FY-4卫星微振动抑制技术研究
2017-09-14 09:51董瑶海周徐斌申军烽刘兴天虞自飞
上海航天 2017年4期
董瑶海,周徐斌,申军烽,刘兴天,虞自飞
(1.上海航天技术研究院,上海 201109; 2.上海卫星工程研究所,上海 201109)
FY-4卫星微振动抑制技术研究
董瑶海1,周徐斌2,申军烽2,刘兴天2,虞自飞2
(1.上海航天技术研究院,上海 201109; 2.上海卫星工程研究所,上海 201109)
根据装载干涉式大气垂直探测仪对微振动抑制的要求,对风云四号(FY-4)卫星的微振动抑制技术进行了研究。通过统计星上振源,规划整星级频谱,研究微振动传播机理,设计了振源隔离和载荷隔振的双级隔振系统。给出了动量轮的隔振设计,将动量轮的安装支架由刚性变为基于六角架(Hexapod)构型的非线性变刚度柔性支架,隔离动量轮传递至卫星平台的振动干扰,从源头控制振动。分析了发射段幅频特性和在轨段隔振性能,结果表明试验结果与理论分析一致。在此基础上,采用隔振组件和解锁组件并联使用方式,实现干涉式大气垂直探测仪的二次隔振设计,以进一步抑制卫星平台传递至探测仪的微振动干扰。地面微振动试验和在轨微振动实测结果表明:隔振系统能使卫星平台传递至载荷安装面的微振动量级控制在0.1×10-3g以下,满足指标要求。FY-4卫星微振动抑制技术可为其他卫星的微振动抑制提供参考。
风云四号卫星; 微振动; 隔振系统; 非线性振动; 动量轮; 敏感载荷; 传递率; Hexapod结构
0 引言
微振动是指卫星在轨运行期间,由活动部件(如动量轮、制冷机等)正常运动造成的振动或振荡,具幅值小、频谱宽等特点[1]。FY-4卫星装载的干涉式大气垂直探测仪(以下简称探测仪)为光谱类载荷,与通常的成像类卫星不同,其正常工作时不仅需要物像间严格的对应关系,而且要求确定光谱位置及干涉图对比度的变化。
为减小平台微振动对敏感载荷性能的影响,保证敏感载荷的微振动环境,常采取被动隔振措施对扰动源和敏感载荷进行微振动隔离。被动隔振易隔离中高频振动,且可靠性较高,在国内外已被广泛使用。在国外,对属于干涉仪敏感载荷的哈勃太空望远镜,以及大型结构的微振动控制进行了研究[2-5]。在国内,文献[6]对近年来的卫星微振动控制技术进行了总结。文献[7-12]对卫星微振动隔离进行了研究。虽然这些研究获得了大量理论成果,但微振动抑制的工程应用仍存在明显不足,如未考虑主动段的过载、隔振系统的体积重量等限制条件等。本文对FY-4卫星的微振动抑制技术进行了研究。通过对星上振源的辨识,设计的动量轮微振动抑制系统能兼顾主动段和在轨段的振动隔离,并采用多级隔振设计以进一步提高微振动抑制性能,在设计和工程应用中有其新颖性。
1 FY-4卫星微振动研究
微振动是一个复杂的系统性问题。在FY-4卫星研制过程中开展了以下研究和攻关[13]。
