
基于超声波电机的线路巡检机器人伺服控制系统
2017-10-09 08:42李轩徐志科周玲金龙戴德嵩潘志翔龚龙中
电气自动化 2017年3期
李轩, 徐志科, 周玲, 金龙, 戴德嵩, 潘志翔, 龚龙中
(东南大学 电气工程学院,江苏 南京 210096)
基于超声波电机的线路巡检机器人伺服控制系统
李轩, 徐志科, 周玲, 金龙, 戴德嵩, 潘志翔, 龚龙中
(东南大学 电气工程学院,江苏 南京 210096)
介绍了一种线路巡检机器人伺服控制系统。控制系统包括了对超声波电机、永磁直流齿轮减速电机等多个电机的协调控制,完成了对高压线路上故障的发现、清除、回收。控制系统以RS232作为主要通信方式,以无线通信作为主要通信途径,保证了机器人在高压线路工作中的可靠性。控制系统通过对机器人工作状态量的采集,保证了机器人能够在规定电量内完成规定的工作量,提高了线路巡检工作的效率。
无线通信;超声波电机;永磁直流齿轮减速电机;状态采集;高压巡检
Abstract: This paper introduces a servo control system for line inspection robots, which includes coordinated control over the USM, permanent magnet DC gear reduction motor, etc. and fulfills discovery, removal and recovery of faults on high voltage lines. Taking RS232 as main communication mode and wireless communication as main communication way, this control system can ensure the reliability of the robot in its operation on high voltage lines. The control system collects the quantity of working state of the robot to ensure that the robot can complete its prescribed work amount in the specified electric quantity, thus improving the efficiency of line inspection.
Keywords: wireless communication; USM; permanent magnet DC gear reduction motor; state acquisition; high voltage inspection
0 引 言
安全可靠的电力供应系统是人们进行日常生活、生产作业的基本条件。长距离电力传输必须依靠高压输电线,其能否安全、稳定运行直接影响到电力系统的可靠性。因此,定期对高压电力线进行巡检与维护是一项十分重要的工作。传统的电力巡检采用人工巡检法和直升机航测法,存在效率低、成本高、工作量大、作业危险等弊端。高压电力线巡检机器人的设计和开发,可以提高巡检效率和精度,降低成本,消除事故隐患[1-2]。本文论述了一种线路巡检机器人伺服控制系统。首先对线路巡检机器人的整体结构进行了介绍,再对该系统中所涉及到的主要部分,包括各个电机的驱动控制,信号的采集,无线通信技术逐一进行分析,最后就机器人的抗电磁干扰进行了简要论述。
1 线路巡检机器人伺服控制系统整体设计
图1(a)和图1(b)所示分别为线路巡检机器人伺服系统的机械结构设计和整体结构设计框图。该系统主要由运动控制系统,信号采集系统,无线通信系统三部分组成:
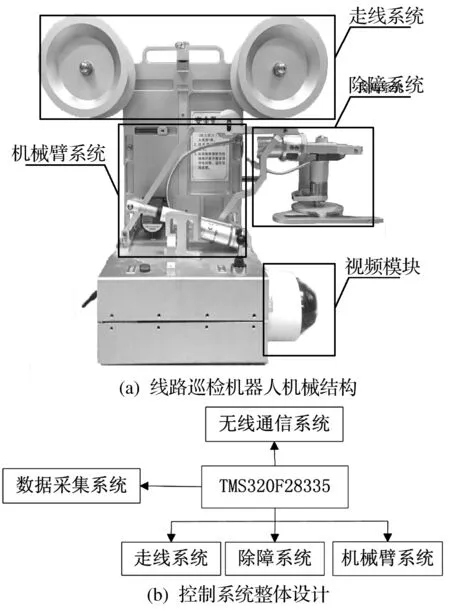
图1 线路巡检机器人
运动控制系统:该系统主要包括三部分:(1)控制机器人行走的走线系统;(2)控制机器人清除高压线路障碍的除障系统;(3)控制机器人机械臂运动的机械臂系统。
信号采集系统:该系统主要用来采集机器人在高压线路上工作时的电压值,电流值以及机器人工作时的电量状态。
无线通信系统:该系统主要用来控制在高压线路上工作的机器人完成指定动作。由于机器人在高压线路上需要进行高强度,远距离,长时间的工作,所以要求无线通信系统需要有较高的可靠性。
2 机器人伺服系统
2.1 机器人走线系统
传统的线路巡检机器人在高压线路上行走时,为了防止线路巡检机器人在线路上停下来清除障碍时,被气流扰动,从而发生前后移动的情况,通常采用大转矩步进电机来保证了机器人在停止时有较大的转矩使其能够可靠的停在高压线路上。但大转矩步进电机在停止工作时需要较大的电流完成自锁,这样需要耗费机器人的大量电量,使得机器人的工作时间缩短。为了提高机器人的工作时长,使得机器人能够完成高强度、远距离的工作,采用性能更好的超声波电机作为机器人走线系统的主要控制电机[3]。超声波电机具有低速大转矩、直接驱动、低运行噪声、断电自锁、控制性能好、响应速度快、无电磁干扰等优良特性,这些特性可以更好的控制线路巡检机器人在高压线路上行走[4]。图2为驱动和控制超声波电机的全桥式逆变电路框图。主控芯片为驱动电路提供4路PWM波,通过推挽式逆变电路的放大及变压器和匹配电路的滤波作用,得到两相高频交变驱动电压,从而驱动电机[5-6]。

