
峰值电流控制模式中的自适应斜坡补偿技术
2017-10-12 07:28:03张普杰王卫东
网络安全与数据管理 2017年18期
张普杰,王卫东
(桂林电子科技大学 信息与通信学院,广西 桂林 541004)
峰值电流控制模式中的自适应斜坡补偿技术
张普杰1,王卫东2
(桂林电子科技大学 信息与通信学院,广西 桂林 541004)
为了解决PWM(脉冲宽度调制)峰值电流模式中当占空比大于50%时发生次斜坡振荡的问题,提出了一种当输入输出电压变化时补偿量跟随变化的斜坡补偿电路方案。与固定斜坡补偿电路相比,本文设计的自适应补偿电路有更好的跟随性,还可避免发生过补偿问题。电路采用gpdk090 CMOS工艺仿真,由仿真结果可知,该电路可以很好地抑制次谐波振荡,提高电路的稳定性和性能。
自适应;占空比;峰值电流模式;斜坡补偿
Abstract: In order to Solve the problem of sub-harmonic oscillation in PWM peak current mode for duty cycle more than 50%, this paper presents a self-adaptable slope compensation circuit, whose compensation amount varies with input and output voltage automatically. Compared with fixed slope compensation circuit,the adaptive compensation circuits designed in this paper have better follow,also can avoid compensation. The circuit was simulated based on gppdk090 CMOS process. The results show that the circuit could effectively suppress sub-harmonic oscillations and improve stabilization of circuit and performances.
Key words:self-adaptation; duty cycle; peak current mode; slope compensation
0 引言
电流模式和电压模式是开关电源中主要的控制模式,脉冲宽度调制(PWM)电流模技术是现在开关电源管理技术中最常用的控制方法。但PWM电流控制技术也有其自身的缺点:当占空比大于50%时,电流模式控制电路不可避免地会呈现不稳定现象。因此为保证系统能正常工作,必须加入补偿电路,来消除开环不稳定现象。
相比于固定斜率补偿方法会出现过补偿的问题,本文介绍了一种自适应斜坡补偿方法,该方法结构简单,易于实现。文中对提出的电路方案给出了详细的分析过程、电路结构和仿真结果。仿真结果表明,提出的电路结构可以满足设计要求,提高系统的稳定性和性能。
1 斜坡补偿概述
图1、图2中,D为占空比,T为时钟周期,实线表示没有加干扰前电感电流的波形,虚线表示加入一个干扰ΔI0后电感电流的波形[1]。
Ve为电压反馈回路的误差放大器的输出,m1、m2分别为电感电流的上升、下降斜率。ΔI0、ΔI1分别表示电感电流的变化量。由图1、2可以直观地看出D<50%时电路的稳定性和D>50%时电路的振荡性。从图1可看出经过一个周期,电感电流的抖动量满足:
图1D<50%时的电感电流波形 图2D>50%时的电感电流波形

(1)
可以证明经过n个周期后,ΔI0引起的电流误差ΔIn为:
(2)
其中:

