液电式馈能半主动悬架控制特性仿真分析与能量回收验证
2017-09-15 07:51过学迅胡三宝方志刚广州汽车集团股份有限公司汽车工程研究院广州51144武汉理工大学现代汽车零部件技术湖北省重点实验室武汉40070万向集团有限公司技术中心杭州1100
农业工程学报 2017年16期
张 晗,过学迅,胡三宝,方志刚,徐 琳,张 杰(1. 广州汽车集团股份有限公司汽车工程研究院,广州 51144;. 武汉理工大学现代汽车零部件技术湖北省重点实验室 武汉 40070;. 万向集团有限公司技术中心,杭州 1100)
液电式馈能半主动悬架控制特性仿真分析与能量回收验证
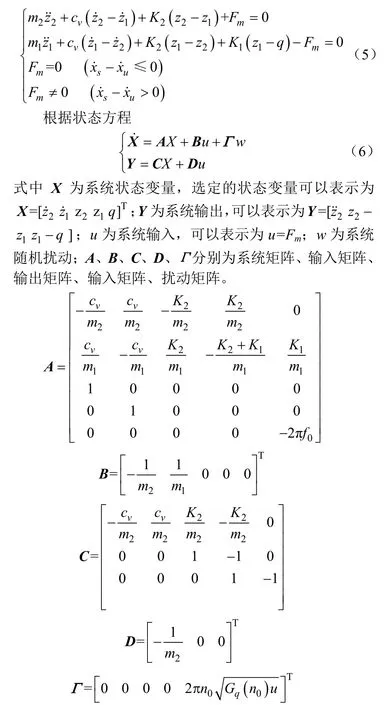
张 晗1,2,过学迅2,胡三宝2,方志刚2,徐 琳2,张 杰3
(1. 广州汽车集团股份有限公司汽车工程研究院,广州 511434;2. 武汉理工大学现代汽车零部件技术湖北省重点实验室 武汉 430070;3. 万向集团有限公司技术中心,杭州 311200)
为了回收车辆悬架系统在行驶过程中产生的振动能量,提出了一种液电式馈能半主动悬架(hydraulic-electrical energy regenerative semi-active suspension, HERSS)系统方案,并深入研究了HERSS半主动控制特性及馈能特性。根据HERSS系统原理,明确了其独特的单行程可控特点,推导了HERSS四分之一悬架系统方程,设计了线性最优LQG(linear quadratic Gaussian)控制器,利用MATLAB/Simulink搭建了基于LQG控制的HERSS仿真模型,通过仿真试验对比分析了HERSS、被动悬架、传统半主动悬架的性能差异。最后,进行了HERSS的馈能特性台架试验。研究结果表明:针对簧载质量加速度、悬架动行程、车轮动位移3个指标而言,由于HERSS仅伸张行程阻尼力可调的特点,其综合性能介于被动悬架、传统半主动悬架之间。针对馈能特性,当控制电流达到30A时,HERSS回收能量功率最高为51.94 W,对应的能量回收效率为12.86%,并且试验数据整体呈现出HERSS回收到的振动能量及能量回收效率随着控制电流的升高而增大的规律。其他悬架形式无法回收振动能量,因此,HERSS在馈能特性指标上具有明显优势。综上所述,HERSS能够满足汽车对半主动悬架系统的功能要求,并具有能量回收功能,在新能源汽车领域具有一定应用价值。该文研究成果可为液电式馈能悬架的实际应用提供参考。
汽车;悬架;控制;试验;液电式馈能;能量回收
0 引 言
悬架是汽车结构中的一个重要功能部件,其性能直接影响整车的操控性、平顺性等综合表现。目前,在车辆悬架研究领域,无论是被动悬架还是主动、半主动悬架,其作用都是衰减外界对车辆施加的激励以获得良好的乘坐舒适性。而在目前国际上倡导节能减排、生态汽车的大环境下,既可以实现车辆减振,又能够回收车辆振动能量的馈能式悬架的研究显得意义重大。
在馈能式悬架研究方面,国内外学者都曾进行过有益的探索。Okada等[1-5]提出了一种直线电机式振动能量回收系统。Yoshihiro等[6-9]提出一种无需外界提供能量的“自供能量”式电磁馈能式主动悬架系统。Zuo等[10-14]对直线电机式、齿轮齿条式馈能减振器进行了大量理论研究工作,并完成了相关台架试验及实车试验,验证了馈
能式悬架在车辆上应用的可行性。Bart等[15-19]对电磁式馈能减振器进行了深入研究,研制出实物样机搭载宝马汽车进行了实车验证。Zheng等[20-33]提出由滚珠丝杆结合永磁直流无刷力矩电机构成的主动悬架作动器方案,实现了原理样机的研制工作,通过台架试验证明了该主动馈能悬架的可行性。于长淼等[34-36]提出了由齿轮齿条机构结合直流伺服电机,并在齿轮齿条与发电机之间安装有超越离合器构成的主动悬架作动器方案,能有效解决之前的滚珠丝杆机构电机不断正反转的不足。陈士安等[37-38]研究了一种回收液压能的馈能式悬架,对该装置液压回路进行了详细分析并进行了试验验证,结合仿真计算表明此方案能够在改善车辆平顺性的同时,提高燃油经济性。
