基于影像信息的火星表面非合作目标定位分析
2017-09-28 06:26:07张嵬李金岳
航天返回与遥感 2017年4期
张嵬 李金岳
基于影像信息的火星表面非合作目标定位分析
张嵬1,2李金岳1,2
(1 上海卫星工程研究所,上海201109)(2 上海市深空探测技术重点实验室,上海201109)
火星遥感探测任务中,火星表面原始非合作目标(即:火星原生态表面目标)定位信息的获取对于科学研究的开展及工程的实施具有重要意义,是火星遥感探测信息应用的重要内容之一。针对定位信息的误差建模分析将对提高火星表面非合作目标的定位精度提供关键指导。文章以火星探测器所搭载的光学轨道相机为影像信息获取手段,在所获取的影像数据基础上,分析并建模讨论了火星表面非合作目标定位信息的各影响误差项,涉及影像像元分辨率、探测器定位信息、探测器姿态信息、影像时统信息、火星表面高程信息及相机安装布局信息等,并结合实际算例,给出了提高目标定位精度的分析建议。作为创新点之一,文章以火星探测为背景,通过火星探测器与地面测控站间通信链路方式,完成了以影像信息为基础的定位误差分析完备性表述,该分析结果可为后续行星及小天体遥感成像探测的优化应用提供一定的参考。
影像数据 误差分析 轨道相机 非合作目标定位 火星探测器
0 引言
火星遥感探测任务的主要科学目标之一,是获取火星表面重点区域精细观测影像,开展火星形貌研究。具体针对沙丘、冰川、崩塌等可能具有动态变化特征的区域进行高精度成像,对其变化进行研究;针对干枯河床、沉积岩层等火星可能存在水的地区,开展火星表面形貌和地质构造研究。
除形貌探测研究外,作为遥感探测的重要基本信息,火星表面各非合作目标位置信息的获取具有重要科学及工程意义[1]。该信息可参与火星数字地图绘制、目标搜索与确定等。由于火星表面非合作目标定位任务属于深空探测任务,实施距离遥远,系统级的测量误差较之近地卫星的测量误差有所增大。对于合作目标,可以采用无线电测控、航迹推算、视觉测程及影像比对等综合手段进行确定[2-4],但对于非合作目标,利用火星探测器所摄取的影像信息解算获得目标定位信息的方法,可视作非合作目标定位的一个重要途径。
定位误差的分析是定位方法能否获得实际应用的重要前提。本文所讨论的目标定位误差分析,是以火星探测器搭载的轨道相机影像数据为基础,结合像元分辨率、探测器定位信息、探测器姿态信息、影像时统信息、火星表面高程信息及安装布局等信息,通过误差建模分析,完成火星表面目标定位精度的评估,并提供工程化指导。
1 定位误差分6790
目标影像定位误差,是指通过探测器光学遥感载荷在轨摄取的影像及相关辅助信息,经解算后获得的目标位置与其实际位置的偏差对于轨道相机,影响其影像定位误差的因素主要有[5-9]:1)影像像元分辨率信息;2)探测器定位信息;3)探测器姿态信息;4)影像时统信息;5)火星表面高程信息;6)安装布局信息;7)其他信息。这些影响因素均为相互独立的随机变量。
1.1 影像像元分辨率信息
本文所提轨道相机,其成像方式为时间延时积分电荷耦合器件[10-11](TDICCD)推扫成像方式,针对感兴趣待测目标,需首先确定目标所在摄影行内相机视轴与火星表面交点位置(作为定位基准),进行影像像元分辨率分析及像元计数[12-13]。该过程要考虑火星表面曲率对像元的畸变影响(尤其在探测器姿态机动成像时),以避免像元分辨率形成累积误差。
