基于内模控制的Smith反向解耦控制器设计
2017-11-01 06:12:35王元飞张晓静贾玉明
化工自动化及仪表 2017年9期
王元飞 张晓静 贾玉明
(海工英派尔工程有限公司自控室)
基于内模控制的Smith反向解耦控制器设计
王元飞 张晓静 贾玉明
(海工英派尔工程有限公司自控室)
针对多变量时滞系统提出了一种基于内模控制(Internal Model Control,IMC)的Smith动态解耦控制器设计方法。其中,Smith补偿器被应用在该控制结构中,包含带有时滞项和不带时滞项的补偿结构,以解决不能完全补偿的问题,通过反向解耦设计实现多变量时滞系统动态解耦。多变量系统被解耦成一系列互相独立的单回路对象,通过内模控制原理对Smith控制器进行参数整定,并分析了系统的鲁棒性。仿真实例表明了该方法的有效性,能够较好地克服系统参数扰动导致的干扰,并具有较好的动态性能。
反向解耦 内模控制 Smith补偿 多变量系统 时滞
现代工业过程大多以多变量系统形式存在,并有着大滞后特性[1,2],例如化工蒸馏塔,而大滞后特性的存在增加了系统的不稳定性,使得控制设计变得更为困难。针对多变量特性,传统的分布式控制采用一系列独立的控制器,将多变量系统主回路对象考虑在内,往往不能在动态响应过程中消除控制回路之间的耦合,而无法获得较好的控制特性[3,4]。基于此,集中式解耦控制器的研究变得更加迫切。
集中式解耦控制器按照过程解耦中是否考虑动态响应分为两类:静态解耦和动态解耦。静态解耦在系统有着强耦合特性时,动态响应中耦合依然明显存在[5~7],而动态解耦方法可以很好地解决此问题。Gagnon E等讨论了一系列的动态解耦控制方法[8],其中包括理想解耦、反向解耦等,但对于大滞后系统的控制表现不佳;Wang Q等设计了一种基于内模控制的集中式控制器[9],动态过程被充分考虑,然而大滞后影响仍未消除;Liu T等基于理想传递函数提出了一种反向解耦结构的控制方法[10],详细分析了该方法的系统鲁棒性,该方法设计较为简单,且能够获得较好的解耦效果;Kumar V V等提出了一种直接设计方法[7],其中过程的逆函数可以近似得到,但由于高阶的存在,工程中较难实现;王富强等针对时滞多变量系统高阶设计的复杂性[11],提出了一种基于模型降解的解耦控制方法,降低了设计难度,但同时降解所带来的误差也影响了系统解耦效果;Raviteja K等为解决不稳定系统TITO提出了一种基于改进ETF(Equivalent Transfer Function)的解耦控制方法[12],而此方法并非直接设计方法,依然会带来控制误差。
在消除多变量系统耦合的同时,为了解决多变量系统时滞带来的控制不稳和滞后问题,时滞多变量系统Smith静态解耦控制取得了不少成果[13~15],但无法有效地补偿时滞项带来的影响。Smith动态解耦控制并没有取得多少研究进展,其原因在于不能很好地对系统时滞项进行完全补偿。笔者提出了一种新的补偿方法,在Smith控制结构的基础上,采用反向解耦对大时滞特性进行了完全的补偿控制,并能够获得较好的解耦效果,通过内模控制方法整定系统PID参数。
1 Smith完全补偿设计
Smith完全补偿结构如图1所示,C(s)为Smith控制器,Gp(s)和Gm(s)分别为m阶(m×m)系统过程函数和系统模型函数。

图1 Smith完全补偿控制结构
假设解耦器K(s)能够将过程解耦为下式:
Gp(s)K(s)=Qi(s)=diag{q1(s)e-τ1s,q2(s)e-τ2s,…,qm(s)e-τms}
(1)
其中,qi为不含有滞后项的正定传递函数。要能够对时滞项进行完全补偿则必须达到以下条件:

(2)
则当系统模型匹配时,即Gp(s)=Gm(s),系统最终传递函数为:

(3)
选定反向解耦器K(s)结构如图2所示。

图2 反向解耦器结构
计算解耦器K(s):
K(s)=Kd(s)[I(s)-Ko(s)Kd(s)]-1
(4)
最终控制器输出C(s)与系统输出Y(s)的关系为:
Y(s)=G(s)K(s)C(s)
(5)
式(5)中,令Q(s)=G(s)K(s),Q(s)被定义为系统的广义传递函数,因此,容易通过其逆形式得到K(s)为:
K(s)=G-1(s)Q(s)
(6)
为方便计算,由式(4)取其逆并将它代入式(6)中得到:
Kd-1(s)-Ko(s)=Q-1(s)G(s)
(7)
通过确定理想传递函数Q(s),由式(7)可方便得到反向解耦器形式。由于反向解耦器的特殊形式,解耦器可使得理想传递函数正定部分和纯滞后部分分开处理,这是实现Smtih完全补偿的重要条件。
2 控制器设计与性能分析
考虑到IMC控制器设计的简易性,可得出Smith控制器与IMC控制器之间的转换关系,从而得出Smith控制器的形式。针对控制器参数整定,考虑不确定性下系统的鲁棒性能,并对它进行计算分析。
2.1 控制器设计
Smith控制器是在系统被解耦为理想传递函数的情况下设计,系统各回路之间不存在耦合关系,因此Smith控制器与IMC控制器的等效关系为:
(8)

依据内模设计原理,IMC控制器为:
(9)
其中,Qii-(s)不含有右半平面极点和时滞部分,即正定部分;阶次n最小值为IMC控制器实现有理的取值;滤波器参数λi影响系统一般性能和鲁棒性能,其值的选取应平衡上述性能指标。
当系统模型匹配时,第i回路Smith控制器为:

(10)
在现实工况中,为了保证系统鲁棒稳定性和系统性能的平衡,参数λ一般以逐渐增大的方式来选取,故将系统加性不确定性考虑在内,如图3所示。

图3 系统加性不确定性结构

(11)


(12)
2.2 性能分析

(13)
依据小增益定理,在无法具体表述不确定形式时,采取最大奇异值倒数指标:


(14)
式即系统鲁棒稳定性能指标RS,而系统鲁棒性能指标RP表述如下:

(15)
(16)
其中S(s)表示系统灵敏度函数,式(16)的成立保证了系统的内部稳定性,且可求出最大可承受干扰。
3 实例仿真
对于经典TITO的Wood-Berry模型:
选定广义对象传递函数如下:
针对广义对象,设计的简化Smith控制器如下:

其中纯滞后项用一阶泰勒近似。为整定滤波器参数λ,计算不同参数下式(11)在各频率下的最大奇异值,计算结果如图4所示。考虑系统跟踪性能、超调量等一般性能和系统鲁棒性能的平衡,选取滤波器参数λ1=λ2=5。
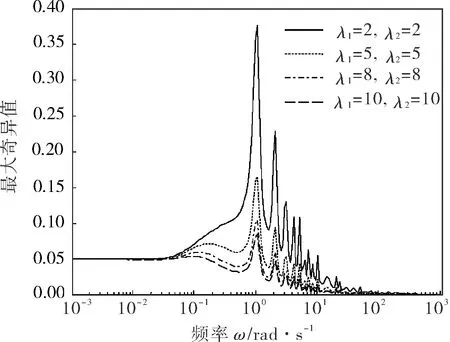
图4 加性不确定性下最大奇异值
图5为系统模型匹配时输入为单位阶跃信号系统输出和控制器输出仿真图像,单位阶跃时间分别在t=10s和t=100s,为比较设计方法的优越性,将另外两种方法[5, 17]与笔者所提方法进行比较。从图5中可以看出,笔者所提方法能够获得更好的动态跟踪响应,在克服大滞后存在的同时,动态解耦效果显著。
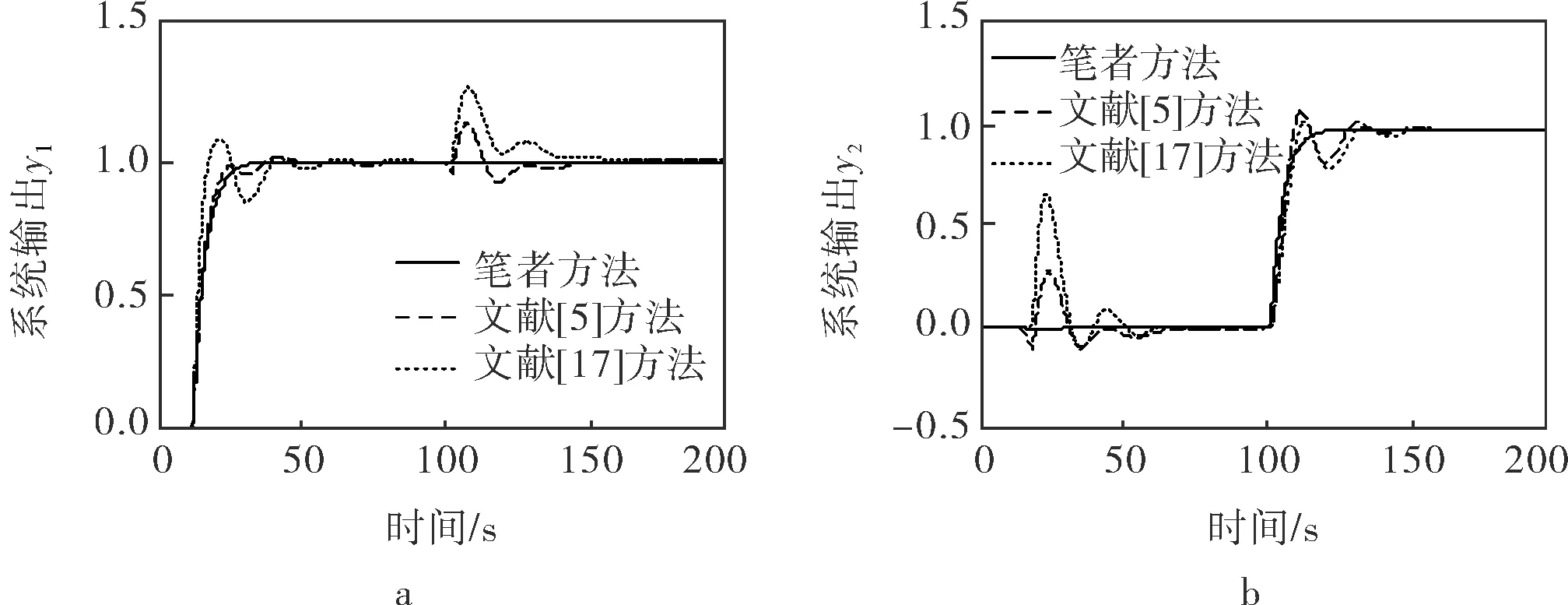

