
高速道路交通视频中车辆目标提取研究*
2017-11-01 07:19刘凯雄李玉惠刘加运
传感器与微系统 2017年10期
刘凯雄, 李玉惠, 李 勃, 刘加运,
(1.昆明理工大学 信息工程与自动化学院,云南 昆明 650500;2.云南省智能交通系统工程技术研究中心 智能图像处理研究室,云南 昆明 650500)
高速道路交通视频中车辆目标提取研究*
刘凯雄1,2, 李玉惠1,2, 李 勃1,2, 刘加运1,2,
(1.昆明理工大学信息工程与自动化学院,云南昆明650500;2.云南省智能交通系统工程技术研究中心智能图像处理研究室,云南昆明650500)
为了能够从监控视频中快速、准确地分析车辆目标,提出了基于感兴趣区域(ROI)的车辆目标提取方法。针对高速公路监控视频,利用混合高斯背景建模,在视频中划定ROI,以排除逆向车道车辆目标的影响,应用图像形态学进行干扰点排除与前景图像轮廓空洞填充,对运动车辆目标进行检测后,用最小矩形方框法自动截取目标,最终,通过图像尺度归一化建立车辆样本数据库,为车型分类和识别提供目标图像。实验结果表明:该方法对车辆目标提取准确率高,且图像数据库样本丰富。
混合高斯背景建模; 感兴趣的区域; 背景差分法; 最小矩形; 车辆目标提取
0 引 言
目前,关于车辆识别和分类大量实验图像样本库的建立都是以人工截取建立的数据库,任务量大,消耗人力且成本又高;同时,为了辅助公安及交警部门进行车辆目标的识别与轨迹分析等执法办案。本文利用计算机图像处理技术,针对道路交通视频的智能化设计的车辆目标最优化自动提取的实验研究,实现自动截取最优车辆目标图像并保存,建立样本数据库,对车辆目标进行分类和识别[1,2]。
1 实验整体方案设计
基于高速道路交通视频中车辆目标提取系统是针对视频中进行混合高斯模型进行背景训练,通过划定视频中的感兴趣的区域(region of interest,ROI),排除逆向车道的车辆影响,同时,对车辆目标最优化的界定,背景差分法是获取车辆目标在图像中位置的关键步骤,最后对前景图像以最小矩形的方法框定车辆目标[3],(最大化地获取车辆目标,同时最小化图像中背景图像的干扰。)截取保留到指定文件夹中,最后通过图像尺度归一化将图像保存,建立车辆目标的数据样本库。总体流程如图1所示。
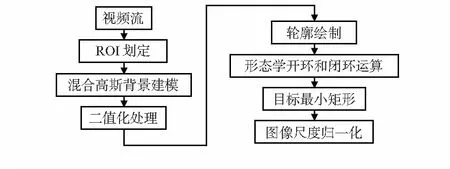
图1 车辆目标提取实验流程
2 实验流程与原理
2.1 视频中的ROI提取
首先,对视频图像序列中设定了一个ROI定义车辆目标提取相关图像处理域,以避免反向车道车辆的影响,同时,可以减少图像处理的计算量,从而降低提取的时间复杂度,提高处理效率。
目前的研究方法是通过设置一条虚拟检测线进行后续的处理[4],在实际实验中,如果反向车道的车辆也在视频ROI内运动,则通过再设置两条由两个端点各自向车辆运动方向的反向延伸的线段,即再设置两个端点坐标P3(x3,y3),P4(x4,y4),与虚拟检测线设置的两个端点构成三条线段,两条边界线与虚拟检测线形成“凹形框”,划定车辆的行驶方向,可以避免反向车道内的车辆的影响,提高提取效率和准确率。虚拟检测线与两条边界线构成的直线方程为:
虚拟检测线
Ax+By+C=0
(1)
左边界线
