便携式AUV水下对接过程中的碰撞分析与罩式对接平台优化设计
2017-11-17 01:16张医博唐元贵要振江
海洋技术学报 2017年5期
张医博 ,唐元贵 ,要振江
(1.中国科学院沈阳自动化研究所机器人学国家重点实验室,辽宁 沈阳 110016;2.中国科学院大学,北京 100049)
便携式AUV水下对接过程中的碰撞分析与罩式对接平台优化设计
张医博1,2,唐元贵1*,要振江1,2
(1.中国科学院沈阳自动化研究所机器人学国家重点实验室,辽宁 沈阳 110016;2.中国科学院大学,北京 100049)
以便携式自主水下机器人(AUV)和罩式导向对接平台的水下对接过程为研究对象,将碰撞力大小和对接时间作为评价指标,研究导向罩形状、对接管尺度以及AUV与对接管的偏心距对整个对接过程的影响。在三维建模的基础上,使用ADAMS软件进行动力学仿真分析,结果表明,减小导向罩开口角度、增大对接管直径、减小偏心距可以适当减小碰撞力和对接时间。通过对上述影响因素与评价指标建立函数关系,利用多目标优化设计的方法并结合实际情况对参数做出合理的分析和筛选,为水下机器人对接平台提供设计依据。
便携式AUV;水下对接;碰撞分析;ADAMS仿真;多目标优化设计
随着人类对海洋探索和开发的日趋深入,作为一种有效的海洋探测工具,AUV及其相关技术得以快速发展。其中,用以提升AUV水下连续探测时间、提高其探测效率的水下对接技术及其装置成为国际上的一个研究热点。早在20世纪90年代,WHOI和MIT就已联合研制用于AOSN的水下对接系统[1]。此后,美国海军LRMS对潜艇布放和回收AUV进行了研究,日本川崎重工设计出用于Marinebird AUV的水下落坐式对接系统,美国WHOI针对REMUS AUV研制了导向罩式水下对接系统[2],美国MBARI设计了用于Bluefin-21 AUV的对接装置[3],挪威Kongsberg公司设计出用于回收REMUS-100 AUV的水下移动式对接装置[4],我国哈尔滨工程大学研制的AUV水下对接系统也于2015年10月通过验收。众多科研机构对水下对接装置的广泛研究,为AUV长时间、高效率的工作提供了可能。
本文依托于中科院沈阳自动化研究所的便携式AUV,开展与之相匹配的水下对接平台研究工作。限于该AUV导航定位精度以及海流等的影响,对接装置采用导向罩式设计,此时对接过程中发生碰撞是不可避免的。在AUV成功进入对接管的前提下,从有利于对接的角度考虑,将碰撞力大小和对接时间长短作为评价指标,研究导向罩的角度、对接管的直径以及AUV与对接管的偏心距对上述指标的影响。据此,在便携式AUV和对接装置的三维模型的基础上,使用ADAMS软件对该过程进行动力学仿真分析,得到上述参数和评价指标间的关系。然后建立相应的目标函数,采用优化设计的方法,得到合适的设计参数,从而为对接装置的设计提供依据。
1 对接过程动力学模型的构建
此便携式AUV为鱼雷型,总长2 m、直径0.2 m,尾部配备1个主推进器和4个舵板,如图1所示。其通过推进器和舵板的联合控制来实现水中自由运动,垂直面运动精度为±0.45 m,水平面运动精度为5‰。近距离对接时,AUV在水中的运动受到自身重力FG、水的浮力FB、螺旋桨推力FP和水动力FH(力FR和力矩MR)的作用。其中,重力与浮力大小相等,重心在浮心下方10 mm,所有力(重力除外)的作用点在浮心。与之相应的对接装置,采用开架式结构,以减少沉积物的堆积。在对接装置的最前方是一个圆锥导向罩,用来增大有效对接面积。
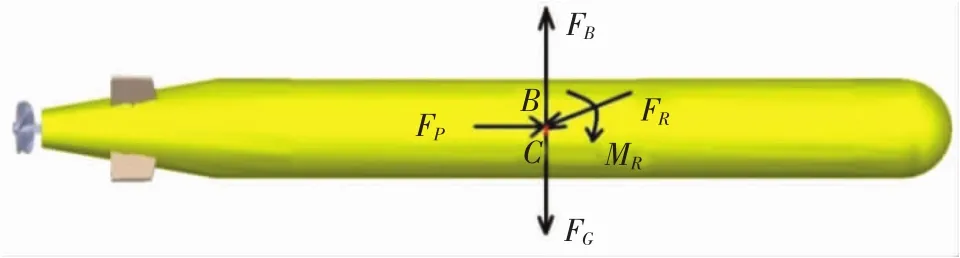
图1 便携式AUV受力分析
1.1 水动力建模
AUV运动所受的水动力极为复杂,若不考虑海流的影响,其水动力FH可以看成附加质量项和阻尼项的线性叠加。阻尼项由势流阻尼、表面摩擦和涡流阻尼组成[5]。
FH=-MAv˙-CA(v)v-D(v)v
AUV低速航行时,通常忽略二阶以上的项,同时假设运动无耦合、AUV被近似看作圆柱体对称结构。那么,附加惯性矩阵MA可简化为对角线形式,科里奥利向心力附加质量矩阵CA(v)可简化为反对称矩阵形式,阻尼项也可简化为仅包括线性项和二次项的形式[5],各系数矩阵表示如下:

