
不同工况下飞机液冷车制冷换热系统PID控制的建模与仿真
2017-09-29 08:38李旭雷金果张永亮
装备环境工程 2017年9期
李旭,雷金果,张永亮
不同工况下飞机液冷车制冷换热系统PID控制的建模与仿真
李旭,雷金果,张永亮
(空军勤务学院 航空四站系,江苏 徐州 221000)
目的解决现有研究只考虑单一制冷工况,导致数学模型建立不精确,对飞机液冷车控制系统PID控制效果产生较为不利影响这一问题,提高控制系统的控制能力。方法根据飞机的保障需求和飞机液冷车的具体工况,分别建立制冷和制热两种工况下制冷换热系统的数学模型,并利用Simulink进行仿真研究。结果与单一制冷工况下所建立的数学模型相比,两种工况下所建立的数学模型其PID控制在制冷、制热工况下响应时间分别为2.1,3.1 min,短于单一制冷工况下所建立的数学模型(2.8,4.5 min)。系统误差分别为0.75%,0.51%,低于单一制冷工况(1.5%,0.71%)。结论在两种工况数学模型下的PID控制在响应速度、控制精度等方面均显示出更好的控制能力,具有良好的军事和工业应用前景。
飞机液冷车;制冷换热系统;数学模型;PID控制;仿真
飞机液冷车是在飞机环境控制液冷系统停止工作的状态下,用以控制飞机电子设备的工作环境温度的飞机地面环控保障装备[1]。对飞机液冷车温度实现最优控制,不仅可以保证飞机任务系统电子设备能够正常工作,并提高其工作效率,还可以降低电子设备故障率,延长其工作寿命,对于国家航空事业的发展和国防事业的建设均具有重大意义。