通过详细分析前人的研究成果,直线电机式、齿轮齿条式、滚珠丝杆式等几种馈能悬架均存在被动状态下压缩行程阻尼力与伸张行程阻尼力相等的特性,这一点与传统悬架系统压缩阻尼力小于伸张行程阻尼力的特性不相符。因此,当控制系统失效状况下,难以满足悬架正常工作的需求;与此同时,也增加了控制模式下的控制难度。为了满足与传统的被动悬架系统相当的功能要求,本文提出了一种车用液电式馈能悬架方案,能够在衰减车辆振动的基础之上,通过一个机电液耦合的新式减振器回收部分振动能量,用于支持其他车载电子设备的消耗,以达到节能的目的。
1 液电式馈能悬架工作原理
液电式馈能半主动悬架原理如图1所示。它的核心部件是一种液电式馈能减振器HERA(hydraulic-electrical energy regenerative absorber),该减振器的阻尼力可以通过电机进行调节。通过安装在簧上质量、簧下质量上的传感器测量出车辆在行驶过程中的状态参数,再经由控制器对车辆的振动状况进行实时判别,根据车辆的状况,对液电式馈能减振器进行控制,使之产生合适的阻尼力以提高车辆的行驶平顺性及操控性。
图1中所提及的液电式馈能减振器是液电式馈能半主动悬架的核心部件,由液压缸、单向阀、蓄能器、液压马达、电机以及液压管路等零部件组成。其系统组成与工作原理可参见文献[39]中的阐述,本文不再赘述。
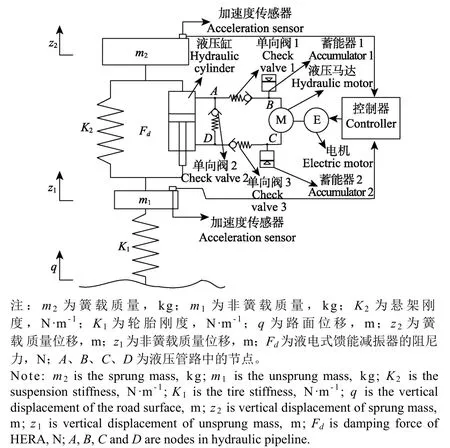
图1 液电式馈能半主动悬架原理示意图Fig.1 Schematic diagram of the hydraulic-electrical energy regenerative semi-active suspension
与传统的半主动悬架系统压缩行程与伸张行程阻尼力均可调的状态相比,图1所示的液电式馈能半主动悬架HERSS(hydraulic-electrical energy regenerative semiactive suspension)具有单行程可控性的特点,亦即仅伸张行程阻尼力是可调的,这一特点使得在对此系统进行控制时,需要分辨悬架的运动状态,只有悬架处于伸张状态时,可调阻尼力才产生作用;同时,基于这一点进行推测:在采用同一种控制方法时,液电式馈能半主动悬架的控制效果应该介于被动悬架与传统半主动悬架性能之间。
2 液电式馈能悬架动力学模型
2.1 路面模型
路面模型采用滤波白噪声法,对一均值为零的高斯白噪声经过变换得到模拟的路面位移信息[28],由式(1)所得出的B级路面位移如图2所示。

式中q˙为路面位移的导数,m/s;f0为下截止频率,Hz;n0为空间频率,m-1;Gq(n0)为参考空间频率n0下的路面功率谱密度值,也可称之为路面不平度系数;vx为车速,m/s;wt为均值为零的高斯白噪声。
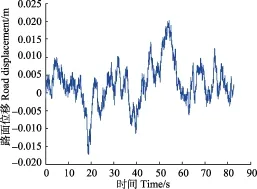
图2 B级路面激励时域曲线Fig.2 Time domain curve of grade B road excitation
2.2 液电式馈能悬架动力学模型
依据牛顿第二定律可列出HERSS的动力学方程

式中Fd为HERA提供的阻尼力,N;为簧载质量加速度,m/s2;1z˙为非簧载质量加速度,m/s2。
HERA的阻尼力Fd包含2个部分:一是由单向阀、液压管路、液压马达等引起的减振器黏性阻尼力Fv(N),这一部分阻尼力是液电式馈能减振器的固有阻尼力,无论如何控制电机,都无法改变;另一部分阻尼力则是经过控制系统对电机进行调节时产生的可变阻尼力Fm(N)。
HERA的黏性阻尼力Fv表达式可以根据HERA台架试验得出,HERA台架试验详细描述见文献[39]。对台架试验速度特性中的数据点进行多项式拟合,可以得出速度特性的多项式表达式如下

式中Fv为液电式馈能减振器阻尼力,N;v为HERA活塞速度,m/s;p1、p2、p3、p4、p5为多项式拟合系数,其数值分别为:-24 900、-20 370、5 187、7 460、253。
由于液电式馈能半主动悬架系统具有仅伸张行程可控的特点,因此,其阻尼力可以表示为如下形式

式中cv是液电式馈能减振器的黏性阻尼系数,N·s/m。
文献[39]中HERA台架试验未对电机进行控制,因此,台架试验得到的减振器速度特性,亦即式(3)可以理解为液电式馈能减振器的黏性阻尼力。由式(3)的黏性阻尼力Fv可以得到黏性阻尼系数cv。因此,液电式馈能悬架系统动力学方程又可以表示为