图5 模型匹配时系统和控制器输出
为评价系统鲁棒稳定性和鲁棒性能,分别就输入不确定性、输出不确定性和灵敏度函数通过式(14)、(15)仿真各频率下最大奇异值倒数(图6)。从图6中可以看出,在两种不确定情况下,系统均能够保证很好的鲁棒稳定性,求得其稳定裕度分别为70.3%和100%,针对灵敏度函数其裕度为72.0%。
为更加清楚地展示系统的鲁棒性能,系统增益和纯滞后时间均有+30%的摄动,而-30%系统参数摄动加于时间常数。由图7可以看出,笔者设计的方法在系统失配时更能够保证系统的动态性能,这足够证明了该设计方法拥有较好的鲁棒性能。
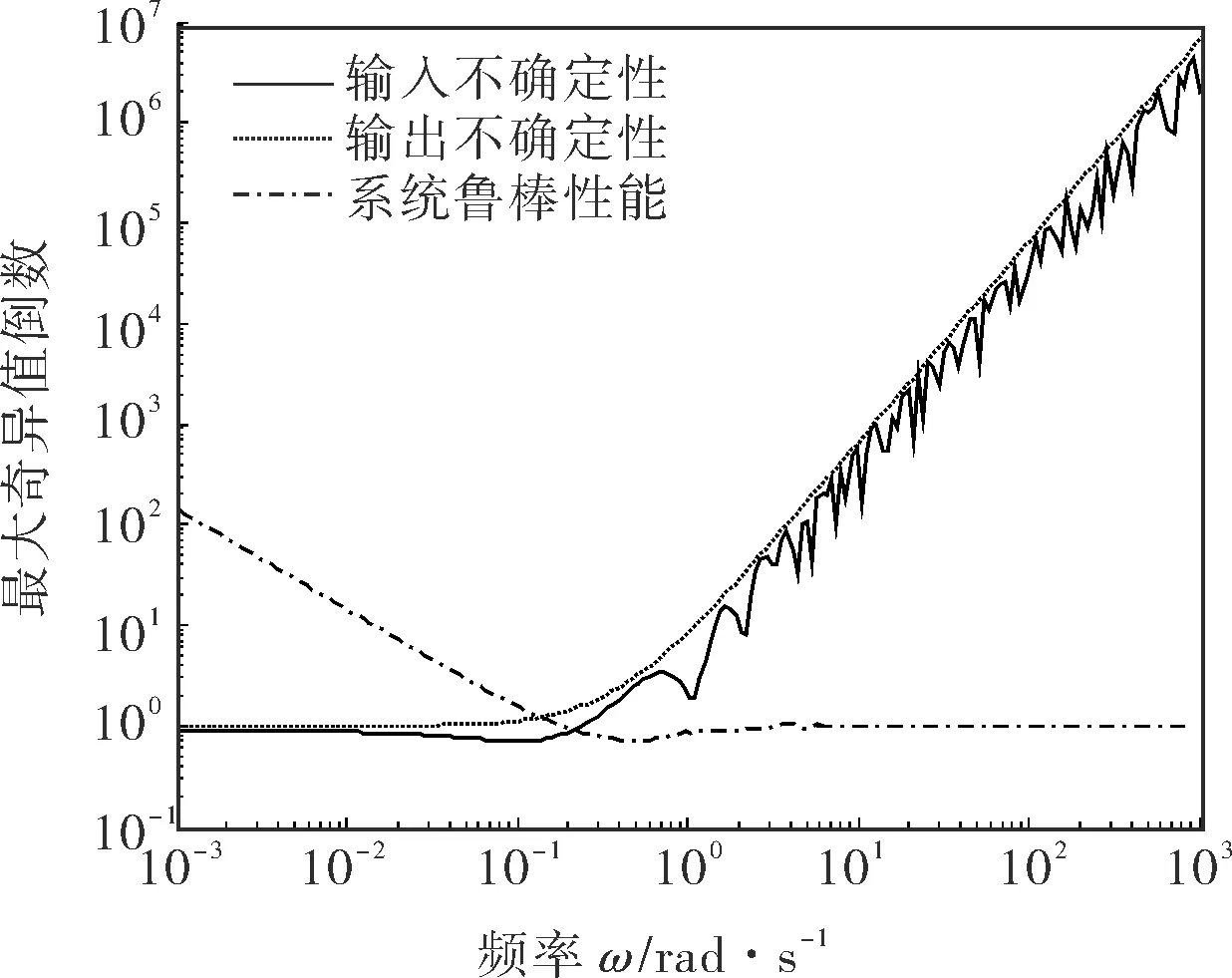
图6 各不确定性下最大奇异值倒数

