电动助力转向系统控制策略仿真
2017-10-17 03:42杨杰冉光伟马乐陈桥芳
汽车实用技术 2017年18期
杨杰,冉光伟,马乐,陈桥芳
(1.华南理工大学机械与汽车工程学院,广东 广州 510640;2.广州汽车集团股份有限公司汽车工程研究院,广东 广州 511400;3. 华南理工大学广州学院,广东 广州 510800)
电动助力转向系统控制策略仿真
杨杰1,冉光伟2,马乐3,陈桥芳3
(1.华南理工大学机械与汽车工程学院,广东 广州 510640;2.广州汽车集团股份有限公司汽车工程研究院,广东 广州 511400;3. 华南理工大学广州学院,广东 广州 510800)
为了兼顾乘用车电动助力转向系统的助力特性与回正特性,提出了一种基于模糊PID控制的电动助力转向控制策略,并进行了仿真验证。首先,设计基于模糊PID控制的电动助力转向控制策略。然后,利用Matlab/Simulink进行离线仿真,对基本助力特性和回正特性进行验证。最后,通过硬件在环实验对所提控制策略进行分析。实验结果表明,所提控制策略能较好地实现电动助力转向系统的功能和改善转向稳定性。
乘用车;电动助力转向;Matlab/Simulink;硬件在环实验
Abstract:In order to take into account the steering portability and the turning performance of passenger vehicle, an electric power steering control strategy based on Fuzzy PID control was proposed, and the simulation verification was performed.First of all, an electric power steering control strategy was designed on the basis of the fuzzy PID control method. Then the effectiveness of the steering portability and the turning performance was verified by means of Matlab/Simulink. Finally, the proposed control strategy was analyzed through the hardware-in-the-loop experiment. The experimental results show that the function of electric power steering system can be realized by the control strategy and the steering stability can be improved.
Keywords: passenger vehicle; electric power steering; Matlab/Simulink; hardware-in-the-loop experiment
CLC NO.: U461.1 Document Code: A Article ID: 1671-7988 (2017)18-192-03
前言
随着电动助力转向系统(EPS)的普及,电动助力转向系统的研究得到了国内外众多学者的关注。Kim S.等[1]提出高通滤波方法,对电机转子位置信号进行处理以获得路面干扰下电机角速度,从而确定冲击补偿电流。江浩斌[2]提出为兼顾直线型助力特性与曲线型助力特性的优点,把两种特性曲线组合而成一种新型助力特性曲线。李绍松[3]分析了EPS控制参数灵敏度,并给出控制参数对转向性能的敏感关系,确定了满足转向性能要求的控制参数值。
为了兼顾四轮驱动汽车基本助力控制和回正控制,本文建立了电动助力转向系统动力学模型,设计了基于模糊 PID控制的电动助力转向系统控制策略。然后,利用 Matlab/Simulink对其基本助力特性和回正特性进行验证。最后,建立基于实时仿真系统dSPACE的EPS转向系统台架,对所提控制策略进行了硬件在环实验分析。