2.3 液电式馈能半主动悬架的LQG控制
无论何种形式的馈能悬架,都应该首先保证其能够达到与传统被动悬架相当的性能,在此基础之上考虑能量回收才具有现实意义。因此,依旧采取传统悬架评价体系中的3个指标作为液电式馈能悬架的评价标准:簧载质量加速度2z˙、悬架动行程z2-z1、车轮动位移z1-q。
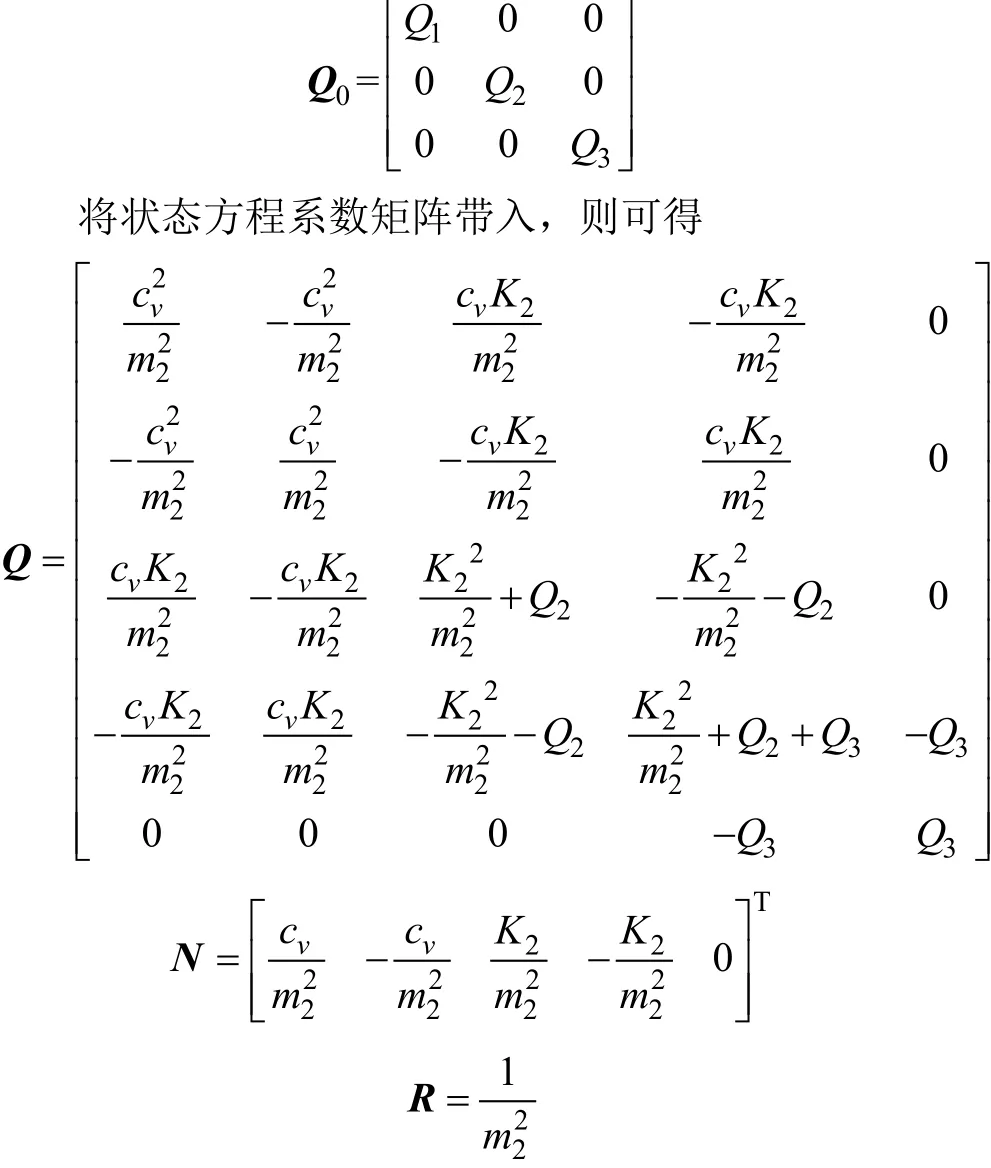
选取液电式馈能半主动悬架LQG综合评价指标J为式中Q1、Q2、Q3分别为簧载质量加速度、悬架动行程与轮胎动位移的加权系数; Q、R、N矩阵有如下表达式

根据系数矩阵A、B、Q、R、N可以利用MATLAB计算出LQG控制的反馈增益矩阵K,由此可以得出LQG最优控制力为

式中K为反馈增益矩阵;k1、k2、k3、k4、k5均为反馈增益矩阵的行向量。
2.4 LQG控制指标权重的确定
对于LQG控制的指标权重确定,通常采用经验法赋值,对控制器设计者的经验要求较高,因而不具备普适性。为了解决这一问题,许多学者对LQG指标权重系数的科学分配方法进行了研究。目前,应用较为广泛的是利用层次分析法AHP(analytic hierarchy process)进行LQG控制器指标权重的选择[40-41]。
因为悬架的3个指标数值在数量级上具有很大差别,需要对3个指标进行同尺度化处理,默认取簧载质量加速度指标的同尺度化系数为1,则悬架动行程与车轮动位移同尺度化系数有如下关系

根据AHP的定义,令hij表示指标i与指标j重要程度的比较值,则指标重要性赋值如表1所示。若两个指标之间的重要程度介于表1所示的数值之间,则可分别以2,4,6,8等取值。

表1 层次分析法指标重要程度值Table 1 Analytic hierarchy process index importance value
本文拟定以50 km/h车速C级路面行驶工况为例考察HERSS的控制效果。在此工况下,车速较低,安全隐患相对较小,而道路等级与常见路面如A级、B级路面相比较高,路面振动较大,故希望以获得较好的乘坐舒适性为主。因此,车身加速度指标的重要性高于悬架动行程与车轮动位移,同时,悬架动行程与车轮动位移指标之间重要性持平。因此。可以得到此工况下的判断矩阵
构造好判断矩阵后,进行矩阵的最大特征根与对应的特征值计算,用以确定各个指标参数的权重,并进行一致性检验。具体计算步骤为:
对判断矩阵H的每个行向量元素进行乘法运算,得到乘积向量M
式中M为对判断矩阵H的每个行向量元素进行乘法运算得到的向量;hij为指标之间的比较值。
对乘积向量开n次方根得到根向量
式中maxλ为判断矩阵的最大特征值;H为判断矩阵。
判断矩阵的一致性检验

式中CR为一致性检验指标;RI为判断矩阵的随机一致性指标。
同时,默认簧载质量加速度指标的主观加权系数为1,则悬架动行程与车轮动位移的主观加权系数可以按下式得出

式中W(1)、W(2)、W(3)分别对应权重W的第1、2、3个向量;21zzγ-为悬架动行程的主观加权系数;1zqγ-为车轮动位移的主观加权系数。
结合悬架指标的同尺度比例系数与主观加权系数,可以得到LQG控制的Q矩阵特征值如式(17)所示,同时,Q矩阵中簧载质量加速度对应的特征值同样取1。
通过以上所述AHP方法计算得出AHP的权重W= [0.714 3 0.142 9 0.142 9],结合式(8)、(16)与(17)可以得到LQG控制指标权重系数fz2-z1=7 665,fz1-q=77 876,rz2-z1=0.200 1。rz1-q=0.200 1,Q2=1 533,Q3=15 580。
由表2所示的计算值可以计算出最优控制力的系数矩阵K=[-8 650 -2 025 21 270 -38 005 10 607],用于后文算例的计算。
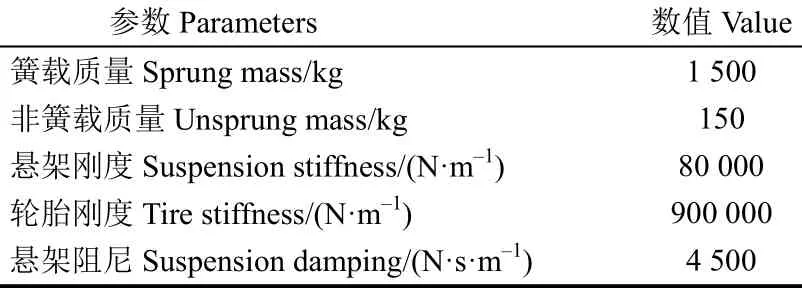
表2 车辆参数Table 2 Vehicle parameters
3 液电式馈能悬架性能仿真分析
利用第2小节推导的系统方程与LQG控制器进行仿真试验。仿真试验车辆的悬架技术参数如表2所示。被动悬架系统所用参数与表2所示一致,HERSS黏性阻尼力由式(3)确定,而LQG控制器的控制力则由式(8)给出。选定车速50 km/h下的C级路面匀速行驶工况做仿真条件,得到簧载质量加速度、悬架动行程与车轮动位移的幅频特性、时域统计值分别如图3、表3所示。
