一种改进剪枝合并的GM-PHD方法
2017-10-20 06:00胡建旺
无线电通信技术 2017年6期
宋 岩,胡建旺,吉 兵,郭 超
(1.陆军工程大学石家庄校区 信息工程系, 河北 石家庄 050003; 2.中国人民解放军71777部队, 山东 济南 250100)
一种改进剪枝合并的GM-PHD方法
宋 岩1,胡建旺1,吉 兵1,郭 超2
(1.陆军工程大学石家庄校区 信息工程系, 河北 石家庄 050003; 2.中国人民解放军71777部队, 山东 济南 250100)

高斯混合概率假设密度滤波器;多目标跟踪;剪枝合并
0 引言
随着科学技术的发展,多目标跟踪领域受到各国学者的高度重视[1-2]。传统的多目标跟踪均以数据关联为主,该方法在目标数目未知且时变的情况下,跟踪精度会下降[3-4]。近年来,Mahler等人提出了随机有限集(RFS)方法,该方法利用一阶矩的形式,巧妙地避开了数据关联问题,并成功应用到目标跟踪领域,成为研究领域的热点。但是,该方法在进行递推的过程中,存在过多的积分运算,导致工程量巨大,并且难以获得解析解。于是,Vo等人提出了一种新的方法,高斯混合概率假设密度滤波(GM-PHD)[5-6]滤波方法,该方法有效解决概率假设密度递推中多重积分问题,但是随着该算法的递推,高斯分量会无限制增加,这就使计算量变得更加复杂。

1 概率假设密度(PHD)滤波器
在多目标跟踪中,由于随机有限集(Random Finite Set,RFS)[7-8]多目标跟踪不需要数据关联,因此引起国内外学者的高度重视。随机有限集可理解为元素数目随机变化,但变化范围是有限的集合。该方法通过建立集合的形式进行递推,目标状态和量测可分别表示为如下的形式:
Xk={xk,1,xk,2,...,xk,Nk}∈F(χ),
(1)
Zk={zk,1,zk,2,...,zk,Mk}∈F(ψ)。
(2)
RFS的递推过程中考虑到了目标的新生、衍生、存活和消亡等过程,则k时刻目标状态集可表示为:
Xk=Sk|k-1(x)∪Bk|k-1(x)∪Γk,
(3)
式中,Sk|k-1(x)表示k时刻仍然存活的状态集;Bk|k-1(x)表示k时刻衍生的新的目标状态集;Γk表示k时刻新出现的目标状态集。
k时刻的量测集Zk表示为:
Zk=Kk∪[Θk(x)],
(4)
式中,Kk表示杂波量的集合;Θk(x)表示观测随机集,文献[9]中给出了详细的说明。
通过上述对目标状态和观测量的RFS建模,推导出多目标贝叶斯的递推式:
预测:
(5)
更新:

(6)
通过随机有限集方法,由近似方法得到k时刻概率假设密度为:
(7)
则可以得到PHD的递推公式(8)为:
Dk|k-1(xk|Z1:k-1)=
(8)
于是更新的概率假设密度(PHD)可表示为:
Dk(xk|Z1:k)=(1-PD)Dk|k-1(xk|Z1:k-1)+
(9)
2 高斯混合概率假设密度(GM-PHD)滤波器
GM-PHD滤波算法[10]之所以能够实现对多目标的递推,这是因为在k-1时刻具有高斯混合形式的多目标PHD递推到k时刻仍然具有高斯混合的形式。
GM-PHD滤波器的实现流程[11-13]:
系统方程为:
xk=f(xk-1)+ωk,
(10)
zk=h(xk)+vk,
(11)
式中,fxk-1为状态转移函数;xk为系统状态量;hxk为系统量测方程;zk为系统量测量;ωk和υk分别表示状态过程噪声和量测噪声,且假定为高斯白噪声,相互之间独立。
GM-PHD滤波器的实现流程主要包括对高斯分量的预测和更新:
① 初始化:初始化可表示为:
(12)
② 预测:新生和衍生目标密度分别表示为:
(13)
(14)
由此可得预测PHD函数为:
Dk|k-1(x)=Ds,k|k-1(x)+Db,k|k-1(x)+γk(x)。
(15)
Ds,k|k-1(x)和Db,k|k-1(x)分别表示存活目标和衍生目标的PHD,即
(16)
(17)
则预测PHD可表示为
(18)
③ 更新:在更新阶段,其PHD可记为:

(19)
3 改进剪枝合并方法
针对GM-PHD算法中,计算量无线增大的情况,提出了改进的剪枝合并方法,来控制GM-PHD的计算量。
GM-PHD算法计算复杂度主要取决于高斯项数目。在k时刻,PHD滤波的计算复杂度为:
(Jk-1(1+JB,k)+Jγ,k)(1+Zk)=Ο(Jk-1Zk),
(20)
式中,Jk-1为k-1时刻后验PHD的高斯项数目。从式中可知,经过PHD更新后,算法中高斯分量的个数会无限制的增加。针对这个问题,预先设置裁剪门限Tr和合并阈值U,通过这个门限Tr,去除低于该权值的高斯分量,以减少一部分计算量,算法中保留高于该门限Tr的高斯分量;对于分布相近的高斯分量,进行合并处理,以减少计算量,使2个高斯分量合并成一个大权值的高斯分量。
改进的剪枝合并方法在减少高斯分量个数的同时,对合并阈值U提出新的表示方法,使该算法既能减少计算量,又能提高多目标跟踪的精度。

算法流程如下:
PHD函数可以表示为:

剪枝后的集合表示为集合I:

合并过程如下:
(21)
(22)
(23)
该合并距离的优势在于:

③ 引入了u1和u22个系数,充分考虑高斯分量3个重要参数对其合并距离的影响。u1和u2两个系数的具体形式与合并高斯分量的权值有关。通常情况下,可以取:

(24)

(25)

(26)
4 仿真结果与分析
目标的监测区域为[-100 m,100 m]×[-100 m,100 m]。为了简化仿真的条件,实验中仅考虑二维空间中的运动,并且由于衍生目标对目标跟踪的影响较小,故对此不进行严格的考虑说明。假设杂波服从泊松分布:
状态转移矩阵和状态噪声转移矩阵表示如下:
量测矩阵和量测噪声标准差为:

采样时间间隔T=1,杂波平均数为10,存活概率为Ps=0.99,检测概率为PD=0.9,修剪门限Up=10-5,最大高斯数Jmax=100, OPSA的参数定义为c=70、p=2,合并门限Um=5,跟踪时长为50个采样周期。仿真实验如图1所示。

图1 多目标量测值
图1为多目标量测值,从图中可以看出,目标处在大量的杂波环境下,受到各种杂波和虚警等干扰因素的影响,增加了跟踪目标的难度,很难得到需要的有用信息。图2表示目标的真实轨迹与算法状态估计的结果。

图2 多目标真实轨迹及状态估计
图2中,真实目标处在各种干扰因素之下,但在经过改进后的高斯混合概率假设密度滤波器滤波之后,可以得到多目标的状态估计量,并且从图中可以看出,该方法能够较好地跟踪目标,表明算法的可行性。
图3表示对目标数目进行估计,从图中3可以得到不同时刻上多目标数目的估计值。对比于目标数目的真实值,所改进算法能有效估计出监视区域的目标数目,提供目标数目的瞬时信息。由于考虑到了目标的衍生与消亡,在各别孤立点上,会有一定的误差。
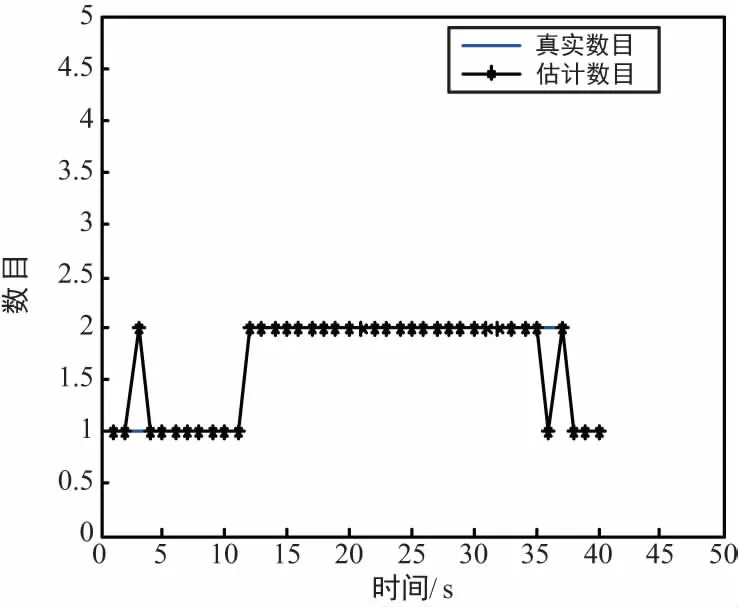
图3 目标数目估计
图4为2种算法经过50次蒙特卡罗实验后的比较情况。最优子模式分配(OSPA)距离是评价多目标状态估计集合和真实集合间估计误差的指标,其值越小表示多目标估计的性能越好,即多目标跟踪的性能越好精度越高。

