基于扩展卡尔曼滤波的MIMO迭代信道估计方法
2017-09-15 10:49李明富廖勇沈轩帆
电信科学 2017年9期
李明富,廖勇,沈轩帆
(1. 成都航空职业技术学院科技处,四川 成都 610100;2. 重庆大学通信与测控中心,重庆 400044)
基于扩展卡尔曼滤波的MIMO迭代信道估计方法
李明富1,廖勇2,沈轩帆2
(1. 成都航空职业技术学院科技处,四川 成都 610100;2. 重庆大学通信与测控中心,重庆 400044)
针对高速移动场景下信道快衰落、非平稳等特性导致下行链路信道估计性能受限的问题,提出了一种适用于高速移动环境下行链路的MIMO信道估计方法。采用自回归过程对信道建模,构造自反馈的扩展卡尔曼滤波器(EKF)追踪信道响应及其时域相关系数。采用迭代接收机的结构解决了在 MIMO环境下观测方程欠定的问题。仿真结果表明,在高速移动环境下所提方法相较于最小二乘估计等传统方法提升了信道估计的均方误差和系统的误码率性能,可应用于高速列车无线通信设备的接收机基带信号处理系统。
MIMO;OFDM;高速移动;非平稳信道估计;扩展卡尔曼滤波器
1 引言
随着高速铁路的不断发展,应用在高速环境下的移动通信系统日渐成为研究的热点。下行链路的信道估计作为基于长期演进(long term evolution,LTE)协议的移动通信系统接收机设计中的重要环节,受到了广泛的关注[1,2]。最新的一系列关于高速信道模型的研究发现[3-5],在高铁环境下的信道响应不仅受到多径效应和快衰落的影响,同时由于列车的高速移动,列车所处电磁环境中的散射体也呈现出快速变化的特征,导致信道响应呈现出时域和空域的非平稳性,这将对接收机的信道估计环节带来更多挑战。
从系统设计的角度来看,信道估计可以看作一个系统状态估计问题。若将时域变化的信道看作一个非线性的动态系统,便可以利用卡尔曼滤波器(Kalman filter,KF)对其状态变量求最小均方误差(minimum mean square error,MMSE)估计[6]。然而目前关于使用KF对非平稳信道估计的相关研究仍然是空白,其难点在于在构建 KF的状态转移方程时,需要先将信道建模为一个自回归过程,而对于非平稳的信道,这个自回归过程的参数(即信道的时域自相关系数)是时变的,换言之,对于整个系统而言,状态转移矩阵是未知的。同时对于 MIMO(multiple input multiple output,多输入多输出)信道而言,使用KF进行信道响应估计时,在接收机中仅仅能够得到与接收天线数量相等的观测方程,而信道矩阵中待估计的信道参数等于发射天线数与接收天线数的乘积,这将导致观测方程欠定,以至于无法完成状态变量估计的问题。
为解决上述存在的问题,本文采用了扩展卡尔曼滤波器[7](extended Kalman filter,EKF)的结构,以联合估计信道的时域相关系数和信道的频域响应;另一方面,本文采用了迭代接收机的结构[8,9],通过迭代反馈估计的方法,将观测方程中非待估计子MIMO信道的信道响应视为干扰,并利用先验的信道估计值将其消除,以构造正定的观测方程组,实现迭代的信道估计,以提升信道估计的精度。最后通过MATLAB仿真,对比分析了本文所提方法与传统信道估计插值方法在不同速度环境下的性能表现。
2 系统模型
LTE标准中,基于EKF的下行信道 MIMOOFDM系统如图1所示。在LTE下行物理帧中,导频符号均匀地插入资源网格,而导频符号本身及其时频域位置收发双方均已知。在基于LTE的通信系统中,接收端利用导频符号估计信道频域响应(channel frequency response,CFR),再利用估计得到的CFR做信道均衡处理,以尽可能地恢复出发送的OFDM符号,再进行解调和译码。

图1 基于EKF的下行信道MIMO-OFDM系统
在MIMO-OFDM系统中,每一个子帧有N个子载波,其中有NS个导频子载波,共有Nt根发射天线,Nr根接收天线。令第i个OFDM符号上的MIMO无线信道的信道矩阵为:

由此可以建立 MIMO-OFDM通信系统在导频子载波处的模型如下:

