基于LQ优化的磁悬浮输出反馈控制器设计
2017-10-23 01:00韩家乐李保龙
河南工程学院学报(自然科学版) 2017年3期
薛 鹏,韩家乐,李保龙
(河南工程学院 电气信息工程学院,河南 郑州 451191)
基于LQ优化的磁悬浮输出反馈控制器设计
薛 鹏,韩家乐,李保龙
(河南工程学院 电气信息工程学院,河南 郑州 451191)
磁悬浮球系统具有非线性的本质和明显的开环不稳定特点,其控制算法值得研究.虽然输出反馈PID控制方案因简单易行而被广泛应用,但其参数整定依赖经验导致控制精度不高且容易受到干扰而使控制失败.保持输出反馈的控制结构,提出将LQ二次优化方法用于控制参数优化的整定方案,优点在于使系统具有统一的最优解表达式,计算方便;将状态信息用于控制器设计,提高了输出反馈的控制性能,避免了状态采样的复杂计算.将所提方案与经典PID方案比较,仿真结果显示,具有LQ优化的输出反馈控制方案跟踪效果好且对外部干扰和内部参数摄动的敏感度有所降低.
磁悬浮;输出反馈;LQ优化;鲁棒性
磁悬浮技术的研究涉及电磁、力学、机械和控制工程等多个学科.磁悬浮球装置是典型的非线性控制系统,同时具有开环不稳定特点[1-2].控制对象的处理过程中,通常将非线性模型在其平衡点处进行泰勒展开得到线性化模型以进行算法设计,故所设计的控制器只能在系统平衡点附近的小范围内产生控制效果.一旦悬浮对象受到外部干扰,被悬浮对象将偏离平衡点,系统的非线性本质将导致悬浮控制失败.因此,研究磁悬浮系统的控制算法具有重要意义[3].
磁悬浮球试验装置多采用输出反馈PID控制,研究者提出了各种先进智能PID控制参数整定方法以优化系统控制性能,比如针对模型不确定性的BP网络的控制参数优化[4]、模糊PID[5]、鲁棒PID[6]等.LQ二次最优控制是基于时域状态空间描述的系统设计方法,优点在于最优解的统一表达且便于计算,但是控制器要求反馈所有的状态信息,这在工程中有时是无法实现的.尽管可以用状态观测器进行状态重构,但这种方法增加了系统的复杂性、降低了系统的可靠性,如果设计不当还可能引入干扰,影响原系统的动态性能.
通过分析输出反馈与状态反馈之间的联系,将LQ优化设计方法引入PID控制参数的整定过程,提出了基于状态反馈的PID参数整定方法,使得PID控制实现了线性二次最优的控制效果,既避免了复杂的状态采样,又提高了输出反馈的控制性能.试验分析以Matlab/Simulink为工具,比较了所提方案与传统PID控制方案的效果,尤其比较了外部干扰和内部参数摄动时的悬浮控制特性,验证了本方案的有效性.
1 磁悬浮装置动态模型
在系统建模时做以下简化:假设电磁铁芯无磁滞现象,磁通全部无漏磁地贯穿铁芯,同时假设磁场在铁芯和气隙中都是均匀分布的,当被悬浮对象在平衡点处做小幅变化时,可将其视为线性的动态过程.
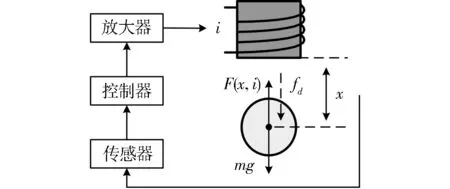
图1 悬浮装置原理分析Fig.1 Principles of magnetic levitation
以悬浮球为对象进行刚体受力分析,如图1所示.图1中,m为钢球的质量,x表示电磁铁与刚体之间的距离,i为电磁铁绕组中的电流,F(x,i)表示线圈通电时刚体所受的电磁力,fd(t)表示系统所受的干扰力.
根据牛顿第二定律,可得刚体球的运动方程:
(1)
式(1)中的电磁力F(x,i)与气隙x的平方成反比关系,有

(2)
当电磁吸引力和被悬浮对象的重力相等时,系统处于平衡状态,记平衡点为(x0,i0),此时有边值条件
F(x0,i0)=mg.