图4 最优子模式分配距离
从图4中可知,经过改进后的算法进行滤波后,最优子模式分配(Optimal Sub-Pattern Assignment,OSPA)距离小于原始方法滤波后得到的距离,表明改进算法是切实可行的。该改进算法不仅提高了跟踪目标的精度,而且减少了计算量,缩短了算法执行的时间。原算法执行的时间大概为0.54 s,改进算法的运行时间大概为0.47 s,缩短了算法运行的时间,提高了目标跟踪的效率。虽然在有些地方会出现较大的峰值,这是由于新生目标没有及时被检测出来,而消失的目标也未能及时排除。图4中的纵坐标d代表多目标状态估计值和真实值间的估计误差大小,从图中可以看出新改进的算法目标跟踪精度更高。
5 结束语
本文针对GM-PHD算法中,存在计算量大,目标跟踪精度不高等问题,从剪枝合并算法入手提出一种改进方法。该改进方法主要针对剪枝合并过程中,各个高斯分量参数对多目标跟踪的影响,对合并距离d进行了优化。通过大量的仿真实验得出结论:在杂波环境下,该方法有效地减少了计算量并且提高了多目标跟踪的精度。
[1] Syed A P,Hoang D T,Ba N V.Nonlinear Bayesian Filtering Using the Unscented Linear Fractional Transfor Mation Model[J].IEEE Trans Signal Processing,2010,58(2):477-489.
[2] 童慧思,张颢,孟华东,等.PHD滤波器在多目标检测前跟踪中的应用[J].电子学报,2011,39(9):2046-2051.
[3] Wen C L,Li Z L,Xu X B.A New Method for Extracting Fuzzy Evidence from Fuzzy Information Based on Therandom Set Theory[C]∥IEEE,7th World Congress on Intelligent Control and Automation.Chongqing,China,2008:4999-5003.
[4] Mahler R.Statistical Multisource Multitarget Information Fusion[M].Boston: Artech House Publishers,2007.
[5] Kusha P,Daniel C,Ba N V.Data Association Andmanagement for the Gaussian Mixture Probability Hypothesis[J].IEEE Trans Aerospace and Electronic Systems,2009,45(3):1003-1016.
[6] Vo B, Pasha A,Tuan H D.A Gaussian Mixture PHD Filter for Nonlinear Jump Markov Models[C]∥ Proceedings of the 45th IEEE Conference on Decision and Control,California,2006:3162-3167.
[7] Kamaen E W.Multiple Target Tracking Based on Symmetrical Measurement Equations[J].IEEE Transactions on Automatic Control,1992,37(3):371-374.
[8] Mahler R.Multi-target Bayes Filtering Via first-order multi-targetmoments[J].IEEE Transaction on Aerospace and Electronic Systems(S0098-3063),2003,39(2):1152-1178.
[9] MAHLER R.PHD Filters of Higher Order in Target Number[J].IEEE Transactions on Aerospace and Electronic Systems 2007,43(4):1525-1543.
[10] Ba N V,Wing K M.The Gaussian Mixture Probability Hypothesis Density Filter[J].IEEE Trans Signal Pro cessing,2006,54(11):4091-4104.
[11] Ienkaran A,Simon H. Cubature Kalman filters[J]. IEEE Trans Autom Control,2009,54(6):1254-1269.
[12] Vo B N,Ma W K.The Gaussian Mixture Probability Hypothesis Density Filter[J].IEEE Transactions on Signal Processing,2006,54(11):4091-4104.
[13] Luc C,Eric C.Low Costmoving Target Tracking and Fire Control.International Radar Conference on Surveillance for a Safer World[C]∥Bordeaux,France:IEEE,2009:1-4.
AnImprovedAlgorithmofPruningandMergingBasedonGM-PHD
SONG Yan1,HU Jian-wang1,JI Bing1,GUO Chao2
(1. Department of Information Engineering,Army Engineering University Shijiazhuang Campus,Shijiazhuang Hebei 050003,China; 2. Unit 71777,PLA,Ji’nan Shandong 250100,China)
Gaussian mixture probability hypothesis density filter; multi-target tracking; prune and merge
TN713
A
1003-3114(2017)06-45-4
10. 3969/j.issn. 1003-3114. 2017.06.11
宋岩,胡建旺,吉兵,等. 一种改进剪枝合并的GM-PHD方法[J].无线电通信技术,2017,43(6):45-48,85.
[SONG Yan,HU Jianwang,JI Bing,et al. An Improved Algorithm of Pruning and Merging Based on GM-PHD [J]. Radio Communications Technology,2017,43(6):45-48,85.]
2017-06-12
宋 岩(1993—),男,硕士研究生,主要研究方向:指挥信息系统理论及信息融合。胡建旺(1967—),男,教授,主要研究方向:指挥信息系统理论、技术及装备。
猜你喜欢
保健医苑(2022年5期)2022-06-10
小猕猴智力画刊(2021年6期)2021-08-05
成都信息工程大学学报(2021年6期)2021-02-12
计算机应用(2020年5期)2020-06-07
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
天津诗人(2017年2期)2017-03-16
中国民族医药杂志(2016年5期)2016-05-09
作文大王·低年级(2016年3期)2016-03-11
电影故事(2015年16期)2015-07-14