其中,水动力系数常用试验方法测得,而根据相似性原理,本文所需的水动力系数使用文献[6]中给出的。
1.2 碰撞接触力建模
碰撞是一个非定常、变边界的高度非线性动力学问题,其中碰撞接触力受到材料、接触面几何形状、碰撞速度等诸多因素的影响。对于该问题的研究,目前主要有冲量动量法、连续碰撞力模型和有限元方法3种。在工程应用领域,连续碰撞力模型可以计算出每个时刻碰撞力的大小而且方法简单易行,从而得到了广泛的应用。此便携式AUV的碰撞力F分为垂直于接触面的法向分量Fn和沿接触面的切向分量Fτ,分别使用连续碰撞力模型和库仑摩擦定律对这两个分量进行建模。
法向接触力Fn以Hertz接触理论为基础,采用非线性弹簧阻尼模型。其引入阻尼项来描述碰撞过程中的能量损失,表达式为[7]:

式中:k为刚度系数;n为非线性指数;δ为接触面法向相对形变量;δ˙为相对侵入速度;D为阻尼系数。
根据Hertz接触理论,以铝为材料,取n=1.5,k的计算式如下:

式中:R1,R2为接触面半径;v1,v2为材料泊松比;E1,E2为材料的杨氏模量。
对于阻尼系数D的计算,使用Lankarani和Nikravesh提出的修正迟滞阻尼系数,计算公式如下:
式中:k为碰撞的刚度系数;e为恢复系数;δ˙0为碰撞前两物体的相对速度。
切向力Fτ使用经典的库仑摩擦力模型,其表达式为:

式中:μ为摩擦系数;Fn为法向接触力。碰撞力大小为:

方向与接触面夹角为θ,其中:
2 对接过程仿真分析
AUV从到达导向罩前方,直至完全进入对接管的这个过程中,其受到的水动力和碰撞力一直在发生变化,所以对整个过程进行理论求解十分困难。因此,使用ADAMS软件对该过程进行动力学仿真,通过数值方法进行分析计算。该仿真所需的各种参数如表1所示,各个作用力可在前文分析的基础上施加到模型中。针对碰撞力大小和对接时间长短进行研究,同时分析相关因素对这两个指标的影响。
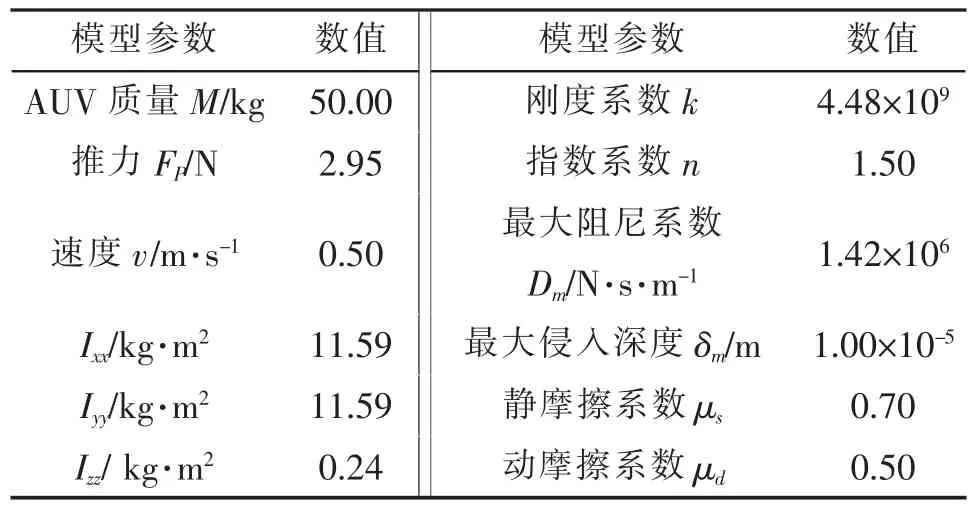
表1ADAMS中参数的设置
2.1 对接过程分析
AUV以0.5 m/s的速度匀速驶向对接平台,在碰触到导向罩后,其运动速度大小与方向发生改变,经过多次碰撞后完全进入对接管,整个过程如图2所示。