a)统计星上振源,研究振源特性,识别微振动产生机理及频谱成分,为星上主要振源产品的选配、验收、布局、减振提供依据。星上主要扰动为活动部件引起的振动响应,其振动信号在时域和频域都实时反映了设备工作状态信息。因此,了解和掌握活动部件的振动机理,对监测部件运行状态和提高振动抑制的有效性有重要的理论意义和实际工程应用价值。活动部件的振动产生机理有多种,主要包括不平衡、不对中、碰撞、摩擦、松动和吸附等。对不同的产品,以及同种产品不同的研制阶段,其频谱特性也会不完全一致,因此需对每个主要活动部件进行振动测量及频谱分析,以掌握其振动特性。
b)规划整星级频谱,有效避开探测仪动镜模态频率附近极其敏感的谱段和其他潜在的耦合共振因素。频谱规划首先需掌握敏感载荷对微振动的约束要求,如敏感载荷对微振动的敏感频段及其对应的振动量级。在此基础上,根据星上振源的频谱统计,将各振源的频谱特性在统一的坐标系中表示,规划出敏感载荷不受微振动干扰的安全区域及潜在的风险区域。针对风险区域,提出综合的频谱规避方案。
c)研究微振动在复杂星体内传播机理,识别微振动非线性传递特性和局部共振特性,为卫星平台微振动抑制设计提供依据。微振动传递特性的研究,直接影响微振动抑制系统设计、微振动仿真模型建立,以及响应预估的正确性。因关于微振动传递特性的机理认识不清,缺乏相关的理论支撑,故微振动传递特性研究一般以试验方法为主,初步掌握微振动在简单结构和复杂结构中的传递规律。一般来说,卫星平台的非线性既包含刚度非线性又包含阻尼非线性,而刚度非线性远强于阻尼非线性。从主结构传递特性来看,微振动从底板到顶板一般有近1个量级的衰减。
d)针对动量轮进行隔振设计,从源头控制主振源传递至卫星平台的微振动干扰。
e)针对探测仪进行二级隔振设计,采用隔振组件和解锁组件并联方式,进一步抑制卫星平台传递至探测仪的微振动干扰。
f)在探测仪内,采用对置双活塞压缩机并与主动平衡减振膨胀机分置的方式,有效抑制探测仪内部的振动干扰。
g)搭载微振动测量系统,实现卫星主动段、变轨段、在轨段全程振动的测量,为载荷的微振动监测、隔振效果评估,以及星上运动部件故障诊断等提供依据。
2 动量轮隔振设计
动量轮作为星上的主要振动源,其引发的微振动会传递至载荷安装界面,从而诱发探测仪动镜倾斜或动镜运动系统共振,造成光程差超差,导致光谱图无法反演或出现“鬼线”(如图1所示),且难以通过技术手段进行甄别或消除,其高频频率成分直接进入分析光谱内,混淆真实谱线[14-15]。试验证明:在探测仪动镜模态频率附近,0.2×10-3g的微振动就会导致动镜速度稳定度失稳和其光谱性能的明显退化。

图1 微振动对干涉光谱载荷影响Fig.1 Effect of micro-vibration on interferometric payload