(3)
将电磁吸引力F在平衡点处进行泰勒展开,忽略高阶无穷小量,得
F(x,i)=F(x0,i0)+kx(x-x0)+ki(i-i0),
(4)

将式(4)代入式(1),整理可得
(5)
分别用L和R表示电磁铁的电磁感应系数和阻抗,可得电磁线圈的电路方程为

(6)
这里,u0和u(t)分别表示平衡电压和电压调节增量.由于在平衡点处有边值条件Ri0=u0,进而
(7)
联立式(5)和式(7)可得悬浮系统的线性化模型为
(8)

(9)
2 控制器参数的优化整定
2.1经典输出反馈控制
控制系统中,最常用的控制规律是PID控制.它是一种线性控制器,根据给定值与实际输出值构成控制偏差,将偏差的比例、积分和微分通过线性组合构成控制量,对被控对象进行控制,其控制规律写成传递函数为
(10)
式中:Kp为比例系数;Ti为积分时间常数;Td为微分时间常数.
PID控制器各校正环节的作用如下:①比例环节,成比例地反映控制系统的偏差信号,有偏差存在,控制器立即产生控制作用,以减少偏差;②积分环节,主要用于消除静差,提高系统的静态无差度,积分作用的强弱与积分时间常数成反比;③微分环节,反映偏差信号的变化趋势,利用系统偏差引入早期修正信号,加快系统的反应速度,减少调节时间.
2.2状态优化的输出反馈
进一步讨论式(10)所示PID控制器的参数整定问题.通过对比状态反馈与输出反馈的控制结构,将时域的性能指标优化方法用于频域的校正环节设计.两种控制方法的结构如图2所示.
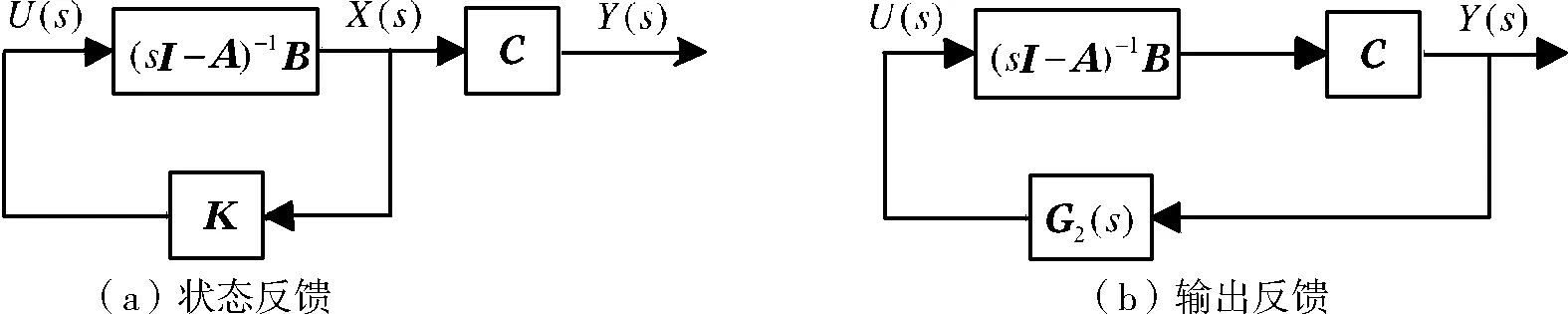
图2 状态反馈与输出反馈结构对比Fig.2 Comparison of state feedback and output feedback structure
对于能控能观的线性定常系统
(11)
边值条件x(t0)=x0,指定二次型性能指标
(12)
式中:u(t)为控制变量;A,B,C,Q,R为适当维数的常数矩阵,其中Q和R为正定对称矩阵.
那么,最优控制存在且唯一的表示为
u(t)=-R-1BTPx(t),
(13)
式中:P是Riccati方程PA+ATP-PBR-1BTP+Q=0的非负定对称解.线性定常最优控制可通过对状态的线性定常反馈来实现,反馈控制增益为K=-R-1BTP.
因输出量可以直接测量,实际工程中输出反馈被广泛应用.为了使系统达到所要求的性能指标,需要引入串联的PID控制器.下面讨论两种控制方法的内在联系.
在零初始状态下,对式(11)进行拉氏变换,可得

(14)
施加状态反馈控制,状态空间描述系统的频域结构由图2(a)表示,故系统的闭环传递函数矩阵为
(15)
图2(b)所示为对象的PID闭环控制结构,系统的闭环传递函数矩阵为
(16)
若要PID控制具有和LQR控制相同的动态性能,令它们的传递函数矩阵相等,可得PID控制器的传递函数矩阵为
(17)
基于系统的时域状态空间描述,由线性二次最优控制算法可以得到反馈增益K,根据式(17)便可得到控制矩阵G2(s),这就得到了一种从时域最优状态反馈进行PID控制器参数优化的设计方法.