1 电动助力转向系统控制策略设计
本文选用转向轴助力式C-EPS为研究对象,将整个电动助力转向系统分解为包括机械转向系、转向阻力系、整车模型系和助力电机系等多个模块,分别进行建模分析[4]。为了满足在不同工况下,对电动助力转向系统的要求,适应驾驶员的主观感受,采用模糊PID控制方法确定助力电机目标电流。为了便于简化设计,提高程序响应性,选用直线型助力曲线作为助力的基本控制方式。
EPS系统的控制策略主要包括两个方面:
(1)确定电机助力特性,即确定目标电流;
(2)对助力电机电流进行闭环控制,即精确跟踪控制电机电流。
将转向系统动力学模型与汽车系统模型连接,得到电动助力转向系统仿真模型。电动助力转向系统Matlab/Simulink模型如图1。

图1 电动助力转向系统Matlab/Simulink模型
2 电动助力转向系统离线仿真
为验证所提控制策略,在Matlab/Simulink中,分别进行基本助力特性和回正特性仿真。
2.1 基本助力特性
选取车速在30 km/h、60 km/h和90 km/h三种工况,分别模拟低速转向、中速转向、高速转向的行驶工况,对基本助力特性进行仿真分析。

表1 不同车速下方向盘转矩最大值
图 2-(a)、(b)、(c)为在不同车速下,以幅值为 540°、周期为6.28 s的正弦信号作为方向盘转角输入,对比无助力时和有助力时扭矩传感器侦测到的方向盘转矩Simulink仿真结果。可见,加入EPS后,在各车速下方向盘转矩明显下降,低速转向轻便性得到了很大提升;高速转向方向盘力矩也有所下降,但又明显高于低速转向方向盘力矩,保证了车辆在高速行驶时的路感。不同车速下方向盘转矩最大值如表1所示。

图2 EPS基本助力效果
图3为对比车速为30 km/h、60 km/h、75 km/h、90 km/h和120 km/h时的基本助力仿真结果。可见,方向盘转矩随着车速增大而增大,曲线的斜率随着车速增大而增大。即在相同的转角输入下,车速越高,助力扭矩越小,方向盘转矩越大,这是为了保证高速时转向路感。这种助力特性能兼顾四轮驱动汽车低速时的转向轻便性和高速转向路感,满足基本助力要求。
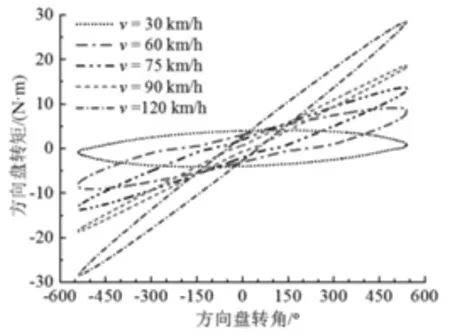
图3 不同车速下的方向盘转角--方向盘转矩图
2.2 回正控制特性
为了增加车辆在出弯道的时候方向盘回正的力矩,提高车辆回正性能,一般在电动助力转向控制系统中可以考虑采用回正控制。
图 4-(a)、(b)、(c)分别为车速在 30 km/h、60 km/h、90 km/h时,在方向盘上作用10 N·m的转矩,持续1 s后变为0,模拟驾驶员松开方向盘后自动回正过程,对比无回正控制和有回正控制两种情况仿真结果。
由仿真结果可知,若未加回正控制,车速在30km/h时,松开方向盘后,由于回正力矩不足,方向盘没有回到中间位置;车速在60 km/h时,松开方向盘后,由于回正力矩过大而出现超调现象,方向盘停留位置超过中间位置;车速在90 km/h时,松开方向盘后,方向盘转角出现振荡现象,没有回到中间位置。但加入回正控制后,在各车速下松开方向盘,方向盘都能回到中间位置,验证了本文中回正控制的有效性。
经过上述仿真实验,表明采用模糊自适应PID控制的电动助力转向系统模型,符合本文基本设计要求,可以导入dSPACE系统进行硬件在环实验。
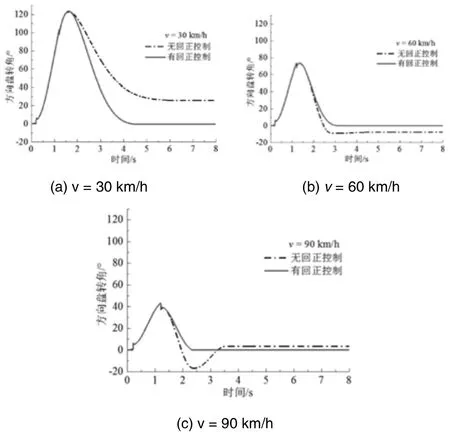
图4 方向盘回正控制仿真结果
3 硬件在环实验
硬件在环仿真(Hardware-in-the-Loop Simulation,HILS)是指在仿真系统中引入实物硬件,与物理仿真模型相结合的实时动态仿真技术。dSPACE实时仿真系统是基于 Matlab/Simulink软件控制系统开发、半实物仿真测试的工作平台,能够完成系统建模、控制分析、离线仿真、实时仿真整个过程。
本文通过搭建EPS系统快速控制原型试验平台,模拟方向盘转矩输入,向dSPACE发送信号,采集助力电机的电压输出曲线,对所提控制策略进行验证。
图5为车速在40 km/h时,输入幅值为15 N·m,频率为0.2 Hz的方向盘转矩正弦信号,可得周期为5 s,幅值为12 V的梯形电压输出。