图2 超声波电机驱动控制电路框图
2.2 机器人除障系统
当线路巡检机器人检测到高压线路上有障碍物时,会利用切刀将障碍物切断或是剪断,再将剪断的障碍物由收纳装置回收,实现高压线路上的故障清除。该除障系统控制电路控制原理主要是由主控芯片向该电路输入一个控制信号,当该控制信号为高电平时,继电器电路导通,将12 V外部电源接入电机,为电机供电。为了控制机器人的大小,但同时又为了机器人能够彻底清除缠绕在高压线路上的如气球、线团等的障碍物,这里采用的是体积小、力矩大,可实现正反转控制的永磁直流齿轮减速电机。
2.3 机器人机械臂系统
机械臂系统是线路巡检机器人中最重要的组成部分,该部分主要用于整个伺服控制系统中对于高压线路障碍的精确定位,所以该电机的控制电路部分相比较其他电机控制电路,需要有更高的可靠性要求。本系统通过蜗杆传动的方式将电机的旋转运动转变为直线运动。图3所示为机器人机械臂系统驱动控制框图,为了实现机械臂的上下移动即电机的正反转,这里采用驱动芯片为TA8428K驱动电机。DSP控制模块向两路光耦输出两路高低电平,当输出高电平时,光耦芯片导通工作,TA8428K的输入引脚接收到低电平信号;当输出低电平时,光耦芯片关断,TA8428K的输入引脚接收到12 V高电平信号。TA8428K驱动芯片的输入管脚包括IN1和IN2,当两路输入管脚输入不同的电平值的时候,芯片输出管脚输出+24 V或-24 V,控制电机的正反转;当当两路输入管脚输入相同电平值的时候,芯片输出管脚输出0 V,电机停止工作。

图3 机械臂系统驱动控制框图
3 机器人控制系统
线路巡检机器人的动作主要依靠控制系统板发送的动作指令从而完成相应动作,同时控制系统板还需要实时显示机器人伺服系统中信号采集系统采集到的机器人的工作状态,包括机器人工作电压、工作电流、机器人电量。控制系统设计框图如图4所示。

图4 控制系统设计框图
在该控制板中,信号发送按钮所使用的按钮为带LED灯的防水自锁按钮;为了在强光下也能方便观测,采集信号显示采用红色数码管显示。
3.1 机器人信号采集系统
图5为机器人系统信号采集框图和采集电路,该电路采用CSM025A系类霍尔电流传感器,该传感器共有5种连接方式,这里采用匝数比为5∶1 000的连接方式,在该连接方式下,传感器额定输入电压为±12 V~±15 V,额定输入电流5 A,额定输出电流25 mA。采用的电源模块为WD20—24S12C1电源模块,该模块可将24 V电压转变为12 V电压。当外部输入24 V电压时,该电压信号会通过DC—DC电源模块转变成12 V电压,12 V电压信号驱动霍尔电流传感器工作,霍尔电流传感器将此时的工作电压信号转变为工作电流信号,通过霍尔电流传感器的M脚输出,并通过一个200 Ω的电阻,主控芯片的AD采样引脚采样此时电阻上的电压,将该电压与5 V电压的比值乘以外部输入的24 V电压值,即为此时整个机器人工作时的工作电压,该比值即为机器人工作电量的百分比值。

图5 信号采集电路
3.2 机器人无线通信系统
由于所设计的线路巡检机器人工作在高压线路,同时又是带电工作,故这里采用无线通信技术来实现工作人员对机器人控制指令的发送。这里采用的无线通信芯片为深圳市科易连通讯设备有限公司所设计开发的KYL-1020L。
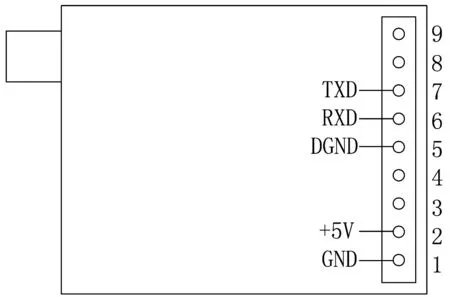
图6 KYL-1020L接线方式
图6所示为该无线模块与机器人伺服驱动板以及控制电路板的连接方式,该模块连接方式简单,只需将7脚连接至控制芯片的TXD引脚,将6脚连接至控制芯片的RXD引脚,5脚连接至控制芯片的DGND,再由外部电源给该模块供电,即可实现控制板与驱动板的无线通信。
3.3 信号采集显示模块
为了精确显示机器人在工作过程中的工作状态,伺服系统中加入了高精密电阻进行信号采样。与之相对应,控制系统中就需要多位数码管显示其采样值,这里采用数码管驱动芯片HD7279A+多位数码管来完成相应的显示要求,模块框图如图7所示。

