
白酒码垛机器人静力学分析与结构优化
2017-09-23 02:48:38李江
装备制造技术 2017年7期
李江
白酒码垛机器人静力学分析与结构优化
李江
(四川大西洋焊接材料股份有限公司,四川自贡643000)
以白酒码垛机器人为研究对象,利用SolidWorks建立了白酒码垛机器人后臂的三维模型。采用ABAQUS软件对自动码垛机器人重要部件的有限元模型进行静力结构分析,获得了重要部件的应变、应力云图,并根据分析结果优化其结构。优化结果表明:改进后的后臂变形由0.486 4 mm降低到0.090 69 mm,优化增加了码垛机器人的静刚度,满足材料要求的应变范围。该分析方法对自动码垛机器人的设计与改进具有一定的指导意义。
码垛机器人;静力结构分析;结构优化;有限元分析;ABAQUS
码垛是连接白酒包装和仓储的重要环节,在白酒的生产物流中有着重要的地位。码垛机器人可以将不同外形尺寸的包装货物整齐地、自动地码在托盘上。采用码垛机器人系统可以显著地减少人工,提高生产效率,基本可完成48 000瓶/小时甚至60 000瓶/小时全自动白酒包装线码垛要求。目前欧、美、日的码垛机器人在码垛市场的占有率超过了90%,绝大数码垛作业由码垛机器人完成。码垛机器人能适应于纸箱、袋装、罐装、箱体、瓶装等各种形状的包装成品码垛作业,这也是我国白酒业码垛发展的必然选择之一[1]。
在码垛机器人的结构设计过程中,静力学分析是一个重要的步骤。对机器人的静力学分析,可以使设计人员了解机器人的各部分的应力、应变分布[2],从而清楚地了解设计中存在的缺陷和结构上的薄弱环节。本文借助机械仿真设计SolidWorks软件与有限元仿真软件ABAQUS,对白酒包装码垛机器人的主要构件进行静力学分析,并根据结果对零件结构进行优化和改进,最终达到使其安全运行的目的[3]。
1 码垛机器人的结构与材料属性
白酒包装自动码垛机器人结构如图1所示,其主要构件为前后臂和底座,前后臂均采用铝合金,旋转底座的圆盘的材料采用铝合金,其他部分采用45#钢[4]。材料的物理属性如表1所示。

图1 码垛机器人结构示意图

表1 铝合金与45#钢的物理属性
2 后部大臂的有限元分析
2.1 后部大臂的建模
采用SolidWorks软件建立后部大臂的三维模型,再将三维模型导入ABAQUS,使用结构化网格技术划分网格,网格类型采用C3D8,雅克比设置为4点[5],单元尺寸为16.496 5 mm.
2.2 确定边界条件
白酒包装码垛机器人后部大臂的受力情况如图2所示,图中F1是码垛机器人在做整体回转运动时的惯性力,取F1=330 N.F2和F3是码垛机器人通过前臂传递过来的力,取F2=0,F3=600 N.

图2 后臂受力示意图
2.3 数值模拟结果及分析
应变与最大应力是判断码垛机器人能否安全运作的重要因素,通过ABAQUS软件对码垛机器人后臂进行有限元静力结构分析,得到它在上述工况条件下的最大变形与最大应力,分别如图3、图4所示。

图3 后部大臂应变云图

图4 后部大臂应力云图
根据后部大臂的应变云图可知最大变形为0.4864 mm,根据要求,后部大臂的变形应小于0.2 mm,因此变形超出了允许范围。铝合金的屈服强度为195 MPa,抗拉强度175 MPa,分析结果得到三个方向的最大和最小应力如表2所示。

表2 后臂各向应力
安全系数取n=1.5,因此[σ]=195/1.5=130 MPa,11.91 MPa<11.91 MPa,因此后部大臂的结构和材料满足要求。
2.4 结构优化与分析
通过ABAQUS数值模拟和结果分析表明:后臂在该工况条件下,应变超过了允许的数值范围,是白酒包装码垛机器人不能安全运行[6]。因此,本文对码垛机器人的后臂进行了优化改进。机器人臂部在扭转时会在薄壁处产生较大的切应力,分析时将薄壁看做由许多狭长的矩形截面组成,再把各个截面求和。薄壁杆的最大切应力可由下式计算:

其中Ω表示薄壁截面的中心所围成的面积。把一个外力偶M施加到臂部的截面杆上,产生的切应力为:

其中h为截面长度,b为截面宽度,δ为壁厚。
为保证码垛机器人后臂使用安全,必须增加后臂厚度,并要保证为等壁厚且截面为矩形,这样可以减小扭转切应力,增强抗扭性。考虑到码垛机器人的受力平衡和以及运动时会产生惯性切应力,所以又在后部大臂上附加一个辅助后臂,以减小惯性冲击。将结构优化后的模型再次导入ABAQUS进行分析,优化后的后部大臂应力应变云图如图5、图6所示。

