper is chosen as the altitudeH=12000 m and Mach numberMa=0.5.The parameters of the aircraft for cruise configuration and dash configuration are given in Table 1.4
The reference points of the system are selected as ξk=0,0.2,...,3.Moreover,the aerodynamic parameters for different scheduling parameters can be obtained by computational fluid dynamics(CFD),which can be showed in Eq.(61).
Therefore,the LPV model of the morphing aircraft can be obtained as follows by Jacobian linearization:34
where the state vector is defined asx(k)=with Δα and Δqthe deviations of attack angle and pitch rate;the input signal isu(k)=Δδe.,with Δδethe deviation of elevator deflection.
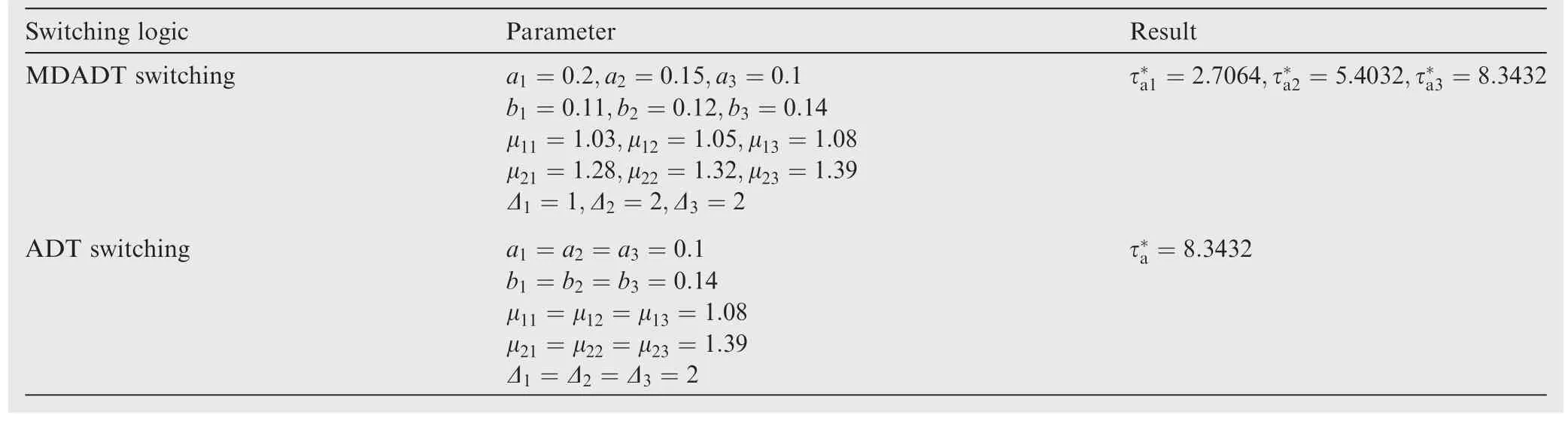
Table 2 Parameters and results of system under different switching logics.

Table 3 Interval of scheduling parameter for each subset.
4.2.Design of control system
In order to improve the performance of the control system,a command filter is introduced to ensure the smoothness of the input signal,which includes one amplitude limiting filter and one rate limiting filter.It can be realized as follows:
where ζnand ωnare the damping ratio and band width of the filter;SMandSRare the functions of amplitude limiting filter and rate limiting filter.
Moreover,there exist operation points with inherently static instability during the change of configuration.In order to solve this problem,an angular rate compensator is adopted,which can be expressed in Eq.(64).
whereTqandKqare the parameters of compensator to obtain desired damping ratio and band width.
The disturbance is supposed to be a harmonics wind gust,which is generated by the system given by Eq.(65).
wherel(k)is the state vector of disturbance generator and the initial value ofl(k)is set to be [0.01,0].
Therefore,the structure diagram of the flight control system is showed in Fig.2.
The variation rate of wing sweep angle is supposed to be less than 3(°)/s.Meanwhile,the constant scalars of the system are listed in Table 2.It is noticed that the ADT switching is independent of the modes of the system and can be viewed as one special case of MDADT switching.Furthermore,it is obvious that any switching signal satisfying ADT switching logic will satisfy MDADT switching logic,and thus we have Therefore,the less conservative results are obtainedby MDADT method.In addition,one can calculate the minimal performance cost γmin=0.8654 by Eq.(56)and the maximal performance cost γmax=2.9689 by common Lyapunov functional method.We choose the desired performance cost γ=1.9 in this paper.Then,the set of scheduling parameter is divided into 3 subsets by the algorithm proposed in the paper,which are described in Table 3.Meanwhile,the matricesPi(ξk),Si(ξk)and(ξk)can be obtained by Theorem 2 and the controller can be constructed by Eq.(50).
The variation rate of wing sweep angle is supposed to be
As shown in Fig.3,there are 4 switching points occurring at 17.70 s,24.72 s,45.30 s and 52.32 s.