(3)
由公式(2)可知:当占空比D<50%时,ΔIn将逐渐衰减到0,系统是收敛的;当占空比D>50%(即D>1-D)时,正好相反,ΔIn将逐渐增大,这种情况下系统是不稳定的,将会产生振荡[2]。
为解决当占空比大于50%时发生振荡的问题,固定斜坡补偿电路或自适应斜坡补偿电路是现在主要的两种解决此类问题的方法。图3 所示为固定斜坡补偿原理,电路中叠加一个数值为-m(m>0)的斜坡电流信号,由图得到:
(4)
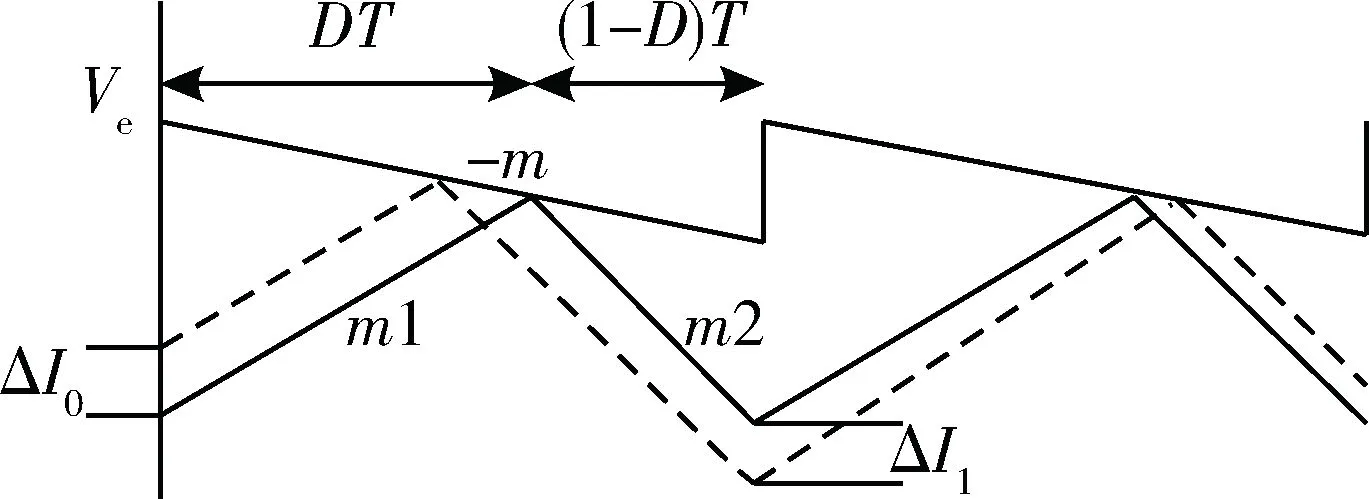
图3 固定斜坡补偿
要使环路保持稳定,需要满足:
(5)
再由公式(3)和式(5)可推得:
(6)
如果取极限情况,让占空比为1,则m的最小值为0.5*m2,一般实际设计中都会大于这个值。
固定斜坡补偿的方法有个最大的缺点是可能会出现过补偿现象,为了防止由于过补偿现象对系统产生影响,文中设计出一种自适应斜坡动态补偿电路:这种电路中占空比会跟着负载的变动而发生改变,重载时占空比会变大,而轻载时占空比会变得非常小,通过电路的自动调节使系统不会出现固定斜率补偿电路时的过补偿现象,从而使系统更稳定。从文献[3]中可以得到:

(7)
(8)
(9)
由式(9)可以看出斜坡补偿斜率和输出输入电压差值(即Vout-0.5Vin)是有直接关系的,最终会为系统提供如图4所示的补偿信号。

图4 自适应斜坡补偿信号波形示意图
随输入输出信号改变的相对应的斜坡补偿信号,既能使系统达到稳定,又可以防止出现过补偿现象。在图4中,实线表示最坏情况下的斜坡补偿波形,虚线表示随着Vout-0.5Vin的差值改变而相对应的斜坡补偿信号波形。在实际的电路实现时,要考虑补偿余度的问题,可使占空比小于0.4(即输出输入电压差变为Vout-0.4Vin)时斜坡补偿斜率为0[4]。
2 自适应斜坡补偿电路实现
图5所示为本文提出的自适应斜坡补偿方案的详细电路结构。

图5 自适应斜坡补偿电路
电路中运放A和NMOS管M2组成电压跟随器结构,M1管栅漏短接可以等效为有源电阻,M5、M6与M1原理一样也相当于有源电阻,其电阻值(假设λ=0)分别可表示为[5]:

(10)
(11)
根据前面分析,为了达到当占空比在40%时使系统开始作用,R6对Vin的分压应为0.4Vin,调节M5、M6的宽长比使其满足M6对Vin的分压。这里由于运放A虚短的特性会使VD2=VD6=0.4Vin。M1相当于有源电阻,所以流过M1的电流I1由Vout和0.4Vin决定,电流大小为:
(12)
电路中M3、M4、M7、M9的宽长比相同,且都为M8、M10的1/X。R1为M1的等效地有源电阻值。也可得到流过M8/10的电流为:
(13)
由式(13)可以看出:斜坡补偿电流Islope的大小与Vout-0.4Vin成线性关系,由此电流会随Vout和Vin变化,电流对电容C1充电的电压也会改变。根据微分公式[6]:

(14)
可得斜坡电压的补偿斜率:
(15)
对于公式(15)只要给出合适的C和X,以及M1的宽长比,就可以得到合适的动态斜坡补偿信号。
图6是该结构中运放A的实际结构图。
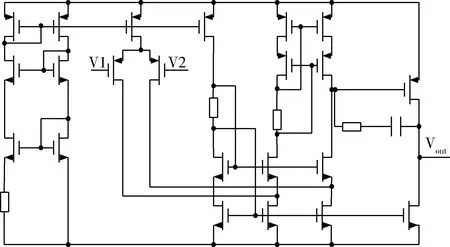
图6 运放A的实际电路结构
3 仿真验证
最后对本文所提出的方案结合一款降压型开关电源变换器,采用gpdk090 CMOS工艺设计,用Cadence软件进行仿真、验证。
仿真结果如图7、8所示,由图可以看出不管输出电压改变还是输入电压改变,系统的动态特性都很好,可以产生相应的斜坡补偿信号,还可避免发生过补偿问题。

图7 输出电压从1.5 V变化到2.5 V时斜坡补偿 电压的变化(Vin=3.6 V)
4 结论
由于PWM电流模式控制电路在占空比大于50%时会出现开环不稳定现象,使系统不稳定,所以本文设计了一种自适应斜坡补偿电路,来避免系统发生振荡。文中详细地分析了产生振荡的原因,并提出了完整的补偿电路方案,对电路进行了仿真、验证。从结果可以看出:文中设计的电路不管输出电压变化还是输入电压变化,系统的动态特性都很好,可以产生相应的斜坡补偿信号,避免发生过补偿问题的同时,很好地改善了系统的性能。
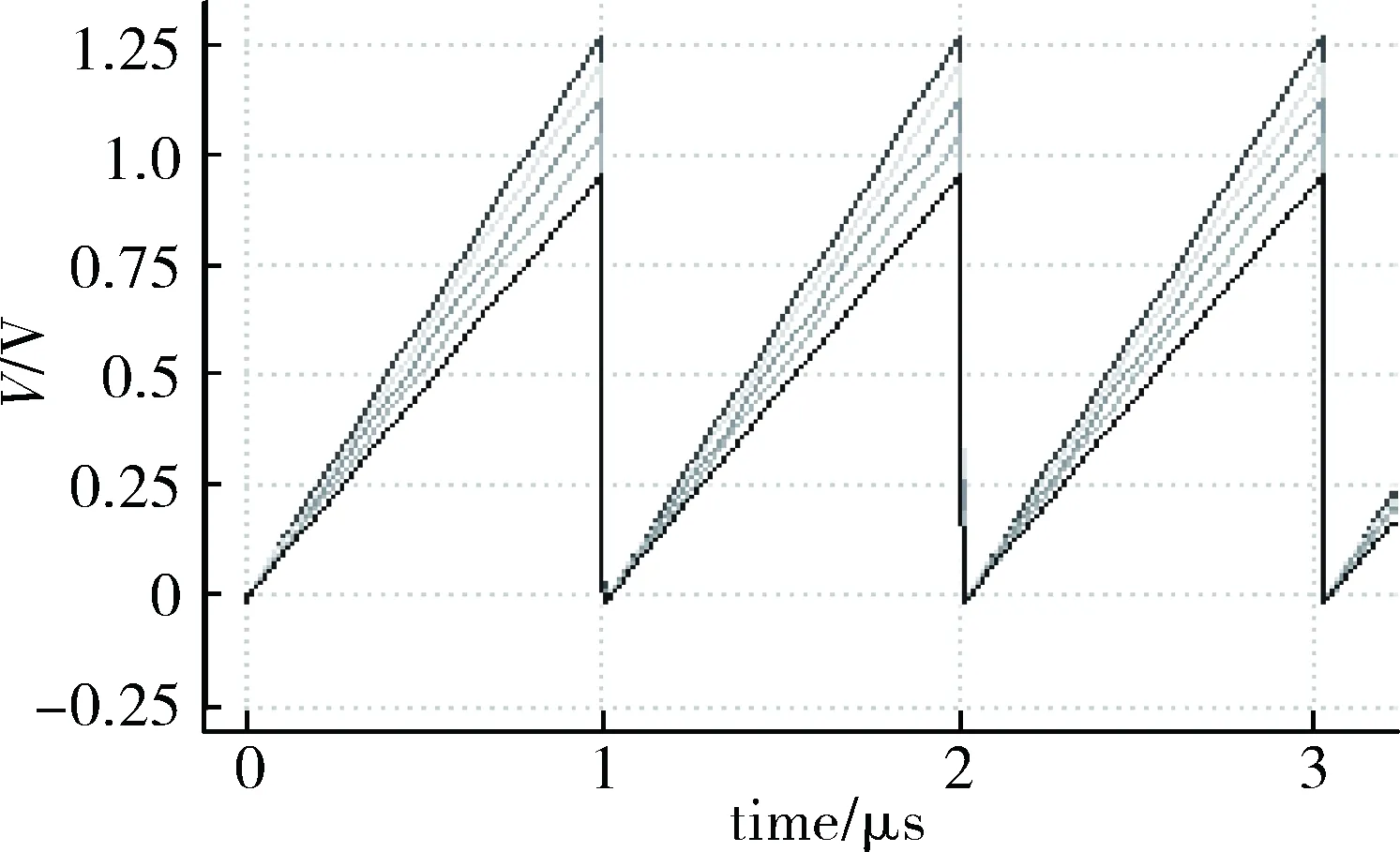
图8 输入电压从2.5 V变到3.8 V时斜坡补偿 电压的变化(Vout=1.8 V)
[1] 陈富吉,来新泉,李玉山.一种自适应斜坡补偿电路的设计与实现[J].半导体学报,2008,29(3):593-596.
[2] 徐辉,胡永贵.一种用于DC-DC变换器的斜坡补偿电路设计[J].微电子学,2014,44(2):141-144.
[3] 王晓光.高速高精度BUCK型DC-DC转换器的研究与设计[D].西安:西安科技大学,2010.
[4] 田锦明,王经卓,曹双贵,等.峰值电流模式变换器自适应斜坡补偿电路设计[J].电子器件,2008,31(2):480-483.
