
盾构同步注浆实际注入量的动态校验检测技术
2017-11-07 09:18郝震宇上海地铁盾构设备工程有限公司上海200031
绿色建筑 2017年2期
郝震宇(上海地铁盾构设备工程有限公司,上海 200031)
盾构同步注浆实际注入量的动态校验检测技术
Dynamic Calibration and Test Technology on Actual Quantity of Shield Synchronous Grouting
郝震宇(上海地铁盾构设备工程有限公司,上海 200031)
分析了盾构同步注浆设备的特点及同步注浆注入量现有检测技术的不足。在此基础上提出了同步注浆实际注入量的动态校验方法,并总结了提高盾构同步注浆实际注入量检测效果的技术攻关经验。
同步注浆;注入量检测;动态校验
1 盾构同步注浆技术
同步注浆系统是盾构机的重要组成部分。盾构掘进过程中,同步注浆系统将浆液及时送达盾构外壳和管片背部之间形成的建筑空隙中,从而使脱离盾尾的管片依附浆液在周围土体间及时获得支撑,以防止管片周围土体的坍塌,控制地表的沉降。
1.1 技术背景
盾构同步注浆系统是由注浆泵、储浆桶、液压动力站、注浆管路、球阀、电气控制系统以及各类传感器等组成。
注浆泵送出的浆液通过球阀控制输送至盾构外壳包管内对应注浆管路,如图 1 所示。注浆系统的累计注浆量采用在靠近主油缸活塞处的接近开关累计计数再乘以活塞腔内容积实现。
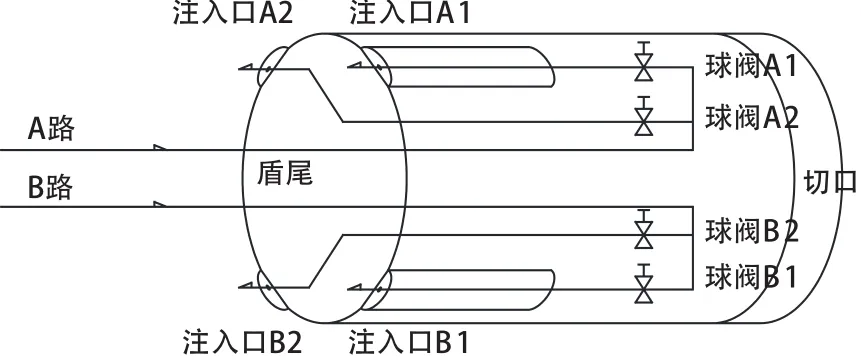
图1 同步注浆路径示意图
1.2 国内外现状
20 世纪 90 年代初引进的法国 FCB 公司土压平衡盾构的同步注浆是以设定土压力为目标值的闭环自动控制环节。由于设定压力与实际工况的差异,在工程中经常发生超量注浆或者欠量注浆情况,严重影响地层稳定性。因此,工程实际应用改用手动操作方式:在盾构掘进时安排操作人员就地控制每个注浆口注入规定的浆量。
此后盾构选型采用以注浆量为对象的同步注浆方式。技术人员根据建筑空隙的理论值结合施工环境、工况条件和施工经验确定掘进一环的注浆量。由 PLC 实现注浆量控制。近年来部分施工单位对注浆控制柜进行技术改造,改用变频器控制调整注浆量。
2 盾构同步注浆注入量现有检测技术的不足
现有盾构同步注浆实际注入量的检测主要有 3 种方法:电磁流量计检测方法、注浆活塞计数方法、视频图像采集信息方法。目前常用的是注浆活塞计数方法。
2.1 电磁流量计检测方法
当流动浆液通过电磁流量计切割磁力线时,其感生电势与流速成正比。在确定管径条件下,通过对电磁流量计的感生电动势的积分求得注浆浆液的体积。电磁流量计工作原理如图 2 所示。

