
一种并/混联汽车电泳涂装输送机构运动/力传递效率性能分析
2017-09-29 09:53朱明星高国琴陈太平
中国机械工程 2017年18期
朱明星 高国琴 吴 军 陈太平
1.江苏大学电气信息工程学院,镇江,2120132.江苏科技大学公共教育学院,镇江,212003 3.清华大学机械系,北京,100084
一种并/混联汽车电泳涂装输送机构运动/力传递效率性能分析
朱明星1,2高国琴1吴 军3陈太平1
1.江苏大学电气信息工程学院,镇江,2120132.江苏科技大学公共教育学院,镇江,212003 3.清华大学机械系,北京,100084
针对一种新型汽车电泳涂装输送机构,提出一种表征并/混联式输送机构输入输出端之间的运动/力传递效率的分析评价方法。首先采用旋量形式导出输送机构的运动学和动力学,再根据旋量的Klein型即李代数e(3)的双线性形式,建立了以输送机构末端执行器的瞬时运动功率与输入端瞬时运动功率的比值作为表征机构输入输出的运动/力瞬时传递效率的瞬态分析评价指标。基于所提出的分析评价方法,得出机构在三种典型期望运动轨迹下从输入端到输出端的运动/力瞬时传递效率随时间变化的曲线,并求得其运动/力平均传递效率。最后利用MATLAB软件对机构进行实例仿真,仿真结果表明了评价指标的合理性和有效性。
性能指标;旋量理论;输送机构;运动/力传递效率
0 引言
随着汽车制造业的迅速发展, 汽车涂装已由作坊式涂装发展到涉及机械、电气、化工、环保等诸多科技领域的现代工业涂装。汽车连续生产时所采用的车身涂装输送系统主要有传统悬挂式输送系统、双轨摆杆式输送链系统、多功能穿梭机和全旋反向浸渍(RoDip)输送系统等。为克服现有输送系统采用悬臂梁结构的缺陷,并满足汽车涂装生产线对输送机柔性化、环保化和自动化水平的更高需求,本课题组研发了一种新型并/混联式汽车电泳涂装输送机构[1]。该机构由行走机构和升降翻转机构构成,行走机构驱动车身实现进退运动,升降和翻滚机构实现车身的升降翻滚运动,通过以上三种运动的复合运动,可使车身在电泳槽中充分搅动,从而消除汽车白车身在电泳过程中易出现车顶气包的问题,同时该输送机构基于并/混联机构设计并采用对称的两组升降翻滚机构,可增强输送设备承载能力,能适应于不同车型和大小车身的输送,提高了输送系统的柔性。
机构性能指标是其性能分析与尺度优化之间的联系点,既可以用来分析已有机构的性能,又可以对新机构的尺度优化进行指导。如何设立实用有效的性能指标来量化机构的性能,一直是机构学研究领域的一个热点问题。
对于并/混联式输送机构,其核心作用是在输入端(主动驱动关节)和输出端(末端执行器)之间传递运动和力,即机构可以将输入端的广义运动传递到输出端以完成末端执行器所要求的动作。因此,输送机构的性能指标应该要能反映机构传递运动和力的能力[2]。对于并联机构,传递指标的概念首先由DENAVIT等[3]以Jacobian矩阵行列式值给出,随后WATANABE等[4]通过量纲一的Jacobian行列式值,在忽略机构内部力作用下将其应用延伸至不同机构的传递性能比较。TAKCDA等[5]通过Jacobian矩阵得到动平台速度和与动平台固连的分支连杆之间的夹角的关系,在单自由度并联机构中引用压力角余弦最小值的概念提出传递指标。ALT[6]最早提出传递角的概念,HAIN[7]、SHRIRNIVAS等[8]将其方法进行改进,但只考虑了机构的输出性能。针对由Jacobian矩阵和传递角所构建的指标存在的问题,国内外学者研究了能够同时体现运动和力的传递能力的指标,用以分析并联机构的运动/力传递特性。根据MISES[9]提出的基于旋量理论的互易积,从物理学角度考虑,当进行互易积运算的两个旋量中有一个旋量表示运动旋量,另一个旋量表示力旋量时,描述的是该力旋量在运动旋量方向上的瞬时传递功率。基于此,YUAN等[10]定义了传递因子。SUTHERLAND等[11]定义了传递指标,TSAI等[12]又提出了广义传递力旋量的概念。CHEN等[13]采用能效系数法分析和定义了相关评价指标,用以探讨并联机构的传递效率;WANG等[14]给出了并联机构中单个分支运动链OTS的算法,解决了运动/力传递性能指标应用于并联机构的关键问题;陈祥等[15]根据并联机构中可能存在的不同形式的运动旋量和力旋量的组合,给出每种组合情况的传递功率最大值的计算模型,该研究很好地解决了并联机构中单个运动支链运动/力传递效率的评价问题,但其问题的求解较为复杂。
本文考虑到项目所研究的并/混联机构为输送用机构,与仅反映并联机构中任一支链或动平台的运动/力传递特性的能效系数相比,对从机构输入端到输出端的运动/力传递特性的表征更为重要,为此,研究提出以输送机构末端执行器的瞬时运动功率与输入端瞬时运动功率的比值,来表征机构从输入端到输出端的运动/力瞬时传递效率的分析评价方法,以不仅能反映机构的运动/力传递特性,而且可避免运动/力传递功率最大值的求解。为反映机构在整个运动过程的运动/力传递特性,进一步研究提出机构从输入端到输出端的运动/力平均传递效率的分析评价指标,以表征机构在整个运动过程的运动/力传递效率。
1 旋量理论基础
旋量可用由一对三维向量构成的双线性向量形式表示,写为
(1)
其中,s为旋量轴线的单位方向向量,r为轴线上任意一点位置向量,h为旋距,是旋量副部在主部上的投影;l、m、n为旋量轴线的单位方向向量的三个方向余弦,p、q、r由r×s+hs确定;旋量的轴线向量s=(sx,sy,sz)T为主部,也称原部,用于确定轴线位置与旋距的向量s0=(sx0,sy0,sz0)T为副部,也称对偶部。速度旋量可写为

(2)
式中,ω为瞬时轴线的角速度;v为线速度。
用VP∈R6表示串联机构运动末端相对惯性坐标系的瞬时速度旋量,则VP为串联机构各关节速度与相应运动副旋量在当前位形下的线性组合,即螺旋运动方程为
(3)

