PL-2400排土机支撑车限位装置优化
2017-10-16 09:32:16杨万坤普伟林
露天采矿技术 2017年10期
杨万坤,普伟林
(云南省小龙潭矿务局,云南 开远 661699)
PL-2400排土机支撑车限位装置优化
杨万坤,普伟林
(云南省小龙潭矿务局,云南 开远 661699)
通过对排土机受料臂支撑车限位装置优化前后使用的限位开关的工作原理和在工作中的作用进行对比,找出原有限位开关在生产过程中存在的缺点及造成的设备隐患,从而说明了限位装置优化在生产中的重要性及必要性。
排土机;受料臂;支撑车;限位开关
Abstract:Through comparing the working principle of limit switch and role in the work before and after optimization of dumping machine by the discharge arm supporting vehicle spacing device,the article finds out the disadvantages and hidden trouble of old limit switch in the process of production,illustrates the importance and necessity of spacing device optimization in the production.
Key words:dumpingmachine;arm;supporting vehicle;limit switch
0 引言
排土机是露天煤矿连续或半连续开采成套设备的一部分,它与胶带运输机配套,适用于露天矿排土场和料场疏松物料的排弃和堆集用。排土机按行走装置分为履带式、步行式、轨道式和步行轨道式等。履带式排土机应用最广泛,源于其移动性能较好,履带式排土机排土,相对于其它排土方法,由于其作业是连续的,故生产能力大,一次排弃宽度大,辅助作业时间少,自动化程度高。
小龙潭矿务局布沼坝露天煤矿使用的排土机型号是PL-2400,其生产能力最大为2 400 m3/h,整机重为240 t,受料臂相对最小夹角为±80°,总装机容量为420 kW,整机外形尺寸为:65.17 m×9.72 m× 15.71 m(长 ×宽×高),排料半径为40 m,受料半径为18±1.5 m,上排高度为15 m,下排高度为3 m,受料臂胶带宽1.4 m、运行速度4 m/s,排料臂胶带宽1.4 m、运行速度4.5 m/s。排土机可分工作状态和转场行走状态2种工况,工作状态时受料臂尾部搭在支撑车滚轮上,配重小车在平衡梁的最后端,排料臂进行排料[1]。PL-2400型排土机结构如图1所示。
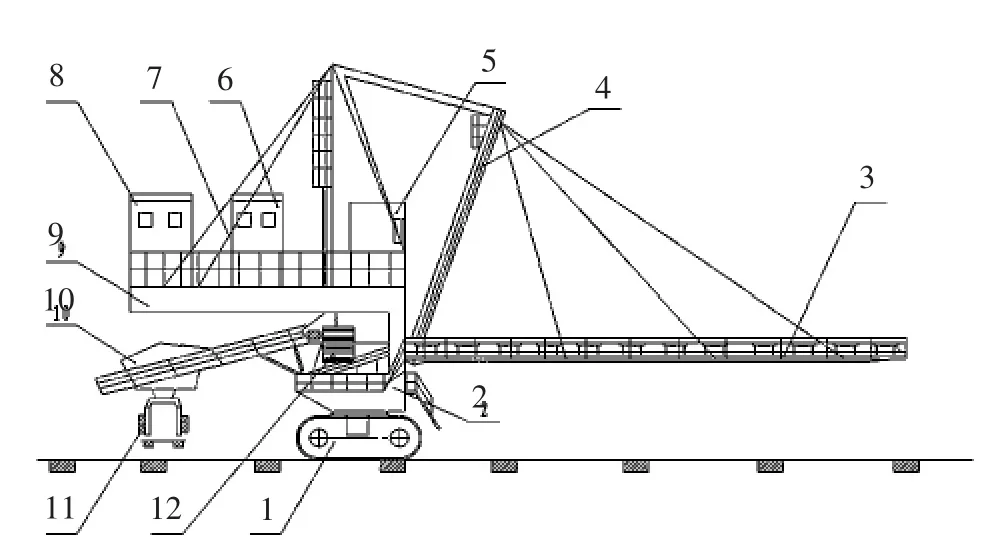
图1 PL-2400排土机结构示意图
PL-2400型排土机主要由排料臂、司机室、回转装置、下部钢结构、主机行走装置、维修室、支承车行走装置、受料臂、排料臂、配重块等组成。排土机可行走移动,可扭车转向;排料臂可变幅、回转、移动排料。排土机支撑车位于受料臂下部,支撑车的作用是支撑排土机受料臂、在胶带输送机轨道上前、后移动、受料槽与落料口对位。改善了受料臂的受力条件,减轻了排土机整机重量,而且轨道式支撑车在地面胶带机的轨道上行走,使得向排土机物料转载工作变得简单可靠。支撑车分为履带式和轨边式2种,PL—2400型排土机采用轨道式支撑结构如图2所示。

图2 支撑车结构示意图
轨道式支撑车为自行式浮动支承台架,主要由回转支架,支撑装置,行走驱动装置,被动轮装置等组成。其上部支承受料臂的回转支架可作360°回转,中间支撑装置横跨胶带两侧,下部行走车轮支承在地面胶带机轨道上,通过两侧的驱动装置可进行向前、向后行走。
1 限位开关的工作原理及分类
限位开关又称行程开关,限位开关就是用以限定机械设备的运动极限位置的电气开关,可以安装在相对静止的物体上或者运动的物体上。当动物接近静物时,限位开关的接点引起闭合的接点分断或者断开的接点闭合,由开关接点开、合状态的改变去控制电路和电机。