图7 数码管显示模块
4 机器人视频系统
为了实现该控制系统对于高压线路上障碍物的准确定位,除了可靠的硬件电路,精确的控制算法外,利用视屏系统对于高压线路上情况的实时监测也十分重要。图8所示为该控制系统的视频系统。

图8 视频系统
摄像头所拍摄到的画面,经过电视信号放大器进行信号放大之后,再由电视信号放大器的无线信号传输模块发送给位于地面控制箱中的视频处理模块;视频信息经处理之后由显示屏显示,供操作人员实时了解机器人工作情况。
5 机器人抗电磁干扰
由于线路巡检机器人运行在高压线路,高压输电线路运行过程中在其线路附近形成很强的工频电磁场,为了能使机器人正常工作,必须考虑电磁场的影响。机器人对于电磁场的屏蔽包括对静电场的屏蔽和对电磁场的屏蔽。电场的屏蔽主要根据法拉第笼的原理,在机器人外壳形成法拉第笼,机器人内部为等电势体,在这里采用屏蔽效果和强度都比较好的铝作为机器人外壳的材料[7]。
6 电路板及超声波电机驱动波形
如图9所示是根据上述原理所设计出的机器人伺服驱动电路板。

图9 线路巡检机器人伺服驱动板
如图10所示是根据上述原理所设计出的机器人控制系统电路板。
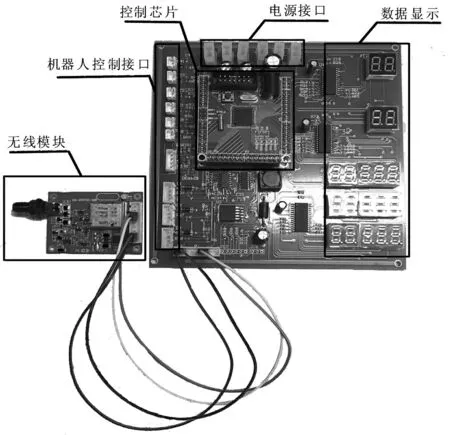
图10 线路巡检机器人控制系统电路板

图11 IR2103输入端4路PWM信号
如图11所示为超声波电机驱动控制波形,其中CH1、CH2为A相控制信号,CH3、CH4为B相控制信号,两相对应信号相位差各相差90°。
7 结束语
本文介绍了一
种线路巡检机器人伺服控制系统,较详细的阐述了该控制系统的工作原理,该伺服控制系统有如下特点:
(1)采用较为可靠无线通信技术,减少了高压线路巡检的工作量,提高高压线路巡检的可靠性与安全性;
(2)可上下移动的机械臂系统利用蜗杆传动的方式将电机的旋转运动转变为机械臂的直线运动,提高了整个机器人的灵活性;
(3)可靠的电磁屏蔽设计,保证了机器人在高压线路上工作时能够可靠工作;
(4)体积小,机械结构安装方便;
[1] 郑拓,吴功平,严宇,等. 高压线巡检机器人巡检与通讯系统设计与实现[J]. 武汉大学学报(工学版),2012,56(2):235-240.
[2] 岳湘,王洪光,姜勇,等.一种110 kV输电线路巡检机器人机构研究[J].智能系统学报,2016,11(2):155-162.
[3] 胡敏强,金龙,顾菊平. 超声波电机原理与应用[M]. 北京:科学出版社, 2005.
[4] LIN F J, WAI R J, HONG C M.Recurrent neural network control for LCC-resonant ultrasonic motor drive[J]. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, 2008, 47 (3).737-49.
[5] 姜楠, 林云生, 刘俊标, 等. 基于DDS的超声电机驱动电源的研究[J]. 电子器件, 2007, 30(1):109-112.
[6] 翟晓军, 胡敏强, 曹胜华,等. 基于单片机的超声波电机驱动控制系统[J]. 微电机, 2004, 6(9):31-33.
[7] 何缘,吴功平,王伟,等.高压输电线路智能巡检机器人的研制与应用[J].武汉大学学报(工学版),2016,60(3):446-451,464.
A Servo Control System for Line Inspection Robots Based on USM
Li Xuan, Xu Zhike, Zhou Ling, Jin Long, Dai Desong, Pan Zhixiang, Gong Longzhong
(College of Electrical Engineering, Southeast University, Nanjing Jiangsu 210096, China)
10.3969/j.issn.1000-3886.2017.03.004
TM451
A
1000-3886(2017)03-0009-03
定稿日期: 2016-10-17
李轩(1992-),男,江苏南通人,硕士生,专业:电机控制。
猜你喜欢
环球时报(2022-09-29)2022-09-29
躬耕(2020年2期)2020-03-16
电子制作(2018年17期)2018-09-28
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
水利科技与经济(2016年4期)2016-04-22
湖北工业大学学报(2016年5期)2016-02-27
火控雷达技术(2016年2期)2016-02-06
河南科技(2014年10期)2014-02-27