由悬架指标的幅频特性图可以看出:1)簧载质量加速度、悬架动行程、车轮动位移在车身共振频率处(图中1 Hz左右)均得到了明显的衰减,而在车轮共振频率(图中10 Hz左右)处,簧载质量加速度没有明显的改善,悬架动行程与车轮动位移2个指标反而所有恶化;2)簧载质量加速度与车轮动位移指标在低频段(车身共振频率点之前的频段)得到了明显改善,而悬架动行程在低频段表现反而有一定的恶化;3)簧载质量加速度与车轮动位移在两个共振峰之间的过渡区域频段内能够得到较明显改善,而悬架动行程在此区域没有明显改善;4)在高频段区域(车轮共振频率点之后的频段),簧载质量加速度有所改善,而悬架动行程与车轮动位移均无明显变化;5)无论在性能改善区域亦或者性能恶化区域,传统半主动悬架LQG控制的效果均显得比液电LQG控制明显:在抑制振动有效的频段内,传统半主动悬架LQG控制能够取得更好的抑制效果;但是,在导致振动加剧的频段内,液电LQG控制效果好于传统半主动悬架LQG控制。
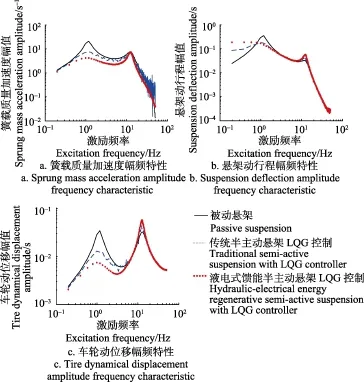
图3 三种悬架性能指标幅频特性对比Fig.3 Amplitude frequency characteristic contrast of tree type suspensions performance indexes

表3 三种悬架性能指标均方根值Table 3 Root mean square value of three type suspension performance index
由表3所示时域统计数据显示,HERSS的簧载质量加速度指标得到了明显改善,且HERSS的LQG控制效果介于被动悬架与传统半主动悬架LQG控制效果之间;对于悬架动行程指标而言,液电式馈能半主动悬架LQG与被动悬架保持一致,而传统半主动悬架LQG有少量增加;车轮动位移指标则由被动悬架、液电式馈能半主动悬架LQG控制、传统半主动悬架LQG控制的顺序增大。时域数据统计结果符合悬架3个指标的变化规律,即簧载质量加速度、悬架动行程与车轮动位移之间存在矛盾关系,提高某一性能必将带来另外某个性能的恶化。
4 液电式馈能悬架馈能特性分析
进行液电式馈能悬架的馈能特性台架试验首先需要得到路面激励数据,然后搭建二自由度悬架试验台,以道路谱为激励信号输入给试验台,测量液电式馈能悬架的相关指标参数。但是,实际的道路谱测量不仅需要复杂的仪器设备、耗费大量资金,还涉及到道路交通法律法规等问题。因此,结合客观条件,考虑采用一个等效试验方式考察液电式馈能悬架的能量回收能力。
根据文献[42]的结论,馈能式悬架更适合应用于商用车辆,因此本文以商用车为对象进行能量回收台架试验。采集商用车在特定工况行驶过程中的减振器动态位移数据,此数据能够反映减振器在实车悬架工作状态下的动作情况。将该数据作为液电式馈能减振器HERA试验台架的输入信号,进行HERA台架试验,由于激励信号为采集的实车悬架工作状态下的减振器动态位移,则HERA台架试验过程中HERA反馈出的能量回收试验数据可以等效视为HERSS的能量回收效果。
4.1 台架试验输入信号采集
为了模拟车辆悬架实际工作时的减振器运动状态,在中国汽车质量检验中心襄阳试验场进行了某商用车的道路试验,利用激光位移传感器记录下减振器上、下筒之间的动态位移,传感器布置示意如图4所示。试验工况为B级路面下70 km/h车速匀速直线行驶。
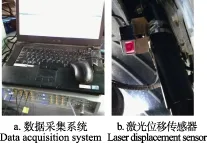
图4 商用车悬架动行程测试设备布置Fig.4 Suspension deflection testing layout of commercial vehicle
将采集到的悬架动行程数据进行极值、趋势项、均值检查,进行适当滤波处理,得到的部分数据时间历程如图5a所示。
4.2 能量回收台架试验及结果分析
以图5a所示的采集数据作为台架试验的输入信号进行HERA的能量回收台架试验。台架试验中的负载端采取定电流控制,分别调整电流为1、10、20、30 A,采集电子负载端的电流、电压数据。利用配置在HERA活塞杆上的拉压力传感器采集试验过程中的阻尼力值。利用电液伺服振动试验台记录与活塞杆刚性固定端的位移数据。得到的电流、功率时间历程如图5b、5c所示。回收能量的峰值功率较高,但是能量应该考虑有效值,故在试验数据处理时采用均方根值计算回收能量的功率。