为了定量说明畸变的影响情况,以表1参数(参考典型火星遥感任务)进行了分析,计算结果如图1所示。
机动角度增大,火星表面曲率对影像像元分辨率影响随之增大。姿态机动40°情况下,曲率对分辨率的影响已超过11%。
根据影像判读目标在像面的位置,因其以像素为单位,故存在统计计数误差,如图2所示。
ʹʹ为影像边缘,ʹ为目标ʹ所在摄影行,相机视轴与火星表面交点为。对ʹ长度内的像元数量进行统计,并考虑分辨率畸变影响,可获得目标相对位置信息。
表1 火星表面曲率对影像像元分辨率影响计算参数
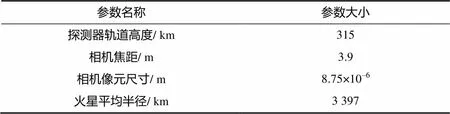
Tab.1 Calculation parameters on image pixel resolution influence by Mars surface curvature

图1 探测器姿态机动(40°)范围内影像像元分辨率变化情况(中心视场)
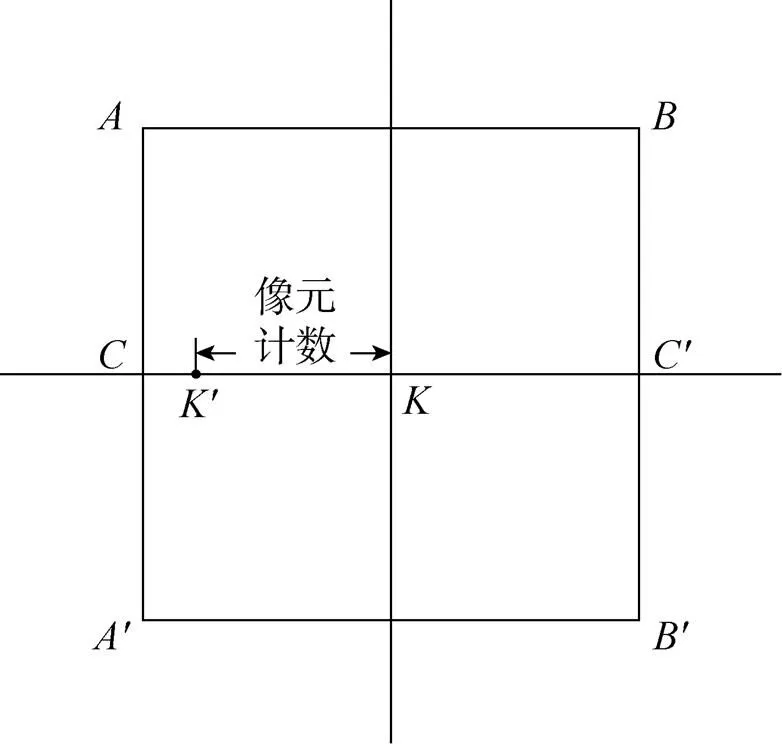
图2 同一摄影行内视轴火星表面交点与目标的位置关系示意
1.2 探测器定位信息
火星探测器定位信息的获取与近地卫星相比存在较大区别:探测器与地球间空间距离在0.5~2.5个天文单位(Astronomical Unit,AU)间,存在约8~40min的双向通信时延。近地卫星可以以全球定位系统(GPS)、北斗等天基导航系统或地面测控系统为手段实现测定轨,精度可达到mm量级[14],但无法直接应用于深空探测任务[15]。深空探测器测定轨则主要依靠地面甚长基线干涉(Very Long Baseline Interferometry,VLBI)[16]系统及地面测控系统二者共同完成。
VLBI技术为深空探测中的主要测轨手段,对于视线垂直方向上的轨道变化有很高的灵敏度,地面多谱勒测量技术在视线方向上轨道变化的灵敏度较高[17]。VLBI系统采用地面观测天线阵,同时接收探测器差分单向测距(Differential One-way Ranging Technique,DOR)信标信号,可检测垂直于视线方向的角度变化,其分辨能力由信标信号波长和天线阵在垂直于DOR信标方向的投影距离决定,其基本关系为:,即VLBI系统在垂直于视线方向的分辨能力与信标信号波长及投影距离的比值成正比关系。我国“嫦娥三号”卫星探测任务中,已实现月球车运动位置5~10cm测量精度[18]。
近地卫星的定位信息一般以地球惯性系进行描述,为实现探测器定位信息对火星表面目标的定位误差分析输入,需完成坐标系的转换,探测器测定轨信息流程如图3所示:
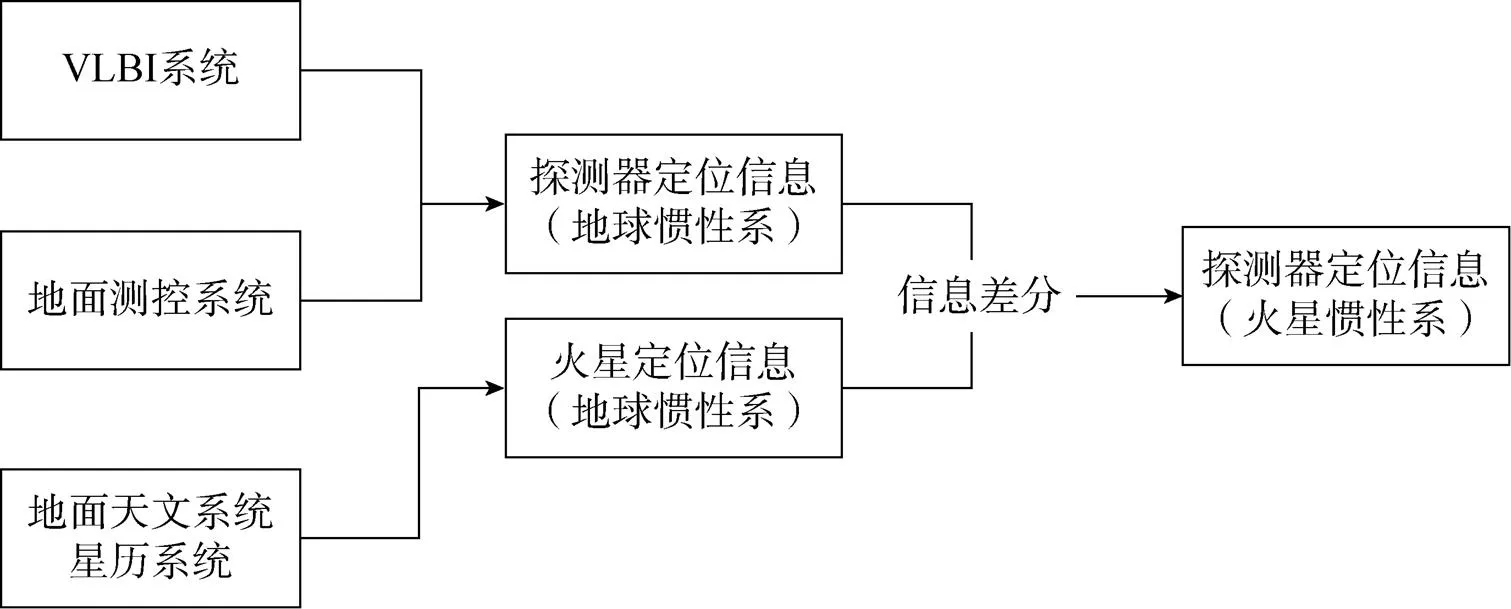
图3 探测器测定轨信息流程
根据探测器测定轨数据,经坐标转换后,在火星轨道坐标系下将探测器定位信息误差分解为三个方向分量:沿探测器航迹的切向定位误差∆、垂直于探测器航迹的法向定位误差∆和沿探测器器下点的径向定位误差∆S。
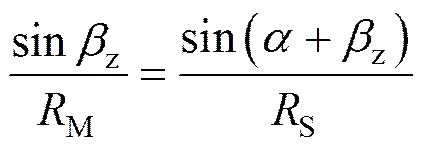
对探测器切向定位误差进行建模,该误差与火星表面目标定位误差几何关系如下图4所示。和ʹ分别对应探测器的真实位置和测量位置;和ʹ为上述两种情况下相机视轴与火星表面交点(即目标所在位置);M为火星平均半径;S和Sʹ为上述两种情况下探测器火心距;和ʹ为上述两种情况下探测器与火星几何中心连线与火星表面的交点与目标点连接弧段对火星几何中心(图中表示)的张角;0为上述两种情况下探测器位置对火星几何中心的张角;z为相机离轴前视角。后文相同符号定义与上述相同。