作用在旋量轴线上的力旋量可表示为
(4)式中,f为沿轴线方向上的纯力;m为作用于某点的力偶。
旋量中原部矢量s与原点位置无关,但偶部矢量s0与原点位置有关。将旋量$的原点由点O移动到点A,旋量变为$A,且
(5)
两旋量分别为$1和$2,则两旋量的互易积可由Klein型表示,可定义为
$1∘$2=s1·s20+s2·s10=(h1+h2)cosφ-dsinφ
式中,d和φ分别为两旋量轴线的距离和投影夹角。
2 输送机构的运动学分析
采用旋量理论描述机构运动学问题,并进行运动学分析,既可以简化运动学分析时坐标系转换的繁琐,又可将刚体运动的几何意义描述得很清楚,从而简化对机构的分析。本文用旋量六维向量形式导出输送机构的运动学表达式。
2.1机构描述与坐标系设置
本文所研究的新型并/混联式输送机构的机构原型及机构结构分别如图 1和图 2 所示。该机构为左右对称结构,机构一边的组成详见图2。
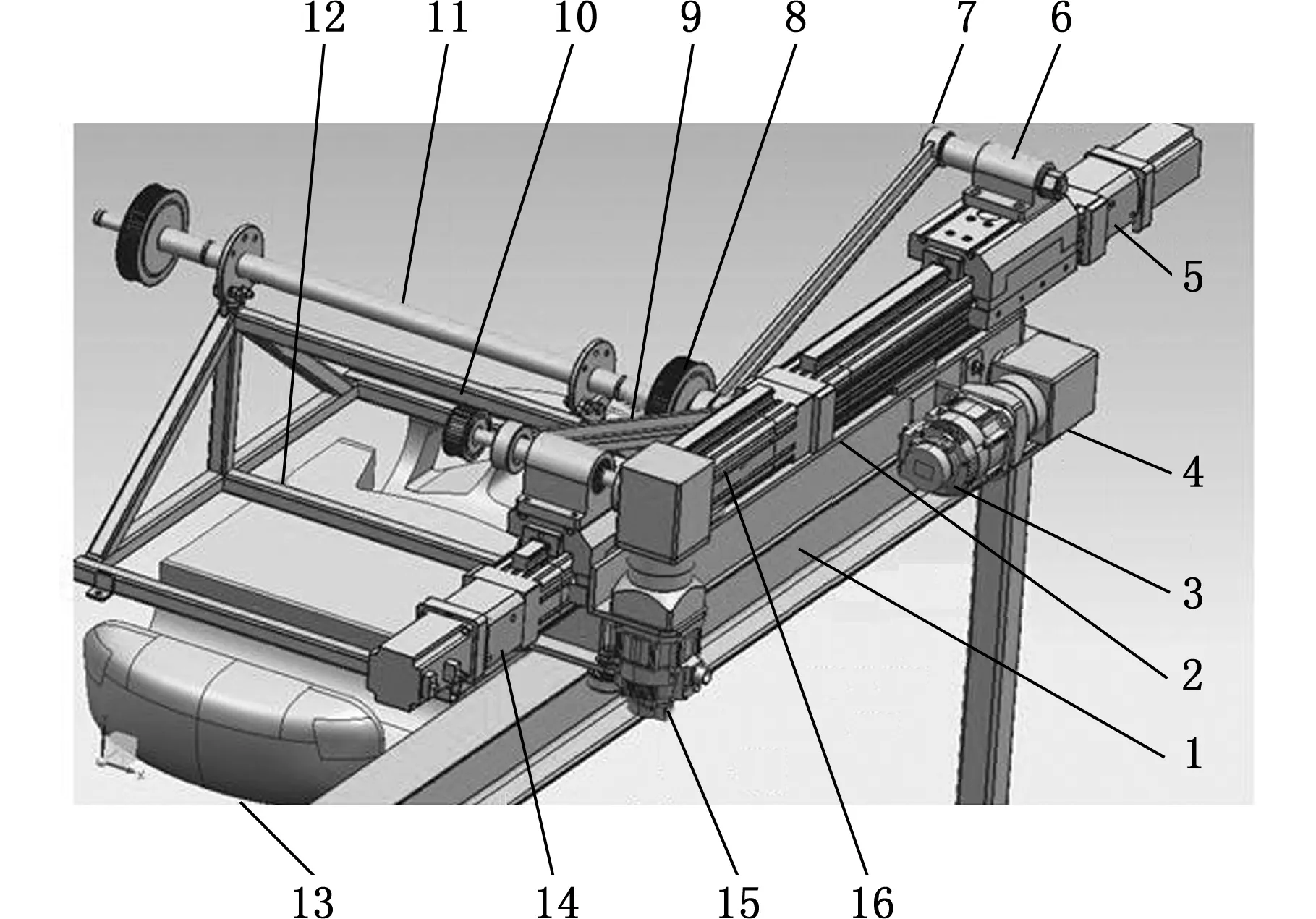
1.导轨 2.底座 3.行走驱动电机 4.行走驱动电机底座 5.升降驱动电机 6.移动滑块 7.第一转动副 8.从动轮 9.连杆 10.主动轮 11.中间连杆 12.车体固定架 13.车体 14.升降驱动电机 15.翻转驱动电机 16.丝杠图1 机构结构示意图Fig.1 The structure of the mechanism

图2 升降翻转机构结构简图Fig.2 The structure of the lifting and turning mechanism
行走机构由行走轮、底座、导轨三部分组成,通过行走轮在导轨上的运动实现输送机构的行走运输功能。升降翻转机构以行走机构为机架,由两组相同的升降翻转机构组成。这两组机构通过连接杆和车体固定架相连。此机构拥有六条支链,其中第一、第二、第三、第四支链为PRR运动链,滑块通过驱动电机形成丝杆的移动来实现车体的上升或下降运动,第五、第六支链机构为RR运动链,主动轮由翻转电机驱动,通过传动带,带动从动轮转动,以实现车体的翻转功能。
为便于分析,建立图2所示的升降翻转机构结构简图,以A1和A2的中点O′ 为原点建立基础坐标系{B}={O′X′Y′Z′}。Ai(i=1,2,3,4)分别为丝杠的前端点;Bi(i=1,2,3,4)分别为滑块的中心点;Ci(i=1,2,3,4)分别为滑块与连杆的铰链中心点;Di(i=1,2,3,4)分别为连杆与连接杆的铰链中心点;Pj(j=1,2)分别为连接杆的两端点;P为P1P2的中点。该机构可实现在O′X′Z′ 平面内的移动和绕Y′ 轴的转动,即具有三个自由度,q1=(x,z,β)T为升降翻转机构系统的广义坐标。
在基础坐标系中,Ai(i=1,2,3,4)的坐标向量分别为

式中,L1、L2分别为A1到A2、A3到A4的距离,且L1=L2;b为连接杆P1P2的长度。
为了简化分析,忽略各运动副的尺寸,则有
用zi(i=1,2,3,4) 表示Ai到Bi的距离,结合机构连杆长度不变的特性,可得升降翻转机构第一、第二、第三、第四支链的位置方程分别为
其中,li(i=1,2,3,4)分别表示第一、第二、第三、第四支链中连杆的长度,且l1=l2=l3=l4。进一步可得升降翻转机构第一、第二、第三、第四支链的位置逆解:

结合以上分析,并忽略各运动副的几何尺寸,在基础坐标系中点Bi、Ci(i=1,2,3,4)的坐标向量分别为
升降翻转机构中,第一、第二、第三、第四支链依次连接一个移动副和两个转动副。以第一支链为例,各运动副轴线单位方向矢量分别为
则根据式(2)得出第一支链各运动副的运动旋量为
2.2速度与加速度分析
升降翻转机构第一、第二、第三、第四支链的运动末端为连接杆,用VP表示连接杆的瞬时速度旋量,即
(6)
GP=[GP1GP2]T
式中,GP为系统广义坐标到旋量坐标的转换矩阵。
升降翻转机构第一、第二、第三、第四支链中的每一支链可以看成是由三个单自由度运动副组成的开环运动链。以第一支链为例,根据式(3),连接杆的瞬时速度旋量VP还可以表示为
(7)
为了获得式(7)中各运动关节的速度,假设旋量$0与对应支链中被动运动副旋量的互易积为0,而与对应支链中主动运动副旋量的互易积为1,即
(8)
通过求解线性方程式(8),可以获得旋量
(9)
将式(7)两边分别与旋量$0进行互易积,整理后得出各支链主动副的速度
(10)

对于第五、第六支链的转动副,其轴线单位方向矢量为
为了简化分析,忽略第五、第六支链中主动轮的厚度,即第五、第六支链中主动轮的中心点分别等效为C1、C2,则第五、第六运动副的运动旋量分别为
(11)
根据式(10)、式(11),可知升降翻转机构的速度雅可比矩阵为
其中,下标j表示支链的第j关节,Hi1为海赛矩阵,且有
为了简化计算,忽略机构各运动副几何尺寸的影响,并假设机构各构件均匀分布。将该升降翻转机构的运动部件分为连接杆组件和支链组件,其中连接杆组件包括连接杆及与之固定连接的固定支架,并令连接杆的中心点P为该组件的参考点。由于机构要求连接杆的中心轴线始终与基础坐标系Y轴方向平行,所以连接杆组件以质心为参考点的瞬时速度旋量VPC、瞬时加速度旋量APC分别为


根据第一、第二、第三、第四支链中各构件的运动形式,将第一、第二、第三、第四支链组件分解为滑块、丝杠和连杆,并令Bi(i=1,2,3,4)为滑块和丝杠的参考点,Ci(i=1,2,3,4)为连杆的参考点。忽略滑块的几何尺寸,将点Bi(i=1,2,3,4)等效为各支链中滑块的质心,则升降翻转机构第一、第二、第三、第四支链组件中滑块以Bi(i=1,2,3,4)为参考点的瞬时速度旋量VSi、瞬时加速度旋量ASi分别为
由于丝杠仅绕自身轴线转动,所以升降翻转机构第一、第二、第三、第四支链组件中丝杠以质心为参考点的瞬时速度旋量VDi、瞬时加速度旋量ADi分别为

根据式(5)旋量的变换公式,连杆以质心为参考点的瞬时速度旋量VLCi、瞬时加速度旋量ALCi分别为
i=1,2,3,4
i=1,2,3,4

对于升降翻转机构第五、第六支链,为了简化问题的分析,将传动带分成两部分,一部分折算到主动轮,一部分折算到从动轮,同时由于从动轮与连接杆固定连接,故从动轮的瞬时速度旋量、瞬时加速度旋量与连接杆组件相同。而主动轮以主动轮质心为参考点的瞬时速度旋量VWi、瞬时加速度旋量AWi分别为
(12)
(13)
3 输送机构动力学分析
设一刚体质量为m,根据达朗贝尔原理,该刚体以质心O为参考点的惯性力旋量可表示为

根据式(12),可得连接杆组件关于组件质心的外力旋量
式中,mP为连接杆组件的质量;g为重力系数向量,g=[0 0g]T;IP为连接杆组件在惯性坐标系下关于点P的惯性矩阵。
分析升降翻转机构的结构可知,由于第一支链(第三支链)中的滑块与第五支链(第六支链)中的主动轮和翻转驱动电机相连,滑块移动时带动主动轮和翻转驱动电机一起移动,故将第五支链(第六支链)中的主动轮和翻转驱动电机的质量折算入第一支链(第三支链)中的滑块。又由于滑块只沿丝杆轴线方向移动,所以表征第一、第二、第三、第四支链中滑块以滑块质心为参考点的外力旋量为
式中,mSi为滑块的质量。
由于第一、第二、第三、第四支链中丝杠仅绕自身轴线转动,因此仅有绕自身轴线转动的惯性力矩,而无重力矩。则表征第一、第二、第三、第四支链中丝杠绕自身轴线转动的外力旋量为
式中,mDi为丝杠的质量;IDi为丝杠的转动惯量。
同理,对于升降翻转机构第一、第二、第三、第四支链组件中连杆,表征其以质心为参考点的外力旋量为
i=1,2,3,4
式中,mLi为连杆的质量;ILi为连杆在惯性坐标系下关于点Ci的惯性矩阵。
对于第五、第六支链,为了简化问题的分析,将传动带分成两部分,一部分折算到主动轮,一部分折算到从动轮,同时由于两个从动轮通过连接杆固定连接,可将其视为一体。则表征第五、第六支链中主动轮以主动轮质心为参考点的外力旋量为
式中,mWi为主动轮的质量;IWi为主动轮的转动惯量。
考虑作用在升降翻转机构上的外力、驱动力,由虚功原理得出升降翻转机构的动力学方程

