
小型无人机伞降回收与失控保护系统的研究
2017-10-21 13:43王童邢健健张文君李民权
科技风 2017年8期
关键词:GPS定位
王童 邢健健 张文君 李民权
摘 要:近年来,小型无人机在测绘、农业植保、航拍、消防等方面有着广泛的应用。但目前市场上大部分无人机无配置完善的失控坠落保护装置。基于这种现状,文章提出一种通过姿态检测、伞降回收以及GPS定位搜寻方式来保障小型无人机安全降落的失控保护系统。提高小型无人机的飞行安全水平,让使用者更便利、安全地使用无人机。并在实际应用中有效避免小型无人机失控坠落给地面人员和财产造成损失。
关键词:小型无人机;伞降回收;GPS定位;失控保护
随着小型无人机应用领域的扩展,民用和消费级无人机市场逐渐兴起。而传统的无人机失控保护系统无法切断无人机电机动力,并不装备伞降装置[ 1 ]。失控坠落的无人机严重威胁附近人群的生命安全。
因此,需要一种新型设备,能够在飞机坠机前就能判断出此飞机已经处于失控坠机状态,并自动切断无人机动力、触发伞降装置来降低安全隐患,避免可能因为与地面撞击产生的不必要的损失[ 2 ]。
1 系统总体设计方案
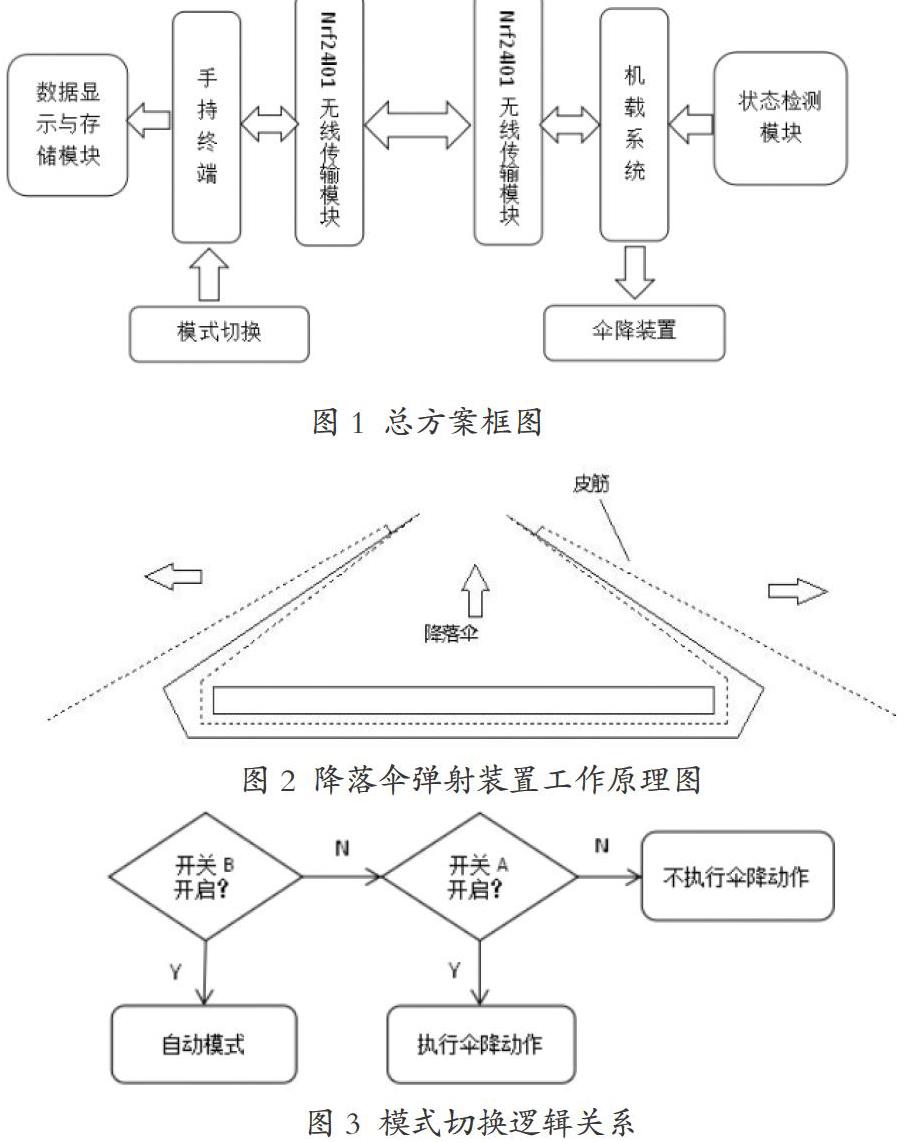
整个系统主要由两大部分组成:手持终端——机载系统,通过nrf24l01无线模块进行双向信号传输,实现自动与手动触发保护系统。(总方案框图见图1)
在自动模式下,机载系统通过传感器对无人机飞行姿态进行检测。若达到预设危险值范围,则触发失控保护动作。并实时将飞行状态数据通过无线模块传送至手持终端,显示并储存,同时向操控者发出警报。
在手动模式下,使用者可根据具体需要强制触发失控保护系统,即强制进行伞降,便于飞行器的回收。
2 主控芯片与无线双向通信设计
考虑到本系统需要实时响应,并采用多传感器融合技术,故选用低功耗、高性能的Atmega328作为主控芯片。并以该芯片为中心,直接利用Arduino UNO主控单片机与各传感器模块、控制模块、无线传输模块、显示模块相连,从而构成整个大系统模块[ 3 ]。
主控单片机通过SPI协议与nrf24l01无线传输模块进行通信,并通过软件编程设置无线模块交替切换收发模式来实现半双工通信,以达到机载系统与手持终端系统之间的双向通信要求[ 4 ]。
3 机载系统设计
3.1 降落伞弹射装置结构设计
降落伞弹射装置整体形状为一个倒置的椎台,上部的舱盖可依靠皮筋拉力向两边展开。两舱盖间有多根皮筋连接,中间放置降落伞。
當弹射装置被触发时,微型舵机按照控制指令摆动摇臂,使两边舱盖在皮筋的牵引下快速展开并带动舱内皮筋,使预先放置在皮筋上方的降落伞弹出(工作图见图2)。
3.2 飞行状态检测模块设计
机载系统上装有多种传感器与功能模块,GY25三轴陀螺仪快速地检测到无人机在飞行过程中的机体倾斜角度,加速度计检测无人机下坠的加速度,电压检测模块精准读取动力电压值,这三种传感器共同来完成对无人机飞行状态的检测。NEO-6M GPS模块体积小重量轻,高灵敏度的特点使之能快速接收GPS信息。蜂鸣器模块在系统相应指令下能够完成警报功能。
3.3 机载系统的设计实现
通过软件编程预先设置无人机处于失控状态时的参数值,当无人机实际飞行时的机体倾转角度与加速度达到触发失控保护的临界值或动力电压低于电池正常工作的安全电压时,系统自动判断无人机正处于失控坠机状态。处理器立即发送控制指令到继电器,使得电机停转,同时触发伞降操作。机载GPS模块实时向地面手持终端回传位置信息,蜂鸣器发出警报以在无人机接近地面时提醒地面人员注意安全。