根据图中几何关系,相机影像切向定位误差∆I可由式(1)~(5)进行计算

(2)
(3)

(5)
对探测器法向定位误差进行建模,该误差与火星表面目标定位误差几何关系如图5所示。为探测器真实及测量两种位置情况下探测器位置对火星几何中心的张角。
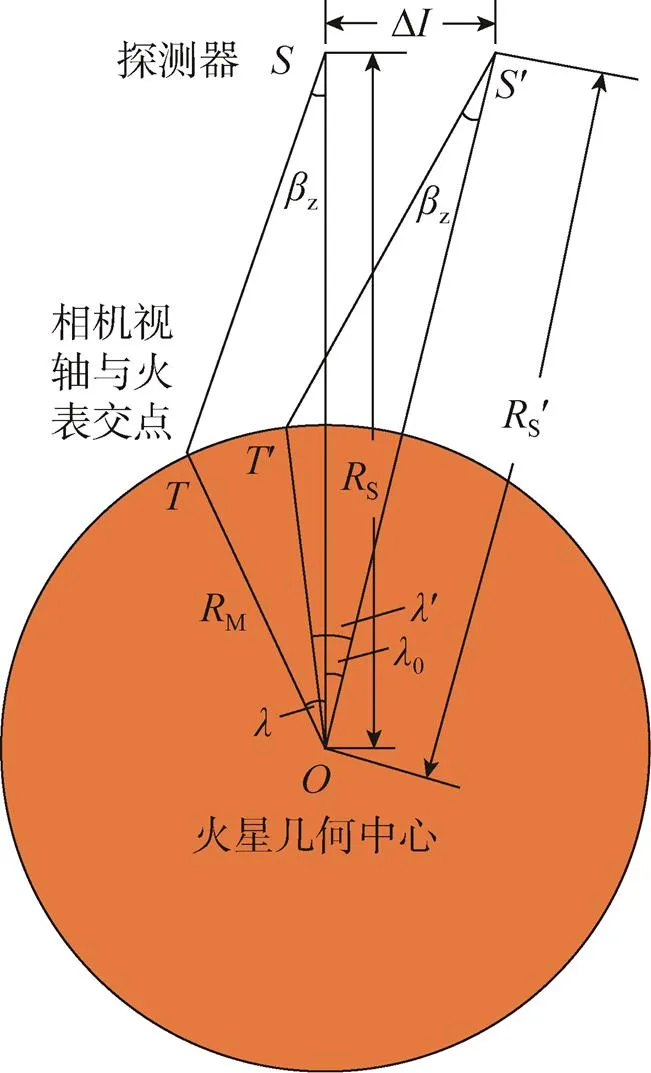
图4 探测器切向定位误差与火星表面目标定位误差几何关系
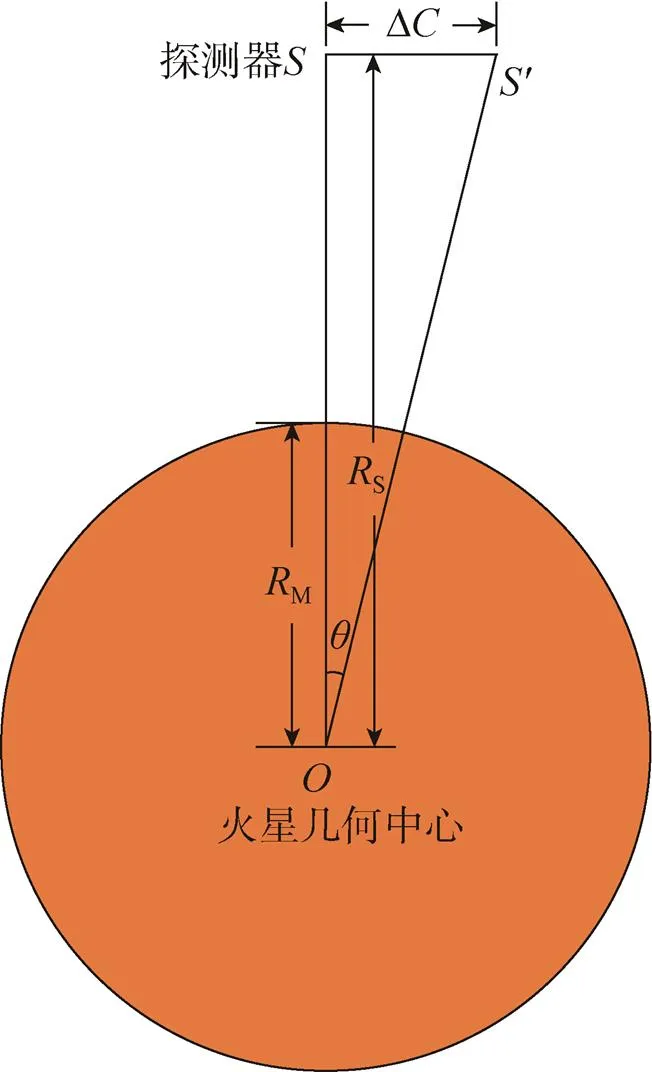
图5 探测器法向定位信息与火星表面目标定位误差几何关系
根据图中几何关系
(7)
根据式(6)、(7),可计算获得探测器法向定位误差对火星表面目标定位误差的影响。
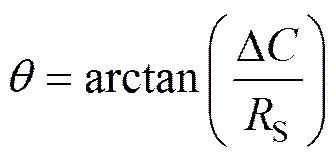
对探测器径向定位误差进行建模,可知该误差与火星表面目标定位误差几何关系如图6所示。和ʹ为探测器真实及测量两种位置情况下探测器器下点与目标点连接弧段对火星几何中心的张角。
根据图中几何关系
(9)
(10)
根据式(8)~(10)可计算获得探测器径向定位误差对火星表面目标定位误差的影响。
1.3 探测器姿态信息
火星探测器轨道相机与探测器为固连式安装,相机视轴与探测器姿态信息直接相关。对于探测器侧摆及俯仰机动模式,姿态测量误差对影像定位误差的影响形式相同,相互独立。探测器在轨姿态如图7所示。g为探测器器下点与目标点连接弧段对火星几何中心的张角。

图6 探测器径向定位信息与火星表面目标定位误差几何关系
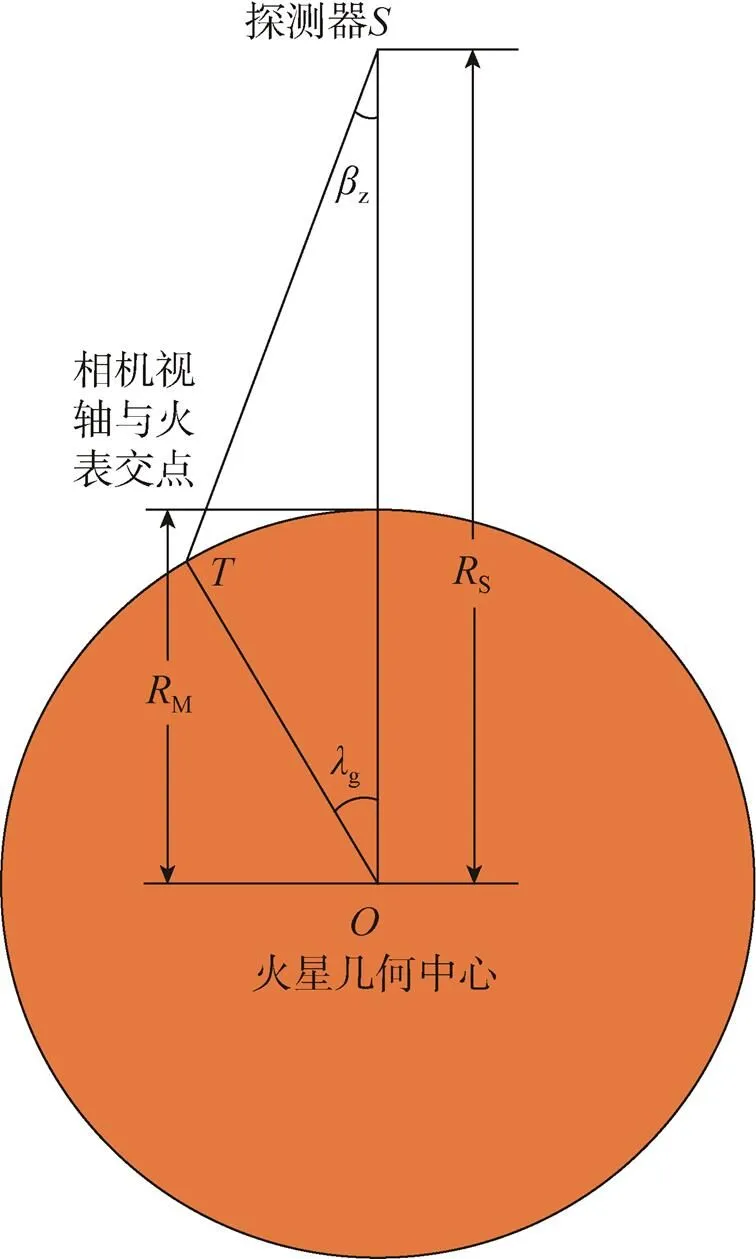
图7 探测器姿态与火星表面目标定位误差几何关系
探测器姿态信息对影像定位误差∆Ʃ的影响关系可表示为
式中 ∆和∆为探测器侧摆及俯仰姿态定姿误差。
1.4 影像时统信息
采用探测器轨道相机影像进行目标定位计算时,影像信息需配以相应时标。若时间信息失配,将影响到影像定位信息解算所需参数的选取,如探测器位置及姿态信息等。
令相机摄录时统误差为∆;探测器器下点速度为s;则因时间适配所等效的火星表面目标位置误差∆t可表示为
由上式可见,时统误差对火星表面目标定位误差的影响较大,椭圆探测轨道由于器下点速度因素,近火点的影响将更明显。
1.5 火星表面高程信息
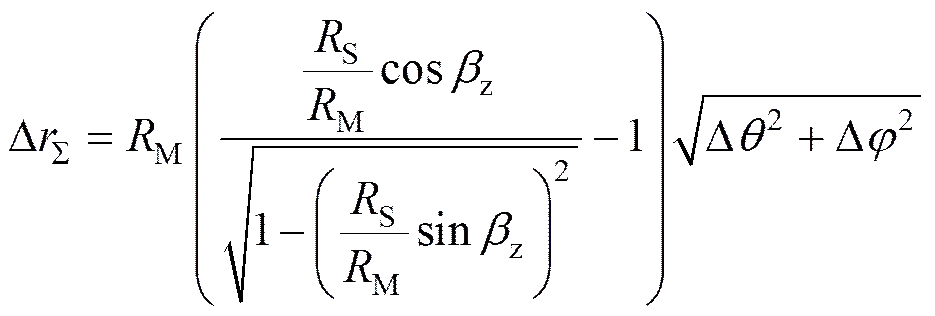
火星表面高程信息针对相机存在离轴前视的情况。相机推扫过程中,若目标高程高于参考面,由于前视角的存在,拍摄到目标的时刻将产生滞后,反之则超前,计算几何模型如下图8所示。L为考虑目标高程情况下的目标火星距,为探测器轨道相机视轴擦地角,12表示目标高程,记为∆T。
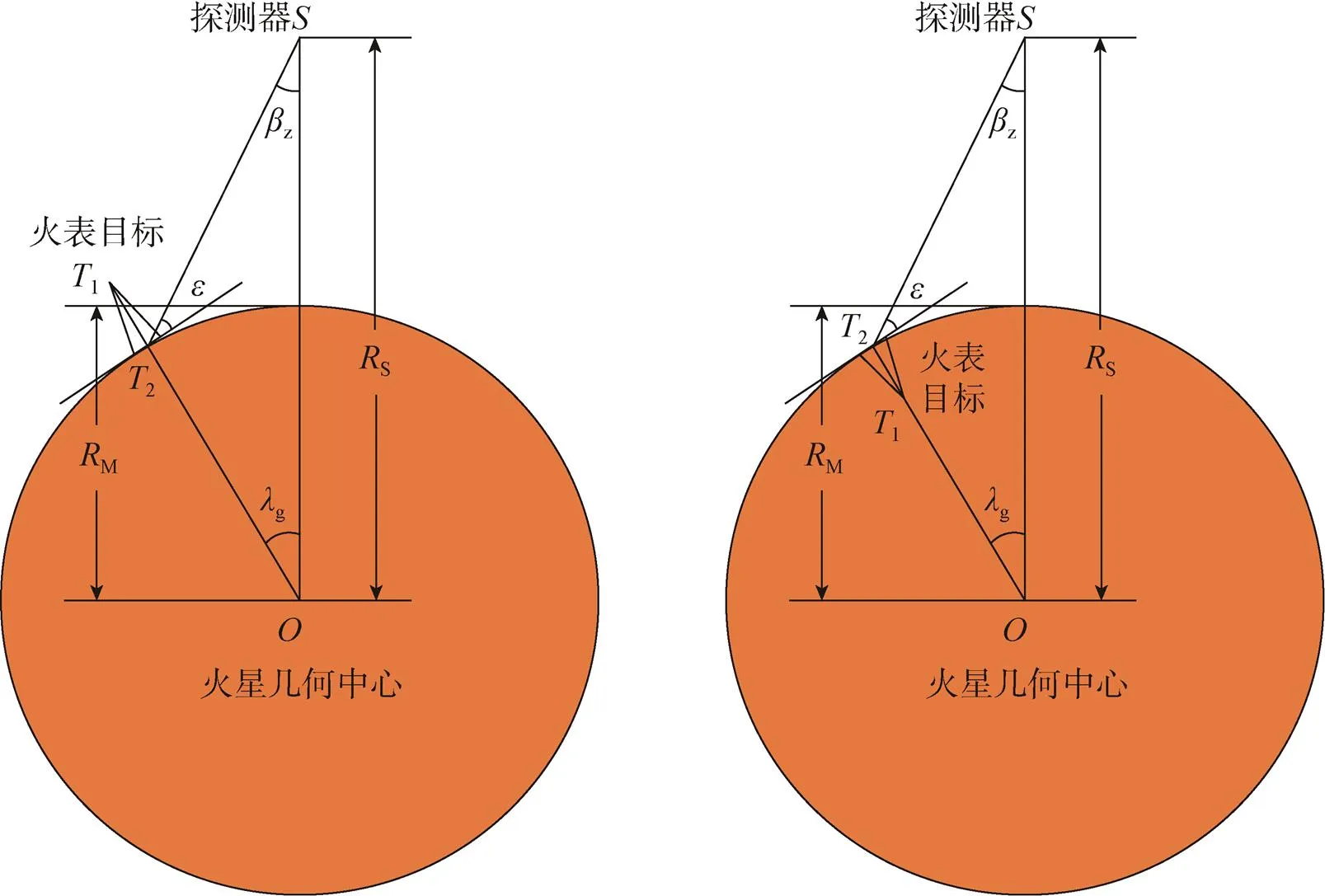
图8 火星表面目标高程对定位信息的影响示意
因相机前视角引起的火星表面目标高程对其影像的定位误差∆T表示为
1.6 安装布局信息
为满足火星探测器轨道相机成像要求,相机布局需具备一定的安装精度。对于无活动部件情况,相机视轴的测量误差将直接影响目标定位误差。在探测器本体坐标系下,相机采用固连安装形式。令∆z为相机离轴前视角测量误差,根据几何关系,离轴前视角测量误差对目标的定位误差可表示为