A1x+B1y+C1=0
(2)
右边界线
A2x+B2y+C2=0
(3)
2.2 基于混合高斯背景建模算法
实现对车辆目标的检测时首先要进行道路卡口的混合高斯背景建模,背景建模效果直接影响着运动目标检测算法性能。混合高斯模型建模是目前主流背景建模的方法,运行时间短,复杂度低,详细算法流程如图2所示。
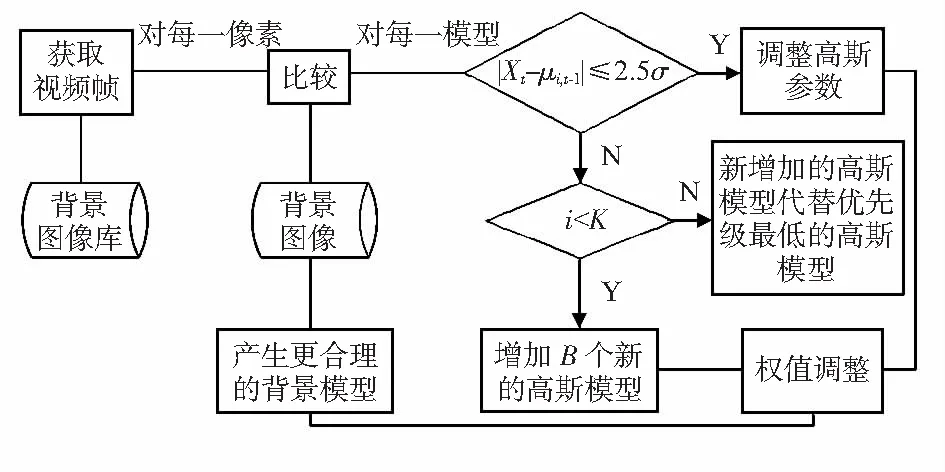
图2 混合高斯模型算法流程
混合高斯背景建模算法原理:
1)任意一个新像素Xt同当前K个模型按式(4)进行匹配,直到找到匹配新像素值的分布模型,均值偏差x≤2.5σ
|Xt-μi,t-1|≤2.5σi,t-1
(4)
2)若所匹配的模式符合背景,则该像素属于背景;否则,m属于前景(运动目标)。
3)各模式权值按式(5)更新,其中,α为学习速率,对于匹配的模式Mk,t=1;否则,Mk,t=0。然后,对各模式的权重进行归一化
wk,t=(1-α)wk,t+αMk,t
(5)
4)未匹配模式的均值μ与标准差σ保持不变,匹配模式的各参数进行更新
ρ=αη(Xt|μk,σk)
(6)
μt=(1-ρ)μt-1+ρXt
(7)
(8)
5)若步骤(1)中没有任何模式匹配,则权重最小的模式被替换,即该模式的均值为当前像素值,标准差为初始较大值,权重为较小值。
6)各模式根据w/α2按降序排列,权重大、标准差小的模式排列先前。
7)选前B模式作为背景,B满足式(9),参数T为背景所占百分比
(9)
2.3 背景差分法
背景差分法是采用图像序列中的当前帧和背景参考模型比较来检测运动物体的一种方法,其性能依赖于所使用的背景建模技术[5],具有检测运动目标速度快且结论相对准确,易于实现。系统采用了背景差分法,在建立混合高斯背景模型后,运用背景差分法,通过形态学处理可实现对车辆目标轮廓空洞填充,消除微小背景及水印干扰点,实现车辆目标检测得到前景图像及车辆轮廓,如图3所示。
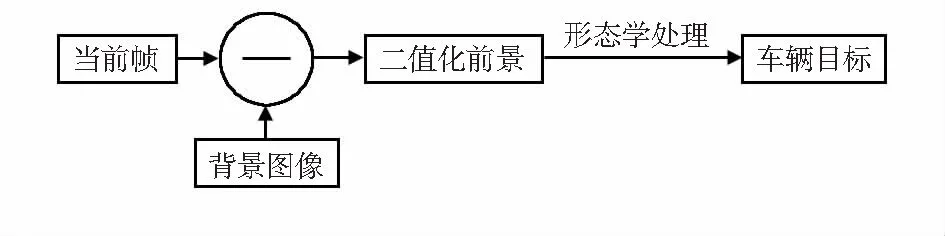
图3 背景差分法的处理流程
2.4 车辆目标的最小矩形
最小外接矩形是指以二维坐标表示的若干二维形状(例如点、直线、多边形)的最大范围,即以给定的二维形状各顶点中的最大横坐标pt[2]、最小横坐标pt[0]、最大纵坐标pt[3]、最小纵坐标pt[1]定下边界的矩形。一个矩形包含给定的二维形状,且边与坐标轴平行。最小外接矩形是最小外接框的二维形式,如图4所示。
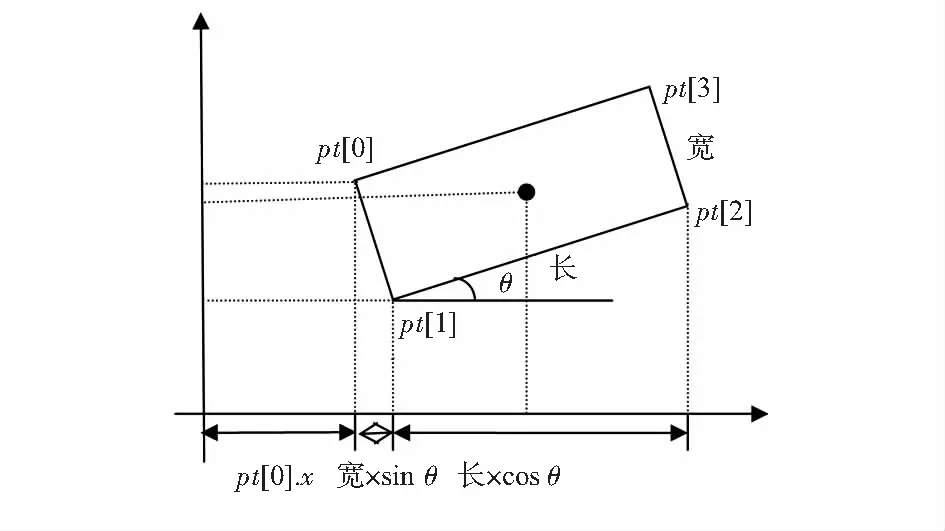
图4 最小矩形二维形式
2.5 车辆图像尺度归一化
由于道路视频分辨率存在的差异使得车辆对象图像的大小不同,不同卡口摄像机拍摄到的同一车辆对象的尺寸大小通常不一样。车辆尺寸的不一致增加了对后续车型的识别误差。为了减小图像尺度不一对部分车辆识别和分类分析的影响,在提取车辆对象后需要对图像进行归一化处理。本实验采用区域插值法:1)利用图像的纹理复杂度,将图像划分成不同的区域;2)根据采样点在原图像中的区域位置,利用区域插值方法构造采样点。
3 实验结果分析
为了测试本文算法的性能,实验采用云南省高速道路某卡口的视频帧序列,视频ROI的划定采用人工鼠标事件进行4个坐标点的标准[8],效果如图5所示。

