矢量控制异步发电机对输出功率的响应分析
2017-10-13 05:48:21袁同军丁长健
船电技术 2017年4期
袁同军,丁长健
矢量控制异步发电机对输出功率的响应分析
袁同军,丁长健
(中海油能源发展股份有限公司,天津300000)
建立绕线式异步电机矢量控制变速恒频发电系统的分析模型,研究该系统对输出功率的动态响应特性。通过理论推导,在MATLAB中编写S-Function建立绕线式异步电机矢量控制变速恒频发电系统数学模型。并结合具体参数算例分析输出功率动态调节情况下的系统动态响应波形,表明矢量控制的有效性及控制模型合理性。
矢量控制 异步发电机
0 引言
矢量控制技术最早由德国学者Blaschke等人提出[1],其本质是一种解耦控制。异步电机的矢量控制就是以电机空间磁场矢量的方向作为一个基准方向,建立坐标系,通过相应的坐标变化及数学运算,将异步电机的定子电流分解为方向相互垂直的励磁电流分量和转矩电流分量,可以实现对异步电机的磁通和转矩的分别控制[2-4]。
本文根据矢量控制原理,建立绕线式异步电机变速恒频发电系统的矢量控制分析模型,接着在MATLAB中利用S-Function构建相应的仿真模型,并对仿真中输出功率动态调节情况下的系统动态响应情况进行分析。
1 异步电机变速恒频发电原理
绕线式异步电机变速恒频发电运行的基本原理是:在转子绕组内通入转差频率的、幅值和相位可调的交流电流,控制定子输出电压的频率、幅值和相位与电网严格一致,并有效控制电机的输出功率和功率因数。利用矢量控制技术,可实现机电之间的充分解耦,使原动机转速不受发电机输出(电网)频率的限制,同时,发电机输出电压(或电流)的频率、幅值、相位也不受转子速度和瞬时位置的影响,变传统的刚性约束为柔性联系[5]。
2 绕线式异步电机矢量控制模型
首先建立绕线式异步电机矢量控制变速恒频发电系统的分析模型。为简化分析,讨论直接在同步速参照系内进行,并假定定子侧正方向服从发电机惯例,而转子侧服从电动机惯例,电机气隙均匀,定、转子三相对称,Y连接。