1.7 其他信息
火星探测器发射主动段环境(振动、噪声等)、在轨环境(重力释放、热变形等)将会使探测器及轨道相机结构产生微形变,并具有一定的随机性,较难把控。通过整器设计及地面试验,上述环境因素对火星表面目标定位误差的影响将得以有效抑制,此处不再详述。
此外,一些不可预见的因素也会对探测器影像定位误差产生影响,如影像摄录过程中火星大气传输路径的不确定变化等。大气传输路径的不确定性可依靠相机自身优化设计进行抑制,此处也不再详述。
2 计算实例与误差分析
为进一步印证上述误差分析过程的实用性,依据上述误差建模,并参考国外相关型号参数,按照表2开展了火星表面目标影像定位误差的实际分析。
表2 火星表面目标影像定位误差计算实例
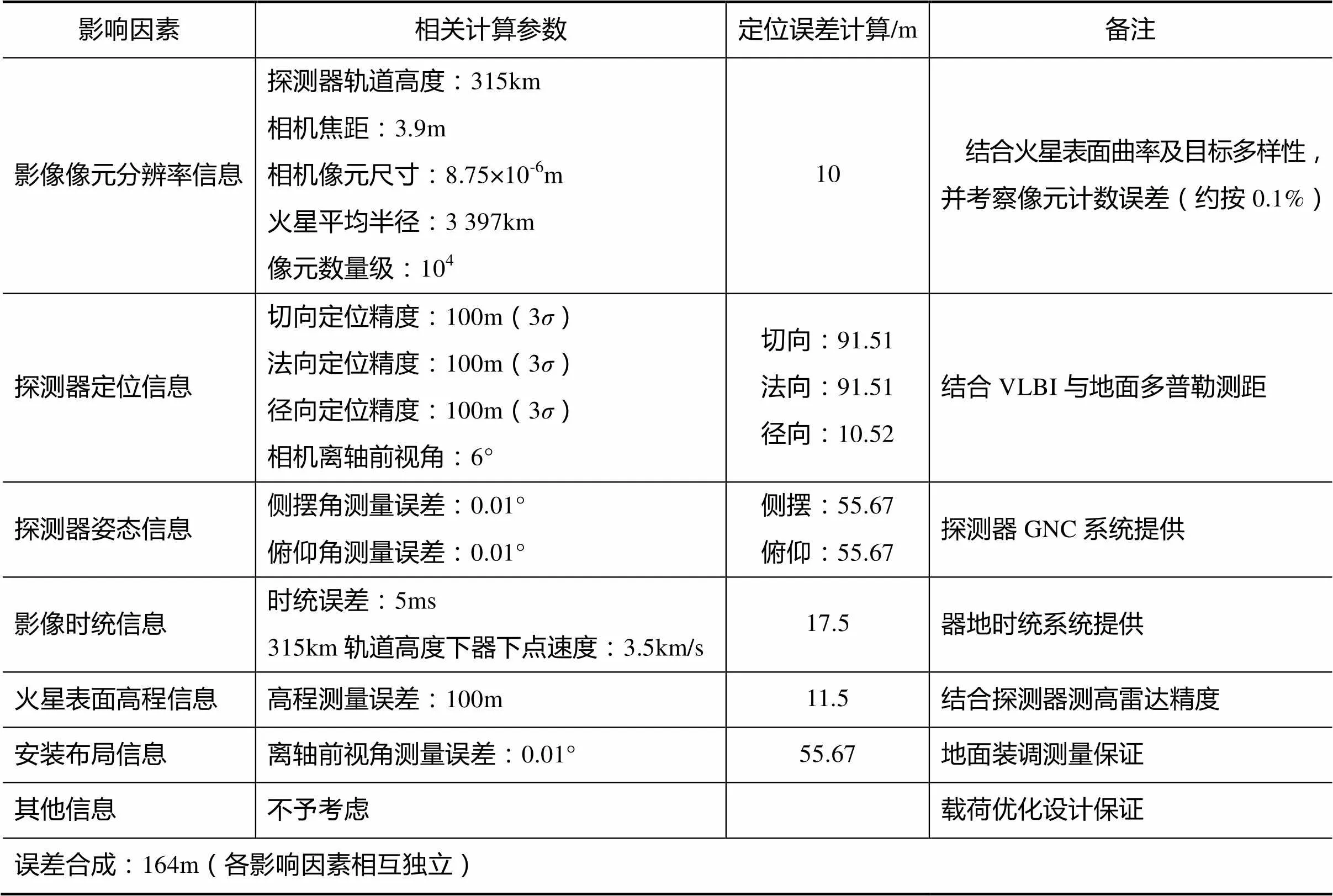
Tab.2 Calculation case of location error about Mars surface target image
根据上表分析计算结果,探测器定位信息、探测器姿态为影响火星表面目标定位误差的主要因素,所占权重较高。上述影响因素主要决定于地面测定轨系统及探测器导航、制导与控制分系统,在工程设计优化时应予以重视。
3 结束语
通过对基于影像信息的火星表面目标定位误差分析过程的介绍,结合火星探测器在轨飞行实际情况,明确了各影响因素的作用机理,通过建模及算例获悉当前工程水平下目标定位误差各影响因素的权重。本文分析和计算所得结论,对于后续深空探测项目中涉及影像数据应用范畴的研究工作,可提供一定的理论支持和工程参考。
[1] 袁孝康. 遥感卫星对地面目标测向定位研究[J]. 空间电子技术, 2005, 2(2): 1-9. YUAN Xiaokang. Study on Bearing Location of Remote-sensing Satellite Based on Ground Target Digital[J]. Space Electronic Technology, 2005, 2(2): 1-9. (in Chinese)
[2] 邸凯昌. 勇气号和机遇号火星车定位方法评述[J]. 航天器工程, 2009, 18(5):1-5. DI Kaichang. A Review of Spirit and Opportunity Rover Localization Methods[J]. Spacecraft Engineering, 2009, 18(5): 1-5. (in Chinese)
[3] MOURIKIS A I, ROUMELIOTIS S I. A Multi-state Constraint Kalman Filter for Vision-aided Inertial Navigation[C]//IEEE International Conference on Robotics and Automation, Roma: IEEE, 2007.
[4] MOURIKIS A I, TRAWNY N, ROUMELIOTIS S I, et al. Vision-aided Inertial Navigation for Spacecraft Entry, Descent, and Landing[J]. IEEE Transactions on Robotics, 2009, 25(2): 264-280.