限位开关有接触式的和非接触式的。接触式限位开关有一个机械触头,机械设备的运动部件上安装接触式限位开关,与其相对运动的固定点上安装极限位置的挡块,当行程开关的机械触头碰上挡块时,切断了(或改变了)控制电路,机械就停止运行或改变运行。由于机械的惯性运动,这种行程开关有一定的“超行程”以保护开关不受损坏。非接触式开关是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,常见的有光电式、感应式等[2]。
综上可知,接触式限位开关与非接触式限位开关具有很大的差别。首先,接触式限位开关顾名思义,需要接触才能动作,而非接触式开关则不需要接触即可动作;其次,非接触式限位开关的探测距离有远有近,一般为10~100 mm,而接触式开关可动距离有限[4]。在我们使用的环境对2种开关进行比较,非接触式开关使用效果优于接触式开关。
2 限位开关优化原因分析及优化方案
2.1 限位开关优化前使用效果
我单位之前使用的限位开关是接触式限位开关,这种限位开关设计时存在一定的“超行程”可以保护开关,这个“超行程”的大小虽然可以通过选型来改变,但是这对于大型设备来说可能就会有所不足。我单位使用排土机的受料臂移动速度虽然不快,但是惯性大,当受料臂移动到与限位开关触头接触的时候,限位开关才会动作,限位开关虽然有“超行程”保护,但是我们设备上使用的限位开关“超行程”有时并不能完全抵消设备惯性产生的行程,所以使用的接触式限位开关会被设备撞击损坏[3],接触式限位开关控制原理如图3所示。
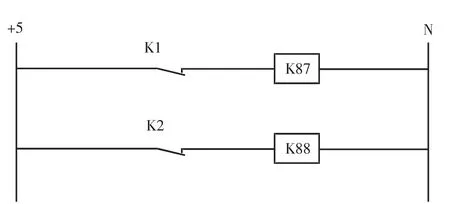
图 3 限位开关优化前控制原理
结合上图可知,当受料臂滑动至极限位置时必须与限位开关接触、动作,控制行走接触器才会动作,控制排土机停车。虽然接触器已经及时动作,但是排土机存在惯性,还会有稍微的前进,这就可能会使限位开关受到冲击导致损坏,如果设备行走速度很快,严重时还可能造成受料臂脱离轨道。
2.2 限位开关优化原因分析
通过对优化前限位开关使用效果研究可知,造成设备安全隐患及故障的原因有2点:首先是受料臂轨道移动距离限制:受料臂尾部安装在支撑车轨道上存在滑动的极限距离,当滑动的距离超出极限距离后,就会存在设备脱离轨道的安全隐患;其次,接触式限位开关需要接触才能控制接触器动作,从而控制排土机行走停车,这存在限位开关损坏的可能性很大[6]。
2.3 限位开关优化方案
综合以上2点原因,做出优化方案:首先,重新测量、确定排土机在生产过程中履带行走前、后移动的最大距离(极限距离),以确定受料臂在支撑车轨道上滑行的距离;其次,安装非接触式限位开关既可以实现受料臂前、后移动的限位功能,又能减小限位开关损坏的可能性。
首先,选择剥离系统不生产的时间段来测量排土机受料臂与支撑车轨道移动的前、后极限距离,确定了限位开关的安装位置,在确定安装位置之前我们预留了安全距离,以满足设备惯性移动的距离,这样就可以消除由设备惯性带来的安全隐患[7]。
其次,把接触式限位开关更换为非接触式限位开关(接近开关),根据重新测量、确定的安装位置来进行安装,新安装的限位开关最大感应距离为80 mm,这个距离可以有效的缓解因设备惯性对限位开关的冲击损坏,从而减小了限位开关损坏的可能性。限位开关安装位置如图4所示,限位开关安装在受料臂滑行轨道两端,探体(感应块)安装在支撑车滚轮基座两侧(共4块)。限位开关接线、控制原理如图5所示,当限位开关探测到探体(感应块)时,限位开关控制继电器K1或K2线圈得电,继电器K1或K2辅助触点由常闭变为常开,从而控制接触器K87或K88(接触器K87控制排土机左履带前进、后退,接触器K88控制排土机右履带前进、后退),达到了控制排土机行走的目的[8]。

图4 限位开关安装位置示意图

图 5 限位开关接线、控制原理图
2.4 限位开关优化达到的效果、目的