图2 电磁流量计工作原理
由于同步注浆浆液在电磁流量计内胆的固结效应,并由固结效应引起实际浆液流径变小,所以造成电磁流量计检测注浆量准确性降低。
2.2 注浆活塞计数方法
注浆泵液压动力站控制系统通过关闭送料闸门、打开进料闸门以及主油缸后退动作,将储浆桶内的砂浆吸入注浆腔,实现进料工序;再通过关闭进料闸门、打开送料闸门以及主油缸前进动作砂浆被活塞挤压推出注浆腔,完成砂浆送料工序。油缸组相互配合地往复运行实现浆液的脉冲式泵送。
由于浆液粘滞性或压注速度变化直接影响活塞腔内浆液的占空比。当浆液实际配比变化或注入压力变化,使得实际注入浆液体积小于活塞腔内体积:Vr<V0。
因此在浆液比例、注入速度、注入压力等变化条件下采用注浆泵活塞次数的方法使得活塞腔内浆液的占空比具有随机性,不能保证实际注浆计量的准确性。
2.3 视频图像采集信息方法
视频图像采集方法无数值化信息,仅作为注浆活塞计数方法不足的一种补偿。
3 用液位计检测同步注浆实际注入量的技术难点
3.1 注浆箱内搅拌棒体积与液位为复杂非线性关系
到目前为止尚无用液位检测到同步注浆实际注入量的案例。其主要原因是:当液位处于搅拌棒运动轨迹之下,浆液液位与搅拌棒体积为复杂的非线性关系,由浆液液位很难求得同步注浆实际注入量。
3.2 液位的波动性
为防止浆桶内浆液凝结,浆桶搅拌棒需要不停地搅动,浆液液位受搅拌棒和台车倾角的影响,具有一定的波动性。
4 建立液位计动态校验同步注浆实际注入量的方法
4.1 浆桶液位波动数据分析
盾构在进行同步注浆时,浆桶内的搅拌器不停工作使浆液更均匀,实际液位波动呈非线性变化动态特征状态,如表1 所示。

表1 液位采样样本 (前8次观测值)
根据测量信号中包含动态载荷的特点,假设动态载荷由周期函数组成,则可获得液位变化信号:

式中:w——静态液位;
Ai——第 i 个频率成分动态载荷的幅值;
fi——频率;
φi——初始相位;
n——信号中动态频率成分数。
目标函数为:


式中:w——实际采样信号;
M——采样信号点数。
要获得最佳的静态液位估计,就要寻找最优的参数估计

要使得 F(X) 最小,有许多最优化算法可求解非线性最小二乘问题。这里借助在科学和工程计算方面功能强大的MATLAB 所提供的 Fittype 函数来对数据进行非线性拟合,结果如下所示:

4.2 液位差分方法
由于浆桶侧向对称中点与搅拌棒轴相交,浆桶上方平面几何中点测不到搅拌棒下方液位,所以在浆桶上方布置 2只激光测距仪,采用液位差分方法来抵消台车倾角引起液面变化。
2 只传感器与浆桶卧式搅拌轴位于同一平面发射激光垂直指向搅拌桶底(图 3),2 只激光传感器间隔 n+1/4 个螺旋周期,当传感器 A 检测到螺旋桨叶片位于最高点时,传感器 B 检测到的高程即为浆桶内砂浆液面的真实高度。当传感器 B 检测到螺旋桨叶片位于最高点时,传感器 A 同样能够检测浆桶内真实的液位高。连续两次分别由A和B测得的数据做平均处理,即可消除螺旋桨叶片对液位测量的干扰,也能消除因车架倾角而造成的液位测量误差。
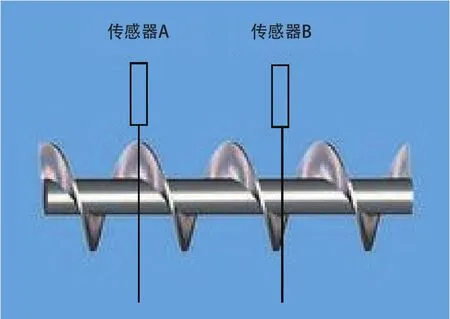
图3 激光传感器安装示意图
4.3 动态校验检测实际注浆量方法
搅拌棒叶片上沿到浆桶上沿为线性区域,搅拌棒叶片上沿到浆桶底为非线性区域(图 4)。由于掘进一环的浆液配方不变,且工况接近,所以当浆液在线性区域时记录注浆活塞次数,求得该区域注浆量Vr和活塞单次注入的实际体积Vs:


