
无人机垂直陀螺仪及其链路健康状态评估研究
2017-10-11 01:37戴文瑞王建华
重庆理工大学学报(自然科学) 2017年9期
戴文瑞,王建华
(中国人民解放军陆军军官学院, 合肥 230031)
无人机垂直陀螺仪及其链路健康状态评估研究
戴文瑞,王建华
(中国人民解放军陆军军官学院, 合肥 230031)
以无人机垂直陀螺仪及其工作链路为研究对象,采用灰色聚类评估法对陀螺仪节点的健康等级和健康度进行评估,提出将各节点的相互工作关系区分成串联、并联及混联的链路模型,引入不利因子、有利因子和累积指数函数等概念,构造了链路健康状态评估模型,对垂直陀螺仪的工作链路健康状态进行评估,为无人机垂直陀螺仪提供管理使用依据。
无人机垂直陀螺仪;健康状态评估;灰色聚类;累积指数函数
Abstract: The gyroscope vertical gyroscope and its working link are taken as the research object. The gray clustering evaluation method is used to evaluate the health level and health degree of gyroscope nodes. The working relationship of each node is divided into series, parallel and mixed link model. The concept of unfavorable factor, favorable factor and cumulative exponential function is introduced to construct the link health state assessment model. The health status of the working link of the vertical gyroscope is evaluated, and the vertical gyroscope provides management basis for use.
Keywords: UAV vertical gyroscope;health status assessment;gray clustering;cumulative exponential function
