
新型四余度功率电传推力矢量控制技术①
2017-09-15 09:14:47朱康武纪宝亮傅俊勇
固体火箭技术 2017年4期
朱康武,房 成,纪宝亮,傅俊勇
(上海航天控制技术研究所,上海 201109)
新型四余度功率电传推力矢量控制技术①
朱康武,房 成,纪宝亮,傅俊勇
(上海航天控制技术研究所,上海 201109)
通过对现有不同类型功率电传(PBW—Power by wire)系统进行分析,根据航天运载器使用特点,提出了理想PBW系统的概念,并基于负载敏感原理提出了新型PBW系统方案。在此基础上,针对载人航天等高可靠性应用场合,提出了四余度PBW系统方案。通过仿真研究证明所提出的新型PBW系统具有比传统PBW系统更好的综合性能,是最接近于理想PBW系统的设计方案。通过对四余度PBW系统在故障情况下的工作情况进行仿真研究表明,四余度PBW系统具有两次故障工作、三次故障安全的余度等级。文中所提出的系统方案在未来大推力固体火箭发动机和氢氧发动机推力矢量控制系统中具有广泛的应用前景。
功率电传;推力矢量控制;伺服系统;运载火箭
0 引言
推力矢量控制系统(TVC—Thrust vector control)是运载火箭控制系统的执行机构。它通过摇摆发动机喷管产生控制力矩,实现运载火箭的姿态和方向控制。为了实现火箭的高精度控制,要求TVC系统具有较好的控制精度和动态响应性能。电液伺服系统由于具有比电动伺服系统更好的稳态精度、频响性能和控制刚度。因此,电液伺服系统被广泛应用于运载火箭TVC系统中。目前,对于输出功率大于5 kW的电液 TVC系统,其能源通常来自于火箭发动机、燃气发生器或压缩气体等。对于运载火箭三级或上面级使用的输出功率小于5 kW的电液 TVC 系统,则通常使用电池为动力[1]。
功率电传(PBW-Power by wire)伺服系统由电池提供能源,无需另外配置复杂的液压或机械能源系统,因而具有结构紧凑、布置方便、功率密度大等优点,是未来航空航天伺服系统的主要发展方向之一。随着电池技术的快速发展,电池的能量密度快速提高,已经可满足较大功率电液 TVC系统的要求。与常规动力方式相比,电池系统更加简单、便宜、易于维护并具有更高的可靠性。对于一些正在研发的新型运载火箭,正在研究使用电池作为电液TVC系统的能源[2]。为了将使用电池为动力的电液TVC系统与传统的由其他方式提供能量的电液TVC系统相区别,定义前者为PBW-TVC系统。
对于固体助推器和固体运载火箭,目前主流TVC方案是以电池作为能源,以大功率电动伺服系统控制柔性喷管摇摆[3-4]。目前电动伺服系统大多使用直流无刷电机和交流永磁伺服电机,在功率密度方面远远高于传统直流电机,且具有效率高、结构简单、使用维护方便等优点[5-6]。但电液伺服系统的稳态控制精度、频响性能和功率/质量比均大大优于电动伺服系统。同时,由于电动伺服系统中的传动系统,如滚珠丝杠和减速器等存在卡死的可能,其失效可能造成致命影响,而电液伺服系统则不存在这种可能。传统电液伺服系统的主要问题是制造难度大、油液可能泄露、使用维护较麻烦、系统效率低。但随着近几年电池和液压技术的发展,通过有针对性地改进其缺点,充分挖掘其技术优势和潜力,则新型功率电传伺服技术仍将占有其一席之地。