对动量轮控制属于从源头进行振动控制,常见的减振方法有吸振和隔振等[16-17]。对FY-4卫星动量轮的隔离,首先应保证通过发射段的振动影响,其次需保证在轨段的隔振性能。为在6个方向均有良好的隔振效果,要求隔振动系统具良好的解耦度,因此隔振支架整体上采用基于会聚式Hexapod构型,使用微振动隔振装置与非线性变刚度阻尼缓冲装置并联的设计方式,这样同时兼顾发射段大量级振动、冲击、过载等问题,以及在轨段微振动隔振需求。
2.1发射段幅频特性分析
动量轮隔振支架本质是一个非线性结构,其中的变刚度阻尼缓冲装置原理如图2(a)所示。图2(a)中:Kf1,Kf2,Kvem分别为隔振器和阻尼单元的刚度;Gap为缓冲装置中的间隙部分;Kbumper为缓冲装置中的缓冲部分。含缓冲装置的隔振器刚度曲线如图2(b)所示,其中曲线呈折线变化,中间一段为缓冲装置的小刚度区,该刚度区主要由隔振装置自身提供;两侧的刚度线为大刚度区,该刚度由隔振装置和缓冲装置同时作用。图2(b)中:d为缓冲刚度的位移;b为间隙距离;F为施加在缓冲装置上的力。
在轨段是Kf1,Kf2,Kvem作用,发射段则主要是Kbumper作用。

图2 缓冲装置Fig.2 Cushion structure
FY-4卫星动量轮隔振支架可简化为图2所示的含间隙的弹簧质量块系统。设质量块的质量为m,弹簧1的刚度为k1,质量块与弹簧2接触后两弹簧的总刚度为k2=k1+Kbumper,间隙宽度a0=b,则系统的刚度可用分段线性函数k(x)表示,有
(1)
列写系统受迫振动的方程,定义(ω0)2=k1/m为系统的固有频率,ε=(k2/k1)-1为未定义的参数,ω为激励频率,ζ为系统阻尼比,a为系统的响应。设as为系统的稳态响应幅值,ωF0=(ω0)2B,可得动量轮隔振支架非线性幅频特性曲线如图3所示。图3(a)中:横坐标为激励频率与基本固有频率之比;纵坐标为系统的稳态响应幅值与间隙之比;黑色实线表示振动频率与振幅的关系。图3(b)中:幅频曲线是以该振动频率特征曲线为骨架的曲线族。由图3可知:随振动幅值输入的增大,动量轮支架幅频特性从线性逐渐表现为明显的非线性“跳跃”特性(图3(a)),与动量轮支架力学试验曲线的特征一致(图3(b))。
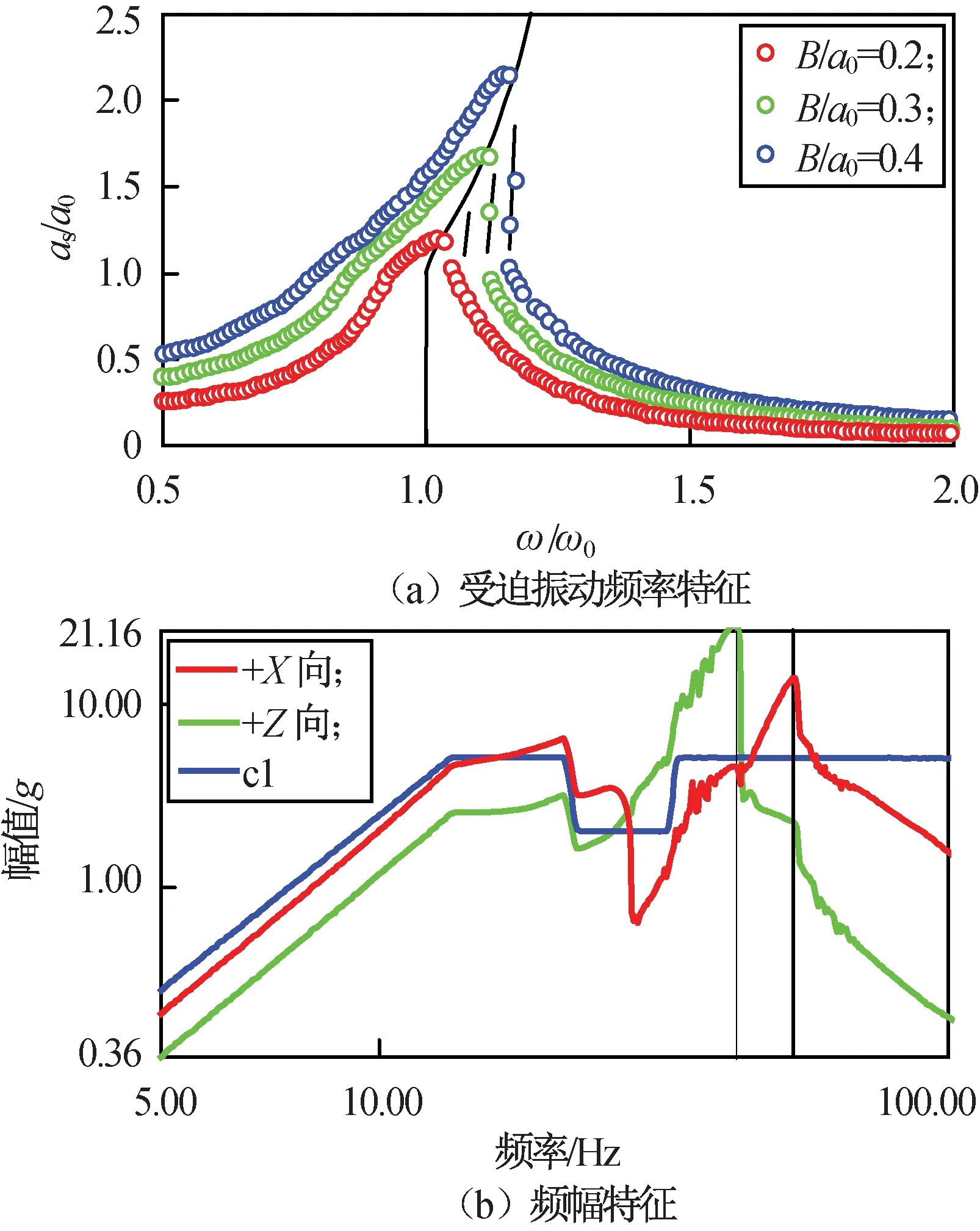
图3 分段线性系统的受迫振动频率特征与幅频特性Fig.3 Frequency response characteristic of system with piesewise linearity
2.2在轨段隔振性能分析
在轨段,动量轮支架可简化为基于Hexapod平台的6个微振动隔振装置并联组成的隔振系统,原理如图4所示。

图4 隔振系统Fig.4 Designed vibration isolation system
设等价安装点为全局坐标系原点O,坐标轴为OX,OY,OZ;真实连接处的局部坐标系原点为Oi(i=1,2,…,6),坐标轴为OXi,OYi,OZi。令点O至点Oi的位置矢量为ri。全局坐标系变换至隔振器i所在局部坐标系的坐标轴方向需经过坐标变换。若被隔振物体的质量阵为M,则建立动量轮隔振支架动力学方程为