无人机作为我军近年来重点发展的高新技术装备,在未来作战中地位越来越重要[1-2]。垂直陀螺仪及其工作链路作为无人机航电系统的重要组成部分,准确掌握其健康状态是保障无人机安全完成任务的重要依据。但目前对垂直陀螺仪的健康状态评估研究大多只停留在理论分析层次,很少有具体的、针对性的健康状态评估指标、评估模型算法等[3-6]。垂直陀螺仪的工作链路由多个节点组成,在考虑节点健康状态向链路健康状态的聚合分析时,目前大多数研究只采用分配权重的方法来得出系统的健康状态,缺少考虑各节点之间的相互关联[7-10]。本文采用灰色聚类评估算法,综合评估得出节点的健康等级和健康度,将各节点的联系关系分为串联、并联以及混联的链路关系进行分析,引入不利因子和有利因子等概念,采用累积指数函数算法构建串联、并联链路的健康状态评估模型,有效解决了垂直陀螺仪及其链路的健康状态评估问题。本方法同样适用于无人机其他工作链路,为无人机健康状态评估提供了一种有效有评估方法。
1 无人机垂直陀螺仪健康状态评估指标
1.1 健康状态评估指标架构
主要包括以下3类指标:① 第1类是能具体检测到的技术参数类指标,根据检测值与规定技术指标的差异确定系统的健康状态; ② 第2类是装备运行管理类相关指标,包括可靠度、运行年限和维修状况等;③ 第3类是将环境外观等客观信息作为评估指标。
1.2 健康状态评估指标分层结构
某型中程通用无人机垂直陀螺主要由转子和框架组成。当飞机在俯仰或倾斜方向有动作时,垂直陀螺会对应输出电压值,通过机载计算机采集及解算得到姿态角度,其健康状态评估指标如图1所示。
1.3 层次分析法计算指标权重
指标权重的确定对分析结果有重要影响,通常权重确定方法有专家打分法、层次分析法、熵值法等,本文采用层次分析法对原始权重进行计算。
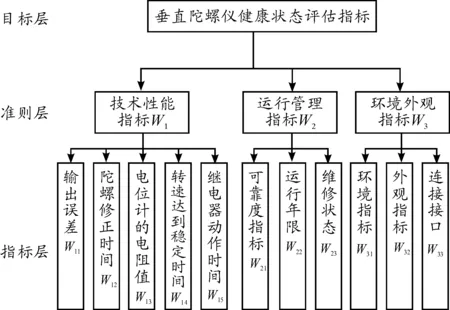
图1 垂直陀螺仪健康状态评估指标
1.3.1 建立判断矩阵
从第2层开始,下一层元素进行两两比较,请专家按其重要程度进行评定等级。评定等级采用9标度法,设aij为第i个元素比第j个元素的重要等级,其9标度重要等级如表1所示。
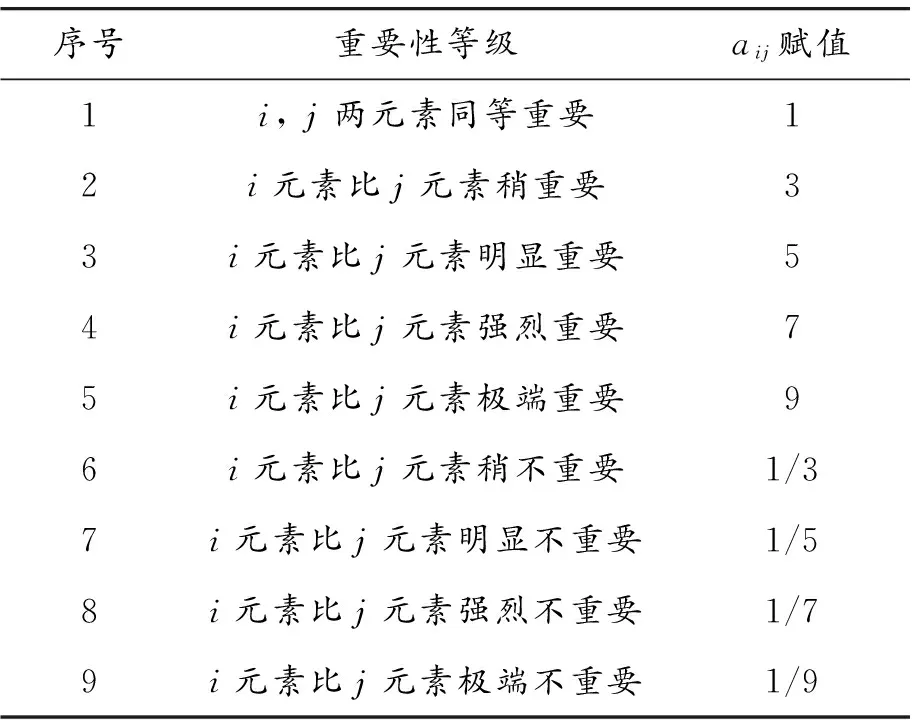
表1 9标度重要等级表
设有n个元素进行两两比较,其构成的矩阵A=(aij)n×n为判断矩阵,aij>0,aii=1,aij=1/aji,即A为正互反矩阵。
1.3.2 层次单排序
将各层次判断矩阵所对应的特征向量归一化,计算出同一层次相应因素相对于上一层次某因素的单层次排序权重,其权重向量为:

(1)
1.3.3 一致性检验
1) 计算一致性指标(CI)
设λmax是判断矩阵的最大特征值,n为判断矩阵的阶数,则有

(2)
2) 计算一致性检验判别式
将一致性指标(CI)对随机一致性指标均值(RI)之比记为一致性比率(CR):

(3)
其中RI为随机一致性指标均值,见表2。
当CR≤0.1时,认为该矩阵的一致性可以接受,如不满足此条件,则应检查调整判断矩阵,直至通过一致性检验。
1.3.4 指标权重总排序
计算出各级指标单排序向量后,假设第1层(目标层)元素层次权重向量为μ,第二层(指标层)元素层次权重向量为ξ,层次总排序权重向量ψ=μ*ξ。
请20名专家对无人机垂直陀螺仪的健康状态评估指标重要性进行打分,经计算其各指标层次权重和组合权重如表3所示。

表2 矩阵阶数为1~9的RI值

表3 指标层次权重及组合权重
2 基于灰色聚类理论的垂直陀螺仪节点健康状态评估模型
2.1白化权函数的确定
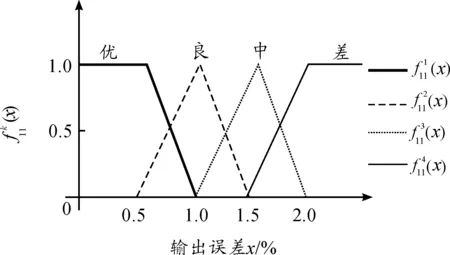
图2 输出误差白化权函数

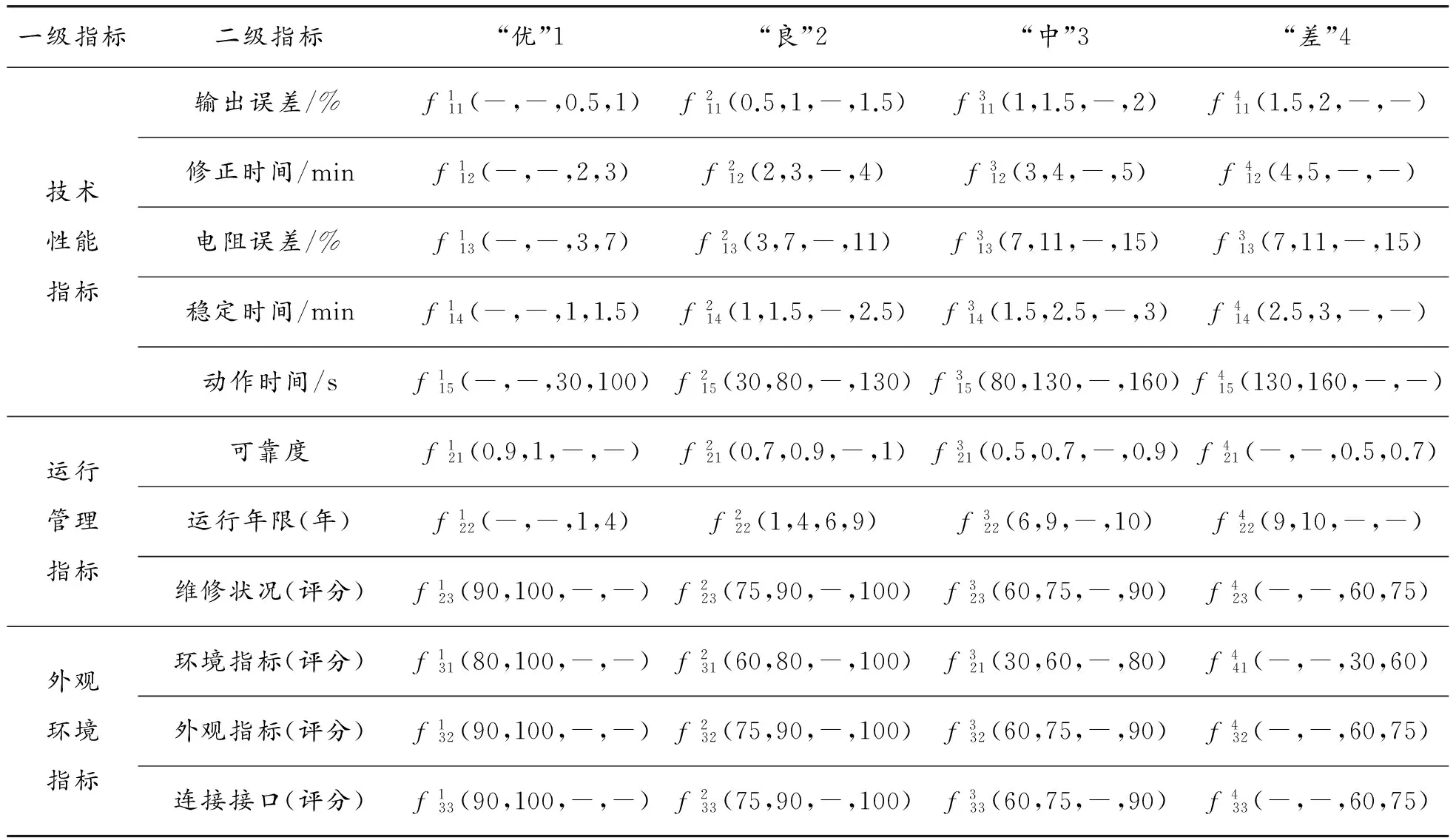
表4 垂直陀螺仪健康状态评估指标白化权函数
2.2计算灰色定权聚类系数和聚类系数矩阵