(14)
式中,τ1为升降翻转机构的广义等效力。

4 运动/力传递效率指标
考虑到所研究并/混联机构为输送用机构,对从机构输入端到输出端的运动/力传递特性的表征显得更为重要,本文根据旋量的Klein型,即李代数e(3)的双线性形式,提出用输送机构末端执行器(中间连接杆)的瞬时运动功率与输入端瞬时运动功率的比值来表征该机构的瞬时运动/力传递效率的指标,即
同时,考虑到瞬时运动/力传递效率不能总体反映机构在运动周期内传递运动和力的能力,为反映机构在整个运动过程的运动/力传递特性,进一步研究提出机构从输入端到输出端的运动/力平均传递效率的分析评价指标,以表征机构在整个运动过程中的运动/力传递效率。所提出的平均传递效率为
式中,T为运动周期。
5 仿真实例分析
为了研究新型输送机构的性能并验证所提出性能指标的合理有效性,基于上述输送机构运动学分析、动力学分析和所定义的指标,采用MATLAB进行仿真分析。
5.1机构的结构参数
机构的各构件物理参数如表1所示。
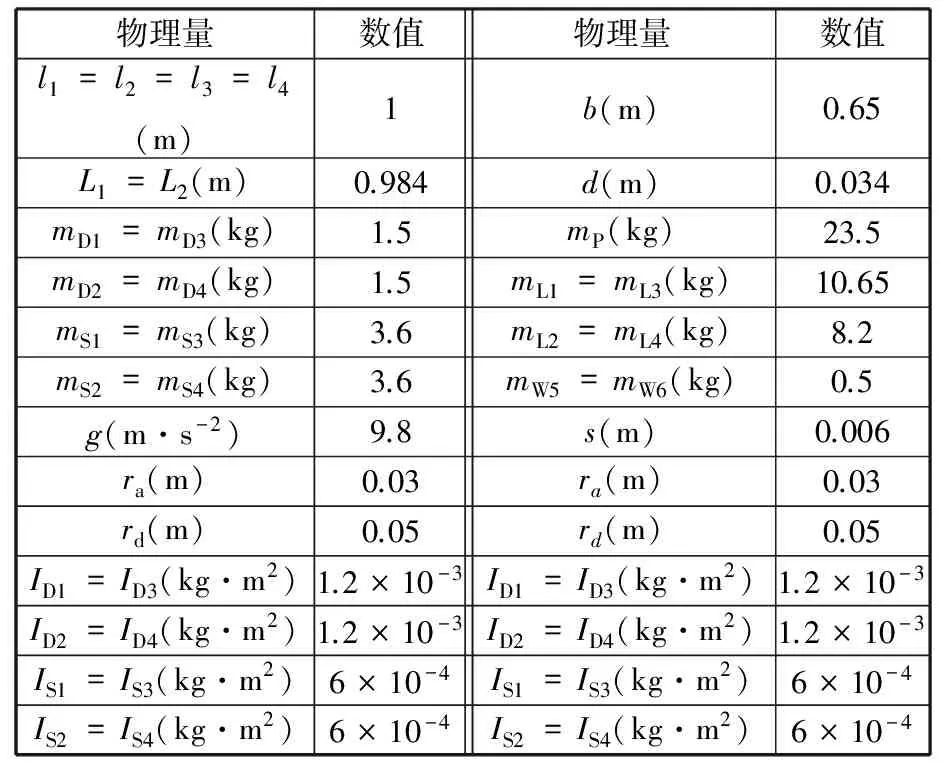
表1 汽车电泳涂装输送机构构件参数
将机构的各构件等效为规则的形状,则其惯性矩阵分别为

5.2MATLAB数值仿真
根据新型汽车电泳涂装输送机构的工艺要求,规划升降翻转机构中间连接杆中心点P的三种期望运动轨迹,如图3所示,其运动描述方程分别为

(a)Z方向移动量
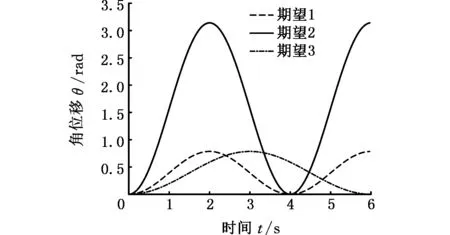
(b)绕Y轴逆时针转动角度图3 输送机构中连接杆中心点P的期望运动轨迹曲线Fig.3 The structure of the lifting and turning mechanism

(15)