有研究表明,快衰落多径信道可以建模为自回归过程,且该模型适用于移动通信中的衰落信道[10,11]。参考文献[11]阐述了一阶自回归过程是无线信道的一个近似模型,这一模型比较接近现实情况,同时又避免了使用更高阶的模型带来高昂的计算代价。综合考虑,此处使用一阶自回归过程对信道的时域变化过程进行建模:
其中,rpq(k)为第q根发射天线到第p根接收天线的子信道的第 k个子载波上信道的时域相关系数,vpq(i)(k)为信道转移过程的过程噪声,是与信道响应相互独立的零均值复高斯变量,均值为 0,方差为。

大多数的信道自回归模型的文献中总是以Jakes模型作为信道自回归模型的依据,即:

其中,J0()表示零阶贝塞尔函数, fd表示各子信道的最大多普勒频移, Ts表示系统的采样间隔。然而这一结论仅仅适用于时域平稳信道的信道模型,即信道响应的时域自相关系数仅与时间间隔T
s( NS-k)有关,而并非一个时变的参数。但最新的一些关于高速移动场景下信道模型的研究表明[3-5],在高速移动的场景下,信道呈现出时域的非平稳性,则式(4)中的结论将不再正确,此时信道的时域相关系数将变为一个时变的参数。为此在本文中将建立EKF联合估计信道的时域相关系数rpq(i|i-1)(k )以及信道的频域响应hpq(i)(k)。
3 EKF信道估计与检测
本节主要设计了一种基于EKF的时域插值信道估计方法,首先采用最小二乘[12](least square,LS)方法进行一次信道频域响应的估计,之后利用迭代接收机的结构,根据软入软出的 Turbo译码器反馈的后验对数似然比构造 EKF的加权矩阵,同时利用LS的信道估计结果构造MIMO下EKF的状态空间模型,利用迭代估计的方法提升信道估计的精度[13,14]。
3.1 迭代检测译码
当接收机接收到符号后,首先利用LS方法配合线性插值获得初始的信道估计矩阵,之后根据进行均衡解调,并将其结果输入软入软出的 Turbo译码器,得到数据的后验对数似然比La( cl),并利用La( cl)构造 EKF的加权矩阵,进而构造EKF的状态空间模型,并进行迭代的信道估计以提高估计的精度。
将对数似然比La( cl)转换成为码元的概率P( cl),如式(5)所示:

由于经过了随机交织,可以假设码元之间相互独立。设S为M阶调制的星座点集合,可以得到符号概率如下:

其中, bl为表示星座点Sm的比特流。

将第i个符号时间上各个导频子载波的预判决符号构成一个对角阵p(i),进而可以得到发送矩阵。至此得到了EKF的加权矩阵,下一步将构造EKF的状态空间模型。
3.2 EKF的状态空间模型
设系统中共有N个子载波,其中导频子载波总数为 NS,根据式(4)和式(5),直接构造卡尔曼滤波器的状态空间模型是无法进行参数估计的,因为在式(4)的观测方程组中,Hi包含Nt×Nr个待估计的变量,但仅仅能够获得Nr个观测方程。显然,对于一个欠定的观测方程组,是无法利用卡尔曼滤波器估计其状态变量的。
根据上述描述,可以先构造一个一般卡尔曼滤波器的状态空间模型如下:


图2 基于EKF的MIMO信道估计器结构
下一步,为了构造扩展卡尔曼滤波器同时估计时域相关系数Ri和信道频域响应hi,构造状态转移向量满足则可将式(8)重新构造如下:

其中,εi定义为 ri的过程噪声,是独立的零均值高斯白噪声,协方差为。虽然信道响应具有快时变特性,但在相邻符号时间内信道时域相关系数的变化并不明显,因此假设 ri的状态转移过程仅受过程噪声 εi的影响。为状态变量 hi和状态转移向量 ri,构造新的状态变量 zi为。则可重新构造系统的状态空间方程如下:



3.3 EKF的更新方程
如图2所示,EKF有两种工作模式,分别为训练模式和更新模式。
当第(i–1)个符号时间上接收到导频符号yi-1时,EKF工作在训练模式下,由于收发双方都已知导频符号,此时EKF通过LS的信道估计方法获取导频符号位置处的信道响应。
当 EKF接收到导频子载波上的数据符号yi时,EKF进入更新模式。

再将观测变量yi代入测量更新方程,求解状态变量的后验估计值i。测量更新方程如下:

其中,Ki为卡尔曼滤波器的增益。
4 仿真分析
本文采用 MATLAB对所提的方法进行了仿真分析,仿真系统参数见表1。

表1 仿真系统参数
图3比较了LS方法与迭代1次的EKF方法在不同速度环境下的归一化均方误差(normalized mean squared error,NMSE)性能。从仿真结果上看,在速度为50 km/h时EKF相对于LS方法性能增益为3 dB左右,这是由于在低速环境中,信道响应的时频域变化比较平缓,利用线性插值方法依然能够较好地逼近实际信道响应。而在速度为300 km/h时,EKF相较于LS方法其均方误差性能有6 dB的SNR峰值增益。这是因为在高速环境下,LS估计配合线性插值的方法假定两个导频符号间信道响应的时域相关性是不变的,因此无法追踪快速时变的信道响应;而基于EKF的方法能够随信道的变化及时调整状态转移矩阵,再加上迭代接收机的结构带来的编码增益,使得EKF在高速环境下有更佳的表现。
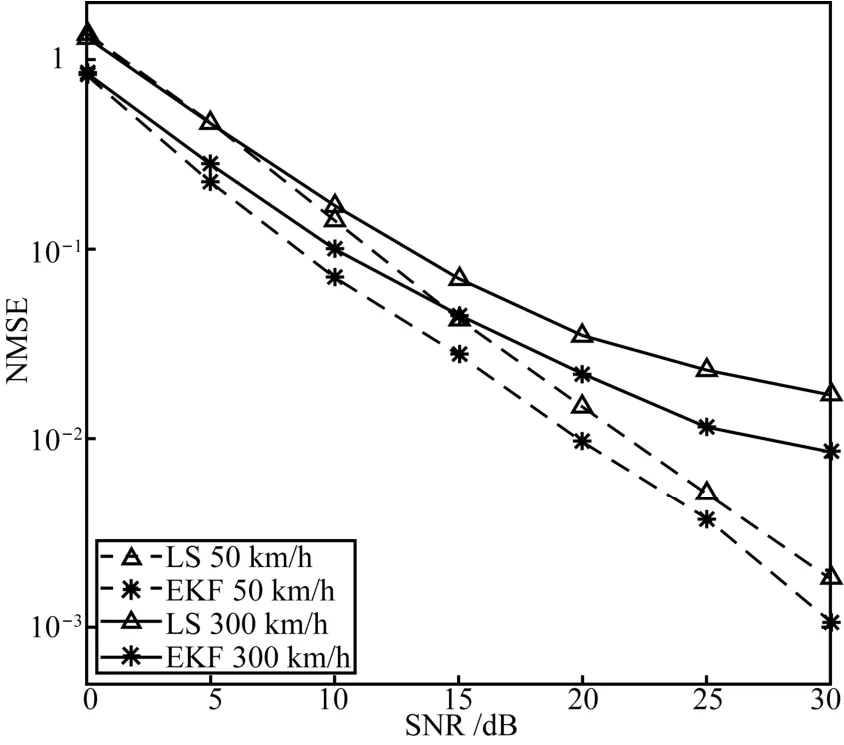
图3 LS与EKF的NMSE性能对比
由于EKF属于迭代的信道估计方法,随着迭代次数的增加,加权矩阵越来越接近实际发送符号,信道估计精度也将进一步提高。为比较信道估计精度与EKF迭代次数的关系,图4对300 km/h环境下EKF不同迭代次数的信道估计NMSE性能进行了对比分析。在高速环境下EKF方法相对于LS方法有6 dB的SNR增益,而随着EKF的迭代次数每增加2次,其NMSE又将获得1~1.5 dB的SNR增益。这是由于迭代次数的增加,加权矩阵Xi越来越接近实际发送的符号,使得EKF的估计精度随着迭代次数的增加能够不断提升。但随着迭代次数的增加,Xi的误符号率趋于收敛,此时每一次迭代带来的性能增益将十分有限。

图4 LS与不同迭代次数EKF的NMSE
误码率(bit error ratio,BER)性能是衡量信道估计方法对系统整体性能影响的宏观指标。图5对比了50 km/h和300 km/h速度下LS配合线性内插以及EKF方法的BER性能。在50 km/h时,EKF算法相对于LS算法有2~2.5 dB的性能增益,一方面虽然在50 km/h下EKF相对于LS方法的NMSE性能十分接近,但是EKF采用了迭代译码检测的结构,相对于LS方法多进行了一次迭代,因此会具有更好的系统整体性能。但在300 km/h时,受信道环境的限制,各种信道估计方法的BER性能都随着SNR的增加而趋于收敛。EKF相对于LS方法其SNR峰值增益能够达到5 dB左右,EKF体现出了更加能够适应高速环境的整体性能。其主要原因在于两个方面:在高速的环境中,由于信道的快速时变,LS配合线性插值的方法在信道估计与插值的环节性能受限较为严重,而EKF能够跟踪信道的时域相关性,故其更加适应高速环境;采用迭代接收机技术,信道估计环节可以利用信道编码的冗余提升其估计精度,抑制误差传播的现象,使得高速环境下EKF整体性能能够有明显的提升。从图5中还可以发现,在低信噪比的环境下EKF的方法相对于传统的方法性能增益有限,而高信噪比环境下EKF的方法性能增益更为明显。这是由于在高信噪比的环境下,由于受到噪声影响较小,通过软入软出的 Turbo译码器反馈的加权矩阵与相比较于低信噪比环境更加接近实际发送的符号,因此在高信噪比的环境下,EKF的方法能够在更多的符号位置进行MMSE估计,使得估计精度进一步提高。在本文高速铁路的应用场景中,其空间环境中电磁干扰较小,信噪比环境较好,因此EKF也比较符合本文的应用场景。