(2)
根据动量轮隔振支架的动力学方程,可分析被隔对象质心高度,隔振器分布半径、夹角、安装倾角、投影夹角和刚度比系数对带宽及系统带宽的影响,并根据仿真分析结果优化这些系统参数,使隔振支架的综合性能达到最优。仿真分析表明:针对频率40 Hz以上的动量轮激励,理论上动量轮隔振支架的隔振效率大于80%。
对设计的FY-4卫星动量轮支架进行传递率试验,结果如图5所示。

图5 动量轮支架传递函数Fig.5 Frequency response function of flywheel micro-vibration isolation chassis
试验表明:在频率40~50 Hz范围内动量轮支架最低减振效率为71.8%;在频率50~60 Hz范围内最低减振效率为77.6%;在频率60~100 Hz范围内最低减振效率为88.1%,由此可知试验结果与理论分析的一致性良好。
对动量轮这类的主振源进行微振动抑制是较直接的控制措施,但动量轮作为姿轨控分系统的主要执行部件,隔振设计稍有不当将直接影响卫星的控制姿态。因此,在对动量轮进行隔振设计时不仅需考虑隔振指标,而且要考虑各分系统的指标要求。
3 探测仪隔振设计
3.1隔振系统工作原理
探测仪隔振系统主要由柔性隔振单元3个和刚性固支单元5个构成,其构成和工作流程如图6所示。刚性固支单元在主动段起承载作用。入轨后,根据实际情况选择是否解锁释放。释放后,柔性隔振单元将探测仪弹起1~2 mm的距离,隔振系统开始起振动隔离作用。
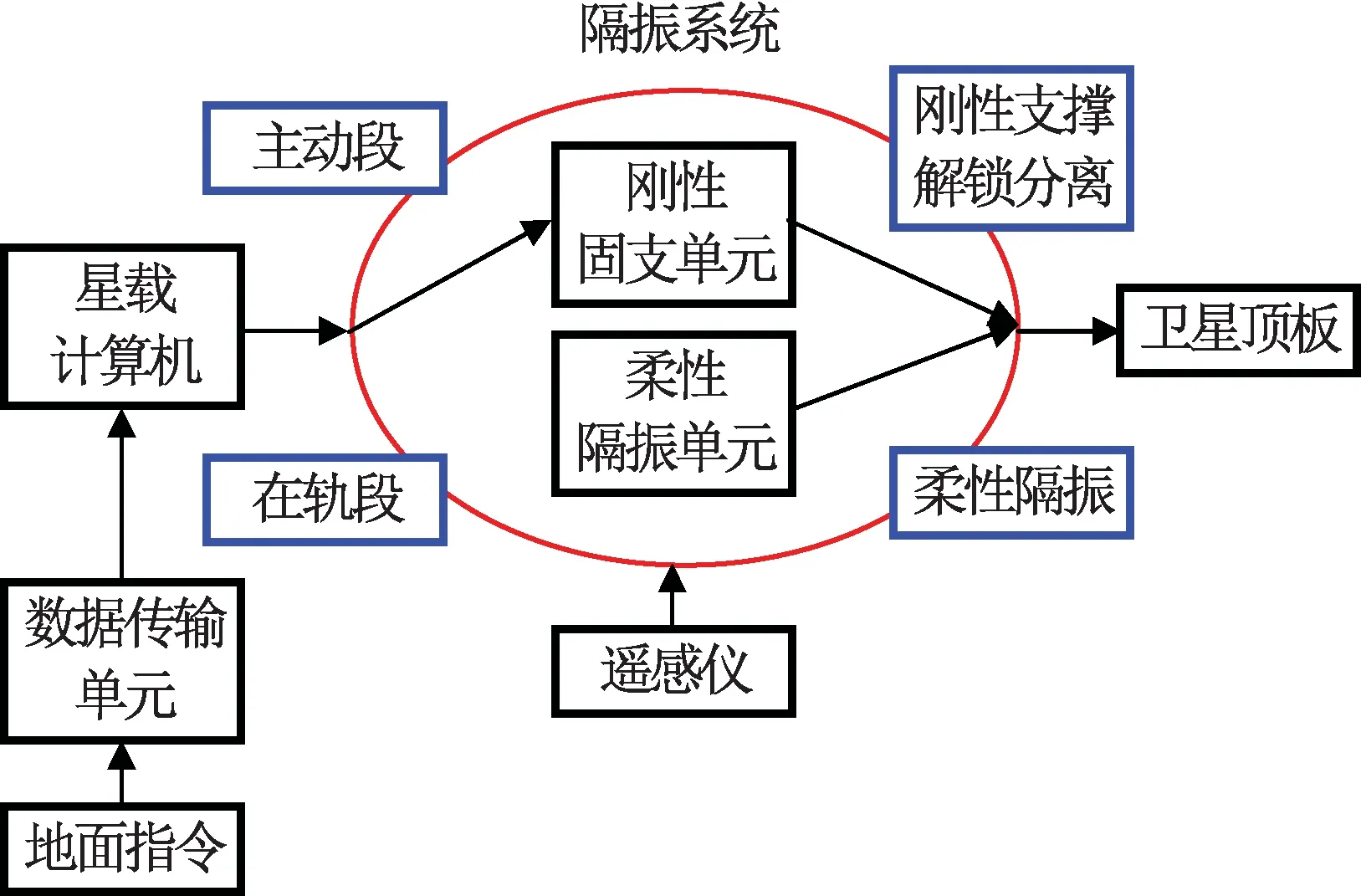
图6 隔振系统组成和工作流程Fig.6 System composition and function flow of vibration isolation system
3.2隔振系统优化设计
根据输入条件及顶板上的布局,设置柔性隔振单元为3个,呈120°均匀分布的布局形式[18]。隔振单元布局范围为509.3~1 200 mm,初始设定Z向隔振频率约14 Hz,Z向压缩量约1.27 mm。在以上条件的基础上寻找合适的横向刚度、隔振单元的支撑角度,以及安装位置,以实现隔振系统频带较低和系统解耦性较好的设计目标。
根据隔振系统动力学方程,用引入能量法,依据隔振系统各阶模态的参与程度判断系统的耦合程度[19]。设横向/轴向的刚度的比值为u,其变化范围为0.2~2.0(根据工程能实现及实际使用的因素综合考虑),隔振单元安装倾角变化为0°~90°。分析横向刚度和柔性单元倾角变化对带宽及系统最低频率的影响,结果分别如图7~10所示。

图7 隔振系统最小带宽与安装倾角关系Fig.7 Relationship between minimum bandwidth and inclination angle of vibration isolation system