根据台架试验进行时采集所得的HERA阻尼力与位移数据可以计算得出试验台架电液伺服作动器对减振器系统输入的能量为

式中n为采样点数;Fi为减振器活塞杆端部安装的拉压力传感器采集的力值,N;Δxi为采集所得的位移数值相邻采样点之间的间距,mm;Δt为两个相邻采集数据之间的时间间隔,s。
电子负载端的电流稳定在不同电流时时所得到的能量为Pout=UI,结合系统输入能量,可以得到液电式馈能减振器系统的能量回收效率ηtotal(%)为

根据式(19)可以计算得到不同电流时的液电式馈能减振器能量回收效率如表4所示。
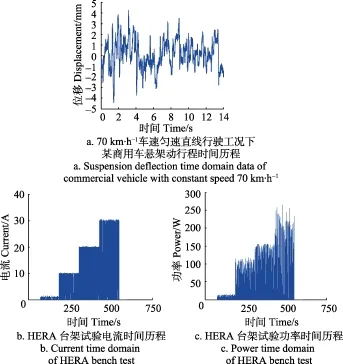
图5 能量回收HERA台架试验结果Fig.5 Energy recovery results of hydraulic-electrical energyregenerative absorber bench test
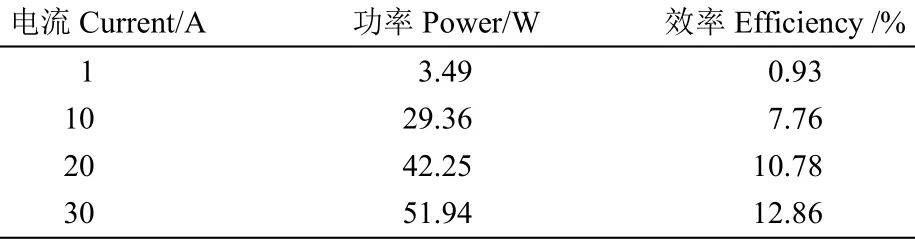
表4 HERA台架试验能量回收功率与效率Table 4 Energy recovery power and efficiency of hydraulic-electrical energy regenerative absorber bench test
由试验结果统计表4的结果可以看出:随着控制电流调整升高,回收能量值越多;随着控制电流调整升高,能量回收效率也随之提高;台架试验中由于采用了较长的液压管路,导致能量损失较大,后续工作中如对液压管路、阀系进行优化设计,可以有效提高能量回收效率,回收更多的振动能量。
5 结 论
本文提出了一种液电式馈能悬架方案,阐述了此悬架的结构组成及工作原理,明确了液电式馈能半主动悬架HERSS的单行程可控性特征,采用LQG(linear quadratic Gaussian)控制方法对HERSS (hydraulic-electrical energy regenerative semi-active suspension)性能够进行了仿真计算,验证了其单行程可控性特点,并与被动悬架、传统半主动悬架LQG控制的性能指标进行了仿真对比分析。结果表明:在类似车身共振频率处等施加控制手段可以抑制悬架指标幅值的区域,液电式馈能半主动悬架LQG控制对簧载质量加速度、悬架动行程及车轮动位移指标的控制效果优于被动悬架,却不及传统半主动悬架LQG控制效果。但是在类似车身共振频率与车轮共振频率之间的过渡频段等施加控制手段反而会使得悬架指标幅值增大的区域,液电式馈能半主动悬架LQG控制对簧载质量加速度、悬架动行程及车轮动位移指标的控制效果虽然不及被动悬架,却优于传统半主动悬架LQG控制效果。
本文开展了等效的HERSS能量回收台架试验,分析了HERSS的能量回收特性。研究结果表明:HERSS的能量回收具备可行性,当控制电流达到30 A时,HERSS回收能量功率最高为51.94 W,对应的能量回收效率为12.86%,且台架试验数据整体呈现出HERSS回收到的振动能量及能量回收效率随着控制电流的升高而增大的规律。
综上所述,HERSS不仅具备优于被动悬架的性能表现,还具备能量回收功能。因此,在新能源车型上,将会具有一定的应用前景。
[1] Okada Y, Harada H. Active and regenerative control of electrodynamic vibration damper[C]//Proceedings of the 1995 ASME Design Engineering Technical, 1995: 595-602.
[2] Okada Y, Harada H, Suzuki K. Active and regenerative control of an electro dynamic-type suspension[J]. JSME International Journal, Series C, 1997, 40(2): 272-278.