Then,the simulation results are performed as follows to demonstrate the effectiveness of the proposed method.
Case 1.It is supposed that the controllers are precise.The maximum packet dropout bounds are set to be=5,=6,and the packet dropout rates are set to be ρ =0.9,λ =0.95.We attempt to illustrate the superiority of asynchronous switching controller.The synchronous switching controllers are given as the comparative simulations.The results of the simulation are showed in Fig.4.The response of angle of attack and the error of angle of attack are showed in Fig.4(a)and(d).αcom,αasyand αsyrepresent the command signal,response of angle of attack with asynchronously switched controller and synchronously switched controller.Similarly,the meanings ofqasy,qsy,easy,esy, δe_asyand δe_sycan be obtained.From the results,we can conclude that the performance of the system will be degraded due to the existence of asynchronous switching.By the aid of asynchronous switching controller proposed in the paper,the overshoot and error can be reduced and better tracking performance can be obtained.
Fig.4(b)and(c)shows the response of pitch rate and elevator deflection,from which we can conclude that the better performance of pitch rate and elevator deflection can also be achieved by the method proposed in the paper.
Case 2.It is supposed that there exist controller gain perturbation,zero deviation,external disturbance and asynchronous switching in the system.We set the maximum allowable packet dropout bounds=5,=6 and the packet dropout rates are set to be ρ =0.9, λ =0.95.The results are showed in Fig.5,in which the response of angle of attack,pitch rate,elevator deflection and the error of angle of attack are depicted.Curves 1,2 and 3 represent the response of robust controller,6non-fragile controller with ADT method16and the method proposed in this paper.One can conclude that the better tracking performance can be obtained by non-fragile controllers,and the non-fragile controller can overcome the undesirable response caused by controller uncertainties.Furthermore,because the MDADT method makes full use of the properties of each subsystem,the less conservative results and better transient performance can be achieved by the proposed method,which illustrate the superiority of the method.Meanwhile,the elevator deflection is practical and achievable.
Taken together,we can conclude that the non-fragile controller with asynchronous switching can overcome the influence caused by controller uncertainties,asynchronous switching and external perturbation efficiently.The less conservative results about asynchronous switching can be achieved by MDADT method.The stability and robustness of the controller proposed in the paper have been commendably validated.
5.Conclusions
(1)Considering dramatic parameter variation,we establish the switched LPV model of the morphing aircraft to describe the process of wing transformation.The data missing is taken into account in the links from sensors to controllers and from controllers to actuators.
(2)The update of controller mode always lags behind the system mode due to the data missing in the system,which will lead to asynchronous switching.The asynchronousH∞analysis method for morphing aircraft based on MDADT switching is investigated and less conservative results are obtained.
(3)Owing to the inherent uncertainties of controller,the non-fragile state-feedback controller in MDADT switching framework is constructed to overcome the undesirable response.The stability and prescribed performance are guaranteed by combining multiple Lyapunov functional method and MDADT method.
(4)An automatic partition method for scheduling parameter is applied to the morphing aircraft to avoid meaningless tests and improve the efficiency of designing process.Moreover,simulation results in the end demonstrate the effectiveness of this approach.
Acknowledgements
This study was supported by the National Natural Science Foundation of China(Nos.61374012,61273083and61403028).
1.Baldelli DH,Lee DH,Sa´nchez Pen˜a RSS,Cannon B.Modeling and control of an aeroelastic morphing vehicle.J Guidance,Contr,Dyn2008;31(6):1687–99.
2.Weisshaar TA.Morphing aircraft systems:historical perspectives and future challenges.J Aircr2013;50(2):337–53.
3.Seigler TM,Neal DA.Analysis of transition stability for morphing aircraft.J Guid,Contr,Dyn2009;32(6):1947–54.
4.Jiang WL,Dong CY,Wang Q.A systematic method of smooth switching LPV controllers design for a morphing aircraft.Chin J Aeronaut2015;28(6):1640–9.
5.Yue T,Wang LX,Ai JQ.Longitudinal linear parameter varying modeling and simulation of morphing aircraft.J Aircr2013;50(6):1673–81.
6.Wang T,Dong CY,Wang Q.Finite-time boundedness control of morphing aircraft based on switched systems approach.Optik2015;126(23):4436–45.
7.Yue T,Wang LX,Ai JQ.Gain self-scheduledH∞control for morphing aircraft in the wing transition process based on an LPV model.Chin J Aeronaut2013;26(4):909–17.
8.Briat C.Stability analysis and control of a class of LPV systems with piecewise constant parameters.Syst Contr Lett2015;82:10–7.
9.Emedi Z,Karimi A.Fixed-structure LPV discrete-time controller design with inducedL2-norm andH2performance.Int J Control2016;89(3):494–505.
10.Piga D,Cox P,To´th R,Laurain V.LPV system identification under noise corrupted scheduling and output signal observations.Automatica2015;53:329–38.
11.Hoffmann C,Werner H.A survey of linear parameter-varying control applications validated by experiments or high-f i delity simulations.IEEE Trans Control Syst Technol2015;23(2):416–33.
