基于Solidworks的爬楼送水小车设计与仿真
2017-11-09 06:47:57吴丽华陈豪鹏祝铭力
浙江水利水电学院学报 2017年4期
吴丽华,陈豪鹏,祝铭力
(浙江水利水电学院 机械与汽车工程学院,浙江 杭州 310018)
基于Solidworks的爬楼送水小车设计与仿真
吴丽华,陈豪鹏,祝铭力
(浙江水利水电学院 机械与汽车工程学院,浙江 杭州 310018)
设计了一种能自动爬楼送水的小车.根据机械设计基本知识,确定了小车的总体设计方案及结构,借助Solidworks软件对小车的关键结构进行三维建模,并利用其仿真功能对小车的爬楼运动进行仿真.结果表明: 设计的小车结构简单、运行平稳,可较好地实现爬楼梯送水的功能.后续还可以继续优化,采用人工智能实现小车无人驾驶,在复杂的楼道地形中进行自动运水.
爬楼送水小车;Solidworks;三维建模;运动仿真
目前,运送到无电梯的大学寝室楼或居民楼的桶装矿泉水还是采用人工搬运的方式,该方式不仅效率低,而且还很费时费力.随着人们生活水平的提高,桶装矿泉水的需求不断增加,纯体力进行爬楼搬运的方式过于费时费力.国内外根据不同的设计原理和性能提出了多种形式的爬楼机构,几种典型的类型是履带式、轮式、腿式和轮腿式.腿式结构的主要特点是对于凹凸不平的路面具有超强的适应能力,不仅可以比较轻松的跨过障碍物,而且还可以适用于各种大小不一的台阶,但是这种机构的缺点是结构设计比较复杂,而且速度也不快,效率不高;履带式结构的特点是针对不同的地形适应能力比较强,缺点是耗能比较高,特别是在转弯时尤其明显;轮式结构是比较经典的运输结构,比较灵活并且控制相对简单,按照轮子的数目可以分为多种类型;轮腿式结构做到了将腿式结构对地形的强大适应能力以及轮式结构的灵活高效完美结合,但缺点是机械结构比较复杂[1].为解决上述问题,本文设计了一种基于Solidworks的可自动爬楼梯送水的小车[2-3],该小车省时省力、爬楼梯效果好.
1 小车总体方案设计
爬楼送水小车主要功能是实现小车的爬楼和搬水的动作,其核心是小车底盘爬楼机构和装卸水机构的设计.本文选用典型的轮式作为爬楼机构[4],为满足实际爬楼小车要求,前轮采用V轮式两轮机构加支撑轮的方式,左右对称布置;后轮采用三脚轮式三轮机构左右对称布置,减少重心波动范围,增加小车爬楼时的稳定性,轮组结构形式示意图(见图1).小车在平面运动时靠贴地的轮行走,V轮作为驱动轮,开始爬楼时,支撑杆轮抵住楼梯台阶侧面,通过杠杆原理,使V轮靠近台阶一侧向上抬高,从而继续前进,直到V轮前端上到台阶上表面带动后轮爬楼;同时,支撑杆轮靠不完全齿轮传动转回到前端,进行下一次爬楼准备,小车爬楼动作
分解(见图2).总体传动方案[5](见图3).前轮作为驱动轮,采用“两个电机”驱动,同一侧“前轮”和“后轮”用一条“同步带传动”,通过带传动带动后轮运动,并且通过改变两侧电机的速度差,即可实现小车的前进和转弯.

图1 爬楼轮组结构形式示意图
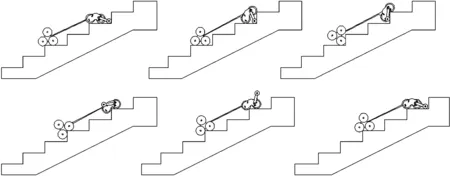
图2 小车爬楼梯动作分解示意图

图3 总体传动方案简图
2 小车关键结构设计
2.1 前轮结构设计
前轮采用V形轮的结构,既可以实现爬楼,又比较简单灵活,再配合支撑轮的辅助作用,完成爬楼的动作,前轮结构示意图(见图4(a)).支撑杆由单独的电机带动,通过不完全齿轮机构驱动,V轮的滚动由主电机带动齿轮传动来驱动,前轮齿轮传动示意(见图4(b)).在上楼过程中,支撑轮首先与台阶垂直面接触,并沿支撑杆产生支持力,相当于一个杠

图4 V轮三维结构示意图
杆,将V轮靠近台阶一侧抬起沿着台阶继续向上滚动,直到爬上台阶,当支撑杆到达一定角度时,不完全齿恰与传动齿轮啮合,带动支撑杆转动复位,使其进入下一台阶,如此往复,实现爬楼.
2.2 后轮结构设计
后轮主要是配合前轮顺利实现爬楼的功能,并且结构越简单越好.因此后轮采用三轮式结构对称布置,减少爬楼时小车重心波动范围,增加小车爬楼梯时的稳定性.三脚轮结构爆炸示意图(见图5).其传动与V轮相同采用齿轮传动,共有7个齿轮位于齿轮盘,中间主齿轮与主轴连接,通过齿轮传动把动力分别传递给三个轮子,从而实现后轮的运动.
底盘主要用槽钢制作,用于固定电机等部件,根据上述的设计,底盘爬楼机构三维示意图(见图6).