对于PBW系统,由外界向系统提供能源的传统高压油管被电缆所代替,且可取消复杂的外部液压能源系统[7-8]。因此,PBW-TVC系统结构更加紧凑、布置更加方便,且比传统电液 TVC系统具有更高可靠性。目前,国内外提出了多种基于不同工作原理的PBW系统,但都存在着比较明显的缺点或不足。例如,泵控PBW系统的控制性能很差;阀控PBW系统的效率很低;而复合形PBW系统由于太复杂而变得非常不可靠[9-10]。
针对以上问题,本文将首先提出理想功率电传系统的概念。在此基础上,提出了一种新型PBW系统结构,并对其进行研究。最后提出了一种四余度高可靠性PBW系统,并通过仿真研究证明所提出新型PBW系统的有效性。
1 新型功率电传推力矢量控制系统
1.1 典型电液功率电传推力矢量控制系统分析
首先对2种典型PBW-TVC系统的优缺点进行对比研究。典型PBW-TVC系统分为阀控系统和泵控系统两类,阀控系统的工作原理见图1,它由电池、逆变器、中频电机、恒压变量泵、高频响电液喷嘴挡板伺服阀、液压作动器、位置传感器和控制器几部分组成。系统中,电池、电机、泵和蓄能器组成了能源子系统提供高压油。伺服阀、液压作动器、位置传感器和控制器组成了位置反馈控制子系统。
对于运载火箭,希望TVC系统的质量尽可能轻,即尽量提高系统效率以减轻电池、电机和泵的质量。因此,液压系统效率是衡量TVC系统性能的重要指标。阀控系统的液压效率为

(1)
式中ηh为系统液压效率;ps为泵的输出压力;pL为负载压力;qL为负载流量;qp为泵输出流量。
负载压力为

(2)
式中FL为折算在作动器上的负载力;Ap为作动器活塞有效面积。
由图1可知,阀控系统为恒压变量系统。在不同工况下,系统输出压力均能稳定在设定值附近。而由压力控制阀和调节机构控制泵斜盘角度改变输出流量适应负载对流量的需要。由于系统中没有溢流损失,可近似得到:
qp=qL+Δq
(3)
式中Δq为泄漏流量。
将式(2)、式(3)代入式(1),有
(4)
由式(4)很容易发现经典阀控系统的效率与负载力有关。因此,在小负载情况下,系统效率将非常低。在大多数PBW系统中,油箱容积都比较小,则低效率将会导致剧烈温升,并造成系统故障。因此,经典阀控PBW-TVC系统仅用于短时、小功率场合。
虽然阀控PBW系统具有非常好的频响性能,但对油液污染非常敏感,效率低。为了解决这些问题,提出了泵控PBW-TVC系统,见图2。在泵控系统中,使用伺服电机和双向定量泵,通过控制电机转速和方向调节进行液压作动器的流量。
在泵控系统中,由于没有溢流损失,因此式(3)仍然成立。同时,在系统中也不存在节流损失(在阀控系统中,节流损失主要来自于伺服阀),则有
ps=pL
(5)
将式(3)、式(5)代入式(1),系统效率为
(6)
由式(6)可知,泵控系统的液压效率几乎与工况无关。通常,泄漏量Δq小于5%泵额定流量。因此泵控系统的理论效率可达95%,远远高于阀控系统。
在泵控系统中没有小直径节流孔和流道,具有很好的抗污染能力。因而泵控系统的可靠性优于阀控系统。