(16)
(17)
其中,式(15)为期望运动轨迹1,当t=0时,中间连接杆中心点P处于初始位置q=(0,0.11,0)T,且一个运动周期为4 s;式(16)为期望运动轨迹2,当t=0时,中间连接杆中心点P处于初始位置q=(0,0.03,0)T,且一个运动周期为4 s;式(17)为期望运动轨迹3,当t=0时,中间连接杆中心点P处于初始位置q=(0,0.11,0)T,且一个运动周期为6 s。
利用MATLAB软件,对所建立机构运动学、动力学进行数值仿真,得出在三种期望运动轨迹下机构各支链主动关节的驱动速度、驱动加速度、驱动力/力矩随时间变化曲线分别如图4、图5、图6所示。
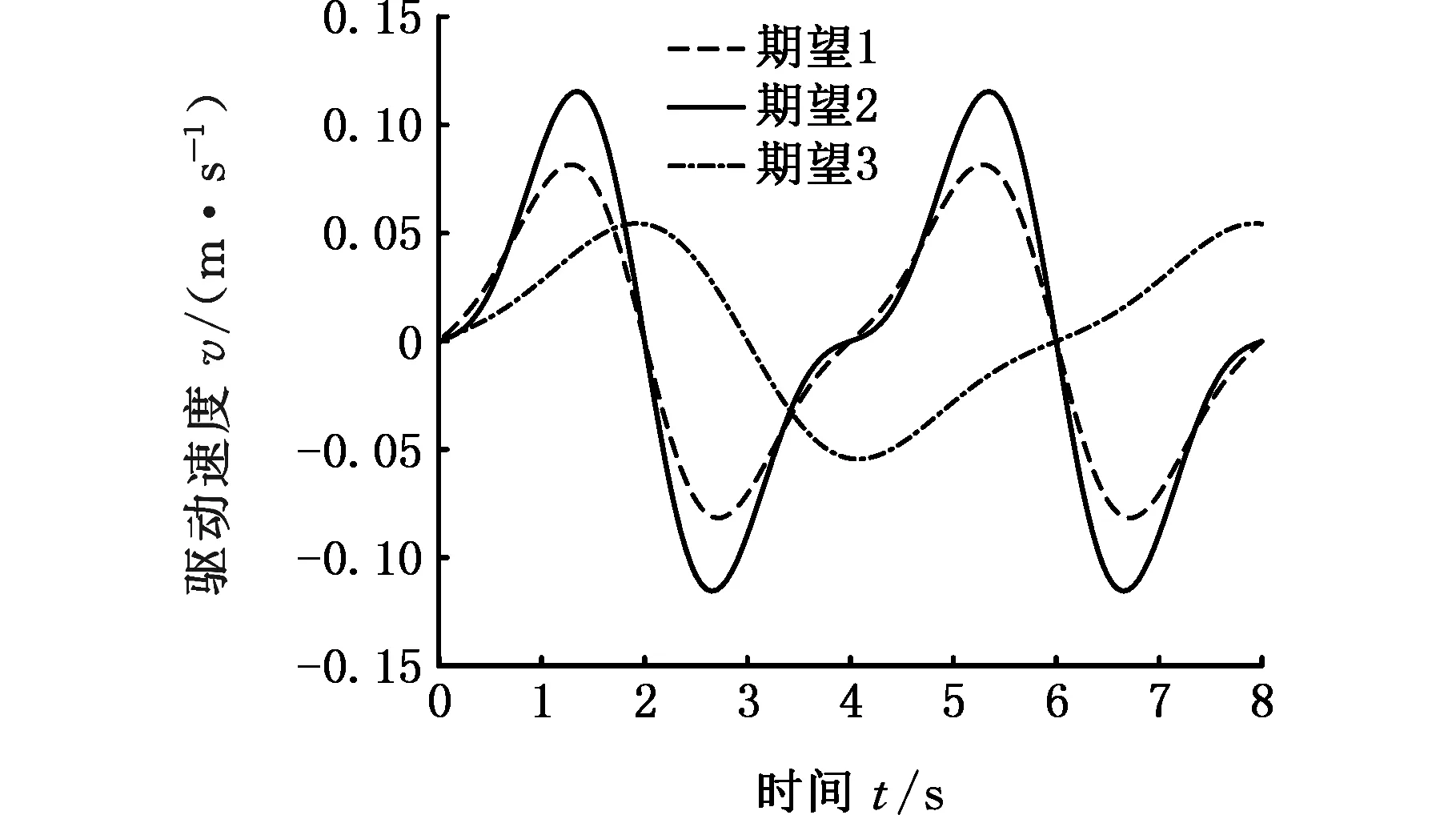
(a)主动关节1~4
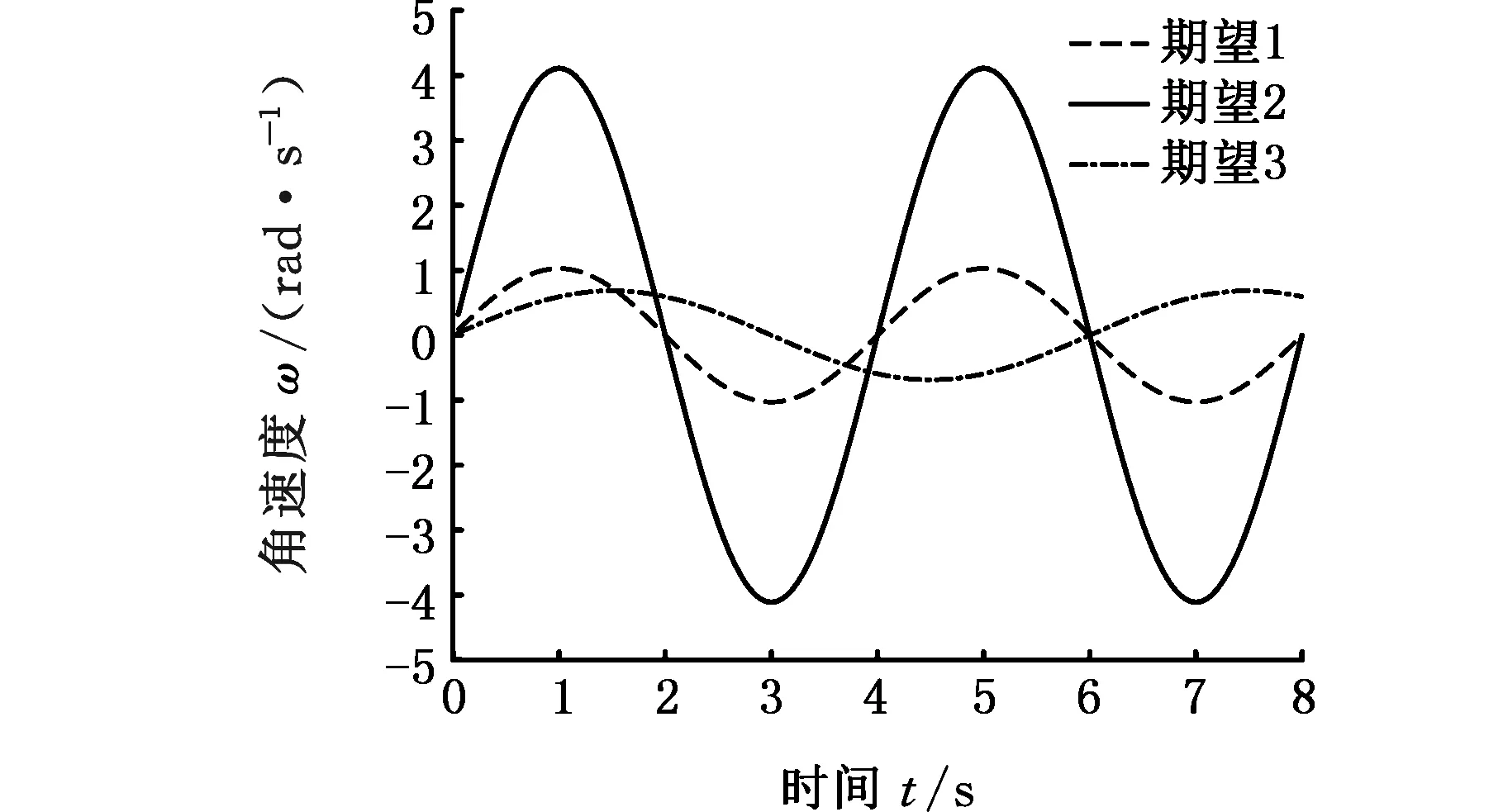
(b)主动轮1、主动轮2图4 各支链主动关节的驱动速度变化曲线Fig.4 The velocity curves of active joints of each chain