[5] 袁孝康. 星载遥感器对地面目标的定位[J]. 上海航天, 2000, 17(3): 1-7. YUAN Xiaokang. Location of Ground Targets by Satellite-borne Remote Sensors[J]. Aerospace Shanghai, 2000, 17(3): 1-7. (in Chinese)
[6] 陆启省, 南树军, 白沁园, 等. 基于单星定位的火星着陆器初定位方法研究[J]. 航天返回与遥感, 2012, 33(6): 10-16.LU Qisheng, NAN Shujun, BAI Qinyuan, et al. Initial Location Method for Mars Lander Based on Single Satellite Location[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(6): 10-16. (in Chinese)
[7] 岳春宇, 何红艳, 鲍云飞, 等. 星载激光高度计几何定位误差传播分析[J]. 航天返回与遥感, 2014, 35(2): 81-86. YUE Chunyu, HE Hongyan, BAO Yunfei, et al. Study on Error Propagation of Space-borne Laser Altimeter Geometric Positioning[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(2): 81-86. (in Chinese)
[8] 贾贺, 荣伟. 火星探测器减速着陆技术分析[J]. 航天返回与遥感, 2010, 31(3): 6-14. JIA He, RONG Wei. Mars Exploration Deceleration Landing Technology Analysis[J]. Spacecraft Recovery & Remote Sensing, 2010, 31(3): 6-14. (in Chinese)
[9] 徐晴, 牛俊坡, 施伟璜, 等. 基于轨道器的火星着陆器定位及精度分析[J]. 航天返回与遥感, 2016, 37(6): 28-38. XU Qing, NIU Junpo, SHI Weihuang, et al. Positioning and Precision Analysis for Mars Lander Based on Orbiter Measurement[J]. Spacecraft Recovery & Remote Sensing, 2016, 37(6): 28-38. (in Chinese)
[10] 李强, 樊奔, 陈希. 一种基于多线阵集成TDICCD的低轨成像驱动方法[J]. 航天返回与遥感, 2016, 37(1): 32-40. LI Qiang, FAN Ben, CHEN Xi. Driving Method of Low Earth Orbit Imaging Based on Multi-linear TDICCD[J]. Spacecraft Recovery & Remote Sensing, 2016, 37(1): 32-40. (in Chinese)