目前,我国飞机液冷车的温度控制主要采取PID控制方式[2]。该控制方式对于系统数学模型的准确度要求较高[3-4],模型越准确,控制效果越显著。目前研究的飞机液冷车制冷换热系统PID控制仅仅是针对制冷一种工况下的数学模型,且通常仅研究飞机液冷车的液冷机组换热情况[5],未考虑到液冷车通液管道的热量(或冷量)损失以及液体电加热器的工况。为此,文中依据飞机保障需求和飞机液冷车工况,建立制冷和制热两种工况下不同的数学模型,以弥补飞机液冷车制冷换热系统数学模型精确度较低的不足。
1 飞机液冷车工作原理
如图1所示,飞机液冷车制冷换热系统的工作原理[1]为:飞机液冷车通过两组输送橡胶软管(进口A和出口F)与飞机对接,输送与飞机相同的冷却液体介质(乙二醇水溶液),通过循环液体泵推动冷却液体循环流动,对飞机的电子冷板和需冷却的部位实施冷却(加热)。当飞机需要低温乙二醇水溶液保障时,飞机液冷车液冷机组开始工作,机组采用蒸汽压缩式制冷方式,通过板式换热器对乙二醇水溶液进行冷却,达到循环介质持续降温的目的;需要较高温度的乙二醇水溶液保障时,以电加热为热源,对溶液进行加热,以满足液体循环的温度要求。
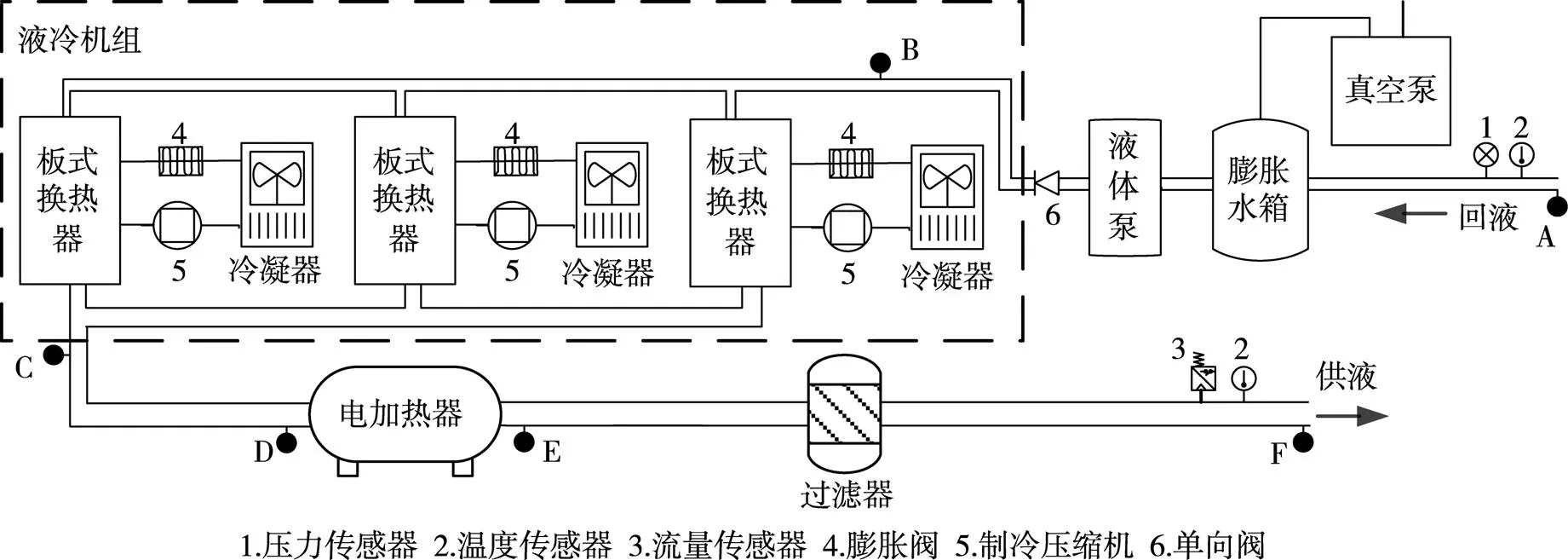
图1 飞机液冷车制冷换热系统工作原理
2 数学模型的建立
为了使飞机液冷车工艺流程分析得更有条理,以便数学模型的建立,不妨将其数学模型按具体工作流程分为AB,BC,CD,DE和EF等5段进行建模。
考虑到飞机液冷车内液体泵、膨胀水箱和过滤器等设备对流过的乙二醇水溶液温度的影响很小,可忽略不计。因此,在建立飞机液冷车数学模型时,取其传递函数均为:

2.1 AB段数学模型
在该段中,真空泵对飞机液冷车的膨胀水箱抽取真空,使水箱和管道相对飞机或者储液罐形成负压,使得飞机或者储液罐中的乙二醇水溶液由通液软管入口(点A处)进入飞机液冷车开始进行相关处理。
由于液体泵和膨胀水箱对流过的乙二醇水溶液温度的影响很小,可忽略不计,故而,AB段即可当成乙二醇水溶液在管道内的流动过程。管道由不锈钢内管和外加保温层构成,内管内径为1,外径为2,保温层外径为3,管道长为1,单位均为m。设乙二醇水溶液于点A处温度为A,于点B处温度为B,环境温度为w,单位均为℃。从点A至点B乙二醇热量变化为∆AB,单位为J,则[6]:

(3)
式中:AB表示AB段的热流量,W;AB为AB段乙二醇水溶液的平均温度,为计算简便取AB=(A+B)/2,℃;1,2分别为AB段管道内、外侧换热系数,W/(m2·℃);1,2分别为乙二醇水溶液、空气自然对流导热系数,W/(m·℃);r为乙二醇水溶液质量热容,J/(kg·℃);1为AB段管道内乙二醇水溶液质量,kg。
又:

式中:Δ为点A处乙二醇水溶液流至点B处所需时间,s。

故,飞机液冷车AB段输入温度A与输出温度B传递函数的近似表达式为:
(6)
由于CD段和EF段飞机液冷车内乙二醇水溶液工况与AB段相同,两段传递函数的推导过程也与上述AB段的推导过程相同,因而不再赘述,直接给出相应的传递函数表达式。
第3段CD段输入温度C与输出温度D的传递函数表达式为:
第5段EF段输入温度E与输出温度F的传递函数表达式为:
(8)
式(7)、(8)中:3,5分别表示CD段和EF段管道长度,m;3,5分别表示CD段和EF段管道内乙二醇水溶液质量,kg。
2.2 BC段数学模型
在该段中,乙二醇水溶液流入飞机液冷车的液冷机组当中。按照飞机保障需求的不同,可将飞机液冷车工作状态分为制冷降温和制热升温两种工况。对于两种不同的工况,液冷机组也分为制冷和非制冷两种不同的工况。按两种不同工况,分析液冷机组工作状态和板式换热器制冷换热情况,研究乙二醇水溶液于入口(点B处)和出口(点C处)温度关系,建立BC段输入温度B与输出温度C的微分方程和传递函数。
1)制冷工况。选取乙二醇水溶液于点B(换热器入口)处温度为输入量B,点C(换热器出口)处温度C为输出量,由板式换热器换热量计算公式[4]——=Δm,并根据能量守恒定律可知:

式中:表示板式换热器内乙二醇水溶液的热容,J/℃;为乙二醇水溶液的质量流量, kg/s;P为乙二醇水溶液定压比热容,J/(kg·℃);为板式换热器的换热系数,W/(m2·℃);为板式换热器的换热面积,m2;Δm为换热器的平均传热温差,℃。

则飞机液冷车BC段输入温度B与输出温度C传递函数的近似表达式为:
(11)
2)非制冷工况。当飞机需要较高温度的乙二醇水溶液保障的时候,例如冬季或者北方、高原严寒地区,飞机液冷车需要对回液的乙二醇水溶液进行加热处理。此时,飞机液冷车上的液冷机组处于非制冷工况,不工作,仅由下述DE段中的液体电加热器对乙二醇水溶液进行加热升温。因此,此时BC段飞机液冷车输入温度B与输出温度C传递函数的近似表达式为:

设变量,当液冷机组处于制冷工况时,=1;处于非制冷工况时,=0。综合制冷机组制冷工况和非制冷工况两种情况考虑,BC段飞机液冷车输入温度B与输出温度C传递函数的近似表达式可化为函数组:
(13)
2.3 DE段数学模型
飞机液冷车电加热器内部工况如图2所示。设乙二醇水溶液于点D(电加热器入口)处温度为D,热量为D,于点E(电加热器出口)处温度为E,热量为D。乙二醇水溶液进出电加热器时间∆内加热器制热量为,长为4。向外界环境传出(或由外界传入)的热量为w,外界环境温度为w。

图2 电加热器内部工况
由能量守恒定律可知,电加热器出口处乙二醇水溶液的热量等于其于入口处的热量加上溶液进出加热器时间∆内电加热器的制热量再减去溶液透过管道耗散的热量,其表达式为:
又因为:
(16)

式中:4为电加热器内乙二醇水溶液质量,kg;为溶液密度,kg/m3;n,w分别为电加热器内径和外径,m;为电加热器制热功率,W;n,w分别为电加热器内表面与乙二醇水溶液和外表面与空气的热交换系数,W/(m2·℃);为电加热器围护结构的导热系数, W/(m2·℃)。

因此,飞机液冷车DE段输入温度D与输出温度E传递函数的近似表达式为:
(19)
2.4 制冷换热系统数学模型
制冷换热系统是典型的大时滞系统,飞机液冷车制冷换热系统存在纯滞后时间常数,因此,飞机液冷车制冷换热系统的数学模型为:

式中:为纯滞后时间常数。
参考文献[5—8]并加以计算,可得出传递函数中参数值如下:r=3106 J/(kg·℃),p=4174 J/(kg·℃),=58.6 J/℃,=1097 kg/m3,=2.25 m2,=6000 W/(m2·℃),1=20.68 kg,3=1.38 kg,5=20.68 kg,=2.75 kg/s,1=15 m,3=1 m,5=15 m,n=0.3 m,=1.40(m·℃)/W,=0.087(m·℃)/W。为了方便计算,并考虑到飞机液冷车管道外均有保温层,保温性能好,因此,不妨将管道内乙二醇水溶液温度变化视为0。故而,飞机液冷车内乙二醇水溶液温度变化传递函数的近似表达式为:

式中:=0表示飞机液冷车制热工况;=1表示飞机液冷车制冷工况。
3 建模与仿真
3.1 仿真模型的建立
利用MATLAB软件中的仿真工具箱Simulink提供的功能模块,设计了飞机液冷车制冷换热系统PID控制仿真模型结构,如图3所示。为使仿真更接近实际的工作状况,参考文献[9—10]对仿真的反馈信号增加了白噪声干扰。

图3 不同工况下制冷换热系统PID控制仿真模型结构
3.2 仿真分析
为了综合比较和分析制冷、制热双工况模型下与单一工况模型下PID控制的优劣,对该控制方式下的飞机液冷车制冷换热系统同时进行了仿真。仿真中,假定制冷换热系统入口温度的初始值30 ℃,仿真的时间设定为20 min,目标出口温度设定为20 ℃,10 min后改为35 ℃。仿真结果即液冷介质实际输出温度与目标设定温度在系统进入稳态后的偏差仿真曲线如图4所示。
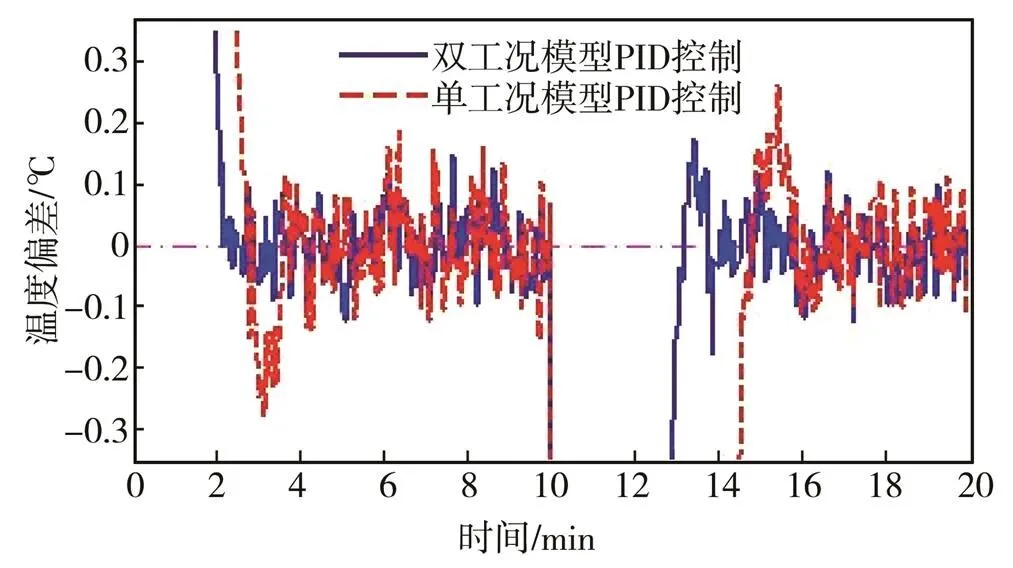
图4 不同工况模型下PID控制稳态温度偏差比较
1)0~10 min时间段。该时间段内,飞机液冷车出口处温度逐渐由初始温度30 ℃过渡到目标温度20 ℃,液冷介质下降10 ℃,系统处于制冷工况。制冷、制热双工况模型下的PID控制响应时间分别为2.1,2.8 min,系统稳态误差分别为0.75%和1.5%。两种模型比较,双工况模型下的PID控制响应时间短,稳态精度高。
2)10~20 min时间段。该时间段内,飞机液冷车出口处温度逐渐由20 ℃过渡到目标温度35 ℃,液冷介质温度上升15 ℃,系统处于制热工况。制冷、制热双工况模型下的PID控制响应时间分别为3.1,4.5 min,系统稳态误差分别为0.51%和0.71%。两种模型比较,双工况模型下的PID控制响应时间短,稳态精度高。
4 结语
在实际的飞行保障任务中,飞机液冷车往往会面对复杂多变的工作环境,此时,与仅考虑单一制冷工况的飞机液冷车数学模型相比,考虑制冷、制热两种工况的双工况数学模型下的PID控制方式具备更加优越的控制性能。文中通过飞机液冷车制冷换热系统单工况和双工况数学模型的建立及其PID控制的仿真研究,得出了在响应时间、控制精度、抗干扰性和适应性等方面,双工况模型下的PID控制均显示出更好的控制性能,具有良好的工业和军事应用前景。
[1] 许华, 赵爱华, 陈远波, 等. 飞机地面液体冷却车研制报告[R]. 济南: 空军济南四站厂, 2004.
[2] 张科, 周志刚, 吴兆林. 飞机地面加液冷却车的应用与发展[J]. 流体机械, 2009, 37(12): 80-84.
[3] 刘金琨. 先进PID控制及其MATLAB仿真[M]. 北京: 电子工业出版社, 2003.
[4] 王昕, 江航, 郑益慧, 等. 飞机空调车的多模型模糊PID控制器设计[J]. 控制工程, 2016, 23(4): 453-457.
[5] 唐华杰, 吴兆林, 周志刚. 飞机地面空调车和军用飞机地面液体冷却车的应用和发展[J]. 流体机械, 2006, 34(2): 72-75.
[6] 张天孙. 传热学[M]. 北京: 化学工业出版社, 2002.
[7] 秦叔经, 叶文邦. 换热器[M]. 北京: 中国电力出版社, 2006.
[8] GJB 1132—91, 飞机地面保障设备通用规范[S].
[9] 曹国庆, 涂光备, 安大伟, 等. 基于MATLAB的空调系统专家PID控制的建模与仿真[J]. 暖通空调, 2005, 35(11): 111-114.
[10] 丁国良. 制冷空调装置的计算机仿真技术[J]. 科学通报, 2006, 51(9): 998-1010.
Modeling and Simulation of PID Control for Refrigeration Heat Exchange System of Aircraft Liquid-cooling Carts in Different Working Conditions
LI Xu, LEI Jin-guo, ZHANG Yong-liang
(Department of Aviation Ground, Air force Logistics College, Jiangsu 221000, China)