[3] Kim S, Okada Y. Variable resistance type energy regenerative damper using pulse width modulated step-up chopper[J]. Journal of Vibration and Acoustics, 2002, 124(1): 110-115.
[4] Okada Y, Kim S, Ozawa K. Energy regenerative and active control suspension[C]//2003 ASME Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Chicago, 2003: 2135-2142.
[5] Okada Y, Ozawa K. Energy regenerative and active control of electro-dynamic vibration damper [C]//IUTAM Symposium on Vibration Control of Nonlinear Mechanisms and Structures, Munich, 2005: 233-242.
[6] Yoshihiro Suda, Shigeyuki Nakadai, Kimihiko Nakano. Study on active control using regenerated vibration energy[J]. Transactions of the Japan Society of Mechanical Engineers, Part C, 1996, 63(613): 3038-3044.
[7] Yoshihiro Suda, Taichi Shiiba. A new hybrid suspension system with active control and energy regeneration[J]. Vehicle System Dynamics, 1996, 25(1): 641-654.
[8] Yoshihiro Suda, Shigeyuki Nakadai, Kimihiko Nakano. Hybrid suspension system with skyhook control and energy regeneration[J]. Vehicle System Dynamics, 1998, 28(Supp.): 619-634.
[9] Yoshihiro Suda, Shigeyuki Nakadai, Kimihiko Nakano. Study on the self-powered active vibration control[J]. Transactions of the Japan Society of Mechanical Engineers, 1998, 64(628): 4770-4776.
[10] Zuo Lei, Brian Scully, Jurgen Shestani, et al. Design and characterization of an electromagnetic energy harvester for vehicle suspensions[J]. Smart Material and Structure, 2010, 19(4): 045003.
[11] Zuo Lei, Chen Xiaoming, Nayfeh Samir. Design and analysis of a new type of electromagnetic damper with increased energy density[J]. Journal of Vibration and Acoustics, 2011, 133(4): 041006.
[12] Li Zhongjie, Zuo Lei, Kuang Jian, et al. Energy harvesting shock absorber with a mechanical motion rectifier[J]. Smart Materials and Structures, 2013, 22(2): 025008.
[13] Li Zhongjie, Zachary Brindak, Zuo Lei. Modeling of an electromagnetic vibration energy harvester with motionmagnification[C]//Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Denver, 2012: 285-293.
[14] Li Zhongjie, Zuo Lei, Luhrs, et al. Electromagnetic energy harvesting shock absorbers: Design, modeling, and road tests[J]. IEEE Transaction on Vehicular Technology, 2013, 62(3): 1065-1074.
[15] Bart L J G, Jeroen L G J, Johannes J H P, et al. Design aspects for an active electromagnetic suspension system for automotive applications[C]//2008 IEEE Industry Applications Society Annual Meeting, IAS'08, Edmonton, 2008: 4658969.
[16] Bart L J G, Johannes J H P, Jeroen L G J. Janssen. Active electromagnetic suspension system for improved vehicle dynamics[C]//2008 IEEE Vehicle Power and Propulsion Conference, Harbin, 2008:4677555.
[17] Bart L J G, Johannes J H P, Jeroen L G J, et al. Design aspects of an active electromagnetic suspension system for automotive applications[J]. IEEE Transactions on Industry Applications, 2009, 45(5): 1589-1597.
[18] Bart L J G, Johannes J H P, Jeroen L G J, et al. Active electromagnetic suspension system for improved vehicle dynamics[J]. IEEE Transactions on Vehicular Technology, 2010, 59(3): 1156-1163.
[19] Bart L J G, Johannes J H P,, Jeroen L G J et al. Efficiency of a regenerative direct-drive electromagnetic active suspension[J]. IEEE Transactions on Vehicular Technology, 2011, 60(4): 1384-1392.
[20] Zheng Xuechun, Yu Fan. Study on the potential benefits of an energy-regenerative active suspension for vehicles[C]// 2005 SAE Commercial Vehicle Engineering Congress and Exhibition, Chicago, 2005: 2005013564.
[21] Zhang Yongchao, Yu Fan, Huang Kun. Permanent- magnet DC motor actuators application in automotive regenerative active Suspensions[C]//2009 SAE International Congress and Exposition, 2009: 2009010227.
[22] Zheng Xuechun, Yu Fan, Zhang Yongchao. A novel energyregenerative active suspension for vehicles[J]. Journal of Shanghai Jiao Tong University, 2008, 13(2): 184-188.
[23] Zhang Yongchao, Huang Kun, Yu Fan, et al. Experimental verification of energy-regenerative feasibility for an automotive electrical suspension system[C]//2007 IEEE International Conference on Vehicular Electronics and Safety, Beijing, 2007: 9872932.