[11] 马天波, 郭永飞, 李云飞. 科学级TDICCD相机的行频精度[J]. 光学精密工程, 2010, 18(9): 2028-2035. MA Tianbo, GUO Yongfei, LI Yunfei. Precision of Row Frequency of Scientific Grade TDICCD Camera[J]. Optics and Precision Engineering, 2010, 18(9): 2028-2035. (in Chinese)
[12] 佟首峰, 刘金国, 阮锦, 等. 推帚式TDICCD相机应用分析[J]. 系统工程与电子技术, 2001, 23(1): 33-37. TONG Shoufeng, LIU Jinguo, RUAN Jin, et al. An Analysis for Application Technique of Push-broom TDICCD Imaging Camera[J]. Chinese Journal of Nosocomiology Systems Engineering and Electronics, 2001, 23(1): 33-37. (in Chinese)
[13] 蒋光伟. TDICCD的空间分辨率特性[J]. 红外, 2001, 27(9): 17-21. JIANG Guangwei. The Spatial Resolution Characteristic of TDICCD[J]. Infrared, 2001, 27(9): 17-21. (in Chinese)
[14] 周三文, 谌明, 卢满宏. 卫星高精度测定轨方案探讨[J]. 遥测遥控, 2009, 30(4): 21-26. ZHOU Sanwen, CHEN Ming, LU Manhong. A Precise Orbit Determination Scheme for Satellites[J]. Journal of Telemetry, Tracking and Command, 2009, 30(4): 21-26. (in Chinese)
[15] 乔书波, 李金岭, 孙付平. VLBI在探月卫星定位中的应用分析[J]. 测绘学报, 2007, 36(3): 262-268. QIAO Shubo, LI Jinling, SUN Fuping. Application Analysis of Lunar Exploration Satellite Positioning by VLBI Technique[J]. Acta Geodaetica et Cartographica Sinica, 2007, 36(3): 262-268. (in Chinese)
[16] HU H, GU D. Landmark-based Navigation of Industrial Mobile Robots[J]. Industrial Robot: An International Journal, 2000, 27(6): 458-467.