图5 车辆目标提取过程
对于视频中提取到的车辆目标可根据具体后续实验的需求,设定归一化的尺寸,实验中对车型分类进行了64×64的归一化处理,实验结果如图6所示。
最后,对同一视频提取车辆目标的实验结果进行数据分析,正确率=(提取到的车辆目标数—提取到的重复目标数)/ 总车辆数。实验视频帧序列中总车辆数为241辆,提取到232辆,重复提取13辆。因此,本次实验提取车辆目标的正确率为90.87%。
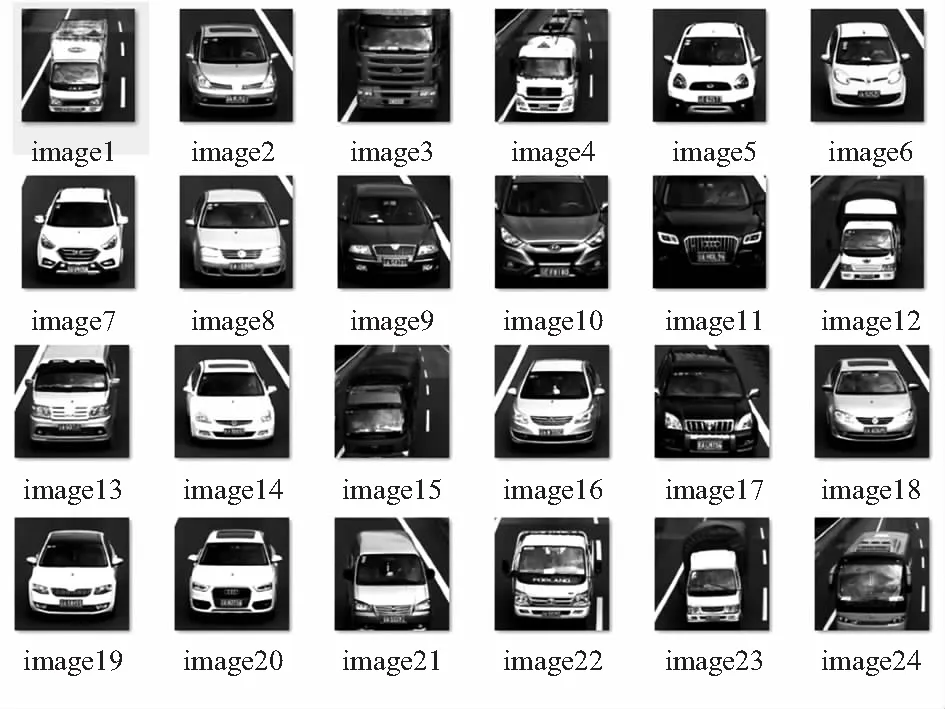
图6 归一化处理后车辆图像样本
4 结束语
本文提出了基于视频中ROI的最优化车辆目标的自动提取系统的实现原理与过程,运用混合高斯模型进行背景建模景差分法对图像中的每个像素建立多个高斯模型,有效克服了白噪声、字幕、树叶周期性抖动的影响,对监控视频中车辆对象提取保留了对象车辆的相对完整性,同时,对不同尺寸的车辆目标图像进行归一化处理,以消除对后续车型分类和识别的影响。实验结果表明:该系统有效地解决了高速道路监控视频中车辆目标的提取及样本库的建立,可应用于实际道路视频监控工作中。
[1] Li Zhihua,Zhou Fan,Tian Xiang ,etc.High efficient moving object extraction and classification in traffic video surveillance[J].Journal of Systems Engineering and Electronics,2009,20(4):858-868.
[2] 缪小冬,李舜酩,沈 峘,等.路面车辆的视觉检测方法[J].传感器与微系统,2010,29(2):5-8,12.
[3] 朱 炼,孙 枫,夏芳莉,等.图像融合研究综述[J].传感器与微系统,2014,33(2):14-18.
[4] 夏 洁,吴 健,陈建明,等.基于虚拟检测线的交通视频关键帧提取[J].苏州大学报:工科版,2010(2):1-11.
[5] 屈晶晶,辛云宏 .连续帧间差分与背景差分相融合的运动目标检测方法[J].光子学报,2014,43(7):1-8.
Researchonvideovehicleobjectextractionbasedonhigh-speedroadtraffic*
LIU Kai-xiong1,2, LI Yu-hui1,2, LI Bo1,2, LIU Jia-yun1,2
(1.SchoolofInformationEngineeringandAutomation,KunmingUniversityofScienceandTechnology,Kunming650500,China;2.IntelligentImageProcessingResearchCenterofIntelligentTransportationSystemEngineeringTechnologyResearchCenterofYunnanProvince,Kunming650500,China)