图8 隔振系统最小带宽与横/轴刚度比关系Fig.8 Relationship between minimum bandwidth and ratio of lateral and translational stiffness of vibration isolation system
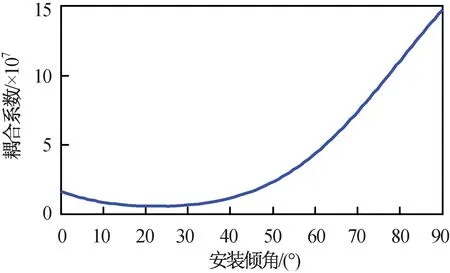
图9 隔振系统耦合系数与安装倾角关系Fig.9 Relationship between coupling coefficient and inclination angle of vibration isolation system
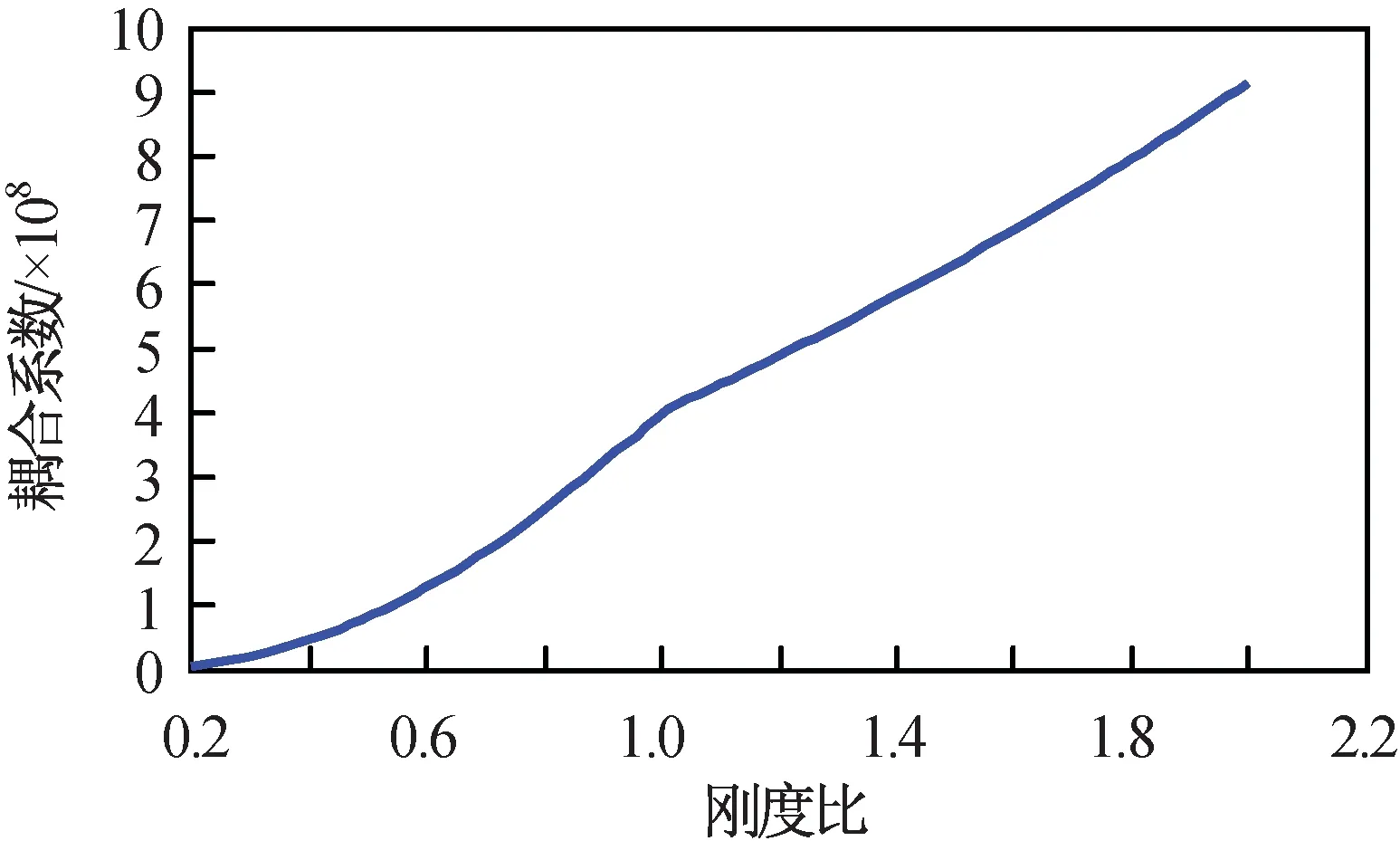
图10 隔振系统耦合系数与横/轴刚度比关系Fig.10 Relationship between coupling coefficient and ratio of lateral and translational stiffness of vibration isolation system
由图7~10可知:u与隔振系统的频带宽度成正向关系,但实际应用u也不宜过小,否则隔振系统固有频率过小,隔振器强度降低,合适的取值范围为0.4~0.8;竖直安装(安装倾角0°)时耦合性差异较小,安装倾角22°时耦合性最小,过质心耦合性差异亦较小;u对耦合性的影响大于倾角,u越小耦合性越小;隔振单元倾斜安装的耦合性能虽好,但考虑工程中设计、装配等因素,其实际优势不明显。因此,实际应用中,选择隔振单元竖直放置(适应性更广,无需过渡连接块,减少系统重量),u的取值范围为0.4~0.8(1.0以下),以在工程应用中取得较高的综合性能。
对隔振系统振动抑制性能的分析,较合理的方式是将隔振系统引入整星微振动仿真模型,分析在轨状态的隔振性能[20]。其中,隔振系统的建模涉及隔振器的刚度矩阵、阻尼特性,以及隔振器组合后的系统特性,仿真输入加速度18×10-3g的宽频信号激励,隔振前后的仿真结果如图11所示。分析结果表明:在宽频随机信号激励和特定的危险频率信号激励两种工况下,隔振系统的隔振效率均大于95%,隔振效果非常明显。
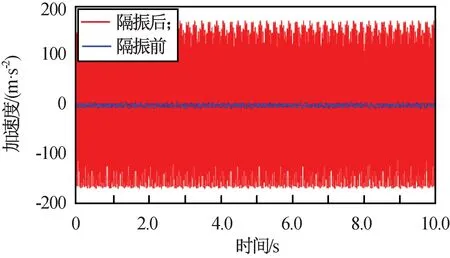
图11 隔振系统隔振前后对比Fig.11 Performance of vibration isolation system
综上,FY-4卫星采用隔振器竖直放置、3隔振器并联组成的隔振系统,隔振效果明显,满足设计要求。由此可知:在对动量轮这类主振源隔振的基础上,再次对载荷进行微振动隔离是作为星上微振动抑制的备份措施,若卫星入轨后,星上仍存在其他的振动干扰影响载荷,则可启用载荷的隔振系统,确保载荷的主要性能指标。