[24] 郑雪春. 馈能式汽车电动主动悬架的理论及试验研究[D].上海:上海交通大学,2007. Zheng Xuechun. Theoretical and Experimental Study of Automobile Electrical Energy-regenerative Active Suspension[D]. Shanghai: Shanghai Jiao Tong University, 2007. (in Chinese with English abstract)
[25] 喻凡,张勇超. 馈能型车辆主动悬架技术[J]. 农业机械学报,2010,41(1):1-6. Yu Fan, Zhang Yongchao. Technology of regenerative vehicle active suspensions[J]. Transactions of The Chinese Society for Agricultural, 2010, 41(1): 1-5. (in Chinese with English abstract)
[26] 张勇超,郑雪春,喻凡,等. 馈能式电动悬架的原理与试验研究[J]. 汽车工程,2008,30(1):48-52. Zhang Yongchao, Zheng Xuechun, Yu Fan, et al. Theoretical and experimental study on electrical energy-regenerative suspension[J]. Automotive Engineering, 2008, 30(1): 48-52. (in Chinese with English abstract)
[27] 张勇超,喻凡,顾永辉,等. 汽车电动悬架的减振与馈能特性试验验证[J]. 上海交通大学学报,2008,42(6):874-877. Zhang Yongchao, Yu Fan, Gu Yonghui, et al. Isolation and energy-regenerative performance experimental verification of automotive electrical suspension[J]. Journal of Shanghai Jiao Tong University, 2008. 42(6):874-877. (in Chinese with English abstract)
[28] 黄昆,张勇超,喻凡,等. 电动式主动馈能悬架综合性能的协调性优化[J]. 上海交通大学学报,2009,43(2):226-230. Huang Kun, Zhang Yongchao, Yu Fan, et al. Coordinate optimization for synthetical performance of electrical energyregenerative active suspension[J]. Journal of Shanghai Jiao Tong University, 2009, 43(2): 226-230. (in Chinese with English abstract)
[29] 顾永辉,喻凡,张勇超,等. 汽车馈能式电动主动悬架控制器设计与试验研究[J]. 汽车技术, 2007(11):40-44. Gu Yonghui, Yu Fan, Zhang Yongchao, et al. Controller design and experimental study of electrical energyregenerative suspension[J]. Automobile Technology, 2007(11): 40-44. (in Chinese with English abstract)
[30] 黄昆,喻凡,张勇超. 基于能量流动分析的电磁式馈能型主动悬架控制[J]. 上海交通大学学报,2011,45(7):1068-1073. Huang Kun, Yu Fan, Zhang Yongchao. Active control of energy-regenerative electromagnetic suspension based on energy flow analysis[J]. Journal of Shanghai Jiao Tong University, 2011, 45(7): 1068-1073. (in Chinese with English abstract)
[31] 黄昆,喻凡,张勇超. 电磁式主动悬架模型预测控制器设计[J]. 上海交通大学学报,2010,44(11):1619-1624. Huang Kun, Yu Fan, Zhang Yongchao. Mdel predictive controller design for electromagnetic active suspension[J]. Journal of Shanghai Jiao Tong University, 2010, 44(11):1619-1624. (in Chinese with English abstract)
[32] 曹民,刘为,喻凡. 车辆主动悬架用电机作动器的研制[J].机械工程学报,2008,44(11):224-228. Cao Min, Liu Wei, Yu Fan. Development on electromotor actuator for active suspension of vehicle[J]. Chinese Journal of Mechanical Engineering. 2008, 44(11): 224-228. (in Chinese with English abstract)
[33] Huang K, Yu F, Zhang Y. Active controller design for an electromagnetic energy-regenerative suspension[J]. International Journal of Automotive Technology, 2011, 12(6): 877-885.
[34] 于长淼,王伟华,王庆年. 馈能悬架阻尼特性及其影响因素[J]. 吉林大学学报:工学版,2010,40(6):1482-1486. Yu Changmiao, Wang Weihua, Wang Qingnian. Damping characteristic and its influence factors in energy regenerative suspension[J]. Journal of Jilin University:Engineering and Technology Edition, 2010, 40(6):1482-1486. (in Chinese with English abstract)
[35] 于长淼,王伟华,王庆年. 电磁馈能式悬架方案设计与节能分析[J]. 汽车技术,2010(2):21-24. Yu Changmiao, Wang Weihua, Wang Qingnian. Design of electromagnetic energy regenerative suspension system and analysis of energy conservation[J]. Automobile Technology, 2010(2): 21-24. (in Chinese with English abstract)
[36] 刘松山,王庆年,王伟华,等. 惯性质量对馈能悬架阻尼特性和幅频特性的影响[J]. 吉林大学学报:工学版,2013,43(3):557-563. Liu Songshan, Wang Qingnian, Wang Weihua, et al. Influence of inertial mass on damping and amplitudefrequency characteristic of regenerative suspension[J]. Journal of Jilin University: Engineering and Technology Edition, 2013, 43(3):557-563. (in Chinese with English abstract)
[37] 陈士安,何仁,陆森林. 馈能型悬架的仿真与性能评价研究[J]. 汽车工程,2006,28(2):167-171. Chen Shian, He Ren, Lu Senlin. A study on the simulation of energy reclaiming suspension and performance evaluation[J]. Automotive Technology, 2006, 28(2): 167-171. (in Chinese with English abstract)
[38] 陈士安,何仁,陆森林. 新型馈能型悬架及其工作原理[J].机械工程学报,2007,43(11):177-182. Chen Shian, He Ren, Lu Senlin. New reclaiming energy suspension and its working principle[J]. Chinese Journal of Mechanical Engineering, 2007, 43(11): 177-182. (in Chinese with English abstract)
[39] 张晗,过学迅,徐琳,等. 液电式馈能减振器外特性仿真与试验[J]. 农业工程学报,2014,30(2):38-46. Zhang Han, Guo Xuexun, Xu Lin, et al. Simulation and test for hydraulic electromagnetic energy-regenerative shock absorber[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(2): 38-46. (in Chinese with English abstract)
[40] 陈士安,邱峰,何仁,等. 一种确定车辆悬架LQG控制加权系数的方法[J]. 振动与冲击,2008,27(2):65-68. Chen Shian, Qiu Feng, He Ren, et al. A method for choosing weights in a suspension LQG control[J]. Journal of vibration and shock, 2008, 27(2):65-68. (in Chinese with English abstract)
[41] 罗鑫源,杨世文. 基于AHP的车辆主动悬架LQG控制器设计[J]. 振动与冲击,2013,32(2):102-106. Luo Xinyuan, Yang Shiwen. LQG controller design of vehicle active suspension based on AHP method[J]. Journal of vibration and shock, 2013, 32(2):102-106. (in Chinese with English abstract)
[42] 张晗,过学迅,方志刚,等. 馈能式悬架能量回收潜力试验研究[J]. 振动、测试与诊断,2015,35(2):225-230. Zhang Han, Guo Xuexun, Fang Zhigang, et al. Potential energy harvesting analysis and test on energy-regenerative suspension system[J]. Journal of Vibration, Measurement and Diagnosis, 2015, 35(2): 225-230. (in Chinese with English abstract)
Simulation analysis on hydraulic-electrical energy regenerative semi-active suspension control characteristic and energy recovery validation test