图5 三脚轮结构分解示意图

图6 底盘爬楼机构三维示意图
2.3 装卸水机构设计
装卸水机构就像货车的车斗,用可伸缩的手臂把桶装水搬到箱体里,箱体相对小车底盘可翻转,上楼之后用推臂推出桶装水实现卸货.该机构一共有3个直流减速电机,箱体上有两个电机,一个电机作用于推臂,使其完成卸水动作,另一个电机作用于可伸缩的手臂,使其完成搬水动作,第三个电机带动蜗杆使滑块螺母前后移动来实现箱体的翻转.箱体用于固定搬运机构的各个零件与两个电机,并且对可伸缩的手臂和推臂的动作起约束作用.手臂有前后伸缩、向内外旋转两个动作,通过触发开关,转换动作.当手臂上端凸出与框体凹槽保持接触,手臂前后伸缩;当手臂凸出与框体分离,手臂向内外旋转.箱体结构(见图7(a),翻转机构(见图7(b),伸缩式手臂结构(见图7(c)).

图7 装卸水机构示意图
3 确定轮子的尺寸

4 小车运动仿真
根据上述的设计,小车整体结构三维示意图(见图8);用三维软件Solidworks软件[6-7]的仿真功能,对小车的爬楼运动进行仿真[8](见图9).通过仿真可知,小车能平稳运动,实现爬楼送水的功能.
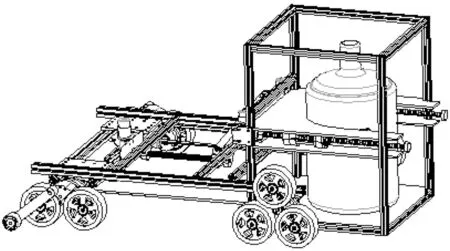
图8 小车整体结构三维示意图
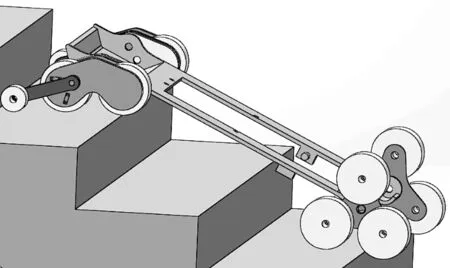
图9 小车爬楼梯运动仿真图
5 结 论
本文提出的可爬楼梯送水小车,具有伸缩式的手臂和可翻转的框体,通过丝杠传动较简单地实现了自动搬卸桶装矿泉水的动作. 底盘采用三角轮和带有支撑杆的V轮结构来实现自动爬楼梯的动作,异于普遍应用的履带式结构,结构简单,成本低,省时省力,非常适合无电梯的高校宿舍楼或居民楼的桶装水运输,可以通过预先设定的时间和数量,方便可靠地完成送水任务,解决了送水量大、费时费力成本高的问题.后续还可以继续优化,采用人工智能实现小车无人驾驶,在复杂的楼道地形中进行自动运水.
[1] 姚 怡.可上楼梯的智能机器人设计与实现[D].北京:北京邮电大学,2013.
[2] 赵华成,刘 武,潘聪华,等.重力势能驱动的自行避障小车设计与制作[J].浙江水利水电学院学报,2016,28(6):73-76.
[3] 屈 伸,李斯瑞,靳 松.一种重力势能驱动小车的设计与实现[J].湖南工业大学学报,2015,29(3):30-34.
[4] 童俊华.行星轮式爬楼梯机器人小车的研究[D].赣州:江西理工大学,2009.
[5] 徐雅蒙,施冬冬,杨瑞伟.爬楼卸载一体化运载小车设计[J].科技广场,2016(4):182-185.
[6] 曹银苟,车艳春,王永强.基于SolidWorks的液压支架Top-Down三维设计方法的研究[J].河南科技,2013(3):116-117.
[7] CAD/CAM/CAE技术联盟.SolidWorks 2012中文版从入门到精通[M].北京:清华大学出版社,2012.
[8] 赵书晓,赵 凯,宋树权.基于Pro/E的爬楼梯小车的设计和仿真[J].机械工程师,2008(7):134-135.
DesignandSimulationofClimbingCarBasedonSolidworks
WU Li-hua, CHEN Hao-peng, ZHU Ming-li
(College of Mechanical and Automotive Engineering, Zhejiang University of Water Resources and Electric Power, Hangzhou 310018, China)
An automatic climbing water vehicle is designed. According to the basic knowledge of mechanical design, the overall design scheme and the structure of the vehicle are determined. The main structure of the vehicle is 3D designed based on Solidworks software, and the climbing movement of the vehicle is simulated by using the simulation function of the software. The results show that the car design can realize the function of delivering water to climb the stairs with simple structure and stable operation. The unmanned automatic water is transported in the complex terrain after the vehicle controlled technology being optimized with the artificial intelligence.
climbing vehicle; Solidworks; 3D design; motion simulation
10.3969/j.issn.2095-7092.2017.04.016
TP32
A
1008-536X(2017)04-0079-05
2017-03-03
2016年浙江省大学生科技创新活动计划(新苗人才计划)项目(2016R434009)
吴丽华(1982-),女,山东青岛人,硕士,讲师,主要从事机械设计与制造方面的科研与教学工作.
猜你喜欢
数学小灵通(1-2年级)(2024年3期)2024-05-14 09:28:48
祝您健康(2024年3期)2024-03-03 13:27:39
橡塑技术与装备(2021年23期)2021-12-13 06:00:04
装备机械(2019年4期)2019-12-26 06:59:44
机械设计与制造(2018年2期)2018-03-05 12:33:02
青岛画报(2018年1期)2018-02-23 12:07:50
方圆(2017年24期)2018-01-17 20:55:33
知识窗(2017年9期)2017-09-28 23:19:42
中国新闻周刊(2017年23期)2017-07-12 17:54:06
科技创新导报(2016年3期)2016-05-30 18:52:06