图2 对接仿真过程图
2.2 碰撞力的变化
在上述对接过程中,AUV与导向罩、对接管的碰撞力随时间的变化情况如图3所示。通过多次仿真可知,只需考虑前两个碰撞力峰值F1和F2的大小,其余的碰撞力对对接过程影响很小。其中,F1在AUV与导向罩刚接触时产生,如图2(b)所示时刻;F2在AUV头部刚进入对接管时产生,如图2(c)所示时刻。
2.3 对接过程相关影响因素的研究
AUV在水下运动过程中,导航定位系统会产生一定误差,同时由于海流等的影响,AUV与对接管很可能产生偏差,此处定义AUV轴线和对接管轴线间的距离为偏心距L。为保证对接成功率,圆锥状导向罩的大径尺寸采用1 m,小径尺寸等于对接管直径,导向罩角度设定为θ,则其长度h可由这3个尺寸计算得出。对接管直径设定为d、长度为1.2 m。该模型的导向罩和对接管均使用铝材。在前述基础上,研究导向罩角度θ、对接管直径d和偏心距L这3个参数对碰撞力和时间的影响,以θ=72°、d=0.24 m和L=0.2 m为基础条件,每次只改变其中一个参数,进行一系列仿真研究。

图3 碰撞力随时间的变化曲线

图4 各个参数的表示图
首先对导向罩角度进行研究,其开口角度不同,AUV初次碰撞后速度大小和运动方向的变化就有差异,从而对碰撞力和时间有一定影响。当θ取不同的值时,碰撞力和对接时间如表2所示。通过数据可知,开口角度θ对这两个指标的影响十分显著:F1随θ的增大明显增大,F2随θ的增大明显减小,对接时间随θ的增大而增大。
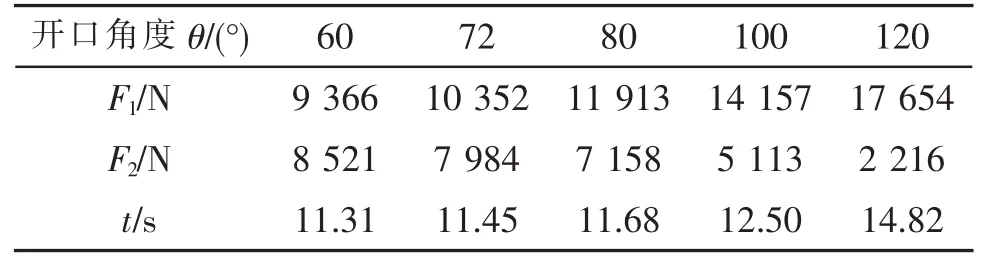
表2 导向罩开口角度θ对指标的影响
对接管直径的不同,也会影响碰撞力和对接时间,表3中显示了相应的数值关系。由于θ不变,所以表格中F1的大小相近。随着对接管直径d的增大,F2增大。在d=0.30 m时,F2的大小接近F1。而d的增大使对接时间有所减少,使AUV受外界影响减小。但是,对接管直径的增大不利于AUV在对接管中的固定,在海流等的影响下可能导致充电效率降低。