图5 LS与EKF的BER
表2给出了本文在仿真分析中涉及的几种信道估计方法的复杂度。可以看到LS配合线性插值的方法复杂度最低,相应其性能也最差。LMMSE方法由于涉及信道相关矩阵求逆的操作,因此复杂度较高,但由于其在数据位置采用了样条插值的方法,导致整体的信道估计性能在高速环境下表现并不理想。基于 EKF的方法的复杂度为,其中 K表示调制阶数,虽然基于EKF的方法在计算卡尔曼滤波器增益时同样涉及矩阵求逆运算,但由于需要求逆的矩阵为一对角矩阵,且I≪NS,因此基于 EKF的方法的复杂度将远远低于LMMSE方法,但其性能在高速环境下却略优于LMMSE方法。基于IDD-EKF(iterative detector & decoder extended Kalman filter)的信道估计方法的复杂度为 EKF方法的M倍,这是由迭代操作引入的。尽管如此,当迭代次数M > 5时,IDD-EKF的性能提升将非常有限,所以IM≪NS,即IDD-EKF的复杂度依然低于LMMSE方法。而IDD-EKF方法的性能在高速和低速的场景下均优于LMMSE方法,同时该方法能够根据用户的需求,通过调整迭代次数M平衡估计精度与复杂度,因此相对于本文中涉及的其他信道估计方法,IDD-EKF更加灵活。