[5] 刘雪飞,丁召,郝红蕾,等.一种降压型DC-DC变换器动态斜坡补偿电路的设计[J].微电子学,2013,43(2):206-209.
[6] 田锦明,王松林,来新泉,等.峰值电流控制模式中的分段线性斜坡补偿技术[J].电子器件,2006,29(3):864-873.
Technology of self-adaptation slope compensation in peak current mode controlled circuit
Zhang Pujie1, Wang Weidong2
(School of Information and Communication Engineering, Guilin University of Electronic Technology, Guilin 541004, China)
TN432
A
10.19358/j.issn.1674- 7720.2017.18.014
张普杰,王卫东.峰值电流控制模式中的自适应斜坡补偿技术[J].微型机与应用,2017,36(18):46-48.
2017-03-25)
张普杰(1991-)男,硕士研究生,主要研究方向:模拟集成电路设计。
王卫东(1956-) 男,教授,硕士生导师,主要研究方向:模拟集成电路与电流模式电路。
猜你喜欢
中国特种设备安全(2021年9期)2021-03-02 05:40:46
当代陕西(2019年6期)2019-04-17 05:03:50
测控技术(2018年2期)2018-12-09 09:00:46
通信电源技术(2018年5期)2018-08-23 01:16:12
天津诗人(2017年2期)2017-11-29 01:24:12
通信电源技术(2016年3期)2016-03-26 07:13:14
防灾减灾学报(2015年3期)2015-12-16 16:15:40
电测与仪表(2015年16期)2015-04-12 00:44:38
电测与仪表(2014年13期)2014-04-04 12:04:16
有色金属设计(2014年4期)2014-03-11 19:43:11