式中:a——浆桶长;
B——浆桶宽;
Dh——线性区域的液位差;
ti——线性区域注浆泵活塞注入次数。
当浆液液位在非线性区域时,实际注浆量:

式中:j——非线性区域注浆泵活塞注入次数。

图4 激光测距仪校验活塞腔实际注浆量
5 同步注浆实际注入量动态校验检测功能实现
5.1 激光测距仪
选用德国易福门公司的 O1D155 型激光测距传感器,测量范围 0.1~6 m,输出 4~20 mA 电流,波长 650 nm,光斑直径 <8 mm。外壳防护等级 IP67。
5.2 PLC接口
三菱 Q 系列 64AD 模拟量远程模块作为盾构 PLC 的IO 接口,通过 CCLINK 总线与盾构 PLC 的 CPU 通信。
5.3 初始条件
(1) 标定:实测激光测距仪安装位置至浆桶底部距离为c,激光传感器信号为 laser,则液位 h=c-laser。
设 h1为 非线性区域上沿。
(2) 一环开始条件:
If 环号差≥1 and 螺旋机运转
ho= c-laser‘ho为本环液位初始值
置环号差=0
sta=0 ‘置状态变量=0
5.4 判断逻辑
If h>h1如果液位高于非线性区域上沿
Vr=v0= ab*(h0-h), sta=0 实际注入量为长宽液位差乘积
If h<h1and sta=0 如果液位在非线性区域上沿
Vs=abDh/∑ti, sta=1 求单次注浆体积,只做一次。
If h<h1and sta=1 如果液位在非线性区域下沿
Vr=v0+ Vs*∑tj由活塞实际浆液容积计算注浆体积
其中 Vr是本环同步注浆实际注入的量。
5.5 工程应用及效果
2016 年 9 月,盾构同步注浆实际注入量的动态校验检测技术在上海轨交 17 号线 3 标漕盈路到风井下行线进行工程应用。
表2 记录了盾构同步注浆实际注入量的动态校验检测技术在上海轨交 17 号线 3 标漕盈路站到风井下行线 1 406环到 1 410 环的数据。表 2 第 6 行反映了注浆泵活塞效率(占空比)。数据反映这连续 5 环掘进过程中,在浆液配比、施工环境、注入速度等近似条件下注浆泵效率略有差异,但总体比较接近。

表2 同步注浆工程应用数据样本
6 结 语
盾构同步注浆实际注入量的动态校验检测技术,解决了注浆泵活塞计数随机性占空比的技术难题,提高了同步注浆实际注入量检测结果的置信度。这对提高同步注浆施工质量起到积极的促进作用。
TU50
A
1674-814X(2017)02-0021-04
2016-12-20
郝震宇,现供职于上海地铁盾构设备工程有限公司。主要从事隧道施工、盾构及相关设备设计、改造工作。曾参与上中路隧道、沪崇苏隧道、虹梅南路隧道等多项工程工作。作者通信地址:上海徐汇区淮海中路1298号 ,邮编:200031。
猜你喜欢
石油工业技术监督(2022年7期)2022-08-18
农业工程技术(2022年1期)2022-04-19
中学生学习报(2022年15期)2022-04-17
中国铸造装备与技术(2017年6期)2018-01-22
电子制作(2017年1期)2017-05-17
汽车维护与修理(2015年2期)2015-02-28
创新科技(2014年14期)2014-07-27
自动化博览(2014年12期)2014-02-28
汽车与新动力(2014年5期)2014-02-27
汽车与新动力(2014年4期)2014-02-27