4 整星微振动试验
为考核微振动抑制系统的性能,对FY-4卫星进行了整星微振动试验,试验包括地面试验和在轨试验。地面试验采用近零刚度悬吊系统模拟失重环境,采用在轨飞行模式模拟星上各转动部件运转,测试关注点的加速度响应。在轨试验主要通过在轨微振动测试系统测试在轨微振动响应,下传至地面进行微振动分析。
4.1地面微振动试验
微振动地面试验环境需解决环境干扰和在轨失重环境模拟等问题。环境干扰主要是地面振动对测量结果的影响,以及空气和电磁环境对测量系统的影响,主要措施包括对地基进行隔振设计、对试验环境进行屏蔽(避免噪声和空气流动造成的影响)等;在轨失重环境主要是指模拟自由边界条件问题,一般需要近零刚度悬吊系统。
FY-4卫星微振动试验过程中,环境振动干扰≤1.0×10-5g;悬吊系统垂向基频0.22 Hz,横向基频0.17 Hz,满足整星微振动试验所需的环境要求。
取其极端恶劣工况,6个动量轮由0 r/min同步加速至5 000 r/min,比较动量轮支架隔振前后的振动响应可得隔振支架自身的性能特性,结果如图12、13所示。
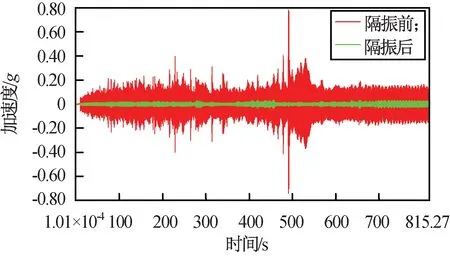
图12 动量轮支架隔振前后时域响应对比Fig.12 Time history of tested vibration with and without flywheel vibraiton isolation system
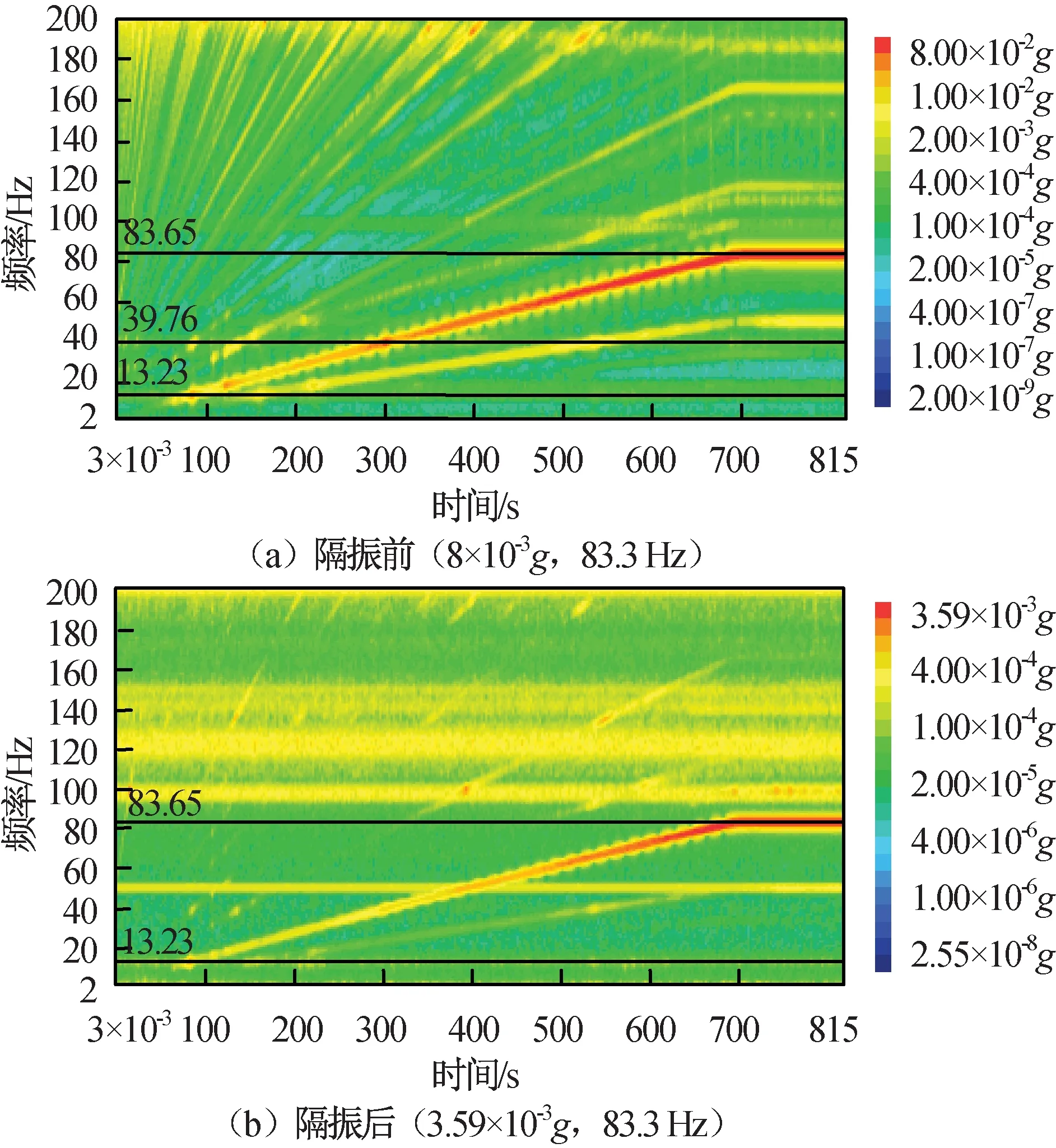
图13 动量轮支架隔振前后频域响应对比Fig.13 Tested vibration in frequency domain with and without flywheel vibration isolation system
在6个动量轮加速过程中,敏感载荷探测仪安装面的振动响应如图14所示。
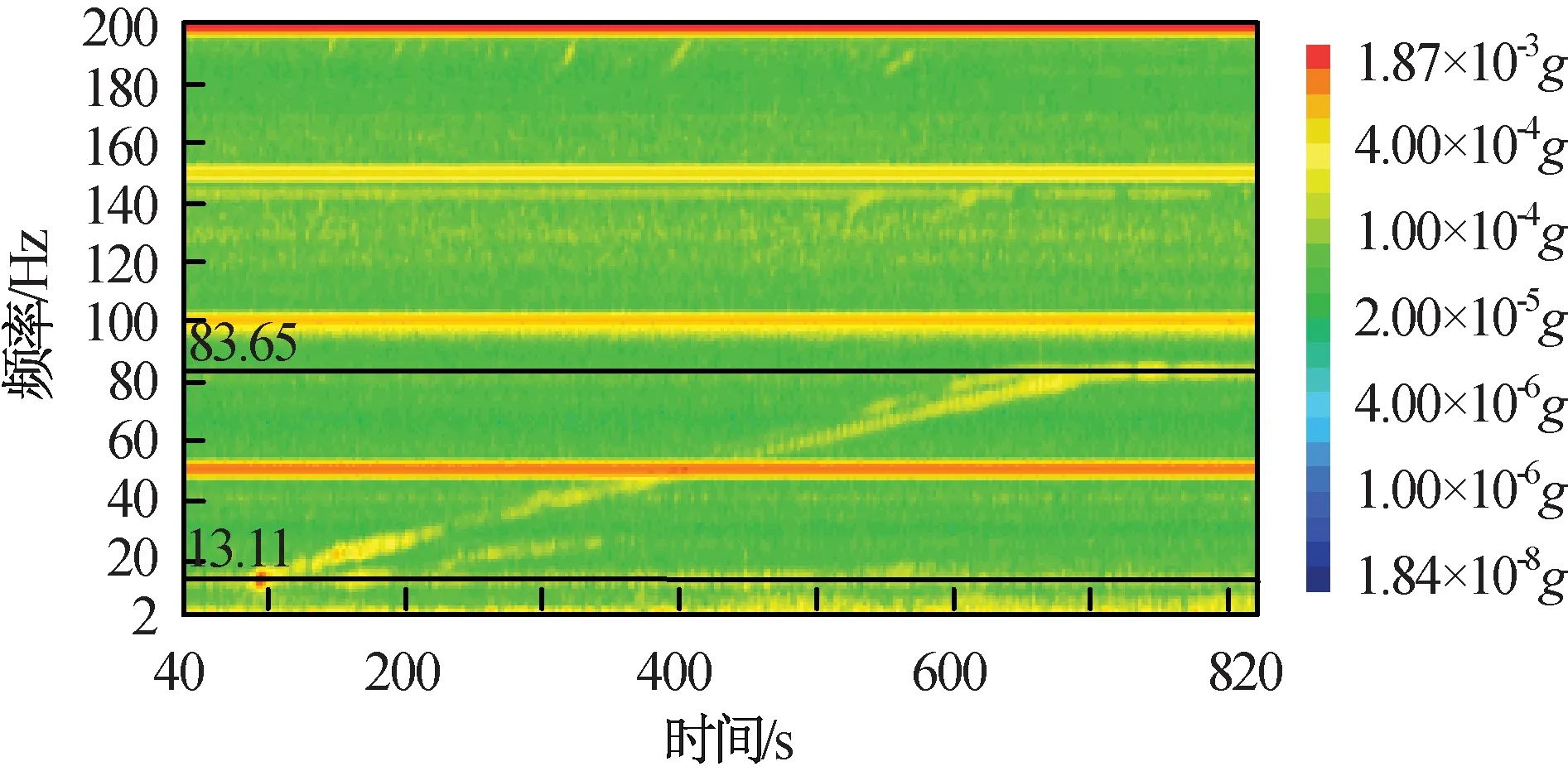
图14 探测仪安装面最大响应Fig.14 Maximum vibration on payload installation platform
由图12~14可知:动量轮隔振支架在中高频段的减振效率大于75%,符合设计指标;探测仪安装面响应1×10-3g~3×10-3g,发生在50,100,150 Hz等频点,该频点是探测仪制冷机的工作频率及其倍频成分,除去制冷机的振动干扰,卫星平台传递至载荷的微振动干扰为0.1×10-3g~0.2×10-3g。
同时,根据载荷的测试数据表明,相关技术指标与其在实验室环境中的测量指标一致,说明星上微振动环境满足载荷的指标要求。
4.2在轨微振动测量
FY-4首发星于2016年12月11日0:11在西昌卫星发射中心发射升空,至2016年12月17日17:17完成5次变轨和定点捕获,精确定点至东经99.5°;2017年3月9日完成了在轨段微振动测量和数据下传,如图15~16所示。