表3 不同直径对指标的影响
偏心距的不同对于碰撞力和时间的影响情况如表4所示,在其他条件一定的情况下,增大偏心距L,碰撞力F2增大,对接时间增长。如果偏心距接近甚至大于导向罩大径的1/2,直接导致对接失败。所以,适当提高AUV的导航精度,使对接过程更加顺利。
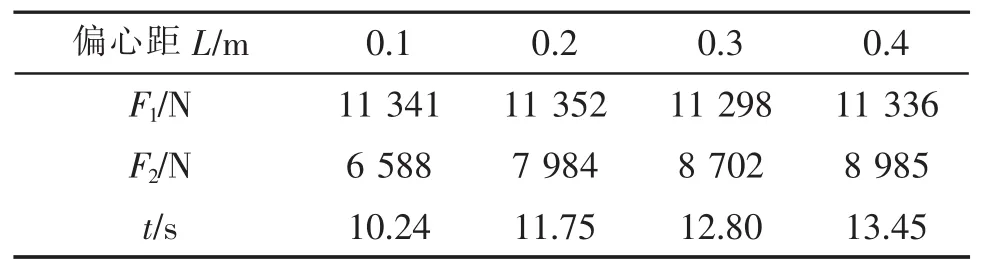
表4 偏心距对指标的影响
3 对接多目标优化
综合上述仿真可见,各个参数对于碰撞力和时间的影响效果不同,甚至有些参数的影响作用正好相反。为得到较优的设计参数,要结合实际需求进行分析。本文仅以θ、d和L这3个几何参数为设计变量,利用碰撞力和对接时间建立目标函数,在一定约束条件下,进行优化设计。为定量表示θ、d和L和碰撞力及对接时间的关系,可使用回归分析法。对于表1~表3中的数据,通过MATLAB统计工具箱的stepwise函数分析得到如下函数关系式:
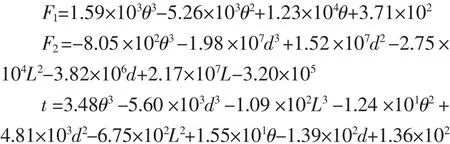
对接过程中,过大的碰撞力可能造成设备损坏,同时严重干扰AUV的运动,从而影响对接的顺利进行。对接过程耗费的时间越长,则受外部干扰越大,此种情况大大增加了对接的不确定性,不利于对接成功。所以,将碰撞力最小和对接时间最短作为目标函数。同时,使F1和F2大小接近,从而防止其中一个过大而另一个过小。与此同时,对接装置还需要满足一定物理尺寸的约束。最终确定优化设计的数学模型如下:
目标函数:Min:F=F1+F2
Min:t
约束条件:
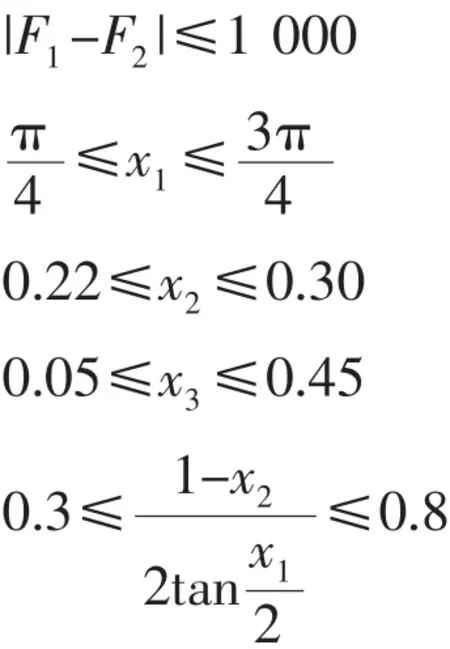
对于此多目标优化问题,使用序列二次规划算法,利用MATLAB优化工具箱的globalsearch函数进行求解,得到其局部最优点为[0.8702,0.2563,0.05]T、[0.9010,0.30,0.05]T、[0.8869,0.2479,0.45]T和[1.2405,0.30,0.45]T。经计算可知,当设计变量值X=[0.8702,0.2563,0.05]T时,目标函数值F1=8 131 N、F2=8 130 N、t=8.82 s满足设计要求。即在材料一定的情况下,导向罩开角50°、对接管直径0.25 m、偏心距为0.05 m时,有利于本研究的便携式AUV水下对接的实现。
4 结论
本文针对便携式AUV水下对接过程进行了研究,通过对接过程的分析、动力学模型的构建和多目标优化设计,得到对接装置的设计参数值。首先明确对接过程的评价指标,并确定该指标的相关影响因素。然后,建立AUV动力学模型和碰撞力模型,利用ADAMS软件对整个对接过程进行仿真,从而获得不同影响因素下的评价指标数值。最后,对所得数据进行综合分析,得到评价指标与影响因素的函数关系,再通过一定的优化方法,求得合适的设计变量数值,为对接装置的设计打下基础。在实际情况下,影响对接的因素还有很多,如:海流变化、海水能见度和AUV速度等。上述研究虽然仅对一部分影响因素进行了分析,但作为主要且易控的因素,已可作为对接装置的主要设计参数,从而得到应用。在后续的研究中,将会加入更多影响因素,使得对接过程的研究更加全面且深入。
[1]Frye DE,KempJ,PaulW,et al.Mooring Developments for Autonomous Ocean-Sampling Networks[J].IEEE Journal of Oceanic Engineering,2001,26(4):477-486.
[2]StokeyR,Allen B,AustinT,et al.Enabling Technologies for REMUS Docking An Integral Component of an Autonomous Ocean-Sampling Network[J].IEEE Journal of Oceanic Engineering,2001,26(4):487-497.
[3]Hobson BW,McEwen RS,EricksonJ,et al.The development and ocean testing of an AUV docking station for a 21''AUV[C]//Vancouver:MTS/IEEE OCEANS,2007.
[4]Raspante F.Underwater mobile docking of autonomous underwater vehicles[C]//Virginia Beach:MTS/IEEEOCEANS,2012.
[5]Fossen TI.Guidance and Control ofOcean Vehicles[M].Hoboken:John Wiley&Sons Inc,1994:37-43.
[6]王波.微小型水下机器人运动仿真研究[D].哈尔滨:哈尔滨工程大学,2008:26-28.