由于具有高效率和高可靠性的优点,在最近20年里,泵控PBW系统已经被成功地应用于F-18、F-35等先进战斗机的飞控系统中[11]。但是系统的频响性能、稳定性和低速控制性能均低于阀控系统。泵控PBW系统控制带宽很难超过5 Hz[12]。较差的控制性能大大限制了泵控PBW系统的应用范围。
1.2 理想功率电传推力矢量控制系统定义
由以上研究分析可知,目前应用的或提出的PBW系统均有着明显的限制性。在设计更为优化的PBW 系统前,有必要首先对理想PBW-TVC系统进行定义。
对于运载火箭PBW-TVC系统来说,评价系统性能好坏的3项最重要性能指标分别为:控制性能、效率和可靠性。在大多数情况下,这3项性能指标是互相矛盾的,能同时满足这3项指标的系统也是不存在的。
因此,理想的应当是一个能够在性能、效率和可靠性3项指标中达到最佳均衡的系统。用更简单的语言描述为:理想的PBW-TVC系统必须是一个结构简单系统,并应用新的设计原理实现控制性能和效率两者之间的最佳折衷。
1.3 基于负载敏感原理的理想功率电传推力矢量控制系统
阀控PBW系统性能远优于泵控PBW系统,但它的主要问题是效率低和可靠性低。对于效率低的问题,由式(1)、式(4)可知,由于阀控系统压力是恒定的,因此损失在伺服阀节流口上的节流损失是其低效率的根本原因。如果系统压力可随着负载变化而改变,保证伺服阀上压降为恒定的小值,则可从根本上减少节流损失,进而大大提高系统效率。
基于以上分析,引入一种新的被称为“负载敏感”的液压控制原理,从而实现系统压力随负载自适应变化的功能。
负载敏感的工作原理是通过调节变量泵的排量机构,保证系统压力ps始终比负载压力pL高Δp[13]。则系统压力为
ps=pL+Δp
(7)
式中Δp为设定的伺服阀两端压力降,通常为0.5~2 MPa。
系统液压效率为
(8)
将式(8)与式(4)进行比较可发现,新的基于负载敏感原理的PBW系统效率远远高于阀控系统,特别是当负载压力较小时。
图3为新型PBW-TVC系统工作原理图。该系统的基本结构与阀控系统比较接近,主要差别在于使用了新的负载敏感泵替代了恒压变量泵。通过调节负载敏感泵中压力控制阀的预压缩量设定Δp的值。使用梭阀敏感负载压力,并将压力值传递至压力控制阀。当输出压力ps小于pL、Δp之和时,压力控制阀将控制泵中的作动器以增加泵的排量和输出流量,从而增加输出压力,反之亦然。
对于阀控系统可靠性低的问题,在新系统中引入了新型直驱式伺服阀(Direct Drive Valve—DDV)替代传统对油液污染非常敏感的喷嘴挡板式伺服阀。DDV阀中没有小直径的喷嘴和流道,由推力比较大的线性力马达驱动,因而阀芯的剪切力切大,可切断一些较小的杂质和碎削。因此,DDV阀具有非常好的抗污染能力和本质可靠性,从而新型PBW系统比传统阀抗系统具有更高的可靠性[14]。
新的PBW系统可被认为是一种改进的阀控PBW系统。因而该系统具有比泵控PBW系统更好的控制性能,且与经典具有非线性特性的阀控系统相比,新的PBW系统具有线性的控制特性。伺服阀的流量方程为

(9)
式中Cd为阀的流量系数;W阀口面积梯度;xv为阀芯开口位移;ρ为油液密度。
对于常规阀控系统式(9)中的压差Δp由负载决定,阀的流量特性为非线性。而对于负载敏感系统,由于Δp为近似常值,所以其输入位移与输出流量之间为线性关系,更加容易控制。