图7 模型失配时系统和控制器输出
为综合比较3种方法的性能指标,系统超调量、上升时间、ISE和IAE计算结果见表1。

表1 各指标数值 (标配/失配)
4 结束语
设计了一种基于反向解耦的Smith完全补偿控制结构,通过将系统不带时滞项和时滞项分离,能够消除Smith控制时动态解耦不完全产生的误差。控制器参数通过内模原理进行整定,易于计算,并就动态性能和鲁棒性能进行了系统性分析,给出了实例仿真。笔者所提方法在消除多变量系统耦合的同时,保证了系统的动态性能和鲁棒性能的平衡,仿真证明了方法的有效性。
[1] Alatiql I M, Luyben W L.Control of a Complex Sidestream Columnstripper Distillation Configuration[J]. Ind Eng Chem Process Des Dev, 1986, 25(3): 762~767.
[2] Ogunnaike B A, Lemaire J P, Morari M, et al. Advanced Multivariable Control of a Pilot-Plant Distillation Column[J]. AICHE Journal, 1983, 29(4): 632~640.
[3] Nordfeldt P, Hagglund T. Decoupler and PID Controller Design of TITO Systems[J]. Journal of Process Control, 2006, 16(9): 923~936.
[4] Maghade D K, Patre B M.Decentralized PI/PID Controllers Based on Gain and Phase Margin Specifications for TITO Processes[J]. ISA Transactions, 2012, 51(4): 550~558.
[5] Lee J, Dong H K, Edgar T F. Static Decouplers for Control of Multivariable Processes[J]. AICHE J, 2005, 51(10): 2712~2720.
[6] Qiang X, Wen J C, Mao J H. Equivalent Transfer Function Method for PI/PID Controller Design of MIMO Processes[J]. Journal of Process Control, 2007, 17(8): 665~673.
[7] Kumar V V, Rao V S R, Chidambaram M.Centralized PI Controllers for Interacting Multivariable Processes by Synthesis Method [J]. ISA Transactions, 2012, 51(3): 400~409.
[8] Gagnon E, Pomerleau A, Desbiens A. Simplified, Ideal or Inverted Decoupling[J]. ISA Transactions, 1998, 37(4): 265~276.
[9] Wang Q,Zhang Y,Chiu M. Decoupling Internal Model Control for Multivariable Systems with Multiple Time Delays[J]. Chemical Engineering Science, 2002, 57(1): 115~124.
[10] Liu T, Zhang W, Gao F.Analytical Decoupling Control Strategy Using a Unity Feedback Control Structure for MIMO Processes with Time Delays[J]. Journal of Process Control, 2007, 17(2): 173~186.
[11] 王富强, 李晓理, 张秋生,等. 基于模型降阶的时滞多变量系统动态解耦[J]. 控制工程, 2015, 22(4): 639~644.
[12] Raviteja K, Purushottama R D,Rao A S. Improved Controller Design for Two-Input-Two-Output(TITO) Unstable Processed[J]. Resource-Efficient Technologies, 2016, 2(3): 76~86.
[13] Chen J, He Z F,Qi X. A New Control Method for MIMO First Order Time Delay Non-Square Systems[J]. Journal of Process Control, 2011, 21(4): 538~546.
[14] Santos T L M, Bismark C T, Julio E N. Simplified Filtered Smith Predictor for MIMO Processes with Multiple Time Delays[J]. ISA Transactions, 2016, 65:339~349.
[15] Raja G L, Ahmad A. Smith Predictor Based Parallel Cascade Control Strategy for Unstable and Integrating Processes with Large Time Delay[J]. Journal of Process Control, 2017, 52: 57~65.
[16] Skogestad S, Postlethwaite I. Multivariable Feedback Control:Analysis and Design[M]. New York:Wiley, 2007.
[17] 陈强, 栾小丽, 刘飞.高维多变量时滞系统多环PI控制的解析设计[J].信息与控制, 2014, 43(2):205~210.
[18] Lee J, Kim D H, Edgar T F. Static Decouplers for Control of Multivariable Processes[J].AICHE Journal, 2005, 51(10):2712~ 2720.
SmithInvertedDecouplingControllerDesignBasedonInternalModelControl
WANG Yuan-fei, ZHANG Xiao-jing, JIA Yu-ming
(ControlDept.,COUEC-EnpalEngineeringCo.,Ltd.)
The design of dynamic Smith decoupling controller based on internal model control (IMC) was proposed for the multivariable system with time-delays, in which, Smith compensator with and without the delay terms was employed for the control scheme and to solve incomplete compensation; and through the reverse decoupling design, the dynamic decoupling of the multivariable system with time-delays can be realized. Having the multivariable system decomposed into a set of mutually independent single loops and having IMC theory based to set parameters of Smith controller were implemented, including analysis of system robustness. Simulation examples demonstrate the effectiveness of the proposed approach, and it can eliminate the disturbance incurred by the system parameter perturbation together with good dynamic property.
inverted decoupling, IMC, Smith compensation, multivariable system, time delay
TP273
A
1000-3932(2017)09-0830-06
2017-03-21,
2017-04-18)
王元飞(1989-),助理工程师,从事复杂系统控制与设计、化工自控系统设计以及系统安全评估工作,youyou7003@126.com。
猜你喜欢
数学物理学报(2020年5期)2020-11-26 06:06:48
测控技术(2018年7期)2018-12-09 08:58:46
光学精密工程(2016年4期)2016-11-07 09:05:39
四川电力技术(2015年5期)2015-12-19 11:04:52
电测与仪表(2015年16期)2015-04-12 00:44:32
电测与仪表(2015年20期)2015-04-09 11:53:56
电测与仪表(2015年21期)2015-04-09 11:52:12
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:40
应用数学与计算数学学报(2014年3期)2014-09-26 12:03:52
电测与仪表(2014年11期)2014-04-04 09:21:20