
地形坡度对越野机动时间影响分析
2017-10-17 03:13:58袁仁进王冰冰
地理信息世界 2017年6期
袁仁进,陈 刚,王冰冰
(信息工程大学 地理空间信息学院,河南 郑州 450001)
0 引 言
道路机动是机动的主要形式[1],但是在民用交通、军事行动和抗震救灾等情况下,越野机动也发挥着很大的作用。要实现对越野机动的路径规划,需要考虑到诸多地理要素,包括:地貌、植被、土壤土质、气象、水文、居民地、道路以及其他社会因素。由于影响要素太多,情况复杂,要真正实现精确的越野机动路径规划难度较大。在地貌要素中,由于地表情况复杂,目前通用的是用数字高程模型(Digital Elevation Model,DEM)来模拟复杂的地貌形态,其对越野机动的影响主要为坡度(Slope)。
针对地貌要素对越野机动的分析研究,国外研究相对较早。主要代表有捷克的Marian Rybansky等人[2],其在矢量图和栅格图两种形式中对越野机动进行了建模分析,系统而深入地研究了各个地理要素以及其他社会因素对越野机动的影响,但在DEM上计算坡度算法相对简单。在国内方面,刘学军、汤国安等人[3-4]研究了在DEM上计算坡度的算法,并进行了对比分析,文献[5]研究了不同DEM分辨率的坡度转化问题,文献[6]按坡度大小将其分成3个等级:易通行、困难通行、不能通行,并赋予相应的速度影响权值,但模型不够精细,同时也没有考虑坡度对车辆自身速度的影响。
本文以DEM来模拟地貌形态,研究地貌形态 对车辆越野机动的速度影响系数(记为c1)。坡度是描述地表复杂度的基本方法[7],坡度对车辆越野机动的影响具体表现为以下2个方面:
1)坡度引起路线延长;
2)坡度影响车辆牵引力,进而影响车辆速度。
本文将在相应分辨率的DEM数据基础上,对格网单元进行分析研究。首先计算格网单元的平均坡度,构建数学模型计算路线延长的速度影响系数(记为c11),以及坡度对车辆速度的影响系数(记为c12),接着构建模型计算影响系数c1,从而实现地形坡度 对车辆越野机动的速度影响分析,估算出车辆在越野机动中的时间。
1 坡度的计算
地面上某点的坡度是表示地表面在该点倾斜程度的一个量[7]。实际情况的地表情况十分复杂,目前通用DEM来模拟地貌形态,同时文献[7]中提出拟合曲面法是求解坡度的最佳方法。在地形曲面z=f(x,y)中,坡度slope的计算公式为:


图1 DEM3×3局部移动窗口Fig. 1 DEM 3×3 local movement window

图2 DEM格网单元3×3局部移动窗口Fig. 2 DEM grid unit 3×3 local movement window
以图1中的方法为基础,目前有6种常用的坡度算法来计算中心点5的坡度,见表1。表1中zi(i=1,2,…,9)为中心点5周围格网点的高程。
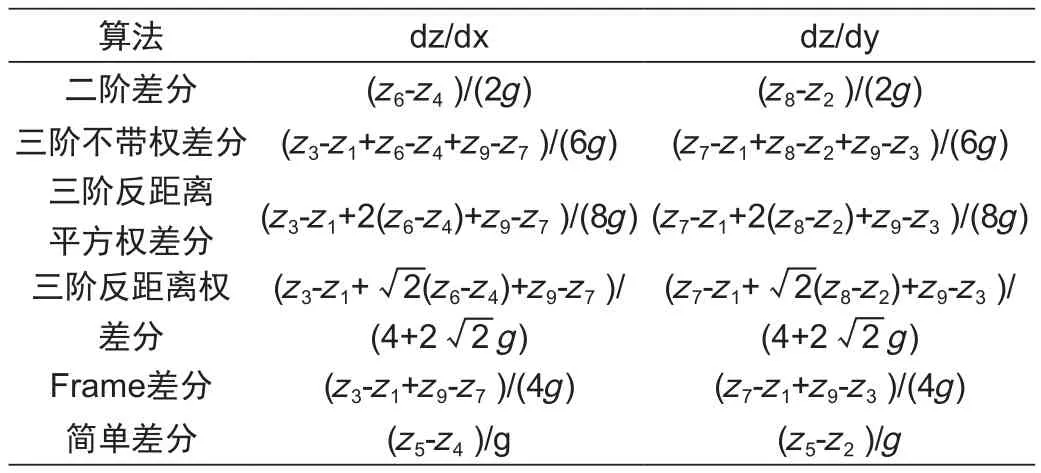
表1 坡度计算数学模型Tab. 1 Slope calculation mathematical model
如图2所示,以中心像元及其相邻的8个像元的值确定水平增量和垂直增量。本文采用三阶反距离平方权差分的算法来计算中心像元5的坡度,zi(i=1,2,…,9)代表周围像元的高程。则图2中中心像元5的坡度计算公式为:
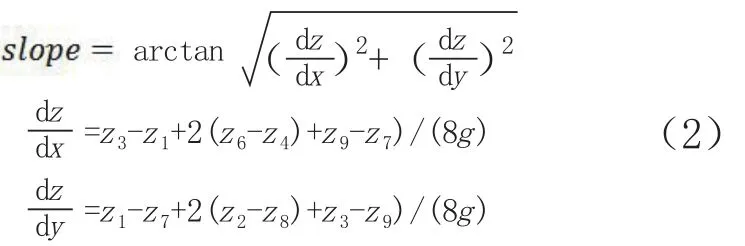
将坡度改为以度为单位。