综合图4~图6可以看出,在3种期望运动轨迹下机构在运动时各支链主动关节的驱动速度、驱动加速度、驱动力/力矩变化连续平滑,不存在明显冲击,没有奇异和突变,表明该机构性能良好。
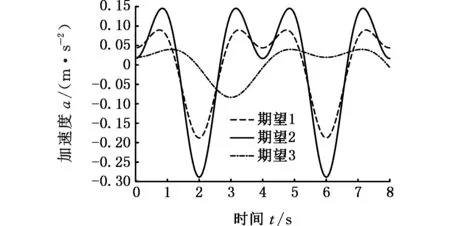
(a)主动关节1~4
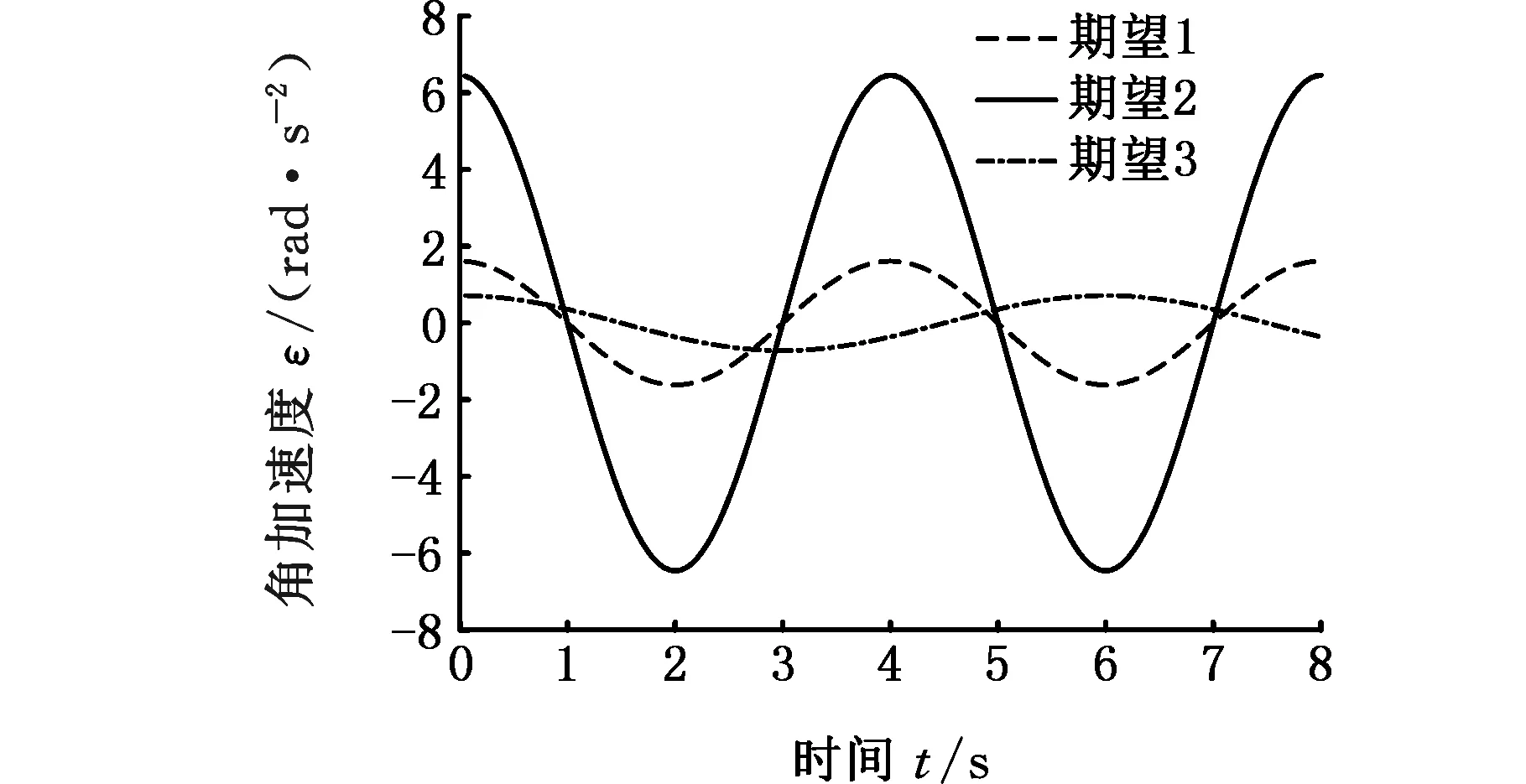
(b)主动轮1、主动轮2图5 各支链主动关节的驱动加速度变化曲线Fig.5 The Acceleration curves of active joints of each chain
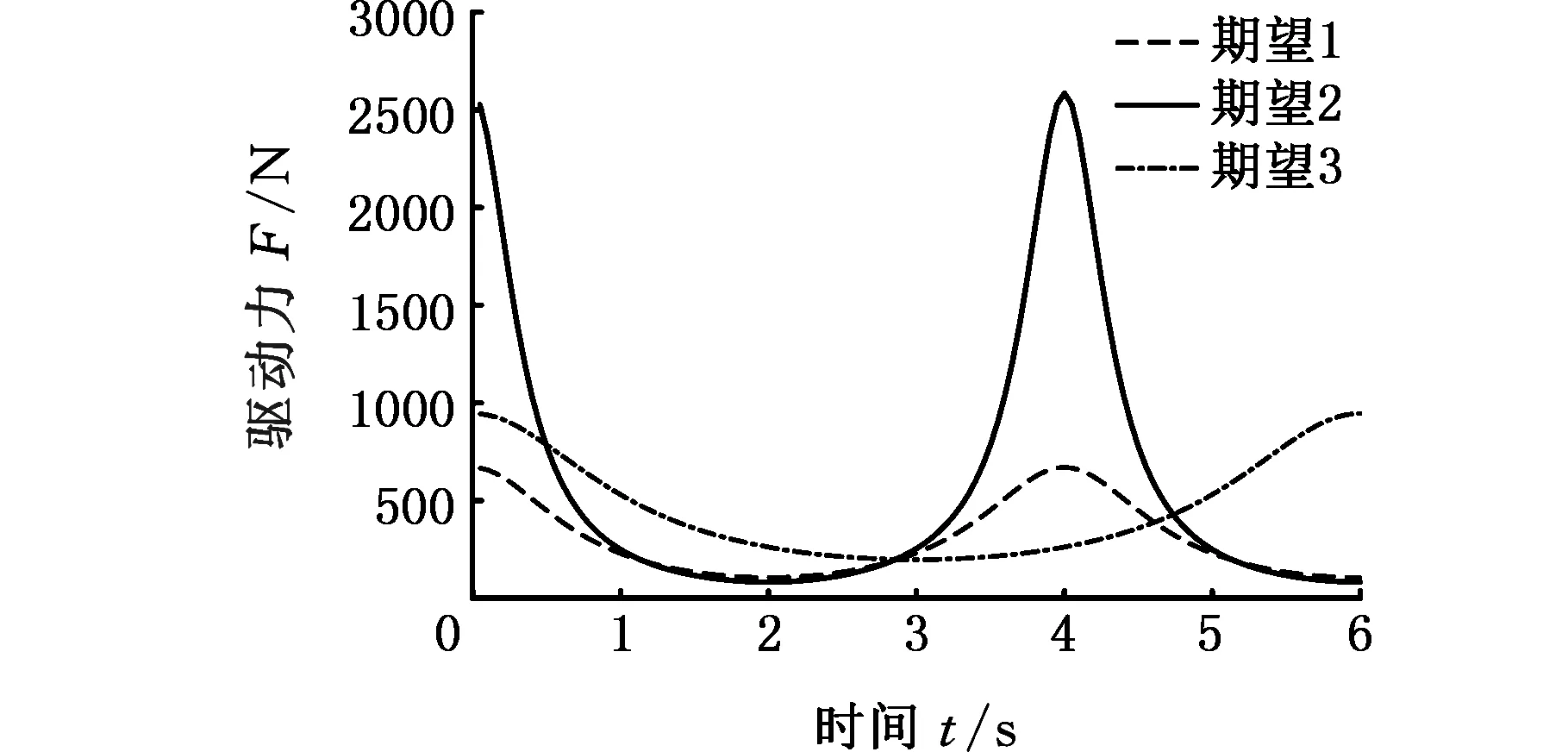
(a)主动关节1~4
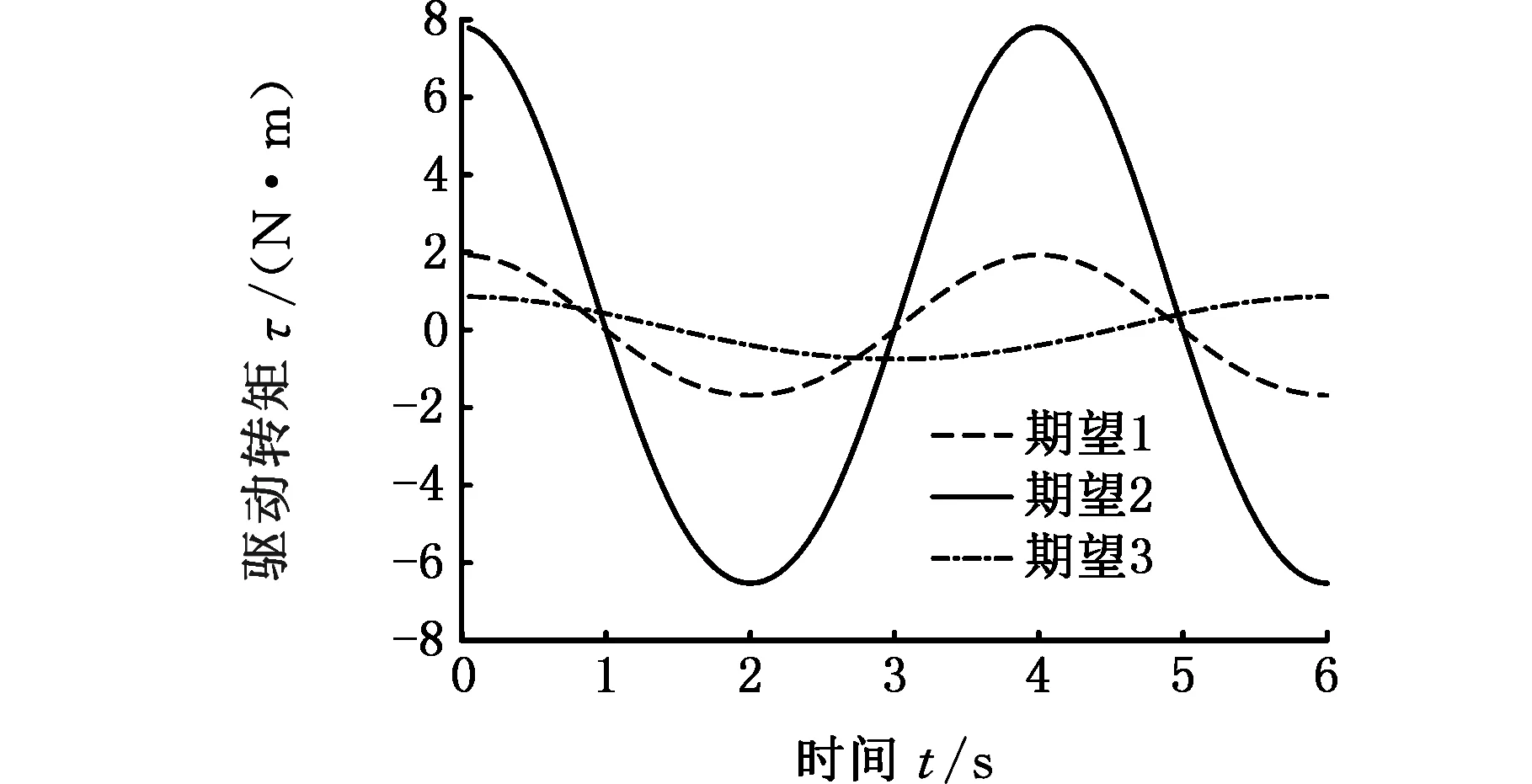
(b)主动轮1、主动轮2图6 各支链主动关节的驱动力/力矩变化曲线Fig.6 The driving force or torque curves of active joints of each chain
在此基础上,对输送机构的运动/力传递效率进行分析,得出在实现3种期望运动轨迹时输送机构从机构输入端到输出端的瞬时运动/力传递效率变化曲线如图7所示。
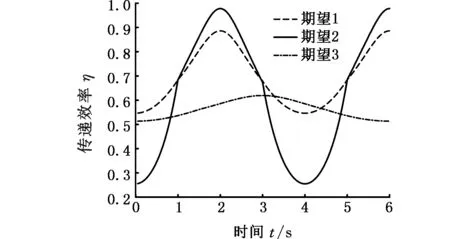
图7 输送机构瞬时运动/力传递效率变化曲线Fig.7 The motion/force transmission efficiency curve of transport mechanism
分析图7可知,在三种期望运动轨迹情况下,当输送机构各主动关节的速度较小、加速度逐渐增大时,机构瞬时运动/力传递效率较低,这是由于此时机构需要克服各构件的惯性力作用。而当各主动关节的速度最大、加速度为0时,机构瞬时运动/力传递效率最高。同时,为了比较三种期望运动轨迹情况下输送机构的运动/力传递效率,计算输送机构在一个运动周期T内的平均传递效率,如表2所示。