图5 后臂的优化应力云图

图6 后部大臂的优化应变云图
从云图上可以看出,优化后,后部大臂的最大变形为0.09069 mm,在允许范围之内,后部大臂优化后的三个方向的最大、最小应力的分析结果如表3所示。
表3 后部大臂优化后的受力情况
由表可知,后部大臂优化后,最大应力为2.77 MPa,各项指标均达到满足了材料强度要求。
3 前大臂静力学分析
3.1 边界条件
前大臂的受力情况如图7所示,图中F3是码垛机器人在做整体回转运动时的惯性力,取F3=130 N.F1和F2是码垛机器人末端执行器传递过来的力,取F1=260 N,F2=0.
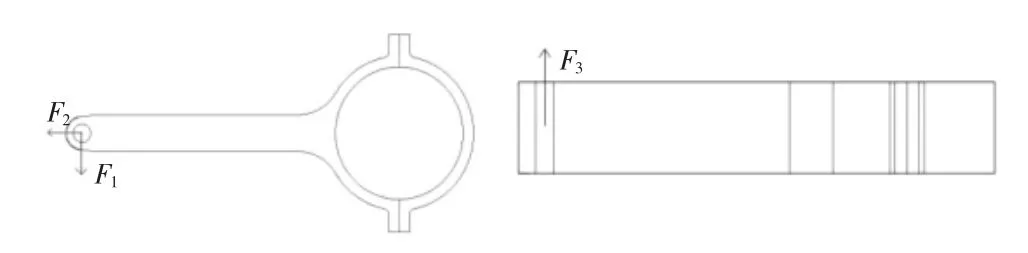
图7 前大臂受力示意图
3.2 分析结果
前大臂采用同样的分析方法,获得应变、应力云图,如图8、9所示。前臂最大应变为0.089 65 mm,在允许范围之内;而最大应力为5.03 MPa,远远小于许用应力。因此,前臂在该工况条件下能安全运行。

图8 前臂应力云图

图9 前臂应变云图
4 结论
运用三维建模软件和ABAQUS对白酒包装自动码垛机器人的主要部件进行静力学分析,并根据分析结果对码垛机器人的结构进行优化,得到如下结论:
(1)在该工况条件下,前臂和底座的静刚度均满足材料力学性能,而后臂的变形量超出了允许的范围量,导致白酒包装自动码垛机器人不能安全运行。
(2)增加后臂的壁厚,显著提高了其静刚度,使其最大应变从0.486 4 mm降低到0.090 69 mm,优化效果明显。
(3)该分析方法对自动码垛机器人的设计与改进具有一定的指导意义。
[1]王玉蓉.我国啤酒码垛及设备应用研究[J].湖北经济学院学报(人文社会科学版),2010,7(7):65-66.
[2]李倩,刘广亮,孙洁.码垛机器人本体结构分析与性能研究[J].装备制造技术,2011(1):4-6.
[3]梅江平,曹家鑫,张新,等.采用SolidWorks的高速重载码垛机器人的静力学分析和结构优化[J].现代制造工程,2012(10):18-22.
[4]张明,何庆中,郭帅.酒箱码垛机器人的机构设计与运动仿真分析[J].包装工程,2013,34(1):83-87.
[5]庄茁,由小川,廖建晖,等.基于ABAQUS的有限元分析和应用[M].北京:清华大学出版社,2009.
[6]何庆中,王明超,赵献丹.基于Solidworks Simulation的码垛机械末端执行器导杆静力学分析[J].四川理工学院学报(自然科学版),2011,24(1):109-112.
Static Analysis and Structural Optimization for the Liquor PalletizingRobot
LI Jiang
(Sichuan Atlantic China Welding Consumables,INC.Zigong Sichuan 643010,China)
Taking the liquor palletizing robot as the research object,and using SolidWorks to establish the threedimensional model of the rear arm of the palletizing robot.The static structural analysis of the finite element model of the important parts of the palletizing robot was carried out by using the ABAQUS.The strain and stress nephogram of the important components are obtained.According to the results,the structure is optimized.The optimization results show that the deformation of the improved rear arm is reduced from 0.4864mm to 0.09069mm,and the static stiffness of the palletizing robot is increased to meet the material requirements.The analysis method has certain guiding significance for the design and improvement of the palletizing robot.
palletizingrobot;staticstructuralanalysis;structural optimization;finite element analysis;ABAQUS
TS261.3
A
1672-545X(2017)07-0035-03
2017-04-08
李江(1964-),男,四川自贡人,学士,工程师,从事机械设计及制造方面的研究。
猜你喜欢
环境技术(2021年4期)2021-09-11 08:26:06
装备制造技术(2020年3期)2020-12-25 05:22:06
重型机械(2020年3期)2020-08-24 08:31:48
电子制作(2019年20期)2019-12-04 03:51:36
中国农资(2019年44期)2019-12-03 03:10:46
名家名作(2017年3期)2017-09-15 11:13:37
载人航天(2016年4期)2016-12-01 06:56:21
光学精密工程(2016年4期)2016-11-07 09:05:37
小天使·四年级语数英综合(2015年3期)2015-04-20 18:01:32
综合智慧能源(2014年1期)2014-09-10 07:07:40