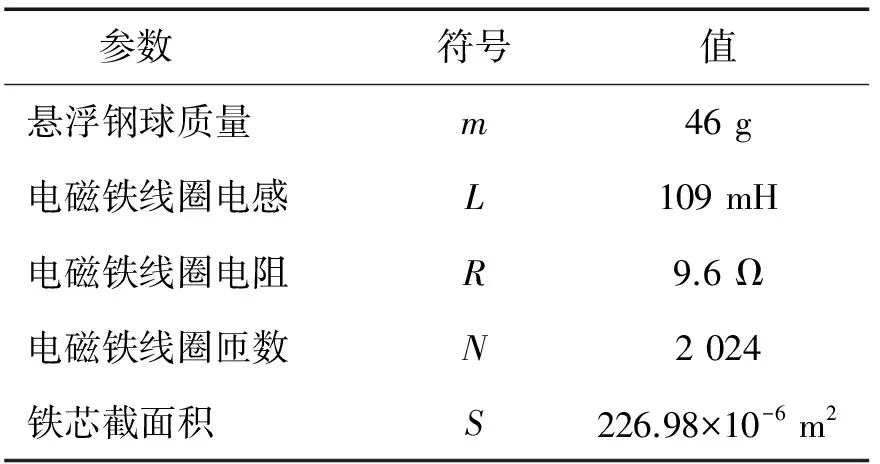
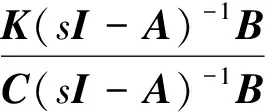
表1 悬浮系统主要参数Tab.1 Parameter list of the magnetic levitation system
3 仿真分析
以半径为12.5 mm的钢球为悬浮对象,平衡位置(球心到磁极面)设定为20.5 mm,即悬浮球距离磁极面8 mm.表1列出了磁悬浮试验装置的主要参数.
在二次型性能指标设计中,以控制电流输入和小球位置动态特征为优化目标,选择Q=[100 0;0 1],R=1,以命令LQR(A,B,Q,R)得到反馈控制增益K=[-89.71 -2.89].根据式(17)得到输出反馈控制的传递函数为
(18)
在Simulink软件中进行仿真,测试内容包括对给定位置的跟踪、对外部扰动的抵抗、对参数摄动的鲁棒性.与经典ZN控制参数整定进行对比,具体分析如下.
3.1跟踪控制效果
以表1中给出的参数由式(9)完成被控对象的模型搭建.分别以ZN方法和所提的状态优化PID方法为该对象设计控制器,以0.014 m为初始悬浮高度,将0.008 m设定为位置控制目标,仿真结果如图3所示.两种方法都能较好地完成位置跟踪的预定目标,从图3可以看出,受到权值Q的影响,所提方案具有状态加权优化效果,所得响应速度为0.1 s,经典ZN方法的响应速度为0.2 s.
3.2抗扰性能
在上述跟踪控制仿真的基础上,进一步比较两种控制方案对外部干扰的抵抗能力.在0.4 s时加入fd=0.01 N的外力作为干扰,仿真结果如图4所示.在0.2 s后,两种控制方案均能使被控对象的悬浮位置稳定到预定的0.008 m.在0.4 s开始持续增加外部干扰时,两种方案的控制效果差异明显,所提的SSPID方法能够使悬浮对象在经过约0.09 s的振荡调节后迅速恢复到预定位置.使用经典ZNPID方法时,受干扰偏离预定位置的悬浮对象未能自动恢复,最终存在0.000 5 m的稳态误差.
3.3参数摄动分析
在抗扰性能分析的基础上,将磁悬浮系统的电流刚度调整到原来的一半,用当前控制参数进行仿真,分析两种控制方案对系统内部参数摄动的鲁棒性,仿真结果如图5所示.当电流刚度发生摄动时,所提的SSPID控制方案对参数摄动不敏感,在外部干扰发生0.4 s时,悬浮对象的振荡幅度仅有小幅增加.而同样情况发生时,ZNPID方法则无法稳定悬浮,造成了掉落的失控结果.对比显示,经过状态优化的方案对电流刚度摄动的灵敏度较低,鲁棒性强.