表2 3种期望运动轨迹情况下输送机构的平均传递效率
由表2可知,在不同的期望运动轨迹下,机构的平均传递效率不同。在期望运动轨迹1情况下,机构在一个运动周期T内的平均传递效率较高,而在期望运动轨迹3情况下,机构在一个运动周期T内的平均传递效率较低。这是由于在三种期望运动轨迹情况下,当各主动关节的平均速度和平均加速度较小时,此时得到的机构的平均传递效率就较低,而当各主动关节的平均速度和平均加速度越大,此时机构的平均传递效率就越高。仿真及分析结果表明,所提出的指标是合理有效的。
6 结论
(1)基于旋量理论,针对输送机构的结构特点,推导出了机构各主动关节、连接杆组件的速度、加速度,以及力和力矩。
(2)针对并/混联输送机构,研究提出一种运动/力传递效率的性能指标,即以输送机构末端执行器的瞬时运动功率与输入端瞬时运动功率的比值来表征机构从输入端到输出端的运动/力瞬时传递效率。
(3)为反映机构在整个运动过程传递运动和力的能力,进一步提出机构从输入端到输出端的运动/力平均传递效率的分析评价指标,以表征机构在整个运动过程中的运动/力传递效率。
(4)以三种典型期望运动轨迹为例,利用MATLAB软件进行了运动学、动力学的仿真,得出了升降翻转机构各主动关节的速度、加速度、驱动力的变化曲线,并且比较了三种期望运动轨迹情况下输送机构的的运动/力传递效率,由分析可知,在期望运动轨迹1情况下,机构在一个运动周期T内的平均传递效率最高,通过与理论分析结果比较,其一致性表明了所建立指标的合理有效性。
[1] 高国琴,范杜娟,方志明. 汽车电泳涂装输送用新型混联机构的动力学控制[J].中国机械工程,2016,27(8):1012-1017. GAO Guoqin, FAN Dujuan, FANG Zhiming. Dynamics Control of a Novel Hybrid Mechanism for Automobile Electrocoating Conveying[J]. China Mechanical Engineering,2016,27(8):1012-1017.
[2] ANGELES J. Fundamentals of Robotic Mechanical System:Theory,Methods and Algorithms[M]. 3nd ed. Berlin:Springer,2004.
[3] DENAVIT J,HARTENBE R S,RAZI R,et al. Velocity,Acceleration,and Static Force Analyses of Spatial Linkages[J]. Transactions of the ASME,1965,87(11):903-910.
[4] WATANABE K,FUNABASHI H. Kinematic Analysis of Stephenson 6-link Mechanisms—2. Index of Motion-transmission Characteristics[J]. Bulletin of the JSME—Japan Society of Mechanical Engineers,1984,27:2871-2878.
[5] TAKEDA Y, FUNABASHI H, ICHIMARU H. Development of Spatial in-Parallel Actuated Manipulators with Six Degrees of Freedom with High Motion Transmissibility[J]. JSME International Journal, Series C,1997,40 (2):299-308.
[6] ALT V H. Der Ubertragungswinkel and Seine Bedeutung fur dar Konstruieren Periodischer Getriebe[J]. Werksstattstechnik,1932,26(4): 61-64.
[7] HAIN K. Applied Kinematics[M]. New York: McGraw-Hill, 1967.
[8] SHRIRNIVAS S B, SATISH C. Transmission Angle in Mechanisms[J]. Mechanism and Machine Theory, 2002, 37(2): 175-195.
[9] Von MISES R. Motorrechnung: Ein Neues Hilfsmittel in der Mechanic Zeitschrift fur Ange-wandte Mathematik and Mechanik,1924,4(2): 155-181.
[10] YUAN M S C,FREUDENSTEIN F,WOO LS. Kinematics Analysis of Spatial Mechanism Bymeans of Screw Coordinates. Part 2—Analysis of Spatial Mechanisms[J]. Journal of Manufacturing Science and Engineering, 1971,93(1):67-73.
[11] SUTHERLAND G,ROTH B. A Transmission Index for Spatial Mechanisms[J]. Journal of Engineering for Industry,1973,95(2):589-597.
[12] TSAI M J, LEE H W. Generalized Evaluation for the Transmission Performance of Mechanisms[J]. Mechanism and Machine Theory, 1994,29(4):607-618.
[13] CHEN C, ANGELES J. Generalized Transmission Index and Transmission Quality for Spatial Linkages[J]. Mechanism and Machine Theory,2007,42(9):1225-1237.
[14] WANG Jingsong, WU Chao, LIU Xinjun. Performance Evaluation of Parallel Manipulators: Motion/Force Transmissibility and Its Index[J].Mechanism and Machine Theory,2010,45(10): 1462-1476.
[15] 陈祥,谢福贵,刘辛军. 并联机构中运动/力传递功率最大值的评价[J].机械工程学报,2014,50(3):1-9. CHEN Xiang, XIE Fugui, LIU Xinjun. Evaluation of the Maximum Value of Motion/Force Transmission Power in Parallel Manipulators[J]. Journol of Mechanical Engineering,2014,50(3):1-9.
(编辑郭伟)
AnalysisofMotion/ForceTransmissionEfficiencyPerformanceforaParallel/HybridElectro-coatingConveyingMechanismofAutomobileBodies
ZHU Mingxing1,2GAO Guoqin1WU Jun3CHEN Taiping1
1.School of Electrical and Information Engineering,Jiangsu University,Zhenjiang,Jiangsu,212013 2.School of Humanities and Sciences,Jiangsu University of Science and Technology,Zhenjiang,Jiangsu,212003 3.Department of Mechanical Engineering, Tsinghua University,Beijing,100084
For motion/force transmission efficiency from the inputs to the outputs of a novel mechanism for automobile electro-coating conveying, an analysis and evaluation method was proposed. Firstly, the kinematics and dynamics of conveying mechanism were derived by screw form. According to the Klein form of the screw, namely a bilinear symmetric form of the Lie algebrae(3), the transient analysis and evaluation index of the input/output motion / force instantaneous transfer efficiency was presented ,which was based on the ratio of the instantaneous powers of the end effector of the conveying mechanism and the instantaneous input powers of the input terminal. Furthermore, on the basis of the proposed evaluation method, the time varying curve of the instantaneous transfer efficiency of mechanism motion / force were obtained, and the average transfer efficiency of the motion / force was obtained. Finally, the simulations of the mechanism were carried out by using MATLAB software. The simulation results show that the evaluation index is reasonable and effective.
performance index; screw theory; conveying mechanism; motion/force transmission efficiency
2016-12-12
国家自然科学基金资助项目(51375210);江苏高校优势学科建设工程项目(苏政办发[2014]37号);镇江市工业科技支撑项目(GY2013062);镇江市京口区科技计划资助项目(jkGY2013002)
TH238
10.3969/j.issn.1004-132X.2017.18.002
朱明星,男,1978年生。江苏大学电气信息工程学院博士研究生,江苏科技大学公共教育学院副教授。研究方向为并联机器人建模和控制。高国琴(通信作者),女,1965年生。江苏大学电气信息工程学院教授、博士研究生导师。E-mail:gqgao@ujs.edu.cn。吴军,男,1978年生。清华大学机械系副教授。陈太平,男,1988年生。江苏大学电气信息工程学院硕士研究生。
猜你喜欢
农业机械学报(2021年10期)2021-11-09
北京测绘(2021年7期)2021-07-28
装备制造技术(2020年11期)2021-01-26
房地产导刊(2020年12期)2021-01-14
房地产导刊(2020年12期)2021-01-14
绿色科技(2019年22期)2019-12-30
高考·上(2019年1期)2019-09-10
北京航空航天大学学报(2014年1期)2014-12-19
科技资讯(2014年23期)2014-10-20
中学生数理化·高二版(2008年2期)2008-10-19