12.He X,Zhao J.Multiple Lyapunov functions with blending for inducedL2-norm control of switched LPV systems and its application to an F-16 aircraft model.Asian J Control2014;16(1):149–61.
13.Huang YQ,Sun CY,Qian CS,Wang L.Linear parameter varying switching attitude control for a near space hypersonic vehicle with parametric uncertainties.Int J Syst Sci2015;46(16):3019–31.
14.Park P,Kwon NK,Park BY.State-feedback control for LPV systems with interval uncertain parameters.J Franklin Inst2015;352(11):5214–25.
15.Ma YC,Gu NN,Zhang QL.Non-fragile robustH∞control for uncertain discrete-time singular systems with time-varying delays.J Franklin Inst2014;351(6):3163–81.
16.Wang D,Shi P,Wang W,Karimi HR.Non-fragileH∞control for switched stochastic delay systems with application to water quality process.Int J Robust Nonlinear Control2014;24(11):1677–93.
17.Senthilkumar T,Balasubramaniam P.Non-fragile robust stabilization andH∞control for uncertain stochastic time delay systems with Markovian jump parameters and nonlinear disturbances.Int J Adapt Control Signal Process2014;28(3–5):464–78.
18.Kchaou M,Hajjaji AE,Toumi A.Non-fragileH∞output feedback control design for continuous-time fuzzy systems.ISA Trans2015;54:3–14.
19.Park MJ,Kwon OM,Park JH,Lee SM,Cha EJ.Synchronization of discrete-time complex dynamical networks with interval timevarying delays via non-fragile controller with randomly occurring perturbation.J Franklin Inst2014;351(10):4850–71.
20.Huang YQ,Sun CY,Qian CS,Wang L.Non-fragile switching tracking control for a flexible air-breathing hypersonic vehicle based on polytopic LPV model.Chin J Aeronaut2013;26(4):948–59.
21.Yang TT.LI AJ,Niu EZ.Robust dynamic output feedback control for switched polytopic systems under asynchronous switching.Chin J Aeronaut2015;28(4):1226–35.
22.Yuan CZ,Wu F.Asynchronous switching output feedback control of discrete-time switched linear systems.Int J Control2015;88(9):1766–74.
23.Zhang LX,Shi P.Stability,L2-gain and asynchronousH∞control of discrete-time switched systems with average dwell time.IEEE Trans Autom Control2009;54(9):2193–200.
24.Zhang LX,Gao HJ.Asynchronously switched control of switched linear systems with average dwell time.Automatica2010;46(5):953–8.
25.Li J,Yang GH.Asynchronous fault detection filter design approach for discrete-time switched linear systems.Int J Robust Nonlinear Control2014;24(1):70–96.
26.Zhong GX,Yang GH.Fault detection for uncertain switched systems with time-varying delays.J Franklin Inst2015;352(4):1455–75.
27.Zhao XD,Zhang LX,Shi P,Liu M.Stability and stabilization of switched linear systems with mode-dependent average dwell time.IEEE Trans Autom Control2012;57(7):1809–15.
28.Lu QG,Zhang LX,Karimi HR,Shi Y.H∞control for asynchronously switched linear parameter-varying systems with mode-dependent average dwell time.IET Control Theory Appl2013;7(5):673–83.
29.Yazdi EA,Sepasi M,Sassani F,Nagamune R.Automated multiple robust track-following control system design in hard disk drives.IEEE Transact Control Syst Technol2011;19(4):920–8.
30.Yazdi EA,Nagamune R.A parameter set division and switching gain-scheduling controllers design method for time-varying plants.Syst Control Lett2011;60(12):1016–23.
31.Tan C,Li L,Zhang HS.Stabilization of networked control systems with both network-induced delay and packet dropout.Automatica2015;59:194–9.
32.Xie LH,Fu MY,De Souza CE.H∞control and quadratic stabilization of systems with parameter uncertainty via output feedback.IEEE Trans Autom Control1992;37(8):1253–6.
33.Seigler TM.Dynamics and control of morphing aircraft[dissertation].Blacksburg(VA):Virginia Polytechnic Institute and State University;2005.
34.Marcos A,Balas GJ.Development of linear-parameter-varying models for aircraft.J Guid,Control Dyn2004;27(2):218–28.
13 July 2016;revised 8 September 2016;accepted 28 October 2016
 CHINESE JOURNAL OF AERONAUTICS2017年3期
CHINESE JOURNAL OF AERONAUTICS2017年3期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Review on signal-by-wire and power-by-wire actuation for more electric aircraft
- Real-time solution of nonlinear potential flow equations for lifting rotors
- Suggestion for aircraft flying qualities requirements of a short-range air combat mission
- A high-order model of rotating stall in axial compressors with inlet distortion
- Experimental and numerical study of tip injection in a subsonic axial flow compressor
- Dynamic behavior of aero-engine rotor with fusing design suffering blade of f