图3 位置跟踪效果比较Fig.3 Comparison of position tracking
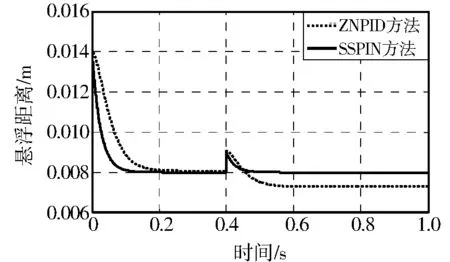
图4 有外部干扰时的仿真结果Fig.4 Simulation results with external disturbance
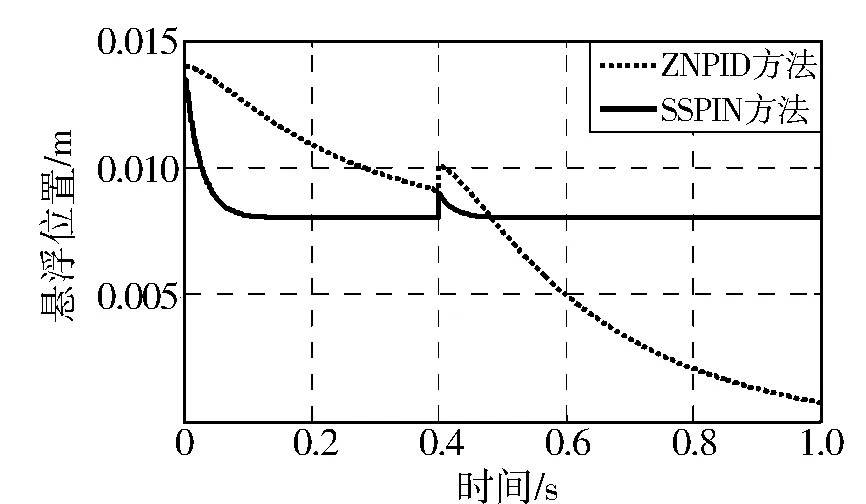
图5 有参数摄动时的仿真结果Fig.5 Simulation results with parameter perturbations
4 结语
以磁悬浮球悬浮高度的准确快速跟踪为设计目标,对传统PID控制参数的整定方法进行了优化探讨.通过输出反馈与状态反馈控制结构的对比,将LQ二次最优设计方法用于PID控制参数的整定,这样的改变使系统具有输出反馈的简单结构,而且控制参数的求解有了统一的最优解表达.从实验结果看,优化后的控制系统跟踪速度快、静差小,对系统参数扰动的抵抗能力也有所提升.优化后的设计方法使得输出反馈结构具有状态反馈优化的效果,所得仿真实验数据为悬浮系统设计提供了技术支持,下一步将在应用实例中对所得设计方案进行验证和分析.
[1] NA W,PARK T,KIM T.Light fuel-cell hybrid electric vehicles based on predictive controllers[J].IEEE Transaction on Vehicular Technology,2011(60):89-97.
[2] 蓝益鹏,陈其林,胡学成,等.磁悬浮永磁直线电动机控制系统非脆弱鲁棒控制的研究[J].电工技术学报,2016(7): 26-32.
[3] JIANG D,SHAN Y,WANG D Y,et al.Research on magnetic levitation absolute vibration measurement method in vehicles[J].Instrumentation,2014(2):38-49.
[4] 任鹏飞,薛鹏.基于修正BP的磁悬浮系统PID控制参数优化[J].河南工程学院学报(自然科学版),2016(3):42-46.
[5] 谢磊,聂洪平,何莹.改进型PID控制永磁偏置磁悬浮轴承[J].微特电机,2017(2):23-26,30.
[6] 李广.磁悬浮球系统的鲁棒控制研究[D].哈尔滨:哈尔滨工程大学,2013.
OutputfeedbackcontrollerdesignformagneticlevitationsystemviaLQoptimization
XUEPeng,HANJiale,LIBaolong
(CollegeofElectricalInformationEngineering,HenanUniversityofEngineering,Zhengzhou451191,China)
Magnetic levitation is an open-loop unstable nonlinear system. Its control algorithm is worth being studied. Although the output feedback PID control scheme is widely used because of its simplicity, its control accuracy is poor due to the parameter tuning depends on design experience. With the output feedback structure, LQ quadratic optimization method was proposed to optimize its control parameters. The designed magnetic levitation control system has the following advantages. A uniform optimal solution was obtained which makes the calculation more convenient. The status information was used for the controller design, which improves the control performance of the output feedback. The proposed scheme avoided complex computations of state samples. Comparing the proposed scheme with the classical PID scheme, simulation results show that the proposed control scheme with LQ optimization has better tracking performance. The sensitivity to external disturbances and internal parameters perturbations is reduced.
magnetic levitation; output feedback; LQ optimization; robust
TP273
A
1674-330X(2017)03-0039-05
2017-01-08
薛鹏(1978-),男,河南郾城人,副教授,博士,主要从事先进智能控制和人机协作系统优化方面的研究.
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
湖南税务高等专科学校学报(2021年4期)2021-08-30
小学科学(学生版)(2021年4期)2021-07-23
力学学报(2020年4期)2020-08-11
意林(2018年3期)2018-03-02
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
科学与财富(2017年15期)2017-06-03
黑龙江电力(2017年1期)2017-05-17
科技创新与应用(2017年1期)2017-05-11