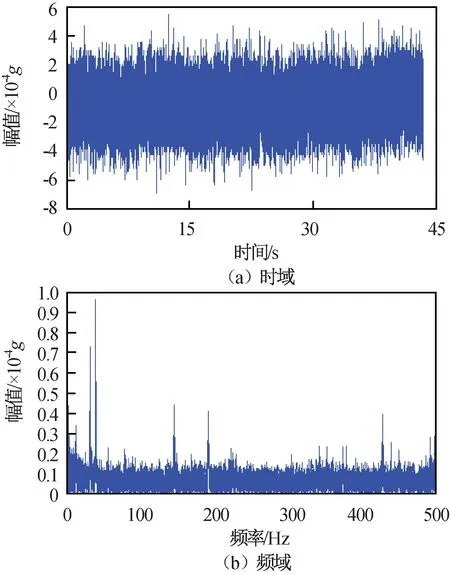
图15 探测仪制冷机未开时卫星顶板 载荷界面处微振动响应Fig.15 Vibration on top plate for payload installed with cryocooler powered off
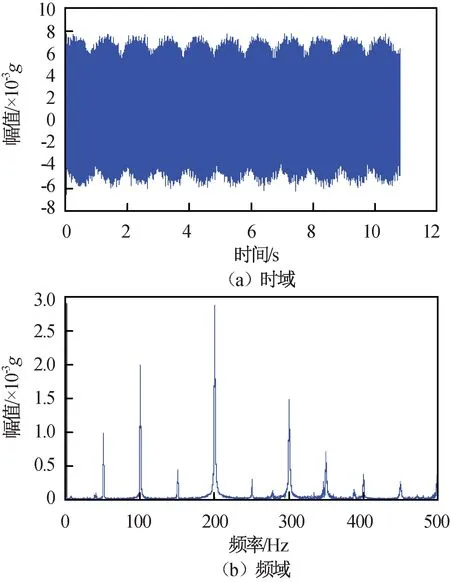
图16 探测仪制冷机开机后卫星顶板 载荷界面处微振动响应Fig.16 Vibration on top plate for payload installed with cryocooler powered on
分析在轨段工况(4个动量轮转速分布在约30 Hz)的数据,可发现在200 Hz范围内,探测仪制冷机关机时卫星顶板的振动响应小于0.1×10-3g(动量轮工频);探测仪制冷机开机后,卫星顶板的振动响应为1×10-3g~3×10-3g,发生在50,100,150 Hz等制冷机的工频及其倍频处。在轨测量结果与正样星整星微振动试验的近似工况(6个动量轮同步加速至5 000 r/min)测量结果一致。载荷在轨实测表明:相关技术指标与其在实验室环境中的测量指标一致,说明FY-4首发星上微振动环境满足载荷的指标要求。
综上,FY-4首发星采用的微振动抑制措施有效,微振动在轨测量系统工作正常,测量结果可信。
5 结束语
本文针对FY-4卫星微振动抑制的要求,提出了振源隔离和载荷隔振的双级隔振系统设计方法,完成了隔振系统的研制。地面微振动试验和在轨飞行测试结果表明:隔振系统能使卫星平台传递至安装面的微振动量级控制在低于0.1×10-3g,满足了指标要求。后续,针对FY-4卫星8年以上的设计寿命,需进一步开展动量轮隔振支架可靠性增长的研究。FY-4卫星微振动抑制技术可为相关卫星的微振动抑制提供借鉴和参考。
[1] 董瑶海. 航天器微振动——理论与实践[M]. 北京: 中国宇航出版社, 2015: 1-3.
[2] BRONOWICKI A, MACDONALD R, GURSEL Y, et al. Dual-stage vibration isolation for Optical Interferometer Missions[J]. Proc SPIE, Astronomical Telescopes & Instrumentation, 2002, 4852-68: 753-763.
[3] DAVIS L P, WILSON J F, JEWELL R E, et al. Hubble Space Telescope reaction wheel assembly vibration isolation system[R]. NASA N87-22702,1986.