由上述分析可知,所提出的新型PBW系统与其他现有PBW系统方案具有更加均衡的性能,是与理想PBW系统概念最为接近的系统。
2 四余度功率电传推力矢量控制系统
2.1 系统结构及工作原理
在下一代运载火箭中,对TVC系统的可靠性指标从目前的0.999 9增加至0.999 99,传统的不使用余度技术的TVC系统将无法满足日益苛刻的可靠性指标要求。
对于并联冗余系统,其可靠性为[15]
(10)
式中Ri(t)为单通道的可靠性;Rs(t)为整个冗余系统的可靠性。
假设单余度系统的可靠性为0.9,则四余度冗余系统的可靠性可达0.999 9。对于载人运载火箭,使用三余度甚至四余度TVC系统是必须的[16]。针对下一代运载火箭,特别是使用固体火箭发动机和氢氧发动机的应用场合,基于上面提出的新型PBW系统设计原理,提出了一种新型四余度PBW-TVC系统。
系统由4个独立的液压和电气通道组成,以实现二次故障/工作、三次故障/安全的能力,见图4。图5为系统液压原理图。由4个液压通道使用流量综合的方式共同驱动1个液压作动器。4个梭阀用于敏感负载压力并独立传递至每个通道。各液压通道都由1台独立的负载敏感泵、油箱和中频电机组成独立的油源子系统。因此,无论是液压通道还是电气通道出现1次或多次故障均不会导致整个系统的失效。
1-液压作动器;2-位置传感器;3-溢流阀;4-梭阀;5-直驱式伺服阀;6-过滤器;7-单向阀;8-安全阀;9-负载敏感泵;10-压力控制阀;11-中频电机;12-变量泵;13-调节机构;14-增压油箱。
2.2 故障检测及余度管理方法
设计了余度管理系统,以保证能够快速发现故障,并对故障进行隔离,以确保故障不会影响正常通道,并使用余度管理方法对系统进行重构,保证系统性能下降最小。
3 系统建模及仿真结果
3.1 系统建模
为了验证所提出新型PBW系统的有效性,使用Amesim®建立了经典阀控系统、泵控系统和新型PBW系统的仿真模型。同时,建立了四余度PBW系统的仿真模型以评估故障状态下余度系统性能。仿真模型中使用的参数见表1。
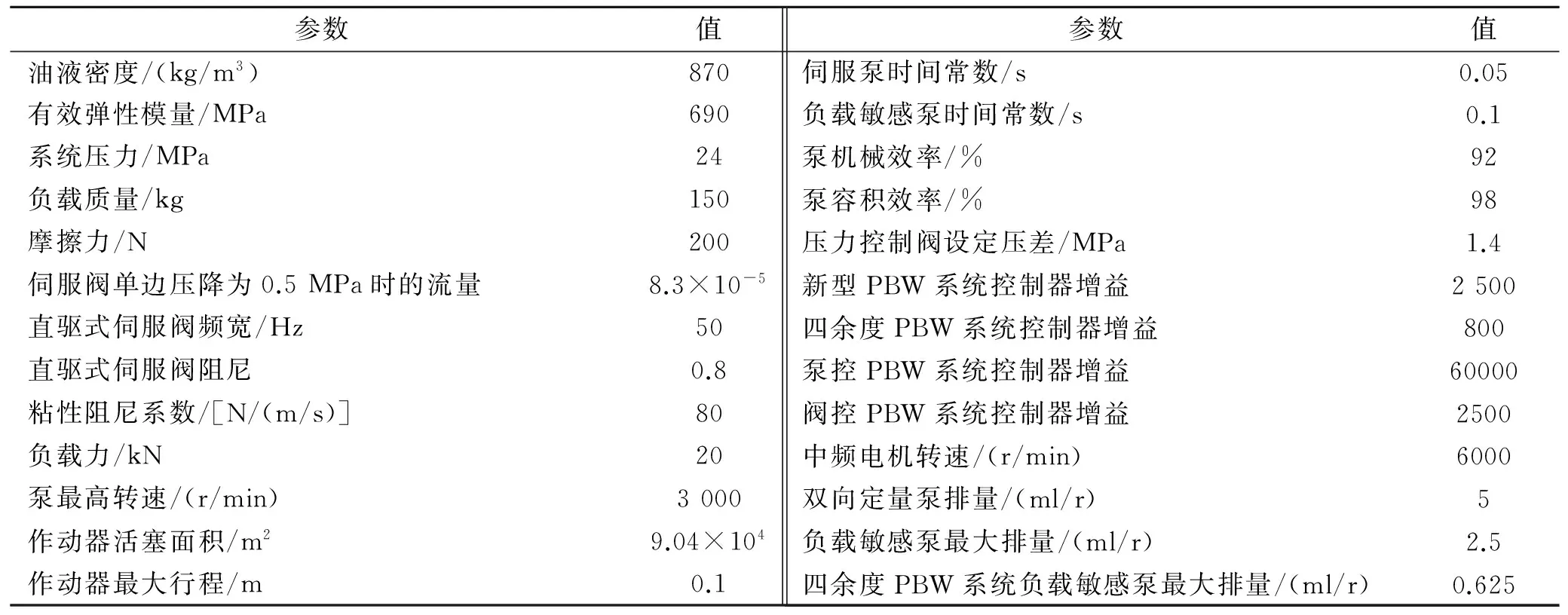
表1 仿真模型参数
3.2 3种功率电传系统对比仿真结果
设计了由方波和正弦波组成的时长为90 s的测试信号,对3种PBW系统的控制性能和效率进行测试。方波信号频率为0.2 Hz和0.5 Hz,幅值分别为±0.05 m和±0.03 m。正弦信号频率为0.5、2、5 Hz,幅值分别为±0.04、±0.02、±0.02 m。
由图6的跟踪对比结果很容易发现,泵控PBW系统的性能最差,控制刚度底、稳态误差较大。新型PBW系统的控制性能比阀控PBW系统略差,但远远优于泵控PBW系统。
图7给出了3种PBW系统的能量消耗。仿真结果与理论分析结果相吻合。泵控PBW系统的效率最高,而新型PBW系统的效率明显高于阀控PBW系统。
对3种PBW系统进行扫频仿真测试,正弦信号的幅值为±20% 全行程,扫频范围为0.1~20 Hz。仿真结果见图8。仿真结果表明新型PBW系统的频响控制性能远远优于泵控PBW系统,而与阀控PBW系统非常接近。