[17] 刘庆会, 史弦, 王伟华, 等. 超高精度的甚长基线干涉相位时延推导法及其在我国的应用前景[J]. 物理, 2009, 38(10): 712-716. LIU Qinghui, SHI Xian, WANG Weihua, et al. High-accuracy Determination of Very Long Baseline Interferometry Phase Delays and Its Applications in Chinaʹs Future Missions[J]. Physics, 2009, 38(10): 712-716 . (in Chinese)
[18] 刘庆会, 吴亚军. 高精度VLBI技术在深空探测中的应用[J]. 深空探测学报, 2015, 2(3): 208-212. LIU Qinghui, WU Yajun. Application of High Precision VLBI Technology in Deep Space Exploration[J]. Journal of Deep Space Exploration, 2015, 2(3): 208-212. (in Chinese)
(编辑:庞冰)
Precision Analysis on Non-cooperative Target Location of Mars Surface Based on Camera Image Data
ZHANG Wei1,2LI Jinyue1,2
(1 Shanghai Institute of Satellite Engineering, Shanghai 201109, China)(2 Shanghai Key Laboratory of Deep Space Exploration Technology, Shanghai 201109, China)
In the mission of Mars remote sensing exploration, acquisition of original non-cooperative target location information on Mars surface is significantly important for science research and engineering implementation, it is also one of the key items of application on remote sensing information from Mars. Precision analysis aimed at location information will provide key instruction to enhance location precision of non-cooperative target on Mars surface. In this paper, the orbit camera loaded by Mars probe is treated as the means for image information acquisition. Based on the