由灰色定权聚类系数组成的矩阵为聚类系数矩阵B:
(4)
2.3评估健康状态等级和健康度
将聚类系统矩阵B和灰类评分向量E的倒置向量相乘即为健康度:
H=B*ET
(5)
3 基于累积指数函数的无人机航电系统链路健康状态评估模型
3.1串联链路健康状态评估模型
3.1.1 串联链路结构模型
串联链路指在无人机航电系统中,一个链路中的各节点是串联工作的,也就是每个节点都必须工作,链路才能正常工作。设有n个节点串联组成,结构用{H1∩H2∩…∩Hn}表示,假设各节点的健康度已知,分别为:H1、H2、…、Hn,其结构模型如图3所示。

图3 串联链路结构模型
3.1.2 串联链路健康度定性分析
串联节点对链路健康度的影响应符合以下定性描述:① 链路的健康度受各节点健康度共同影响,每个节点的健康度的不利因子都会降低链路的总的健康度;② 随着串联节点的增多,不利因子的不断累积,链路健康度函数应该是递减函数;③ 若节点数足够多,每个节点都存在不利因子,那么串联链路的总健康度的极限应该是0。
3.1.3 串联链路健康度函数
1) 确定节点不利因子dn。不利因子dn表示Hn和最佳状态(1)的偏离程度。设参数累积不利因子x为各节点不利因子之和,即:
(6)
2) 确定健康度函数。纵坐标为健康度,横坐标为累积不利因子x。x=0时,H=1。随着x的增大,节点不利因子之和增多,健康度H随之下降,最终趋向0。串联链路健康度受节点不利因子的影响,设每个不利因子的影响度为Dn,则链路健康度为
(7)
f(x)=e-x
(8)
则不利因子影响度Dn可表示为对应不利影响因子dn与f(x)及y=0围成的面积,如图4所示。