式中,π为数学中的圆周率。
2 计算速度影响系数c1
通过DEM来模拟地貌形态,研究地形坡度 对车辆越野机动的速度影响系数c1。地形坡度对车辆越野机动的影响具体表现为以下2个方面:
1)坡度引起路线延长,其速度影响系数为c11;
2)坡度影响车辆牵引力,进而影响车辆速度,其速度影响系数为c12。
速度影响系数c1与c11、c12之间的函数关系式用表达式(4)表示:

若f(c11,c12)=ac11+bc12,(a+b=1)。当车辆经过一个极限坡度时,车辆无法越过坡度障碍,此时c12=0,c1也应当等于0。但是当c12=0时,f(c11,c12)=ac11,c11≠0,故c1≠0,矛盾,所以表达式应当为:

2.1 计算速度影响系数c11
如图3所示,当车辆在坡度为α的斜坡上行驶时,其行进距离会随着坡度变化呈线性延长。当水平距离为l时,斜坡距离为l',其函数关系为:
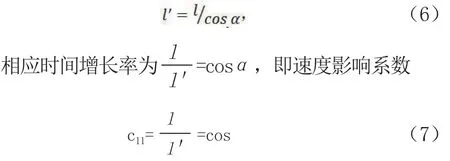
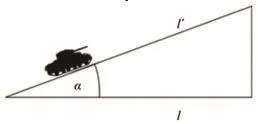
图3 坡度对路线长度的延长Fig. 3 The route length extension by the slope
2.2 计算速度影响系数c12
车辆运动时存在行驶阻力,这些阻力必须由发动机功率来克服[9]。当车辆在坡度为α的斜坡上行驶时,其行驶阻力会随着坡度的变化而发生变化,车辆的牵引力F也将受到影响,如图4所示。
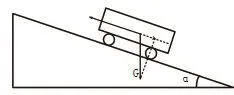
图4 坡度对车辆行驶阻力影响示意图Fig. 4 Slope of the vehicle running resistance diagram
车辆运行时需要克服滚动阻力、空气阻力、坡度阻力以及加速阻力[10]。在仅考虑坡度对车辆的速度影响前提下,其他因素均看成理想情况,即仅考虑坡度阻力对车辆速度的影响。假设车辆在水平路面上以恒定速度v行驶,其行驶功率为P,P=f(v)。当车辆在坡度为α的斜坡上行驶时,保持车辆速度v不变,由于车辆本身重力的影响会使车辆的输出功率增加ΔP,其中,ΔP=νG sinα,故车辆的速度影响系数c12为:

c12随着车辆型号的不同而发生变化。
在实际情况中,车辆的运动受到多种因素的影响,情况十分复杂,c12很难通过公式计算出来。通常研究中,此值通过对采样数据进行数学分析得出。根据不同车辆在某些坡度αi中能最大行驶速度vi得出的采样数据,车辆在坡度为0的较理想路面上速度为vmax,则车辆在坡度αi的速度影响系数为:

3 实验验证
3.1 数据准备
本文从网上下载DEM数据进行实验,数据范围为东经6°~7°,北纬0°~1°,DEM数据为30m分辨率。DEM数据如图5所示,最高海拔5792m,最低海拔为海平面0m。由于范围过大,实验中取少部分栅格进行研究。
图5 DEM实验数据Fig. 5 DEM experimental data
为计算速度影响系数c12,以文献[1]和文献[11]中的数据进行实验,表中反映了不同类型车辆在非道路硬质地形中的速度值 ,具体数值见表2。
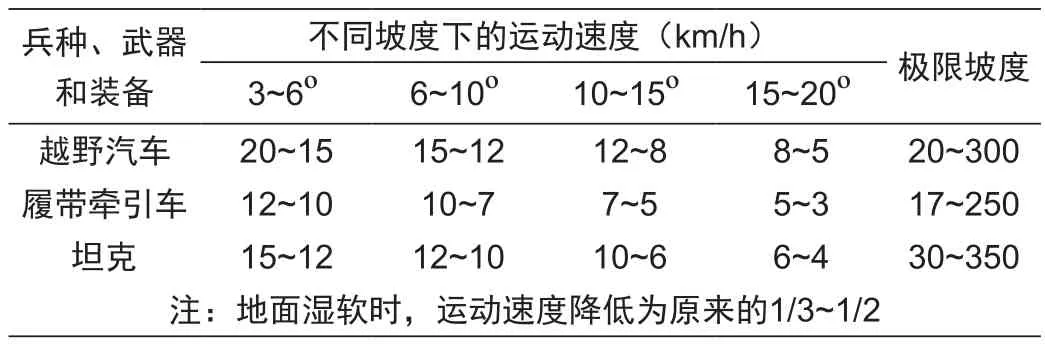
表2 战斗车辆在不同坡度上的运动速度[11]Tab. 2 Movement speed of combat vehicles on diあerent slopes
以越野汽车为例,由表2获取越野汽车在不同坡度上速度值。
根据公式(7)将表3转化为越野汽车的坡度-速度影响系数表。

表3 车辆坡度-速度采样表Tab. 3 Vehicle slope - speed samples table
根据表4的数据,画出越野汽车的坡度-速度影响系数折线图,便于观察坡度与速度之间的函数关系,为构建坡度-速度影响系数关系式提供依据,折线图如图6所示。

表4 车辆坡度-速度影响系数采样表Tab. 4 Vehicle slope - speed deceleration coeきcient samples table
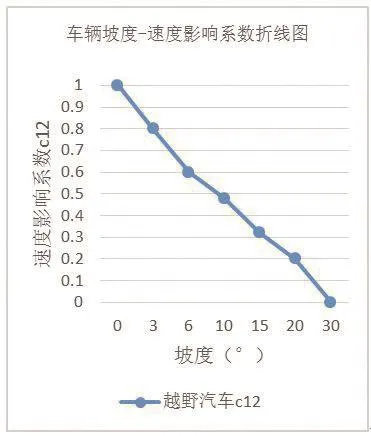
图6 车辆坡度-速度影响系数折线图Fig. 6 The slope-speed influence coeきcient line diagram
为求解出越野汽车坡度与速度影响系数之间的数学关系,使用matlab软件对图6中的折线图进行拟合。分别使用一次多项式、二次多项式和三次多项式对数据进行拟合,并比较3种方法的拟合误差。具体数据见表5。
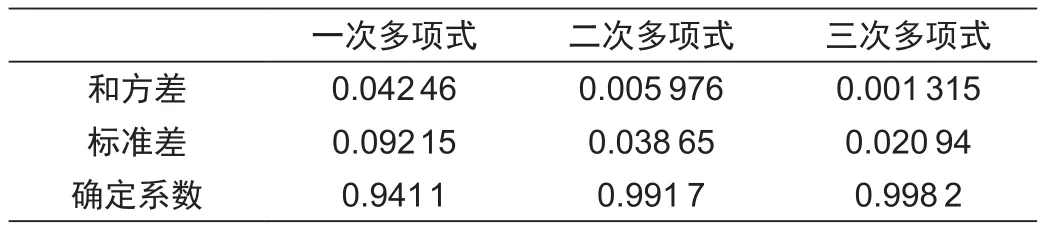
表5 3种多项式拟合误差比较Tab. 5 The compare of three diあerent polynomial fitting errors
由表5可知,在和方差、标准差和确定系数这3个方面,一次多项式的误差明显大于二次多项式的误差。随着多项式复杂度的增加,三次多项式的误差与二次多项式相比相差不大。因此,在保证精度的前提下,为简化计算,采用二次多项式做拟合曲线进行拟合,构建坡度α与速度影响系数c12之间的数学关系式。在matlab中进行编程实现。得出越野汽车的函数关系式为:

其函数示意图如图7所示。
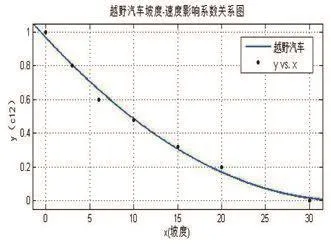
图7 越野汽车坡度-速度影响系数关系图Fig. 7 Oあ-road vehicle slope - speed influence coeきcient diagram
3.2 实验流程与结果
以ArcGIS软件进行二次开发,计算车辆从起点A到达终点B的越野机动通行时间,实验流程如图8所示。
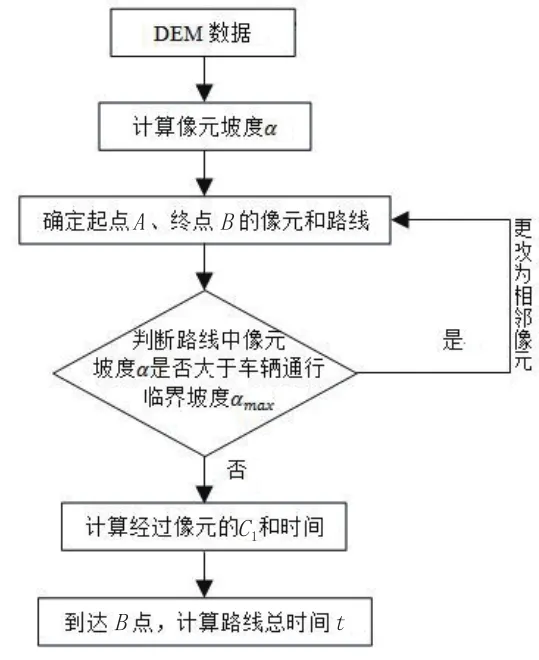
图8 实验流程图Fig. 8 Experimental flow chart
实验中,以下载的30m分辨率的DEM像元为格网单元,首先根据上述算法计算格网单元的坡度。为便于观察,对不同坡度进行了分层设色,由上文可知,越野汽车的最大通行坡度在30°附近,故当坡度α>30°时,设定一种颜色。分层设色的坡度范围为:0°~5°、5°~10°、10°~15°、15°~20°、20°~25°、25°~30°以及30°以上,坡度分层设色结果如图9所示。
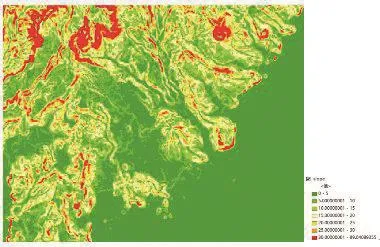
图9 坡度分层设色图Fig. 9 Slope layered color chart
为便于分析格网单元坡度情况与速度影响系数,取原数据中小部分进行分析。范围为:6°33´56.57"E~6°34´1.42"E,0°4´32.97" N~0°4´37.83"N,具体为5×5的格网单元,如图10所示,点A为起点,点B为终点,L为路线。获取像元的坡度属性如图11所示。
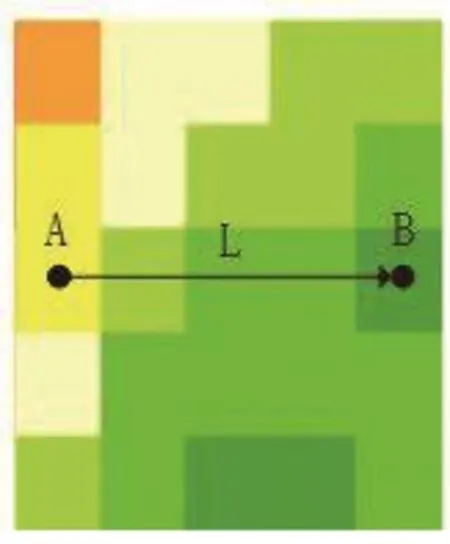
图10 5×5格网单元Fig. 10 5 x 5 grid unit
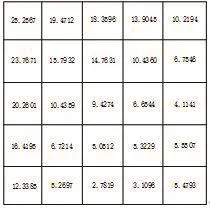
图11 带坡度属性的格网Fig. 11 Grid with slope properties
在图11的基础上根据上文的数学模型,计算出速度影响系数c11。同时,根据公式(10)计算出越野汽车的速度影响系数c12,最后根据公式(5)计算出c1,流程如图12所示。
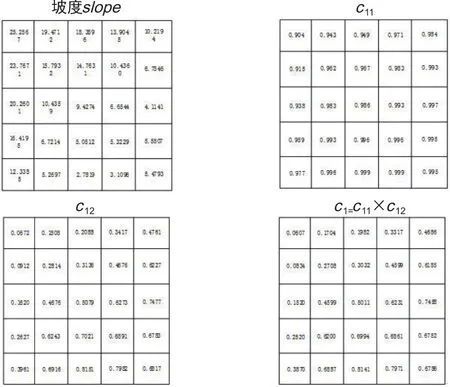
图12 c1计算流程图Fig. 12 c1 calculation flow chart
当车辆进入每个格网单元时,其初始速度均为最大值,则格网单元中车辆实际通行速度v=vmax×c1,流程如图13所示。
根据图13的计算结果,越野汽车从A点到B点所走路线所需时间为:

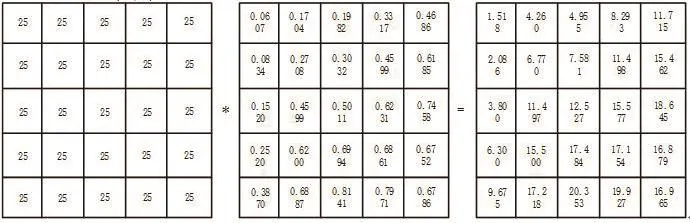
图13 格网单元中车辆速度计算示意图Fig. 13 Schematic diagram of vehicle speed in grid units
3.3 结果分析
在地貌要素中,考虑了影响车辆通行时间的两种因素:坡度引起路程延长和坡度改变车辆速度,以这两种因素建模分析,计算出越野机车从A点到B点所走路线的时间较为合理,不过还需车辆实地检验,验证模型的准确性。
4 结束语
新形势下,在虚拟地理环境中研究车辆越野机动模型,准确预测和规划车辆的通行时间尤为重要。本文研究地貌形态对车辆越野机动的影响,得出如下结论:
1)地貌形态中坡度影响车辆通行时间表现在两个方面:坡度引起路程延长和坡度改变车辆速度。本文以此为基础建立了完整的数学模型,估算了车辆通行时间,为抗震救灾、军事行动和野外活动等提供了时间规划参考。
2)考虑了坡度改变车辆自身速度这一影响因素,增加了模型的可靠性和准确度。
以下几方面还需进一步研究:
1)影响车辆越野机动的地理要素众多,为系统研究这一问题,今后还需建立植被、水文、土壤土质、居民地、道路等要素对车辆越野机动的影响模型。
2)DEM数据的格网分辨率还需进一步研究,确定不同比例尺下最优格网分辨率。
3)坡度对车辆本身速度的影响还需大量实地数据支撑。
猜你喜欢
汽车观察(2022年12期)2023-01-17 02:21:48
装备制造技术(2020年3期)2020-12-25 05:21:52
空间科学学报(2020年6期)2020-07-21 05:36:46
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
汽车观察(2019年2期)2019-03-15 06:00:10
小学生导刊(2017年13期)2017-06-15 20:29:38
江西理工大学学报(2015年3期)2015-12-22 05:26:18
车迷(2015年11期)2015-08-23 11:48:08
小哥白尼·军事科学画报(2014年8期)2015-04-07 03:54:50