可得,电机的磁链方程和电压方程为:
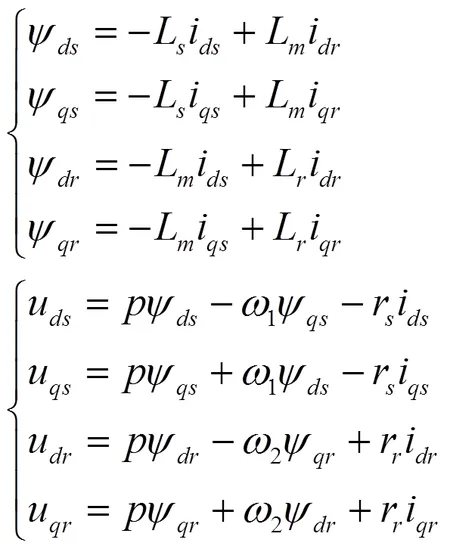
此外,由一般化公式,电机的电磁转矩T和转子运动方程为
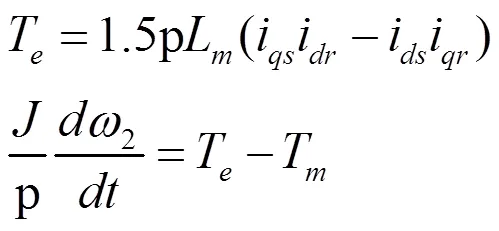
式中,T为原动机驱动转矩。
取q轴与定子电压综合矢量U重合,即给定矢量控制约束条件为:
u=0,u=U
式中,U为定子电压(电网电压)幅值。由此,可绘出电机在同步速参照系中的矢量图及其与三相静止坐标系的关系,如图1所示。
于是,当定子输出功率和功率因数一定时,参照上图1,可以将定子电流指令值(右上角加“*”表示)的d、q轴分量表示为:

式中,1为定子输出功率。
利用以上电机磁链方程和电压方程,以及指令表达式,令微分算子为零,可解得转子d、q轴电流和电压的稳态值(亦即控制指令值)分别为:
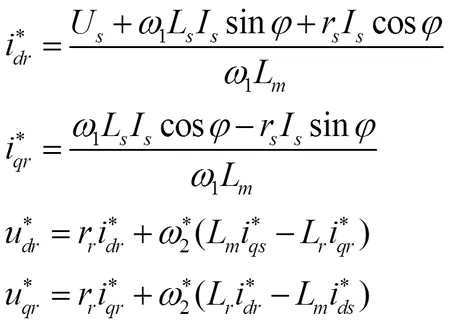
由此可知,当电网电压和频率一定后,严格以转差频率交变的转子电流只是定子功率因数和定子输出功率(亦即定子电流)的函数,而据此控制转子电流或电压,也就可以简单而有效地控制给定的定子电流和给定的定子电压的幅值和相位,并调节电机的输出功率和功率因数。
利用Taylor展开法,仿线性化模型的一般化建模过程,可得转子电压的动态控制方程:
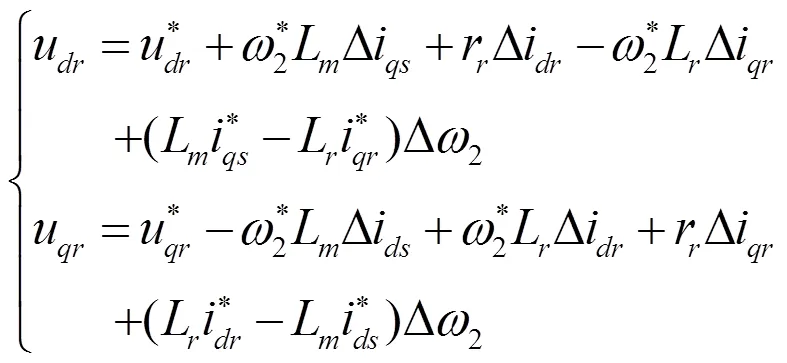
式中,各状态变量的增量统一定义为
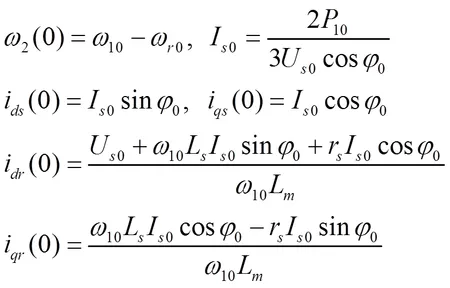
设实施动态调控前电机以速度ω0稳态运行,定子电压、频率、输出功率和功率因数分别为U0、10、10和cos则初始条件可由如下式子确定:
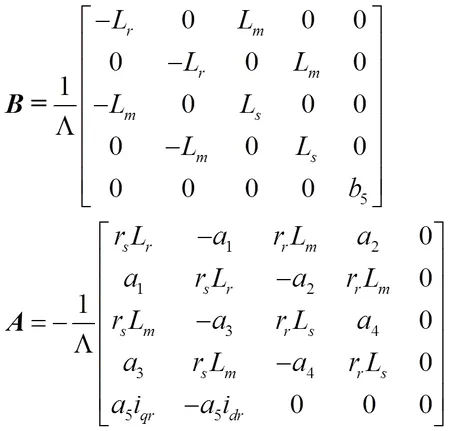
根据上述绕线式异步电机矢量控制变速恒频发电系统数学模型,在MATLAB中编写S-Function。