(9)
(e-xn-1-e-xn)=1-e-xn
串链路健康度函数为:
(10)
3.2 并联链路健康状态评估模型
3.2.1 并联链路结构模型
并联链路指在无人机航电系统中一个链路中的各节点是并联方式工作的。设有n个节点并联组成,结构用{H1∪H2∪…∪Hn}表示,其结构模型如图5所示。
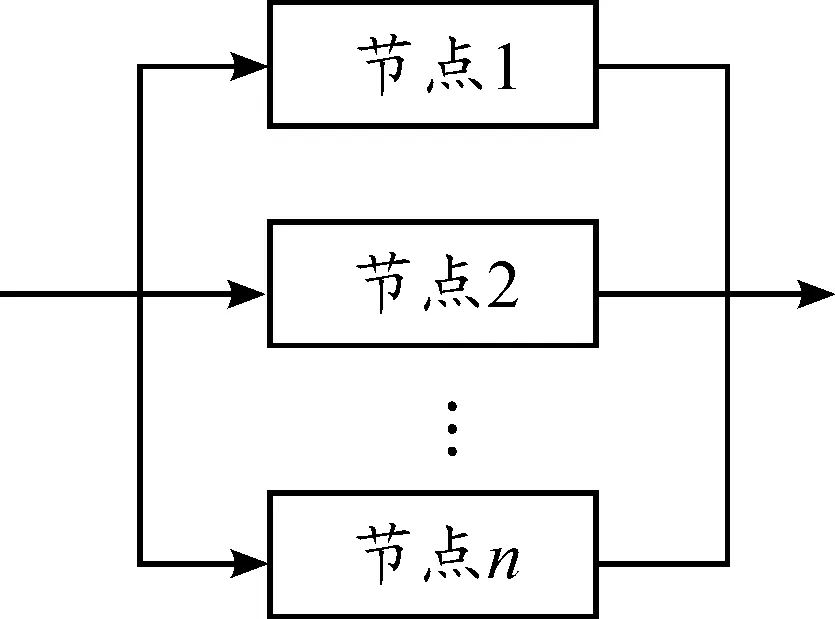
图5 并联链路结构模型
3.2.2 并联链路健康度定性分析
并联节点对链路健康度的影响应符合以下定性描述:① 链路的健康度受各节点健康度共同影响,每个节点都健康度的有利因子都会提高链路的总的健康度;② 随着并联节点的增多、有利因子的不断累积,链路健康度函数应为递增函数;③ 若节点数足够多,每个节点都存在有利因子,那么并联链路的总健康度的极限应为1。
3.2.3 并联链路健康度函数
1) 确定节点有利因子pn。有利因子pn表示Hn和最差状态(0)的偏离程度,即pn=Hn。设参数累积有利因子z为各节点有利因子之和。
(11)
2) 确定健康度函数。纵坐标为健康度,横坐标为累积有利因子z,z=0时,H=0,随着z的增大,节点有利因子之和增多,健康度H随之上升,最终趋向1。并联链路健康度受节点有利因子的影响,设每个有利因子的影响度为Pn,引用数学函数中的函数:
f(z)=1-e-z
(12)
有利因子影响度Pn为对应影响因子pn与f(z)及函数y=1围成的面积,如图6所示。
图6 有利因子累积指数函数示意图
(13)
并链路健康度函数为
(14)
4 实例论证
现有3台垂直陀螺仪分别用T1、T2、T3表示,对检测对象的指标数据进行定性定量分析,得出3台垂直陀螺仪的指标数据检测值,如表5所示。