[7]LANKARANIH M,NIKRAV ESHPE.Continuous Contact Force Models forImpactAnalysisin Multibody Systems[J].Nonlinear Dynamics,1994,5(2):193-207.
[8]史剑光,李德骏,杨灿军,等.水下自主机器人接驳碰撞过程分析[J].浙江大学学报(工学版),2015,49(3):497-504.
[9]郭卫东.虚拟样机技术与ADAMS应用实例教程[M].北京:北京航空航天出版社,2008.
The Collision Analysis of Portable AUV Underwater Docking and Optimal Design of the Docking Platform
ZHANG Yi-bo1,2,TANG Yuan-gui1,YAO Zhen-jiang1,2
1.State Key Laboratory of Robotics,Shenyang Institute of Automation,Chinese Academy of Sciences,Shenyang 110016,Liaoning Province,China;
2.University of Chinese Academy of Sciences,Beijing 100049,China
In order to design an underwater docking platform for the portable Autonomous Underwater Vehicle(AUV),the simulation of underwater docking process is conducted in this paper,with the collision force and docking time defined as the evaluative indices.On the basis of three-dimensional modeling,dynamic analysis is carried out by using the ADAMS software.The simulation results show that reducing the opening angle,increasing the tube diameter and decreasing the eccentricity between the AUV and the center line of the tube can lower the collision force and docking time.This paper then uses the influencing factors and evaluative indices mentioned above to establish the function relations.By taking the method of multi-objective optimization and combining with the actual situation,a set of suitable values of parameters can be obtained,so as to provide a basis for the design of the platform.
portable AUV;underwater docking;collision analysis;ADAMS simulation;multi-objective optimization
P715.5
A
1003-2029(2017)05-0027-05
10.3969/j.issn.1003-2029.2017.05.005
2017-03-30
国家重点研发计划资助项目“全海深自主遥控潜水器(ARV)研制与海试”(2016YFC0300800)
张医博(1990-),男,硕士研究生,研究方向为水下机器人对接技术。E-mail:1394538469@qq.com
唐元贵(1980-),男,博士,研究员,研究方向为水下机器人技术、自主遥控水下机器人等。E-mail:tyg@sia.cn
猜你喜欢
作文成功之路(高考冲刺)(2022年8期)2022-11-21
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
当代陕西(2020年23期)2021-01-07
北方工业大学学报(2019年5期)2019-03-30
快乐语文(2018年7期)2018-05-25
中国洗涤用品工业(2017年2期)2017-04-16
小猕猴智力画刊(2016年12期)2017-01-05
小说月刊(2015年9期)2015-04-23