4 手持终端设计
4.1 数据显示与储存模块
手持端的数据显示功能由0.96寸的12864 OLED模块来完成,该显示屏具有高亮度、超低功耗、高分辨率和超广可视角度的特性,且满足手持端设备对较好便携性的设计要求,该模块通过IIC协议与Arduino进行数据通信。通过文件系统及SPI接口驱动程序,单片机系统即可对SD卡模块中卡内文件进行读写。Arduino用户可直接使用Arduino IDE自带的SD卡程序库即可完成卡的初始化和读写。
4.2 控制模式切換
手持端开关A为手动模式下控制降落伞弹射的通道,开关B则为手动模式与自动模式相互切换的通道。模式切换逻辑关系如图3所示,当开关B切换到自动模式时,开关A对降落伞弹射装置的控制指令无效,伞降操作则由机载系统根据状态监测结果自动完成。
4.3 手持终端的设计实现
手持终端将接收到的GPS数据与动力电压值实时显示在OLED屏幕上,并存储到SD卡当中。当无人机处于低电压危险状态或已触发失控保护状态时,手持终端警报模块发出警报。使用者可在手持终端查询到无人机坠落的坐标数据,便于进行飞行器的回收。当手持终端采用手动模式时,可通过终端的相应通道向机载系统发送控制指令,强制触发系统的失控保护动作。
5 结论
本文设计出一种小型无人机伞降回收与失控保护系统。整个系统由机载系统与手持终端两部分组成,并通过2.4G无线传输模块实现两个系统间的双向通信[ 5 ]。当无人机飞行状态异常,保护系统根据检测的结果判断为失控坠落状态时,立即切断电机动力,并弹出降落伞,使整个飞行器以较慢的速度降落下来。无人机在伞降成功后,地面操控人员可通过机载系统的警报声寻找飞行器所在位置,或根据GPS位置信息查看无人机的准确坠落地点。
参考文献:
[1] 邵志建.次生气囊在无人机回收系统中的应用[J].南京航空航天大学学报,2009,S1:1-3.
[2] 杨尚云,曾体贤,黄超.基于超声波测距的无人机自动保护气囊系统[J].西华师范大学学报(自然科学版),2013,(04):409-412+417.
[3] 项晓强,陈冉,许耀华.用于航模探空火箭的远程控制发射与全程跟踪系统的研究[J].科技传播,2016,(13):113-114.
[4] 丁媛媛.基于nRF24L01无线双向通信系统设计[J].常州工学院学报,2012,(05):24-27+36.
[5] 刘志平,赵国良.基于nRF24L01的近距离无线数据传输[J].应用科技,2008,(03):55-58.
基金项目:安徽大学大学生创新创业训练计划项目,项目编号:201610357229;项目代码:J10118515667。
猜你喜欢
科技与创新(2017年3期)2017-03-17
科技创新导报(2016年28期)2017-03-14
电脑知识与技术(2016年30期)2017-03-06
现代电子技术(2017年1期)2017-02-16
哈尔滨理工大学学报(2016年4期)2016-11-10
电脑知识与技术(2016年15期)2016-07-04
物联网技术(2015年7期)2015-07-21
物联网技术(2014年10期)2014-10-30
现代电子技术(2014年14期)2014-07-24