表2 基于匹配追踪类方法的信道估计的复杂度对比
5 结束语
本文不仅将信道的时域变化过程建模为自回归过程,构造了EKF追踪信道的时域变化特性;而且采用迭代接收机的结构,有效利用了 Turbo编码中的冗余,通过多次迭代提升信道估计的准确度。最后,经过仿真对比,分析了EKF信道估计方法在高速环境下性能表现。从仿真结果可以看出,本文所提方法无论是在信道估计的精度,还是在系统的整体性能方面,相较于传统方法在高速环境中的表现均有一定的性能提升。本文的下一步工作是研究高速移动环境下多径信道的稀疏特性,结合基扩展模型对高速信道进行处理,并在此基础上设计估计精度高且复杂度低的新的信道估计算法。
[1] BI Y, ZHANG J, ZENG M, et al. Channel modeling and estima-tion for OFDM systems in high-speed trains scenarios[C]//IEEE Vehicular Technology Conference, May 15-18, 2016, Nanjing, China. New Jersey: IEEE Press, 2016: 1-6.
[2] REN X, TAO M, CHEN W. Compressed channel estimation with position-based ICI elimination for high-mobility SIMO-OFDM systems[J]. IEEE Transactions on Vehicular Technology, 2015, 6(7): 6204-6217.
[3] WANG C X, GHAZAL A, AI B, et al. Channel measurements and models for high-speed train communication systems: a survey[J]. IEEE Communications Surveys & Tutorials, 2015, 18(2): 1-13.
[4] LIANG X, ZHAO X, LI Y, et al. A non-stationary geometry-based street scattering model for vehicle-to-vehicle wideband MIMO channels[J]. Wireless Personal Communications, 2016, 90(1): 1-14.
[5] WU S, WANG C X, HAAS H, et al. A non-stationary wideband channel model for massive MIMO communication systems[J]. IEEE Transactions on Wireless Communications, 2015, 14(3): 1434-1446.
[6] GHAZAL A, WANG C X, HAAS H, et al. A non-stationary MIMO channel model for high-speed train communication systems[C]//2012 IEEE Vehicular Technology Conference, May 6-9, 2012, Yokohama, Japan. New Jersey: IEEE Press, 2012: 1-5.
[7] DAI X, ZHANG W, XU J, et al. Kalman interpolation filter for channel estimation of LTE downlink in high-mobility environments[J]. Eurasip Journal on Wireless Communications & Networking, 2012(1): 1-14.
[8] BONNET J, AUER G. Optimized iterative channel estimation for OFDM[C]//IEEE Vehicular Technology Conference, Sept 25-28, 2006, Montreal, Canada. New Jersey: IEEE Press, 2006: 1-5.
[9] SIMON E P, KHALIGHI M A. Iterative soft-Kalman channel estimation for fast time-varying MIMO-OFDM channels[J]. IEEE Wireless Communication Letters, 2013, 2(6): 599-602.
[10] HAN K Y, LEE S W, LIM J S, et al. Channel estimation for OFDM with fast fading channels by modified Kalman filter[J]. IEEE Transactions on Consumer Electronics, 2004, 50(2): 443-449.
[11] GHANDOUR-HAIDAR S, ROS L, BROSSIER J M. On the use of first-order autoregressive modeling for Rayleigh flat fading channel estimation with Kalman filter[J]. Signal Processing, 2012, 92(2): 601-606.
[12] ZARRINKOUB D H. Understanding LTE with MATLAB: from mathematical modeling to simulation and prototyping[M]. Hoboken: Wiley Publishing, 2014.
[13] 方昕, 刘云驹, 曹海燕, 等. 大规模 MIMO系统中低复杂度的稀疏信道估计[J]. 电信科学, 2016, 32(5): 89-95. FANG X, LIU Y J, CAO H Y, et al. Low-complexity sparse channel estimation for massive MIMO systems[J]. Telecommunications Science, 2016, 32(5): 89-95.
[14] 赵雄文, 高波. MIMO信道仿真模型比较及其验证[J]. 电信科学, 2016, 32(2): 75-82. ZHAO X W, GAO B. Comparisons and validations on MIMO channel simulation models[J]. Telecommunications Science, 2016, 32(2): 75-82.
MIMO iterative channel estimation based on extended Kalman filter
LI Mingfu1, LIAO Yong2, SHEN Xuanfan2
1. Science and Technology Department of Chengdu Aeronautic Vocational and Technical College, Chengdu 610100, China 2. Center of Communication and TT&C, Chongqing University, Chongqing 400044, China
In high-speed environment, fast fading and non-stationary limits the channel estimation performance, so a channel estimation method for high-speed mobility in MIMO downlink was proposed. A self-feedback extended Kalman filter (EKF) was set up to track the channel response and correlation parameters. An iterative detector & decoder receiver was adopted to deal with the problem that the observation equation is an underdetermined equation. The simulation results show that compared with least squares(LS) in high speed environment, the proposed method improves the channel estimation accuracy and performance of whole system. And it could be applied in baseband signal processing of wireless receiver in high-speed train.
multiple input multiple output, orthogonal frequency division multiplexing, high-speed mobility, non-stationary channel estimation, extended Kalman filter
s: The National Natural Science Foundation of China (No.61501066), Chongqing Research Program of Basic Research and Frontier Technology (No.cstc2015jcyjA40003), The Fundamental Research Funds for the Central Universities (No.106112017CDJXY500001), The Open Fund of Key Laboratory of Artificial Intelligence of Sichuan Province (No.2012RYJ07)
TN911
:A
10.11959/j.issn.1000-0801.2017206

李明富(1978-),男,成都航空职业技术学院科技处副教授,主要研究方向为通信技术、软件无线电等。

廖勇(1982-),男,博士,重庆大学通信与测控中心副研究员、硕士生导师,主要研究方向为高速移动通信、下一代移动通信等。

沈轩帆(1994-),男,重庆大学通信与测控中心硕士生,主要研究方向为无线通信信道估计。
2017-04-01;
:2017-06-28
国家自然科学基金资助项目(No.61501066);重庆市基础与前沿研究计划基金资助项目(No.cstc2015jcyjA40003);中央高校基本科研业务费重点基金资助项目(No.106112017CDJXY500001);人工智能四川省重点实验室开放基金资助项目(No.2012RYJ07)
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年11期)2018-12-07
北京航空航天大学学报(2017年9期)2017-12-18
中央民族大学学报(自然科学版)(2017年2期)2017-06-11
系统工程与电子技术(2016年7期)2016-08-21
电源技术(2016年9期)2016-02-27
火控雷达技术(2016年3期)2016-02-06
西北工业大学学报(2015年4期)2016-01-19
电源技术(2015年1期)2015-08-22
电测与仪表(2015年2期)2015-04-09