图9为新型PBW系统的系统输出压力对负载压力的跟踪情况。在稳态和低频工况下,压差 Δp仅为 15~20 bar (10 bar=1 MPa)。但当负载压力方向突变时,由于泵的惯性以及油液和管路的压缩特性,瞬态压差可达80~90 bar。
上述仿真结果表明,基于负载敏感原理的新型PBW系统具有最优的综合性能,最接近于理想PBW系统。
3.3 四余度PBW系统仿真结果
对四余度系统在故障模式下的控制性能开展仿真研究。使用0.5 Hz的方波信号和2 Hz的正弦信号作为测试信号。由图10的仿真结果表明,即使当两通道故障时,系统的控制性能仍然是可接受的。
图11为四余度系统的频响性能仿真结果。使用的测试正弦信号幅值为±20%全行程,频率从0.1~20 Hz。在无故障时的系统带宽(-3 dB)为6 Hz。随着故障通道的增加,带宽逐渐下降,分别为 5、2、1 Hz。
上述仿真结果表明,该四余度PBW系统具有两次故障工作、三次故障安全的能力。
4 结论
(1)与现有功率电传系统相比,本文所提出的基于负载敏感原理的新型功率电传系统具有更好的综合性能,是最接近于理想功率电传系统概念的方案。
(2)在新型功率电传系统基础上,设计的四余度功率电传方案具有二次故障工作、三次故障安全的冗错能力,可满足未来载人航天运输系统对推力矢量控制器可靠性的要求。
(3)与电动伺服系统相比,电液伺服系统具有功率密度大、频响高、位置刚度大、无卡死等固有优点。但也存在效率较低、可靠性低、维护复杂等问题。本文所提出的新型功率电传系统,可保留电液伺服系统原有优势,并解决效率和可靠性等问题,从而重新焕发电液伺服系统的生命力。
(4)在我国未来固体助推器和固体运载火箭中,特别是对推力矢量控制系统输出力和动态要求较高的场合,本文所提出的新型功率电传系统方案具有比电动伺服系统更大的吸引力。
[1] 朱康武,傅俊勇,曾凡铨,等.运载火箭电液推力矢量控制系统总体设计策略研究[J].宇航学报,2014,35(6):685-692.
[2] Thomas B M.Preliminary investigation on battery sizing investigation for thrust vector control on Ares I and Ares V launch vehicles[R].NASA/TM-2011-216899, 2011.
[3] Ohtsuka Hirohito, Yagi Kazuhiro, Kishi Kohichi, et al. Research on advanced solid rocket launcher[J].Engineering Review, 2010, 43(1):29-36.
[4] Stefana Bianchi. Vega launcher: final preparation for qualification flight[C]//Proceedings of the 47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, San Diego, California, USA, July 31- Aug 03, 2011.