In order to analyze on vehicle target from the surveillance video quickly and accurately,vehicle target extraction method based on region of interest (ROI) area is proposed.Aiming at highway surveillance video,use Gaussian mixture background for modeling,draw ROI area invideo,to eliminate the influence of the reverse drive vehicle target,by method of image morphology for eliminating interference points and image contour cavity filling,after detecting vehicle moving target automatically intercept target with minimum rectangular box method,and finally build vehicles sample database by normalized image scale,provide target image for vehicle classification and recognition.The experimental results show that extraction accuracy of vehicle target by the method is high,and be able to rich the image database sample.
Gaussian mixture background modeling; region of interest(ROI) area; background difference method; the smallest rectangle; vehicle target extraction
10.13873/J.1000—9787(2017)10—0035—03
2016—08—12
国家自然科学基金资助项目(61363043)
TN 919
A
1000—9787(2017)10—0035—03
刘凯雄(1990-),男,硕士研究生,主要研究方向为智能图像处理。李玉惠,通讯作者,E—mail:1484946977@qq.com。
猜你喜欢
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
数学年刊A辑(中文版)(2020年2期)2020-07-25
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
中学生数理化·七年级数学人教版(2019年4期)2019-05-20
智富时代(2018年12期)2018-01-12
智富时代(2018年12期)2018-01-12
中学生数理化·八年级数学人教版(2017年4期)2017-07-08
电影故事(2015年16期)2015-07-14
物探化探计算技术(2015年2期)2015-02-28