Zhang Han1,2, Guo Xuexun2, Hu Sanbao2, Fang Zhigang2, Xu Lin2, Zhang Jie3
(1. Guangzhou Automobile Group Co., Ltd. Automotive Engineering Institute, Guangzhou 511434, China; 2. Hubei Key Laboratory of Advanced Technology of Automotive Parts, Wuhan University of Technology, Wuhan 430070, China; 3. Tech. Center, Wanxiang Group, Hangzhou 311200, China)
To recycle the vibration energy of vehicles over rough roads, a vehicular hydraulic-electrical energy regenerative semi-active suspension (HERSS) was designed in this work. Simulations and bench tests were performed with focus on its suspension performance and energy harvesting characteristic, respectively. The key component in the HERSS was the hydraulic-electrical energy regenerative absorber (HERA), and the HERA was composed of a hydraulic cylinder, three check valves, two accumulators, a hydraulic motor, a generator, and hydraulic lines. Firstly, on the basis of the HERSS principle, the system configuration and working principle were described. The test bench was constructed according to the HERA theory, and the speed characteristic curve of HERA was obtained through bench test. Secondly, the two degrees of freedom HERSS dynamic model was constructed. From the model equation, damping force of HERSS contained viscous damping force and motor control force. The viscous force was the inherent damping characteristic of HERSS caused by throttle resistance of check valves, frictional resistance of pipe lines, throttle resistance of hydraulic motor. The motor control force can be adjusted according to the control strategy. According to the HERSS principle, the motor control force can be adjusted in the extension stroke only and as such, the control strategy can be used to identify suspension motion state. When the suspension in the compression stroke, the motor control force could not affect the HERSS, but in the extension stroke, the motor control force was variable according to the control strategy. In order to evaluate the HERSS performance, sprung mass acceleration, suspension deflection and tire dynamical displacement were chosen as assessing index. Then, the Linear Quadratic Gaussian (LQG) controller was designed for HERSS. In the processing of LQG design, the weighting coefficient of HERSS performance index was determined by Analytic Hierarchy Process (AHP). Thirdly, the performance of HERSS with LQG control was compared with passive suspension (PS), traditional semi-active suspension (TSS) with LQG control through simulation tests. The frequency results indicated that: (i) in the resonance frequency of sprung mass, the amplitude of suspension index parameters ranked in a descend order, PS, HERSS and TSS. The results reflected that LQG strategy could reduce the sprung mass vibration effectively. And because HERSS could not change its damping force during compression stroke, its effect of vibration elimination was better than the PS, but worse than the TSS; (ii) in the resonance frequency of unsprung mass, the amplitudes of sprung mass acceleration calculated by three models were similar. The amplitudes of suspension deflection were too small to display as frequency of peak. And the amplitudes of tire dynamical displacement ranked in a descend order, PS, HERSS, TSS. In general, in the resonance frequency of unsprung mass, the differences of amplitude of suspension index parameters were very small; (iii) in the transition frequency band, which was between the resonance frequency of sprung mass and the resonance frequency of unsprung mass, the amplitudes of sprung mass acceleration and tire dynamical displacement ranked in a descend order, TSS, HERSS, PS. The differences of amplitudes of suspension deflection were small. Lastly, the absorber dynamical displacement data was collected through road test. The acquisition data used in energy harvesting bench test as input signal. The bench test results showed that the HERSS was feasible, and the harvested energy power and energy harvesting efficiency of HERA were increasing with the rise of the control current.
vehicles; suspension; control; experiment; hydraulic-electrical energy regenerative system; energy harvesting
10.11975/j.issn.1002-6819.2017.16.009
U463.33
A
1002-6819(2017)-16-0064-08
张 晗,过学迅,胡三宝,方志刚,徐 琳,张 杰. 液电式馈能半主动悬架控制特性仿真分析与能量回收验证[J]. 农业工程学报,2017,33(16):64-71.
10.11975/j.issn.1002-6819.2017.16.009 http://www.tcsae.org
Zhang Han, Guo Xuexun, Hu Sanbao, Fang Zhigang, Xu Lin, Simulation analysis on hydraulic-electrical energy regenerative semi-active suspension control characteristic and energy recovery validation test[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(16): 64-71. (in Chinese with English abstract)
doi:10.11975/j.issn.1002-6819.2017.16.009 http://www.tcsae.org
2017-02-06
2017-06-15
国家自然科学基金资助项目(51075312)
张 晗,男,湖北荆门人,博士,主要从事汽车悬架设计、汽车动力学及控制的研究。广州 广州汽车集团股份有限公司汽车工程研究院,511434。Email:zh1985@163.com
※通信作者:过学迅,男,江苏无锡人,教授,博士,博士生导师,主要从事汽车动力学及控制、汽车底盘设计的研究。武汉 武汉理工大学现代汽车零部件技术湖北省重点实验室,430070。Email:guo6531@163.com
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
军民两用技术与产品(2021年1期)2021-07-28
装备制造技术(2020年11期)2021-01-26
北京理工大学学报(2020年11期)2020-12-15
铁道通信信号(2020年6期)2020-09-21
振动、测试与诊断(2017年5期)2017-11-07
汽车工程学报(2015年6期)2016-03-23
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
汽车科技(2014年6期)2014-03-11
振动、测试与诊断(2014年6期)2014-03-01