由图3与图5比较可看出,不仅对限位开关进行了更换,同时还对接线、控制电路进行了改进。首先,通过限位开关的优化,将接触式限位开关更换为非接触式限位开关(接近开关),这样既达到了保护限位开关不被损坏的目的,同时也实现了对排土机受料臂移动的限位功能;其次,因为更换后的限位开关(接近开关)需要提供独立的电源,所以在电路中增加了单独的电源模块。(注:独立的电源必须符合限位开关的使用电压等级要求)
优化后的限位开关经过近1 a的试用,几乎未发生过设备故障,减少限位开关被损坏的几率,消除了排土机受料臂滑落支撑车轨道的安全隐患。安全生产是参与生产各环节相关人员及企业负责人应该时刻关注的,生产因素包含很多,比如人、机、环境等,这就造成了生产过程的复杂多变,只有人的安全意识到位,机械、设备的运行情况正常,管理制度完善,管理到位,才能保证安全生产。生产安全,人和设备就安全,人和设备安全了,就能避免生产事故的发生。
3 结 语
该优化方法,虽然设计简单,所用材料少,资金投入不大,但所起的作用是显而意见的。限位装置优化、使用一年时间,故障率低、无器件损坏,限位装置优化之前,排土机行走都要小心操作,而优化之后操作方便,消除了设备在生产过程中的安全隐患,保证了设备和人员的安全,提高了设备的可靠性,保证了系统的有效生产时间及工作任务的顺利完成。在如今严格要求生产安全的大环境下,确保生产安全是第一要素,安全生产要时刻牢记十二字方针“安全第一、预防为主、综合治理”,只有保证安全,才能确保正常生产,排土机支撑车限位装置优化,排除了一个重要的生产安全隐患,减少了设备的故障率,体现了限位装置优化在生产过程中的重要性及必要性。
[1]PL—2400型排土机培训教材,安全操作说明书.
[2]郁有文.传感器原理及工程应用[M].西安:西安电子科技大学出版社,2001.
[3]王建.维修电工(技师、高级技师)国家职业资格证书取证问答[M].北京:机械工业出版社,2006.
[4]王俊峰.电力产品的设计与制作[M].北京:北京理工大学出版社,1995.
[5]黄小安.传感器日常应用尝试[M].北京:科学出版社,2002.
[6]范科.常用电子传感器参数手册[M].北京:工业出版社,2001.
[7]郁有文.传感器原理及工程应用[M].西安:电力科技出版社,2010
[8]武昌俊.自动检测技术及应用[M].北京:机械工业出版社,2005.
【责任编辑:张东旭】
Optim ization of lim it device of PL-2400 dum ping machine supporting vehicle
YANGWankun,PUWeilin
(Yunnan Province Xiaolongtan Mining Bureau,Kaiyuan 661601,China)
TD422.4+1
B
1671-9816(2017)10-0053-04
2017-06-05
杨万坤(1990—),男,毕业于昆明理工大学自动化专业,现任云南省小龙潭矿务局机修总厂设备管理部电气技术员。
10.13235/j.cnki.ltcm.2017.10.016
杨万坤,普伟林.UPL-2400排土机支撑车限位装置优化[J].露天采矿技术,2017,32(10):53-55.
猜你喜欢
橡塑技术与装备(2023年2期)2023-02-10 02:36:20
中国特种设备安全(2022年6期)2022-09-20 02:53:48
模具制造(2020年6期)2020-08-03 02:16:58
哈尔滨轴承(2020年4期)2020-03-17 08:13:40
模具制造(2019年10期)2020-01-06 09:13:00
中国矿山工程(2019年1期)2019-03-01 12:29:48
世界有色金属(2018年8期)2018-06-28 07:33:52
猪业科学(2018年4期)2018-05-19 02:04:36
中国矿山工程(2018年2期)2018-05-04 05:10:11
现代矿业(2016年4期)2016-06-16 07:02:58