[4] BRONOWICKI A. A layered vibration control strategy for space telescopes[C]// Smart Structures and Materials Conference 2003: Smart Structures and Integrated Systems. Bellingham: SPIE, 2003: 5056, 487-496.
[5] BRONOWICKI A. Active vibration control of large optical space structures[J]. Smart Materials and Structures, 1999, 8(6): 740-752.
[6] 孟光. 周徐斌. 卫星微振动及控制技术进展[J]. 航空学报, 2015, 36(8): 2609-2619.
[7] 杨剑锋. 空间光学载荷微振动关键技术研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2016.
[8] 刘兴天, 郑京良, 申军烽. 隔振器安装位置对卫星载荷隔振性能的影响研究[J]. 上海航天, 2016, 33(6): 67-71.
[9] 谭天乐, 朱春艳, 朱东方, 等. 航天器微振动测试、隔离、抑制技术综述[J]. 上海航天, 2014, 31(6): 36-45+51.
[10] 庞世伟, 潘腾, 毛一岚, 等. 某型号卫星微振动试验研究及验证[J]. 航天器环境工程, 2016, 33(3): 305-311.
[11] ZHOU W D, LI D X, Design and analysis of an intelligent vibration isolation platform for reaction/momentum wheel assemblies[J]. Journal of Sound and Vibration, 2012, 331: 2984-3005.
[12] HUANG X C, SUN J Y, HUA H X, et al. Modeling and optimization of octostrut vibration isolation platform by FRF-based substructuring method[J]. ASCE Journal of Aerospace Engineering, 2015, 28: 3.
[13] 董瑶海. 风云四号气象卫星及其应用展望[J]. 上海航天, 2016, 33(2): 1-8.
[14] EYERMAN C E, SHEA J F. A systems engineering approach to disturbance minimization for spacecraft utilizing controlled structures technology[R]. MIT SERC Report#2-90, Massachusetts Institute of Technology: MIT Space Engineering Research Center, 1990.
[15] MELODY J W. Discrete-frequency and broadband reaction wheel disturbance models[R]. Interoffice Memorandum 3411-95-200csi, La Canada Flintridge: Jet Propulsion Laboratory, 1995.
[16] 石新宇, 周徐斌, 申军烽, 等. 航天器电磁变频吸振器性能分析与测试[J]. 噪声与振动控制, 2015, 35(5): 60-64.
[17] 虞自飞, 周徐斌, 申军烽. 卫星动量轮隔振与吸振联合减振系统设计[C]// 中国空间科学学会2013年空间光学与机电技术研讨会. 西安: 中国空间科学学会, 2013: 241-246.
[18] 申军烽, 杜胜, 周徐斌, 等. 高精度光学有效载荷微振动隔振系统设计与分析[C]// 2011年全国机械动力学学术大会. 杭州: 中国振动工程学会机械动力学专业委员会, 2011: 124-129.
[19] 申军烽, 周徐斌, 薛景赛, 等. 弹性元件刚度特性对隔振系统解耦度的影响分析[C]// 中国宇航学会飞行器总体专业委员会第12届学术研讨会. 延吉: 中国宇航学会, 2012: 436-440.
[20] 蒋国伟, 周徐斌, 申军烽, 等. 卫星微振动虚拟仿真技术研究及应用[J]. 计算机测量与控制, 2011, 19(9): 2206-2209.
StudyonMicro-VibrationSuppressionTechnologyofFY-4Satellite
DONGYao-hai1,ZHOUXu-bin2,SHENJun-feng2,LIUXing-tian2,YUZi-fei2
(1. Shanghai Academy of Spaceflight Technology, Shanghai201109, China;2. Shanghai Institute of Satellite Engineering, Shanghai201109, China)
According to the requirement of micro-vibration source isolation for interferometer detector, the micro-vibration suppression was studied for FY-4meteorological satellite in this paper. The two level micro-vibration isolation system which composed of vibration source and sensitive payload isolation devices was designed by onboard vibration source statistics, the spectrum planning on the whole satellite level and the mechanism research of micro-vibration propagation. The vibration isolation was designed for reaction wheel. The vibration isolation device was designed based on the Hexapod configuration, the vibration from source hence be controlled as the vibration transferring into the satellite platform was weakened. The characteristics of amplitude-frequency in active phase and the performances of vibration isolation in orbit were analyzed. The results showed that the experiment results were well agreed with the simulation results. For the sensitive payload vibration isolation, the interferometer detector was isolated by isolators installed between the satellite top plate and the payload. The micro-vibration isolation experiments conducted both on ground and in orbit show that the two level vibration isolation system can effectively reduce the vibration transmitted into the payload and the vibration level is controlled at0.1×10-3gand below which satisfies the application requirement of FY-4satellite. The micro-vibration isolation technology of FY-4satellite has significance value and can also be used in other similar satellites.
FY-4meteorological satellite; micro vibration; vibration isolation system; nonlinear vibration; reaction wheel assembly; sensitive payload; transmissibility; Hexapod structure
1006-1630(2017)04-0020-08
2017-06-08;
:2017-06-30
国家自然科学基金资助(51505294);上海市科委项目资助(14XD1423000)
董瑶海(1966—),男,研究员,FY-4气象卫星总设计师,新世纪百千万人才工程国家级人选,享受国务院政府特殊津贴,主要研究方向为卫星总体、测试和控制。
P414.4;V414.5
:ADOI:10.19328/j.cnki.1006-1630.2017.04.003
猜你喜欢
水上消防(2022年2期)2022-07-22
中南大学学报(自然科学版)(2022年5期)2022-06-26
舰船科学技术(2021年12期)2021-03-29
北京航空航天大学学报(2020年3期)2021-01-14
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27
杂文月刊(选刊版)(2020年4期)2020-05-20
环球时报(2020-03-04)2020-03-04
中学生数理化(高中版.高考数学)(2020年1期)2020-02-20
环球时报(2017-06-07)2017-06-07