
基于平面多目标光学定位
2017-11-17 21:09蓝昭博王洪源陈慕羿付垚汤秋艳
电脑知识与技术 2017年30期
蓝昭博++王洪源++陈慕羿++付垚++汤秋艳


摘要:将多个激光雷达依照一定的摆放顺序,实现对平面物体的位置确定。通过三角定位原理,利用激光雷达对平面上的物体进行固定频率扫描,获得时间组数据,实现硬件设备与windows平台的连通,通过frame_grabber与计算机进行数据交互。通过Matlab软件对得到的实践组坐标进行坐标转换和数据融合处理,以此得到物体在平面上的准确位置坐标。
关键词:多目标;激光雷达;三角定位;坐标处理
中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2017)30-0251-02
1 平面多目标定位系统设计
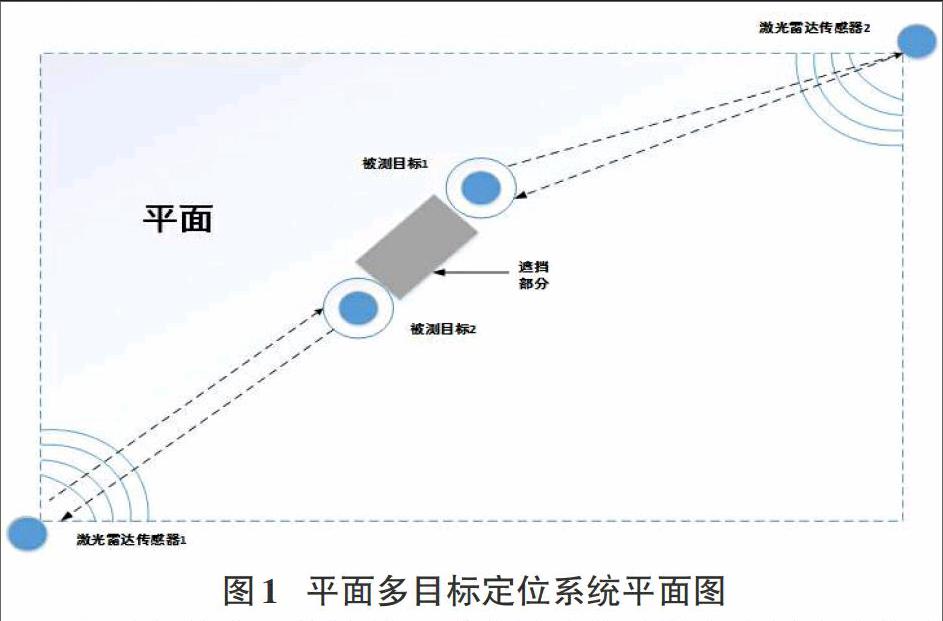
激光雷达测距是在平面底角摆放激光雷达传感器,平面放置物体,传感器以固定频率旋转发射激光打在物体上,接受反射回来的激光,可根据传感器与平面角度和反射时间得到一组位置时间数据,通过算法和坐标转换就可以确定该物体在平面的相对位置。对于多目标的定位,我们采取使用两个激光传感器,根据两个传感器分别打在物体上,从而依靠对同一物体的两组数据进行融合,从而得到物体准确的位置信息,也避免物体间相互遮挡从而导致的物体定位不准确的问题。定位系统平面图如图1所示。
图1 平面多目标定位系统平面图
以对角线方式摆放的双激光雷达传感器实现了当物体间发生遮挡时,物体最少会被扫描一次,从而得到一组时间和位置数据。不会因为遮挡而导致物体无法被扫描的情况发生。
近距离平面多目标定位系统主要包括两个部分,PC端、激光雷达传感器。激光雷达设备主要负责对平面内的一个或多个物体进行扫描,在同一时间得到同一物体的两组位置数据,根据激光雷达的SDK与计算机进行数据连通。而计算机主要负责硬件设备的数据接收,以及对接受数据的坐标转换、数据融合、平滑处理等操作。
2 相关算法和原理
激光三角测距原理:激光的三角测距原理是就是让一束激光经过发射源照射到被测物体表面上,物体表面散射的光线通过接收器汇聚到高分辨率的光电检测器上,形成一个散射光斑,该散射光斑的中心位置由传感器与被测物体表面之间的距离决定,而光电检测器件输出的電信号与光斑中心位置有关。因此,通过对光电检测器件输出电信号进行运算处理,就可以获得传感器与被测物体表面距离的信息。如图2所示,就是激光雷达三角测距原理图。根据图显示,若假设发射源和接收器间的距离为Y,移动前发射源与被测物体的距离为X1,移动后发射源与被测物体距离为X2,根据公式1所示,就可以计算出被测物体的位置。
三角交汇定位原理:该方法利用传感器测得被测目标与传感器间的方位信息进行三角交汇,从而测得目标位置方法原理图如图3所示。
设被测目标T的坐标为(x,y),平面两条边作为直角坐标系的X轴和Y轴,传感器1放在坐标为(x1,y1),传感器2放置在坐标为(x2,y2)。传感器1测得与目标物体的距离用r1表示,传感器2测得与目标的距离用r2表示。如下公式(2)可得:
3 实验结果
实验结果如表1所示。
如表1显示,数值和实际距离为10:1厘米。传感器1和传感器2下属的“测算位置”表示单个传感器测量的目标位置坐标。融合位置代表两传感器依靠三角交汇原理所测算出的位置坐标。三角交汇原理分为三种情况。第一种,由于圆心距离大于两圆半径和时,两圆相离。即两传感器测出的距离和小于两传感器距离时,无法测算目标位置,也就是表明测算距离有误,需重新测量,如表1位置1、位置3、位置6数据所示。第二种,当物体间发生遮挡,单个目标无法被两个传感器同时扫描到时,可依据单个传感器定位原理进行坐标测算,如表1位置4、位置7数据所示。第三种,当传感器测算距离无误且不发生遮挡时,可以正确估算目标位置坐标,如表1位置2、位置5、位置8、位置9数据所示。
4 结束语
利用激光传感器可以实现平面内近距离目标位置信息的获取,在软件上进行数据分析和操作。可以在多种途径对位置信息进行应用,比如游戏软件的人物定位等。在实际生活中有广泛的应用。
参考文献:
[1] 张志涌.精通MATLAB 6.5版[M].北京航空航天大学出版社,2003.
[2] 王德志.激光雷达原理[J].科协论坛,2008(5).
[3] 李清泉.李必军.陈静.激光雷达测量技术及其应用研究[J].武汉测绘科技大学学报,2000(5).
[4] 吴剑锋.王文.陈子辰.激光三角法测量误差分析与精度提高研究[J].机电工程,2003(5).
猜你喜欢
北京测绘(2022年5期)2022-11-22
中国交通信息化(2021年8期)2021-11-02
汽车观察(2021年8期)2021-09-01
空间科学学报(2020年6期)2020-07-21
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
南水北调与水利科技(2016年5期)2016-12-27
大学教育(2016年7期)2016-07-27