表5 指标数据检测值
1) 求灰色定权聚类系数


2) 评估健康等级。构造灰色聚类系数矩阵为

可得各垂直陀螺仪的健康等级为:T1属于“优”,T2属于“良”,T3属于“良”。
3) 评估健康度
H=B*ET=
为便于观察理解和计算,对评分进行归一化处理,即健康度H′最高评分为1分,最低为0分。
可得:垂直陀螺仪T1健康度为0.857;垂直陀螺仪T2健康度为0.752;垂直陀螺仪T3健康度为0.722,健康度T1>T2>T3。
4) 垂直陀螺仪正常工作链路分析
在无人机航电系统中,各链路常常是由串联模型和并联模型组成的混联工作模型,计算时可将串联模型计算的健康度作为一个节点代入并联模型,也可将并联模型计算的健康度作为一个节点代入串联模型。垂直陀螺仪正常供电及输出信号链路,其结构如图7所示。
图7 垂直陀螺仪工作链路
设已对链路中各节点的健康状态已进行了评估,其健康度分别用H1、H2、H3、H4、H5、H6、H7表示,分别为:H1=0.9;H2=0.87;H3=0.78;H4=0.95;H5=0.85;H6=0.8;H7=0.9。即先将(H1∩H2)∪(H3∩H4)等效为Ha,计算Ha的值,再将(Ha∩H5)∪H1等效为Hb,计算Hb的值,最后将Hb∩H6∩H7等效为H,计算H的值。
H={{[(H1∩H2)∪(H3∩H4)]∩H5}∪H1}∩H6∩H7
Ha=(H1∩H2)∪(H3∩H4)=e-(0.1+0.13)∪e-(0.22+0.05)= 1-exp{-[(1-e-0.23)+ (1-e-0.27)]}=0.789
Hb=(Ha∩H5)∪H1= 1-exp[e-(0.21+0.15)+0.9]=0.798
H=Hb∩H6∩H7=e-(0.201+0.2+0.1)=0.606
经计算该链路健康度H=0.606,应适当缩短维护周期,加大对该链路的维护检查。
5 结束语
本文采用灰色聚类理论建立了无人机垂直陀螺仪节点健康状态评估模型,得出无人机航电系统的健康等级和健康度,根据健康等级和健康度大小,可为无人机的维修使用提供依据,即健康度越大越应优先使用、推后维护;健康度越小越应优先维护、推后使用。通过采用区分串联链路和并联链路的方式,引入不利因子、有利因子和累积指数函数等概念,构造了复杂装备链路健康状态评估模型,其评估结果充分反映出复杂装备节点之间的相互关系及这种关系对整个系统健康状态的影响,评估的结论可更加直观地为装备管理使用提供决策依据。本文研究方法及成果对评价无人机全系统健康状态及其他武器系统健康状态具有参考意义。
[1] 陈卫,汤超君.基于状态的某型无人机系统维修研究[J].重庆理工大学学报(自然科学),2014(1):102- 104.
[2] 高龙波,李本威,张赟.无人机远航飞行轨迹优化研究[J].兵器装备工程学报,2016,37(3):94-97.
[3] 邵新杰.复杂装备故障预测与健康管理技术[M].北京:国防工业出版社,2013.
[4] 吴波,贾希胜,夏良华.基于灰色聚类和模糊综合评判的装备群健康状态评估方法[J].军械工程学院学报,2009,21(5):34-35.
[5] 周俊杰,王德功,常硕.基于模糊理论的机载电子装备状态评估[J].飞行设计,2011,31(2):33-37.
[6] 潘全文,张观海,刘琪.无人机预测与健康管理体系结构研究[J].飞行设计,2012(6):50-55.
[7] 常琦,袁慎芳.飞行器综合健康管理系统(IVHM)技术现状及发展[J].系统工程与电子技术,2009,31(11):2652-2657.
[8] 李爱军,章卫国,谭键.飞行器健康管理技术综述[J].电光与控制,2007,14(3):79-83.
[9] 窦赛,陈国顺,吕艳梅.基于FMECA方法的无人机航电系统维修决策[J].价值工程,2011,30(33):135-136.
[10] 范晋湘.无人机装备质量管理[M].北京:海潮出版社,2011.
(责任编辑陈 艳)
ResearchonEvaluationofUAVVerticalGyroscopeandItsLinkHealthStatus
DAI Wenrui, WANG Jianhua
(Army Officer Academy of PLA, Hefei 230031, China)
2017-04-26
2015年度全军军事类研究生资助课题(2015JY193)
戴文瑞(1987—),男,安徽巢湖人,硕士研究生,主要从事装备管理与工程研究,E-mail:459545698@qq.com; 王建华(1964—),男,安徽安庆人,教授,研究生导师,主要从事管理科学与工程研究。
戴文瑞,王建华.无人机垂直陀螺仪及其链路健康状态评估研究[J].重庆理工大学学报(自然科学),2017(9):138-144.
formatDAI Wenrui, WANG Jianhua.Research on Evaluation of UAV Vertical Gyroscope and Its Link Health Status[J].Journal of Chongqing University of Technology(Natural Science),2017(9):138-144.
10.3969/j.issn.1674-8425(z).2017.09.022
V279+.3
A
1674-8425(2017)09-0138-07
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
北京航空航天大学学报(2021年9期)2021-11-02
新世纪智能(英语备考)(2018年11期)2018-12-29
百科探秘·航空航天(2017年9期)2017-12-31
山东工业技术(2016年15期)2016-12-01
中国环境监察(2016年7期)2016-10-23
中国现当代社会文化访谈录(2016年0期)2016-09-26
系统工程与电子技术(2016年7期)2016-08-21
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