[5] Ohtsuka Hirohito, Yagi Kazuhiro, Kishi Kohichi, et al. Design of 25kW redundant linear electro-mechanical actuator for thrust vector control applications[C]// Proceedings of the 1st International and 16th National Conference on Machines and Mechanisms, IIT Roorkee, India, Dec 18-20,2013.
[6] 吴昊,李清,乔森,等.三余度机电伺服机构试验验证[J].导弹与航天运载技术,2015(5):25-29.
[7] Alden R E. Flight demonstration, evaluation and proposed applications for various all electric flight control actuation system concepts[R].AIAA 93-1171.
[8] Elbuluk M E, Kankam M D.Motor drive technologies for the power-by-wire (PBW) program: options, trends and tradeoffs. I. Motors and controllers[J]. IEEE, Aerospace and Electronic Systems Magazine, 1995, 10(11): 37-42.
[9] Habibi S, Goldenberg A. Design of a new high performance electro-hydraulic actuator[J]. IEEE/ASME Transactions on Mechatronics, 2000, 5(2): 158-164.
[10] 胡务农. 功率电传作动系统发展策略[C]//大型飞机关键技术高层论坛暨中国航空学会2007年年会文集,2007.
[11] McCullough K R. Design and characterization of a dual electro-hydrostatic actuator[D]. School of Graduate Studies in Partial Fulfillment of the Requirements for the Degree of Master of Applied Science in the Department of Mechanical Engineering, McMaster University, 2011.
[12] Robert N. Performance of an electro-hydrostatic actuator on the F-18 systems research aircraft[R]. NASA/TM-97-206224, 1997.
[13] Aoki Y, Uehara K, Hirose K, et al. Load sensing fluid power systems[J]. Training, 1994, 20(8): 12-10.
[14] 夏立群,张新国. 直接驱动阀式伺服作动器研究[J]. 西北工业大学学报, 2006, 24(3): 308-312.
[15] Michael G, Scott S. Two-fault tolerant electric actuation systems for space applications[C]//Proceedings of the 42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit. Sacramento, California, USA, July 9-12, 2006.
[16] Michael G, Mark D, Scott S. Human-rated upper stage thrust vector control system architecture selection[C]// Proceedings of the 43rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Cincinnati, OH, July 8-11, 2007.
(编辑:吕耀辉)
New quad-redundant power by wire thrust vector control system
ZHU Kang-wu, FANG Cheng, JI Bao-liang, FU Jun-yong
(Shanghai Institute of Spaceflight Control Technology, Shanghai 201109, China)
In this paper, some currently available PBW systems were analyzed firstly. According to characteristics of launching vehicle, the concept of ideal PBW system was proposed. The new PBW system based on load sensing principle was designed. Based on this, a new quad-redundant PBW system with high reliability that meets the requirement of manned space flight was proposed. By simulation studies, the new PBW system shows significantly better overall performances than the other PBW systems. It is the system that is mostly close to the concept of ideal PBW system. The simulation results of quad-redundant PBW system under faulty conditions show that the system has redundant performance of twice-fault working and three-fault safe. The new PBW system has a wide potential application in thrust vector control of solid rocket engine and hydrogen oxygen engine.
power by wire;thrust vector control;servo system;launching vehicle
2016-02-24;
2016-07-25。
民用航天“十二五”技术预先研究项目(科工技〔2013〕669号)。
朱康武(1983—),男,博士,研究方向为运载火箭高可靠性伺服系统设计。E-mail:zjuzkw@zju.edu.cn
V435+.23
A
1006-2793(2017)04-0525-07
10.7673/j.issn.1006-2793.2017.04.022
猜你喜欢
装备环境工程(2022年9期)2022-10-13 05:23:34
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
化工管理(2021年7期)2021-05-13 00:46:16
装备制造技术(2020年3期)2020-12-25 05:22:38
大众科学·中旬(2020年6期)2020-06-29 07:27:36
山东工会论坛(2020年3期)2020-06-10 13:50:44
航空兵器(2020年6期)2020-01-25 16:23:16
测控技术(2018年12期)2018-11-25 09:37:44
专用汽车(2016年4期)2016-03-01 04:14:27
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