可得,当方向盘转矩| Th|≤2 N·m 时,电机无助力输出;当2 N·m<| Th|≤8 N·m时,电机电压随着转矩的增大而增大;当| Th|>8 N·m时,电机输出维持在幅值不变。
所提控制算法在硬件在环实验上的控制效果和离线仿真效果相匹配,表明所提控制策略能满足实际要求,可用于实车控制器的硬件设计开发。

图5 方向盘转矩-电机电压图( v = 40 km/h, | Th |max = 15 N·m )
4 结论
本文完成了基于模糊PID控制的四轮驱动汽车电动助力转向控制策略的设计,并进行了验证。
(1)对于基本助力控制,对比不同工况下方向盘转角与方向盘转矩的关系,可知较好地兼顾了低速转向轻便性和高速转向路感;对于回正控制,对比不同工况下方向盘转角的变化,可知有回正控制后方向盘回正准确度有明显提升。
(2)硬件在环实验表明,当方向盘转矩输入在合理的变化范围内时,电机电压的变化趋势符合原有控制策略设定的变化趋向,满足助力曲线变化要求。本文所提的电动助力转向控制策略在实际硬件上的应用与离线仿真效果相一致,满足需求。
[1] Kim S. Pyo J.A.. A control strategy for kickback reduction using electric power steering and conbined chassis control[J]. SAE Techni-cal Paper, 2007. 01.3658.
[2] 江浩斌,杨晓峰,宋海兵等.电动助力转向系统组合型助力特性研究[J].汽车技术, 2010(06): 17~20.
[3] 李绍松.基于转向性能的电动助力转向控制参数灵敏度分析及优化[D] . 吉林:吉林大学, 2013.
[4] 杨杰,冉光伟,马乐等.四轮驱动汽车电动助力转向系统控制策略研究[J]. 汽车实用技术, 2017.14: 65~68.
[5] 姜立标,丘华川,吴中伟等. 四轮驱动汽车牵引力控制系统控制策略[J]. 北京航空航天大学学报, 2016.42(11):2289~2298.
[6] 何华.基于dSPACE的汽车电动式动力转向系统控制策略研究[D].广州:华南理工大学, 2015.
Research on EPS control strategy of Four-wheel Drive Vehicle
Yang Jie1, Ran Guangwei2, Ma Le3, Chen Qiaofang3
( 1.School of Mechanical and Automotive Engineering, South China University of Technology, Guangdong Guangzhou 510640; 2.Automotive Engineering Institute Guangzhou Automobile Group Co., Ltd., Guangdong Guangzhou 511400; 3.Guangzhou college of South China University of Technology, Guangdong Guangzhou 510800 )
U461.1 文献标识码:A 文章编号:1671-7988 (2017)18-192-03
10.16638/j.cnki.1671-7988.2017.18.067
杨杰,硕士,就读于华南理工大学、主要从事车辆系统动力学与电子控制研究。*基金项目:国家自然科学基金项目(51305139)。
猜你喜欢
当代水产(2022年6期)2022-06-29
防爆电机(2022年2期)2022-04-26
汽车实用技术(2022年7期)2022-04-20
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
汽车维修与保养(2019年1期)2019-05-05
汽车电器(2018年12期)2019-01-04
新传奇(2018年47期)2018-08-09
电机与控制学报(2018年9期)2018-05-14
汽车维护与修理(2018年1期)2018-04-04