The present studies usually just consider one working condition to build mathematical model, which makes the model inaccurate and makes the PID control of the control system have adverse control effects. To solve the problem and enhance the control ability of the system, two different mathematic models of the refrigeration heat exchange system in refrigeration and heating working conditions were built according to the needs of the aircrafts and the working condition of the aircraft liquid-cooling carts. And a simulation research was carried out based on Simulink. Compared to the mathematical model in single refrigeration working condition, the response time of the PID control in the models in the two conditions was 2.1 min and 3.1 min respectively, which was shorter than that of the PID control in the model of single refrigeration-2.8 min, 4.5 min. And the errors of the control system were 0.75%, 0.51%, which were shorter than the errors of the PID control in the model in single refrigeration-1.5%, 0.71%. The models in the two conditions have a better PID control ability in response speed, control accuracy, and have a good prospect for industrial and military applications.
aircraft liquid cooling cart; refrigeration heat exchange system; mathematical model; PID control; simulation
10.7643/ issn.1672-9242.2017.09.001
TJ05;TP391.9
A
1672-9242(2017)09-0001-05
2017-06-12;
2017-06-28
江苏省自然科学基金(SBK2015020623)
李旭(1993—),男,江苏宿迁人,硕士研究生,主要研究方向为航空四站保障技术与信息化。
雷金果(1963—),男,陕西富平人,博士,教授, 主要研究方向为航空四站保障。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
煤炭与化工(2022年1期)2022-03-19
中学生数理化(高中版.高考理化)(2021年10期)2021-12-06
军事文摘·科学少年(2021年7期)2021-09-26
军事文摘(2021年14期)2021-08-16
冰雪运动(2021年2期)2021-08-14
中学生数理化(高中版.高二数学)(2020年2期)2020-04-21
中学化学(2019年2期)2019-07-08
广东教育·高中(2017年9期)2017-09-27
创新科技(2014年16期)2014-12-22