acquired image data, each of error items on Mars surface non-cooperative target is modeled and discussed, including image pixel resolution, probe location, probe attitude, image time unification, Mars surface elevation, assembly layout, and some other information. An actual calculation case to provide analysis proposal for the enhancement about location accuracy of Mars surface target is shown in this paper. As one of the innovation point, this paper fulfilled the completeness statement of location precision analysis based on the image information by the usage of probe-earth circle with the background of Mars exploration. The analysis outcome can provide some engineering instruction for the optimizing application of subsequent remote-sensing and imaging detection on planet and small body.
image data; error analysis; orbit camera; non-cooperative target location; Mars probe
V419+.9
A
1009-8518(2017)04-0027-09
10.3969/j.issn.1009-8518.2017.04.004
张嵬,男,1976年生,2005年获上海理工大学光学工程专业工学硕士学位,高级工程师。研究方向为深空探测与空间科学总体技术及载荷应用技术。Email:zw1229@126.com。
2017-05-02
猜你喜欢
海外文摘(2021年7期)2021-08-31 21:33:44
导航定位与授时(2020年5期)2020-09-23 03:05:00
大科技·百科新说(2020年10期)2020-03-01 05:25:19
小学科学(2020年1期)2020-02-18 06:26:40
铁道通信信号(2020年9期)2020-02-06 09:16:06
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
小学科学(2019年12期)2019-01-06 03:38:45
知识经济·中国直销(2018年3期)2018-04-12 06:43:37
学习月刊(2015年1期)2015-07-11 01:51:12
太空探索(2014年9期)2014-07-10 13:06:30