3 系统动态响应分析实例
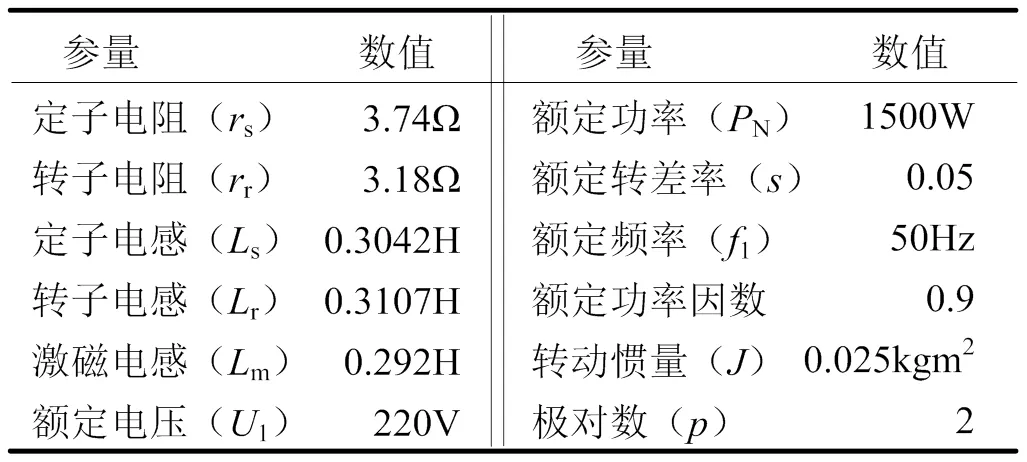
建模所用三相绕线式异步发电机参数如表1所示,转子由VVVF理想正弦波电源供电,以简化分析计算程序。
表1 三相绕线式异步发电机参数表
3.1 建模
输出功率P1由1.5 kW→1.8 kW→1.5 kW→1.2 kW→1.5 kW的动态调节过程(期间,、s保持为额定值)。指定各次跳变的时间为0.1 s、0.3 s、0.5 s、0.7 s。
所用仿真模型框图如图2所示。
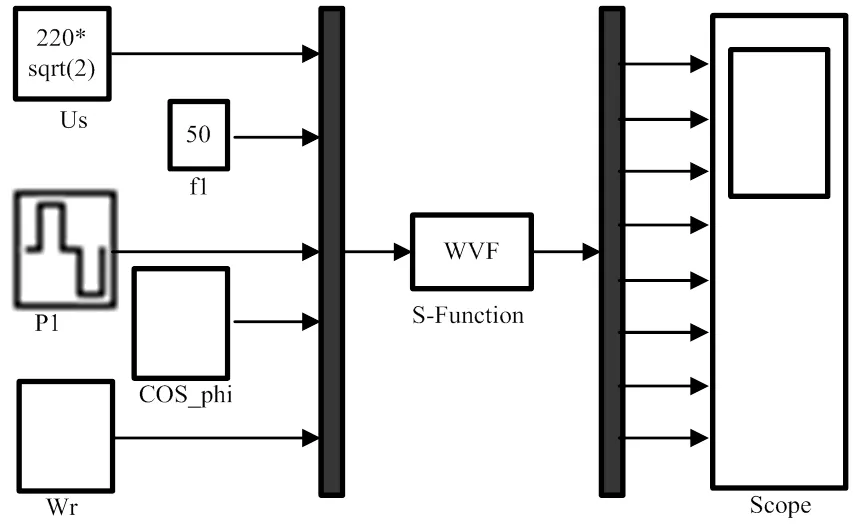
图2 变定子输出功率P1时仿真框图
得到输出结果如图3所示。
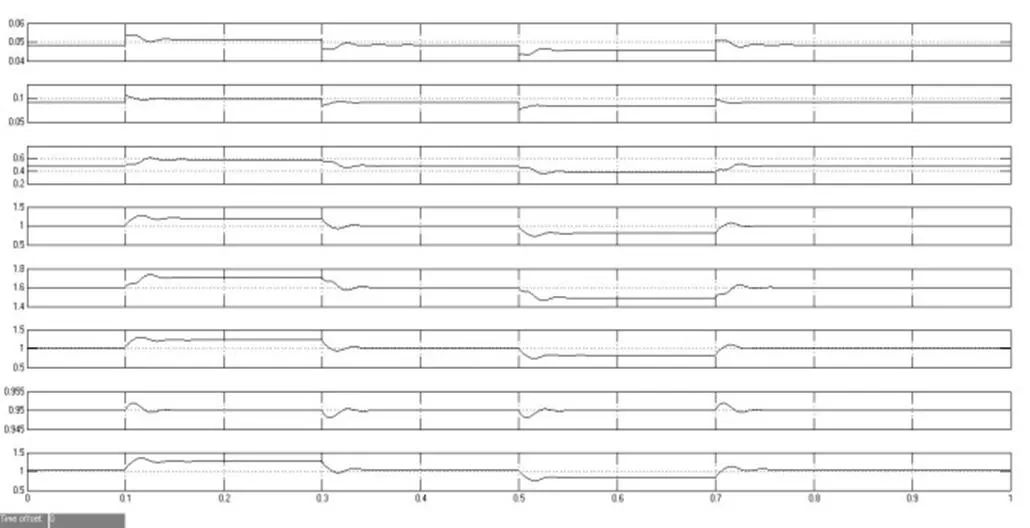
图3 定子输出功率P1从1.5 kW→1.8 kW→1.5 kW→1.2 kW→1.5 kW的动态调节过程
3.2 结果分析
观察图3,虽然定子输出功率和功率因数的瞬间调节幅度都比较大,但由此引起的电磁扰动却并不显著,动态调节和跟踪控制过程时间均比较短,变化也比较平缓,这实际上说明了矢量控制的有效性。而整个调节过程中速度的变化甚微,几乎没有影响,进一步表明机电之间的解耦是比较成功的,控制模型是合理的。
4 结论
本文在MATLAB/Simulink环境下采用矢量控制技术对绕线式异步电机变速恒频发电系统进行了仿真,分析了在输出功率变化情况下系统的动态响应性能,仿真结果表明,该绕线式异步电机矢量控制变速恒频发电系统分析模型可充分实现异步电机机电之间的解耦,可有效应用于系统动态响应特性分析。
[1] 张春喜, 廖文建, 王佳子. 异步电机SVPWM矢量控制仿真分析[J]. 电机与控制学报, 2008, 12(3): 160-163.
[2] 石严, 刍议. 异步电动机转子磁场定向矢量控制系统[J]. Science & Technology Information, 2009, 3(1): 525.
[3] 曹先庆, 朱建光, 唐任远. 基于模糊神经网络的永磁同步电机矢量控制系统[J]. 中国电机工程学报, 2006, 26(1): 137-141.
[4] 杨圣蓉, 王剑平, 张果. 基于SVPWM的异步电机矢量控制及调节器设计实现[J]. 电气自动化, 2015, 37(1): 17-20.
[5] 辜承林. 机电动力系统分析[M]. 武汉: 华中科技大学出版社, 1998.
Response of Vector Controlled Asychronous Generator to Output Power
Yuan Tongjun, Ding Changjing
(1. CNOOC Energy Technology & Services Limited, Tianjin300000, China)
TP391.9
A
1003-4862(2017)04-0047-03
2016-12-26
袁同军(1971-),男,工学学士。研究方向:船舶机电工程。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:34:14
防爆电机(2020年6期)2020-12-14 07:17:04
防爆电机(2020年5期)2020-12-14 07:03:58
防爆电机(2020年4期)2020-12-14 03:11:16
装饰装修天地(2019年23期)2019-12-10 09:56:55
制造技术与机床(2019年11期)2019-12-04 05:50:36
电测与仪表(2017年11期)2017-12-26 01:03:22
电子制作(2017年20期)2017-04-26 06:57:36
电测与仪表(2016年8期)2016-04-15 00:30:06
通信电源技术(2016年5期)2016-03-22 01:09:50